Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (12): 2806-2815.doi: 10.13229/j.cnki.jdxbgxb20210479
Previous Articles Next Articles
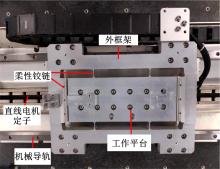
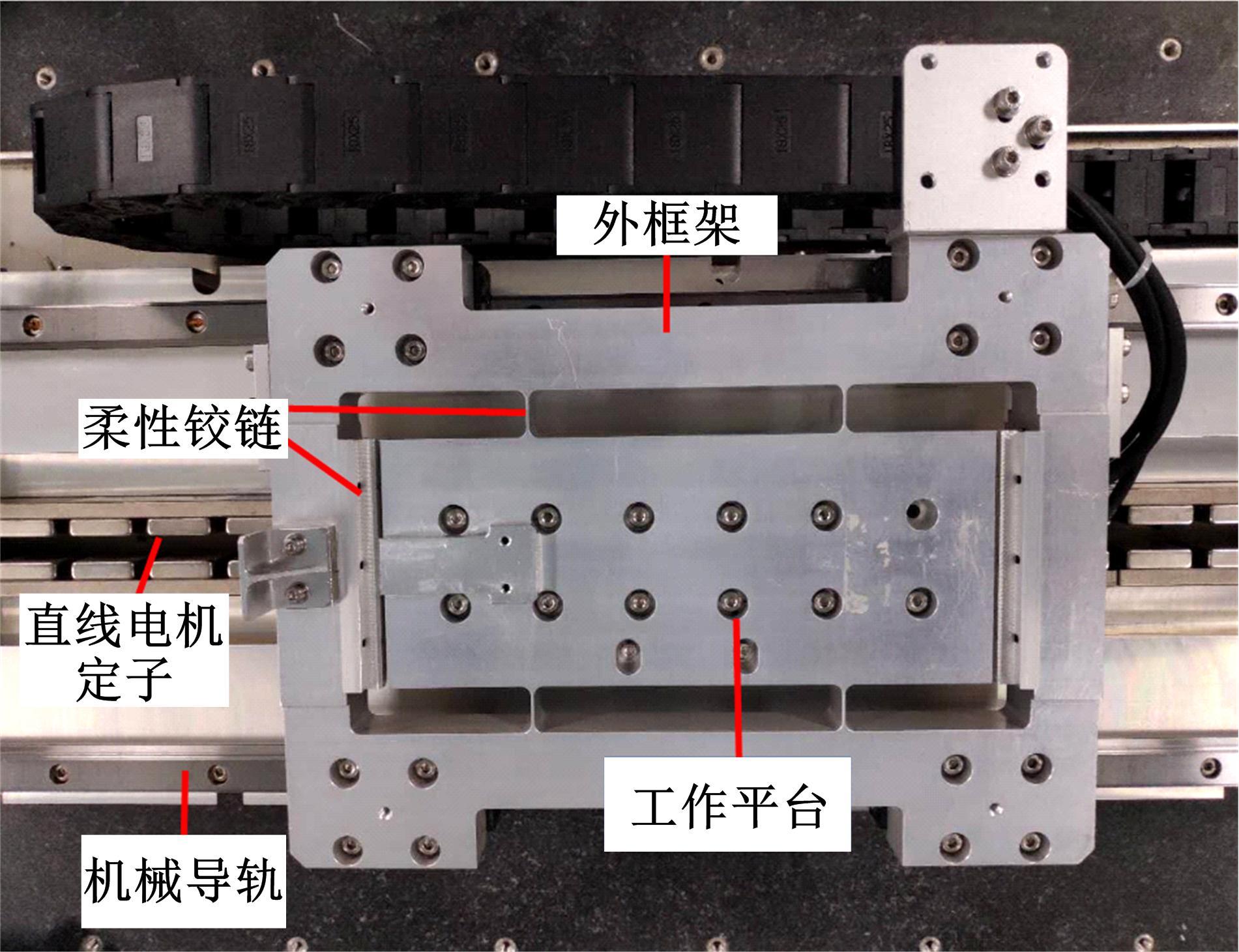
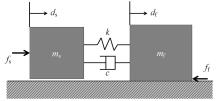
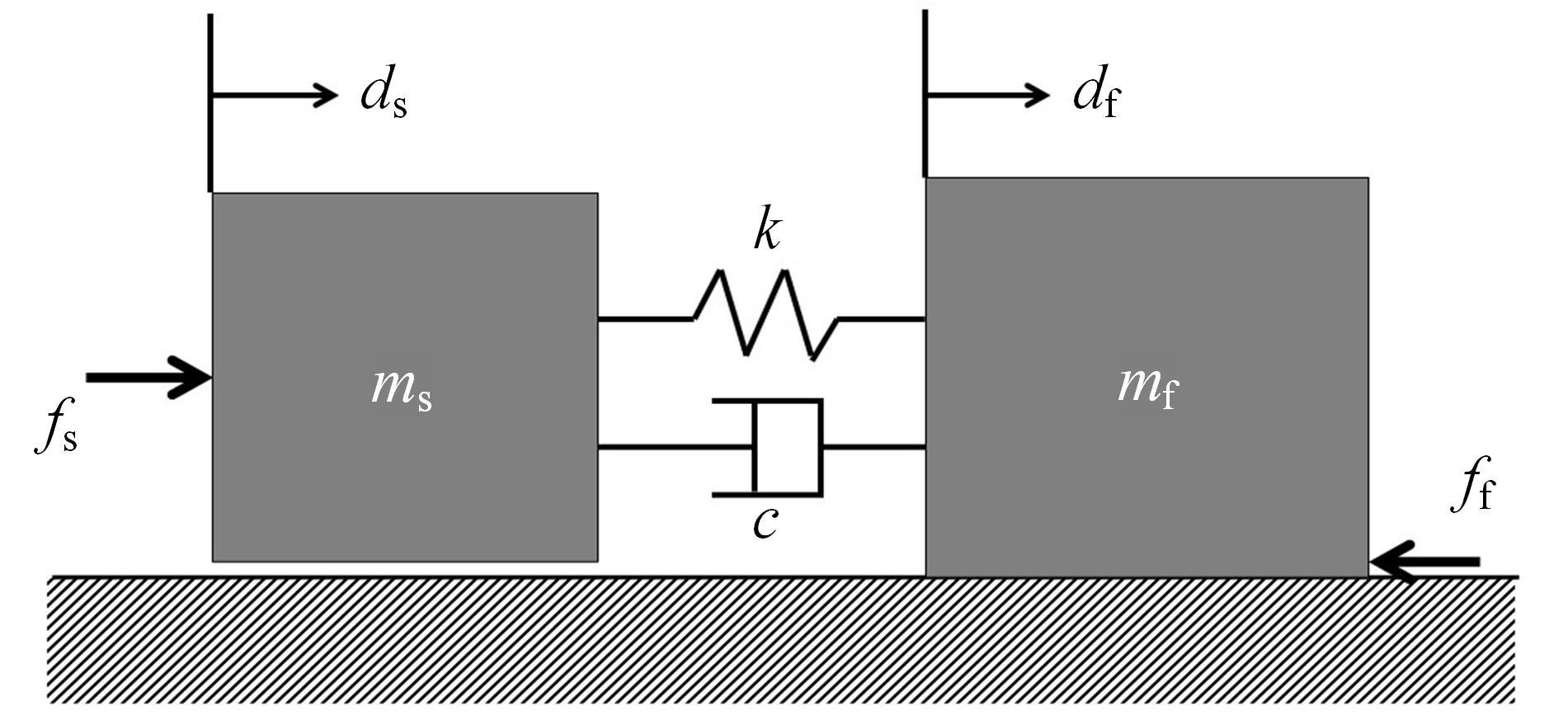
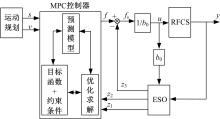
Model predictive control algorithm for rigid⁃flexible coupling positioning stage
Zhi-jun YANG1( ),Zhong-yi GAO1,Li-jun WANG2,Guan-xin HUANG1(),Yu-tai WEI1
),Zhong-yi GAO1,Li-jun WANG2,Guan-xin HUANG1(),Yu-tai WEI1
- 1.State Key Laboratory of Precision Electronic Manufacturing Technology and Equipment,Guangdong University of Technology,Guangzhou 510006,China
2.Key Laboratory of Industrial Process Knowledge Automation,Ministry of Education,University of Science and Technology Beijing,Beijing 100083,China
CLC Number:
- TP273


| 1 | 刘岗岗,王旭亮,胡锐,等. 面向多品种、小批量微电子制造过程的SPC技术应用研究[J]. 电子质量, 2020(1): 5-8. |
| Liu Gang-gang, Wang Xu-liang, Hu Rui, et al. SPC technology application research for multi-variety, small-batch microelectronics manufacturing process[J]. Electronic Quality, 2020(1): 5-8. | |
| 2 | Qin W, Li Y. Foreword: special section on "the reliability of advanced microelectronic packaging—part II: structure-property relationships"[J]. IEEE Transactions on Components, Packaging, and Manufacturing Technology, 2020, 10(10): 1587-1588. |
| 3 | 夏旭晖. 微电子封装技术的优势与应用[J]. 无线互联科技, 2021, 18(4): 102-103. |
| Xia Xu-hui. The advantages and applications of microelectronic packaging technology[J]. Wireless Internet Technology, 2021, 18(4): 102-103. | |
| 4 | 廖志伟. 微电子封装技术探讨[J]. 计算机产品与流通, 2020(2): 150. |
| Liao Zhi-wei. Discussion on microelectronics packaging technology[J]. Computer Products and Circulation, 2020(2): 150. | |
| 5 | 白有盾,陈新,杨志军. 刚柔分级并联驱动宏微复合运动平台设计[J]. 中国科学: 技术科学, 2019, 49(6): 669-680. |
