Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (5): 1545-1555.doi: 10.13229/j.cnki.jdxbgxb20190535
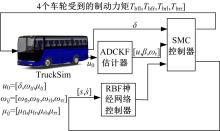
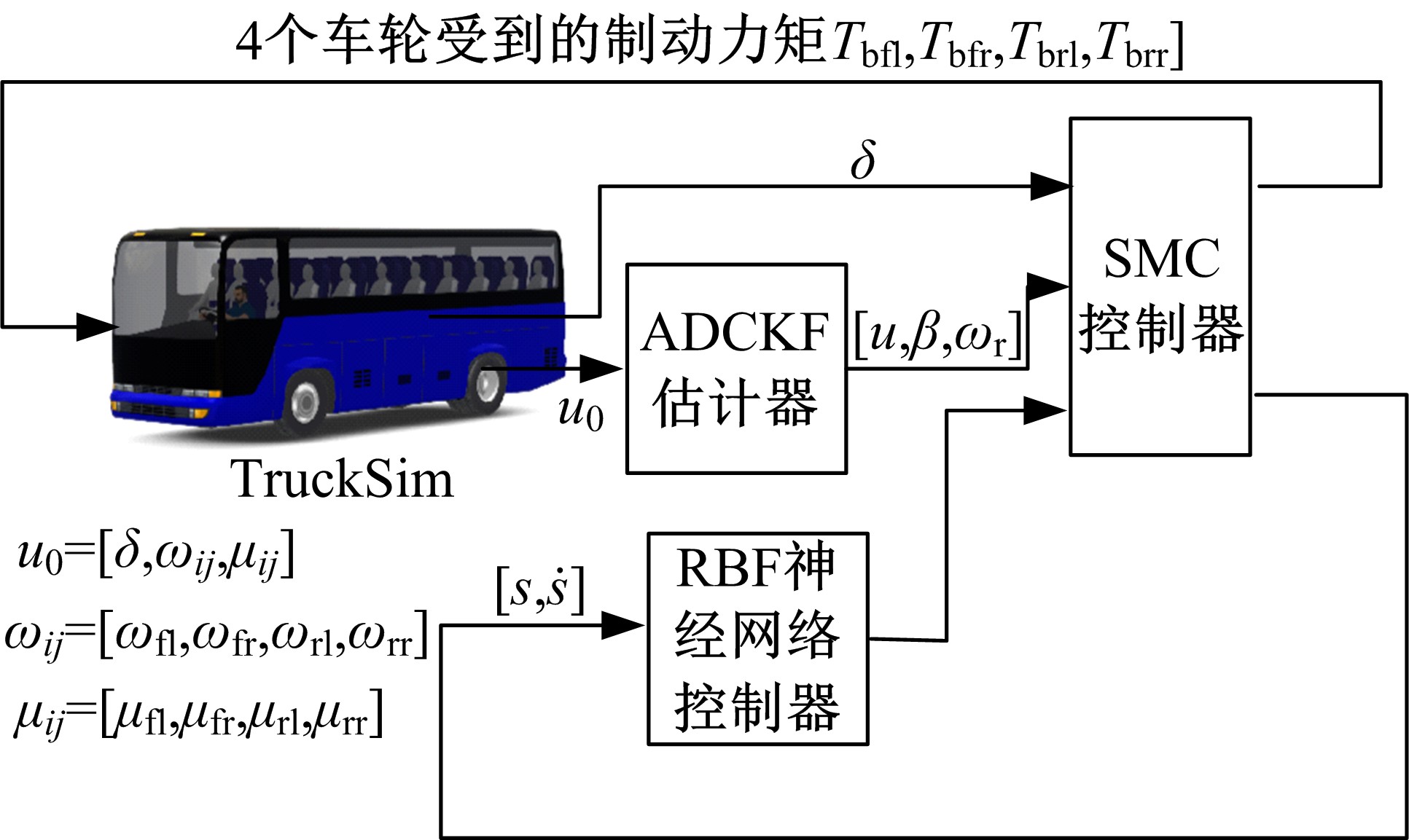
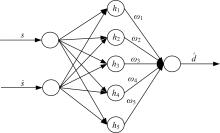
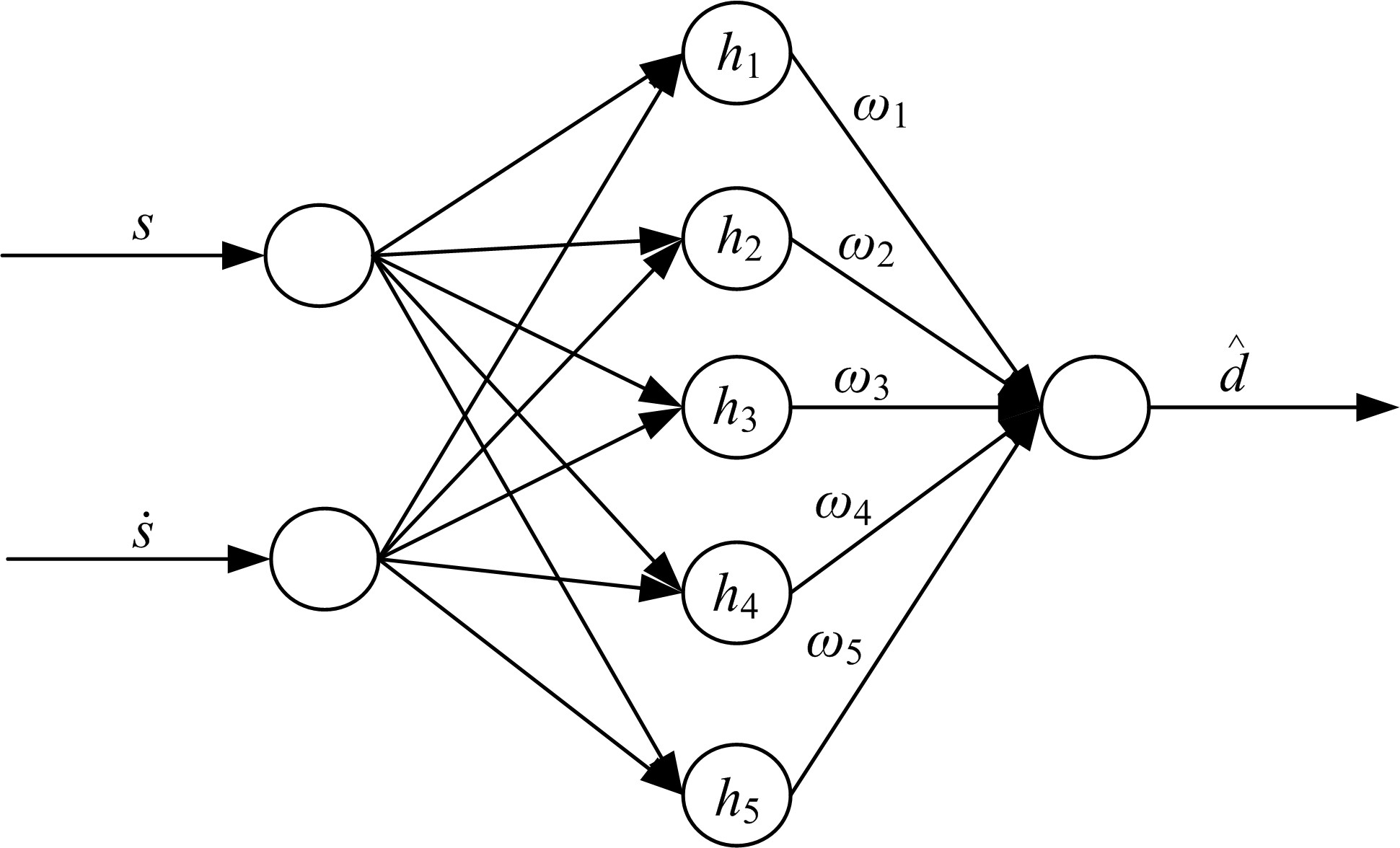
Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation
Jing LI1( ),Qiu-jun SHI1,Liang HONG2,Peng LIU1
),Qiu-jun SHI1,Liang HONG2,Peng LIU1
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Commercial Vehicle Development Institute, FAW Jiefang Automotive CO. LTD. , Changchun 130011, China
CLC Number:
- U461.6





| 1 | Antonov S, Fehn A, Kugi A. Unscented Kalman filter for vehicle state estimation[J]. Vehicle System Dynamics, 2011, 49(9): 1497-1520. |
| 2 | Reif K, Renner K, Saeger M. Using the unscented Kalman filter and a non-linear two-track model for vehicle state estimation[J]. Ifac Proceedings Volumes, 2008, 41(2): 8570-8575. |
| 3 | 宋传学, 肖峰, 刘思含, 等. 基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测[J]. 吉林大学学报: 工学版, 2016, 46(2): 333-339. |
| Song Chuan-xue, Xiao Feng, Liu Si-han, et al. State estimation of electric vehicle with in-wheel motors based on UKF[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(2): 333-339. | |
| 4 | 田彦涛, 张宇, 王晓玉, 等. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报: 工学版, 2018, 48(5): 845-852. |
| Tian Yan-tao, Zhang Yu, Wang Xiao-yu, et al. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman fliter algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 845-852. | |
| 5 | 张家旭, 李静. 采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计[J]. 西安交通大学学报, 2016, 50(3): 68-75. |
| Zhang Jia-xu, Li Jing. Estimation of vehicle speed and tire-road adhesion coefficient by adaptive unscented Kalman filter[J]. Journal of Xi’an Jiaotong University, 2016, 50(3): 68-75. | |
