Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (12): 2816-2826.doi: 10.13229/j.cnki.jdxbgxb20211448
Previous Articles Next Articles
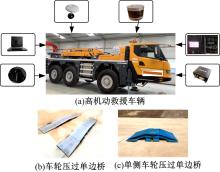
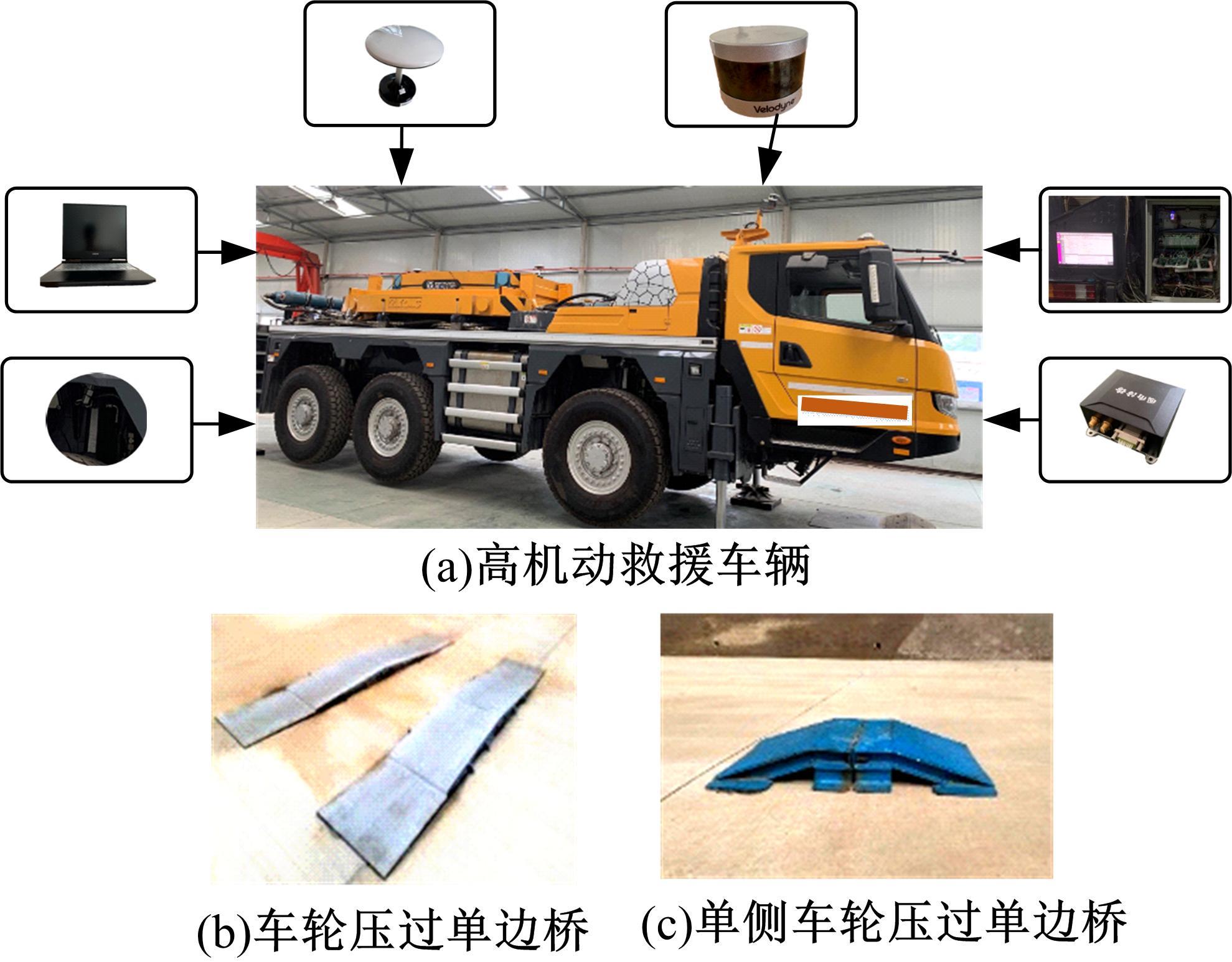
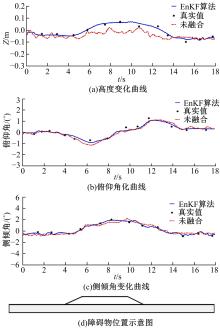
Active suspension control method of high mobility rescue vehicle based on ensemble Kalman filter
Wen-hang LI1( ),Tao NI2,Ding-xuan ZHAO2(),Pan-hong ZHANG2,Xiao-bo SHI2
),Tao NI2,Ding-xuan ZHAO2(),Pan-hong ZHANG2,Xiao-bo SHI2
- 1.College of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
2.School of Vehicle and Energy,Yanshan University,Qinhuangdao 066004,China
CLC Number:
- TP273


| 1 | 高路路, 马飞, 周志鸿, 等. 应急救援车辆产品概况[J]. 凿岩机械气动工具, 2017(1):52-61. |
| Gao Lu-lu, Ma Fei, Zhou Zhi-hong, et al. Products overview of emergency rescue vehicle[J]. Rock Drilling Machinery & Pneumatic Tools, 2017(1): 52-61. | |
| 2 | 刘清河,和题,刘燕宁. 抢险救援车技术现状分析及展望[J]. 中国应急救援,2010(5):16-17. |
| Liu Qin-he, He Ti, Liu Yan-ning. Analysis and prospect of rescue vehicle technology[J]. China Emergency Rescue, 2010(5):16-17. | |
| 3 | Xia Yuan-qing, Xu Ying-wei, Pu Fan, et al. Active disturbance rejection control for active suspension system of tracked vehicles[C]∥2016 IEEE International Conference on Industrial Technology, Taipei, C h i n a , 2016:No.16035629. |
| 4 | Waghmare D B, Asutkar V G, Patre B M. Extended disturbance observer based robust sliding mode control for active suspension system[J]. International Journal of Dynamics and Control, 2021, 9:1681-1694. |
| 5 | Pan Hui-hui, Sun Wei-chao, Gao Hui-jun, et al. Nonlinear tracking control based on extended state observer for vehicle active suspensions with performance constraints[J]. Mechatronics, 2015, 30: 363-370. |
| 6 | Sun W C, Gao H J, Kaynak O. Finite frequency H∞ control for vehicle active suspension systems[J]. IEEE Transactions on Control Systems Technology, 2011, 19(2): 416-422. |
| 7 | Yamashita M, Fujimori K, Hayakawa K, et al. Application of H∞ control to active suspension systems[J]. IFAC Proceedings Volumes, 1993, 26(2): 87-90. |
| 8 | Liu Lei, Li Xiang-sheng, Liu Yan-jun, et al. Neural network based adaptive event trigger control for a class of electromagnetic suspension systems[J]. Control Engineering Practice, 2021, 106: No.104675. |
| 9 | Ding Fei, Li Qian-long, Jiang Chao, et al. Event-triggered control for nonlinear leaf spring hydraulic actuator suspension system with valve predictive management[J]. Information Sciences, 2021, 551: 184-204. |
| 10 | Zhao F, Ge S, Tu F W, et al. Adaptive neural network control for active suspension system with actuator saturation[J]. IET Control Theory & Applications, 2016, 10(14): 1696-1705. |
