Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (2): 397-405.doi: 10.13229/j.cnki.jdxbgxb20191037
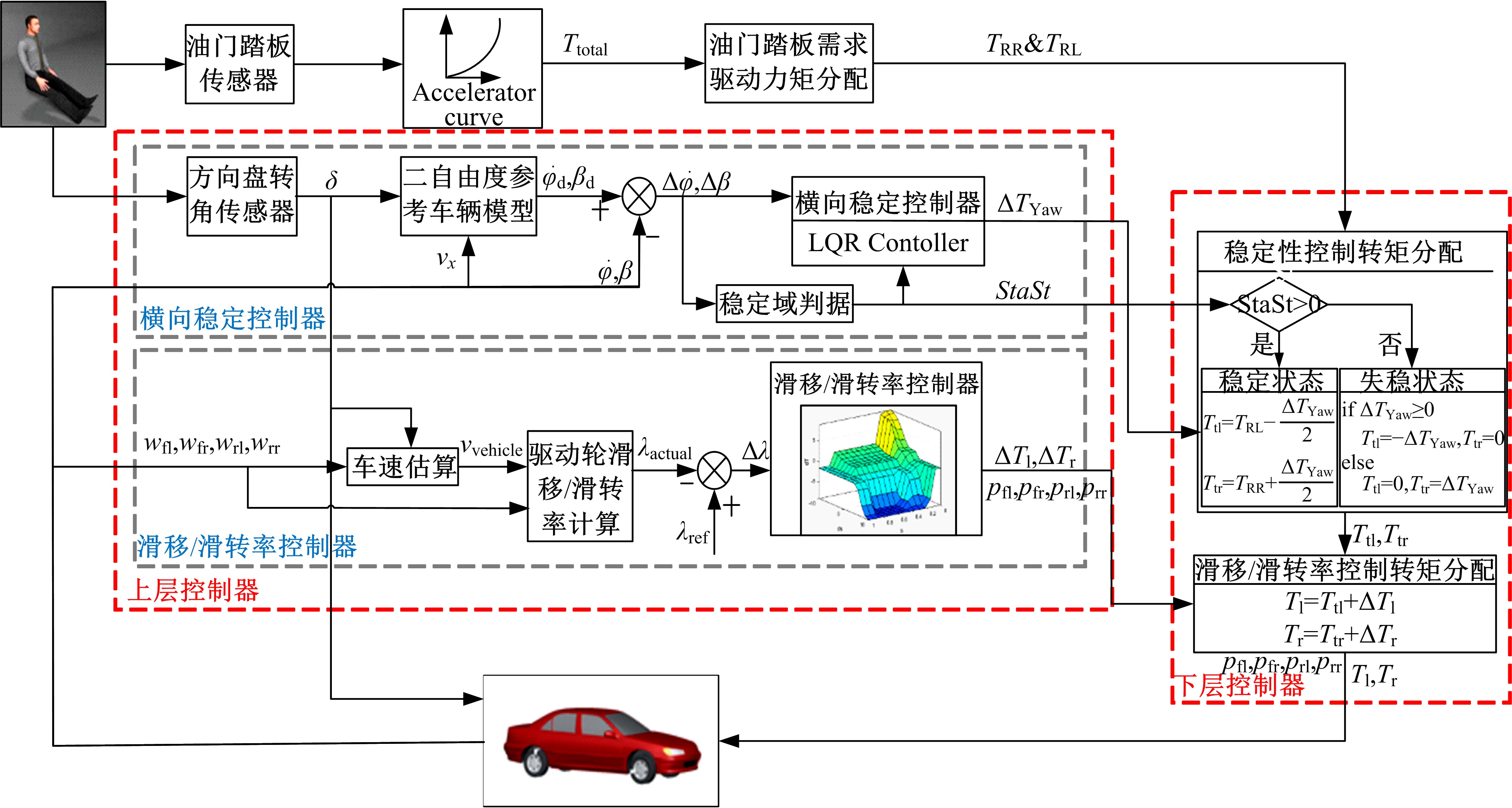
Stability control strategy for rear in⁃wheel motor drive vehicle
Guo-ying CHEN1( ),Jun YAO2,Peng WANG2,Qi-kun XIA2
),Jun YAO2,Peng WANG2,Qi-kun XIA2
- 1.State Key Laboratory of Automobile Simulation and Control,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
CLC Number:
- U461.6




| 1 | Najjari B, Mirzaei M, Tahouni A. Constrained stability control with optimal power management strategy for in-wheel electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(4): 1014-1032. |
| 2 | Asiabar A N, Kazemi R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(3): 549-567. |
| 3 | Zhang Z, Zhao W, Wang C, et al. Stability control of in-wheel motor electric vehicles under extreme conditions[J]. Transactions of the Institute of Measurement and Control, 2019, 41(10): 2838-2850. |
| 4 | Zhai L, Sun T, Wang J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4726-4739. |
| 5 | Chen Y, Chen S, Zhao Y, et al. Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle[J]. IEEE Access, 2019(7): 17017-17032. |
| 6 | Chae M, Hyun Y, Yi K, et al. Dynamic handling characteristics control of an in-wheel-motor driven electric vehicle based on multiple sliding mode control approach[J]. IEEE Access, 2019(7): 448-458. |
| 7 | Li B, Goodarzi A, Khajepour A, et al. An optimal torque distribution control strategy for four-independent wheel drive electric vehicles[J]. Vehicle System Dynamics, 2015, 53(8): 1172-1189. |
| 8 | Peng H, Wang W, Xiang C, et al. Torque coordinated control of four in-wheel motor independent-drive vehicle with consideration of the safety and economy[J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9604-9618. |
| 9 | 黄彩霞, 雷飞, 胡林, 等. 轮毂电机驱动汽车区域极点配置横向稳定性控制[J]. 汽车工程, 2019, 41(8): 905-914. |
| Huang Cai-xia, Lei Fei, Hu Lin, et al. Lateral stability control based on regional pole placement of in-wheel-motored electric vehicle[J]. Automotive Engineering, 2019, 41(8): 905-914. | |
| 10 | 于树友, 谭雷, 王伍洋, 等. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报: 工学版, 2019, 49(3): 934-942. |
| Yu Shu-you, Tan Lei, Wang Wu-yang, et al. Control of active four wheel steering vehicle based on triple⁃step method[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 934-942. | |
| 11 | 孟腾飞. 四驱轮毂电机电动汽车驱动转矩控制策略研究[D]. 镇江: 江苏大学汽车与交通工程学院, 2018. |
| Meng Teng-fei. Research on control strategy of drive torque for four-wheel-independent-drive electric vehicles[D]. Zhenjiang: School of Automotive and Traffic Engineering, Jiangsu University, 2018. | |
| 12 | Rajamani R. Vehicle Dynamics and Control[M]. Boston, Vehicle Dynamics and Control, 2006. |
| 13 | 郭建华. 双轴汽车电子稳定性协调控制系统研究[D]. 长春: 吉林大学汽车工程学院, 2008. |
| Guo Jian-hua. Research on electronic stability coordinated control system for double-axle vehicles[D]. Changchun: College of Automotive Engineering, Jilin University, 2008. | |
| 14 | 何仁, 冯海鹏. 基于峰值附着系数曲面的路面辨识算法[J]. 吉林大学学报: 工学版, 2020, 50(4): 1245-1256. |
| He Ren, Feng Hai-peng. Road surface identification algorithm based on peak adhesion coefficient surface[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(4): 1245-1256. |