| 6 | 金贤建, 殷国栋, 陈南, 等. 分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测[J]. 东南大学学报: 自然科学版, 2016, 46(5): 992-996. |
| Jin Xian-jian, Yin Guo-dong, Chen Nan, et al. State observation of distributed drive electric vehicle using square root cubature Kalman filter[J]. Journal of Southeast University(Natural Science Edition), 2016, 46(5): 992-996. | |
| 7 | 李静, 石求军, 刘鹏, 等. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1017-1025. |
| Li Jing, Shi Qiu-jun, Liu Peng, et al. Neural network sliding mode control of commercial vehicle ABS based on longitudinal vehicle speed estimation[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1017-1025. | |
| 8 | 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12): 111-115. |
| Zhang Zhao-you, Hao Yan-ling, Wu Xu. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technology, 2013, 45(12): 111-115. | |
| 9 | 唐李军. Cubature卡尔曼滤波及其在导航中的应用研究[D]. 哈尔滨: 哈尔滨工程大学自动化学院, 2012. |
| Tang Li-jun. Cubature Kalman filter and application research on navigation[D]. Harbin: College of Automation, Harbin Engineering University, 2012. | |
| 10 | 金辉, 李世杰. 基于极限车速的车辆稳定性控制研究[J]. 汽车工程, 2018, 40(1): 48-56. |
| Jin Hui, Li Shi-jie. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018, 40(1): 48-56. | |
| 11 | 李寿涛, 马用学, 郭鹏程, 等. 一种变逻辑门限值的车辆稳定性控制策略研究[J]. 汽车工程, 2015, 37(7): 782-787. |
| Li Shou-tao, Ma Yong-xue, Guo Peng-cheng, et al. A study on vehicle stability control strategy with variable threshold[J]. Automotive Engineering, 2015, 37(7): 782-787. | |
| 12 | Chen Y H, Hedrick J K, Guo K H. A novel direct yaw moment controller for in-wheel motor electric vehicles[J]. Vehicle System Dynamics, 2013, 51(6): 925-942. |