| 11 | Huang Ying-bo, Na Jing, Wu Xing, et al. Adaptive control of nonlinear uncertain active suspension systems with prescribed performance[J]. ISA Transactions, 2015, 54:145-155. |
| 12 | Maleki N, Sedigh A K, Labibi B. Robust model reference adaptive control of active suspension system[C]∥2006 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 2006: No.9189170. |
| 13 | 李宇昊,赵又群. 基于双层控制策略的四轮独立转向无人驾驶汽车路径跟踪[J]. 江苏大学学报:自然科学版, 2022,43(4): 386-393. |
| Li Yu-hao, Zhao You-qun. Path tracking of 4WIS autonomous vehicle based on double layer control strategy[J]. Journal of Jiangsu University(Natural Science Edition), 2022,43(4): 386-393. | |
| 14 | 姚雪莲,丁东东,杨艺,等. 汽车驾驶机器人的自适应执行器故障补偿控制设计[J]. 江苏大学学报:自然科学版,2021, 42(6): 642-647. |
| Yao Xue-lian, Ding Dong-dong, Yang Yi, et al. Failure compensation control design of adaptive actuator for vehicle robot driver[J]. Journal of Jiangsu University(Natural Science Edition), 2021, 42(6): 642-647. | |
| 15 | Bender E K. Optimum linear preview control with application to vehicle suspension[J]. J Basic Eng, 1968,90(2):213-221. |
| 16 | Iwata Y, Nakano M. Optimum preview control of vehicle air suspension[J]. Bull Jpn Soc Mech Eng, 1976,19(138):1485-1489. |
| 17 | Iwata Y, Nakano M. Optimal preview control of vehicle suspension[J]. Bull Jpn Soc Mech Eng, 1976, 19(129): 265-273. |
| 18 | Oraby W A H, Aly M A, El-Demerdash S M, et al. Influence of active suspension preview control on the vehicle lateral dynamics[C]∥SAE Technology Paper, 2007-01-2347. |
| 19 | Youn I, Tchamna R, Lee S H, et al. Preview suspension control for a full tracked vehicle[J]. International Journal of Automotive Technology, 2014, 15: 399-410. |
| 20 | Göhrle C, Schindler A. Road profile estimation and preview control for low band width active suspension systems[J]. IEEE/ASME Trans on Mechatronics, 2015, 20: 2299-2310. |
| 21 | Theunissen J, Sorniotti A, Gruber P. Regionless explicit model predictive control of active suspension systems with preview[J]. IEEE Transaction on Industrial Electronics, 2020, 67, 4877-4888. |
| 22 | Lee K T, Dai M J, Chuang C C. Temperature-compensated model for lithium-ion polymer batteries with extended Kalman filter state-of-charge estimation for an implantable charger[J]. IEEE Trans Ind Electron, 65(1): 589-596. |
| 23 | Fan R, Liu Y, Huang R, et al. Precise fault location on transmission lines using ensemble Kalman filter[J]. IEEE Trans Power Deliv, 33(6): 3252-3255. |
| 24 | Jiaolong Y, Hongdon L, Dylan C, et al. Go-ICP: a globally optimal solution to 3D ICP point-set registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(11): 2241-2254. |
| 25 | 姜晓通,戴宁,张长东,等. 基于“滑移”主方向自适应采样的ICP 算法优化研究[J]. 中国机械工程, 2014, 25(4): 497-502. |
| Jiang Xiao-tong, Dai Ning, Zhang Chang-dong, et al. Research on ICP algorithm optimization based on "slap" principal direction adaptive sampling[J]. China Mechanical Engineering, 2014, 25(4): 497-502. |