| Bai You-dun, Chen Xin, Yang Zhi-jun. Design of rigid-flexible hierarchical parallel drive macro-micro composite motion platform[J]. Science in China: Technical Sciences, 2019, 49(6): 669-680. | |
| 6 | Chen X, Bai Y, Yang Z, et al. A precision-positioning method for a high-acceleration low-load mechanism based on optimal spatial and temporal distribution of inertial energy[J]. Engineering, 2015, 1(3): 391-398. |
| 7 | Ruderman M, Iwasaki M. Analysis of linear feedback position control in presence of presliding friction[J]. IEEJ Journal of Industry Applications, 2016, 5(2): 61-68. |
| 8 | Sato K, Nakamoto K, Shimokohbe A. Practical control of precision positioning mechanism with friction[J]. Precision Engineering, 2004, 28(4):426-434. |
| 9 | Dong X, Okwudire C E. An experimental investigation of the effects of the compliant joint method on feedback compensation of pre-sliding/pre-rolling friction[J]. Precision Engineering, 2018, 54:81-90. |
| 10 | 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002(3): 13-18. |
| Han Jing-qing. From PID technology to "auto-disturbance rejection control" technology[J]. Control Engineering, 2002(3): 13-18. | |
| 11 | 席裕庚,李德伟,林姝. 模型预测控制——现状与挑战[J]. 自动化学报, 2013, 39(3): 222-236. |
| Xi Yu-geng, Li De-wei, Lin Shu. Model predictive control——current situation and challenges[J]. Acta Automatica Sinica, 2013, 39(3): 222-236. | |
| 12 | Morari M, Maeder U. Nonlinear offset-free model predictive control[J]. Automatica Oxford, 2012,48(9): 2059-2067. |
| 13 | Narimani M, Wu B, Yaramasu V, et al. Finite control-set model predictive control (FCS-MPC) of nested neutral point-clamped (NNPC) converter[J]. IEEE Transactions on Power Electronics, 2015, 30(12): 7262-7269. |
| 14 | Guechi E H, Bouzoualegh S, Zennir Y, et al. MPC control and LQ optimal control of A two-link robot arm: a comparative study[J]. Machines, 2018, 6(3):No.37. |