| 13 | 周磊, 张向文. 基于Dugoff轮胎模型的爆胎车辆运动学仿真[J]. 计算机仿真, 2012, 29(6): 308-311. |
| Zhou Lei, Zhang Xiang-wen. Simulation of vehicle dynamics in tire blow-out process based on Dugoff tire model[J]. Computer Simulation, 2012, 29(6): 308-311. | |
| 14 | 张汉国, 张洪钺. 阻止自适应Kalman滤波发散的补救方法[J]. 控制与决策, 1991, 6(1): 53-56. |
| Zhang Han-guo, Zhang Hong-yue. Remedy to prevent adaptive Kalman filter divergence[J]. Control and Decision, 1991, 6(1): 53-56. | |
| 15 | Ding S H, Liu L, Zhang W X. Sliding mode direct yaw-moment control design for in-wheel electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6752-6762. |
| 16 | 刘金坤. 滑模变结构控制MATLAB仿真(第3版)基本理论与设计方法[M]. 北京: 清华大学出版社, 2015. |
| [1] | Chen-guang LAI,Qing-yu WANG,Bo HU,Kai-ping WEN,Yan-yu CHEN. Design and optimization of a car empennage with winglet under effect of static aeroelasticity [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 399-407. |
| [2] | Hui YE,Chang LIU,Kang-kang YAN. Application of fiber reinforced composite in auto⁃body panel [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 417-425. |
| [3] | Dan-tong OUYANG,Cong MA,Jing-pei LEI,Sha-sha FENG. Knowledge graph embedding with adaptive sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 685-691. |
| [4] | Yin-ping LI,Tian-xu JIN,Li LIU. Design and dynamic characteristic simulation of pantograph⁃catenary continuous energy system for pure electric LHD [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 454-463. |
| [5] | Xin CHEN,Ning WANG,Chuan-liang SHEN,Xiao FENG,Chang-hai YANG. Effect of rearview mirror modeling on aerodynamic noise of front window [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 426-436. |
| [6] | Yan MA,Jian-fei HUANG,Hai-yan ZHAO. Method of vehicle formation control based on vehicle to vehicle communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 711-718. |