| [1] | Fang-wu MA,Hong-yu LIANG,Qiang WANG,Yong-feng PU. In-plane dynamic crushing of dual-material structure with negative Poisson′s ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 114-121. |
| [2] | Dao WU,Li-bin ZHANG,Yun-xiang ZHANG,Hong-ying SHAN,Hong-mei SHAN. Visual detection method for vehicle braking time sequence based on slip rate identification [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 206-216. |
| [3] | En-hui ZHANG,Ren HE,Wei-dong SU. Numerical analysis of oil liquid sloshing characteristics in fuel tank with different baffle structures [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 83-95. |
| [4] | Lu XIONG,Yan-chao WEI,Le-tian GAO. Inertial measurement unit/wheel speed sensor integrated zero-speed detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 134-138. |
| [5] | Ji-qing CHEN,Qing-sheng LAN,Feng-chong LAN,Zhao-lin LIU. Trajectory tracking control based on tire force prediction and fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1565-1573. |
| [6] | Zhi-gang YANG,Ya-jun FAN,Chao XIA,Shi-jun CHU,Xi-zhuang SHAN. Drag reduction of a square⁃back Ahmed model based on bi⁃stable wake [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1635-1644. |
| [7] | Zhe SHEN,Yi-gang WANG,Zhi-gang YANG,Yin-zhi HE. Drift error correction of unknown sound source in wind tunnel using approximation method [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1584-1589. |
| [8] | Zhao LIU,Jiang-lin CHENG,Yu-tian ZHU,Li-hui ZHENG. Vertical vibration modeling and motion correlation analysis of rail vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1600-1607. |
| [9] | Fei GAO,Yang XIAO,Wen-hua ZHANG,Jin-xuan QI,Zi-qiao LI,Xiao-yuan MA. Influence of coupling of elevated temperature and state of charge on mechanical response of Li⁃ion battery cells [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1574-1583. |
| [10] | Jing LI,Qiu-jun SHI,Liang HONG,Peng LIU. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1545-1555. |
| [11] | Chang-qing DU,Xi-liang CAO,Biao HE,Wei-qun REN. Parameters optimization of dual clutch transmission based on hybrid particle swarm optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1556-1564. |
| [12] | Yin-ping LI,Tian-xu JIN,Li LIU. Design and dynamic characteristic simulation of pantograph⁃catenary continuous energy system for pure electric LHD [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 454-463. |
| [13] | Chen-guang LAI,Qing-yu WANG,Bo HU,Kai-ping WEN,Yan-yu CHEN. Design and optimization of a car empennage with winglet under effect of static aeroelasticity [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 399-407. |
| [14] | Hui YE,Chang LIU,Kang-kang YAN. Application of fiber reinforced composite in auto⁃body panel [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 417-425. |
| [15] | Xin CHEN,Ning WANG,Chuan-liang SHEN,Xiao FENG,Chang-hai YANG. Effect of rearview mirror modeling on aerodynamic noise of front window [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 426-436. |
|
||