| [1] | Yun-feng HU,Tong YU,Hui-ce YANG,Yao SUN. Optimal control method of fuel cell start⁃up in low temperature environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2034-2043. |
| [2] | Wen-jing WU,Yong-bin ZHAN,Li-li YANG,Run-chao CHEN. Coordinated control method of variable speed limit in on⁃ramp area considering safety distance [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1315-1323. |
| [3] | Hao-nan PENG,Ming-huan TANG,Qi-wen ZHA,Wei-zhong WANG,Wei-da WANG,Chang-le XIANG,Yu-long LIU. Optimization⁃based lane changing trajectory planning approach for autonomous vehicles on two⁃lane road [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2852-2863. |
| [4] | Zhi-jun YANG,Zhong-yi GAO,Li-jun WANG,Guan-xin HUANG,Yu-tai WEI. Model predictive control algorithm for rigid⁃flexible coupling positioning stage [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2806-2815. |
| [5] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [6] | Chao JIA,Hong-ze XU,Long-sheng WANG. Nonlinear model predictive control for automatic train operation based on multi⁃point model [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1913-1922. |
| [7] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [8] | LI Jing, ZHANG Jia-xu. Integrated control of vehicle chassis system based on robust L2-L∞/H∞ method [J]. 吉林大学学报(工学版), 2016, 46(6): 1757-1764. |
| [9] | TANG Xiao-feng, GAO Feng, XU Guo-yan, DING Neng-gen, CAI Yao, LIU Jian-xing. Vehicle driving dynamics prediction based on highway intelligent space-vehicle framework theory [J]. 吉林大学学报(工学版), 2015, 45(5): 1395-1401. |
| [10] | XU Fang, JIN Wei-wei, CHEN Hong, ZHANG Zhen-wei. Hardware implementation method for model predictive control on a FPGA chip [J]. 吉林大学学报(工学版), 2014, 44(4): 1042-1050. |
| [11] | SHI Yi-ran, TIAN Yan-tao, SHI Hong-wei, ZHANG Li. Modified Volterra model based nonlinear model predicting control for air-fuel ratio of SI engines [J]. 吉林大学学报(工学版), 2014, 44(2): 538-547. |
| [12] | LI Gang, ZONG Chang-fu, CHEN Guo-ying, HONG Wei, HE Lei. Integrated control for X-by-wire electric vehicle with 4 independently driven in-wheel motors [J]. , 2012, 42(04): 796-802. |
| [13] | LI Gang, ZONG Chang-fu, JIANG Li-yong, LIANG He-qi, HONG Wei. Active front steering and direct yaw moment integrated control algorithm [J]. 吉林大学学报(工学版), 2011, 41(增刊2): 54-58. |
| [14] | YANG Jian-sen, GUO Kong-hui, DING Hai-tao, HAO Bao-qing, LI Fei. Vehicle integrated chassis control based on model predictive control [J]. 吉林大学学报(工学版), 2011, 41(增刊2): 1-5. |
| [15] | ZHANG Ju, DING Jing. Explicit model predictive control of DC-DC converters [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 270-274. |
|