| [7] | Xiao-yu LI,Nan XU,Tao QIU,Kong-hui GUO. Influence of anisotropic stiffness on tire mechanical properties and vehicle handling characteristics under combined slip situations [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 389-398. |
| [8] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [9] | Wen-ku SHI,Long CHEN,Gui-hui ZHANG,Zhi-yong CHEN. Modeling and tests for torsional characteristics of multi-stage stiffness dual mass flywheel torsional dampers [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 44-52. |
| [10] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [11] | Kong-hui GUO,Shi-qing HUANG,Hai-dong WU. In⁃plane dynamic tire model for high⁃frequency excitation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 19-28. |
| [12] | Zhe WANG,Yi XIE,Peng-fei ZANG,Yao WANG. Energy management strategy of fuel cell bus based on Pontryagin′s minimum principle [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 36-43. |
| [13] | Bo-xin WANG,Hai-tao YANG,Qing WANG,Xin GAO,Xiao-xu CHEN. Bridge vibration signal optimization filtering method based on improved CEEMD⁃multi⁃scale permutation entropy analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 216-226. |
| [14] | Fang-wu MA,Hong-yu LIANG,Ying ZHAO,Meng YANG,Yong-feng PU. Multi⁃objective crashworthiness optimization design of concave triangles cell structure with negative Poisson′s ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 29-35. |
| [15] | Fang-wu MA,Li-wei NI,Liang WU,Jia-hong NIE,Guang-jian XU. Position and attitude closed loop control of wheel⁃leggedall terrain mobile robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1745-1755. |
|
||