| 15 | 杨茹楠,何晋伟,王秀瑞. 三电平双向直流变换器的模型预测电压控制研究[J]. 电源学报, 2021, 19(2): 74-80. |
| Yang Ru-nan, He Jin-wei, Wang Xiu-rui. Research on model predictive voltage control of three-level bidirectional DC converter[J]. Journal of Power Supply, 2021, 19(2): 74-80. | |
| 16 | Cursi F, Modugno V, Lanari L, et al. Bayesian neural network modeling and hierarchical MPC for a tendon-driven surgical robot with uncertainty minimization[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2642-2649. |
| 17 | 李寿涛,王蕊,徐靖淳,等. 一种基于模型预测复合控制的车辆避碰控制方法[J]. 吉林大学学报:工学版, 2021, 51(2): 738-746. |
| Li Shou-tao, Wang Rui, Xu Jing-chun, et al. A vehicle collision avoidance control method based on model predictive compound control[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 738-746. | |
| 18 | 黄一,韩京清. 非线性连续二阶扩张状态观测器的分析与设计[J]. 科学通报, 2000(13): 1373-1379. |
| Huang Yi, Han Jing-qing. Analysis and design of nonlinear continuous extended second order state observer[J]. Chinese Science Bulletin, 2000(13): 1373-1379. | |
| 19 | Han Jing-qing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 20 | 李静,韩佐悦,杨威,等. 基于非线性模型的磁流变半主动悬架驱动系统[J]. 吉林大学学报:工学版, 2018, 48(3): 645-651. |
| Li Jing, Han Zuo-yue, Yang Wei, et al. Magnetorheological semi-active suspension drive system based on nonlinear model[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(3): 645-651. | |
| 21 | 王春阳,辛瑞昊,史红伟. 针对大滞后系统的滞后时间削弱自抗扰控制方法[J]. 吉林大学学报: 工学版, 2017, 47(4): 1231-1237. |
| Wang Chun-yang, Xin Rui-hao, Shi Hong-wei. The lag time weakened auto disturbance rejection control method for the large lag system[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(4): 1231-1237. | |
| 22 | Yang Jun, Li Shi-hua, Yu Xing-huo. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 160-169. |
| 23 | Dinh T N, Park J, Park K S. Design and evaluation of disturbance observer algorithm for cable-driven parallel robots[J]. Microsystem Technologies, 2020, 26(1): 3377-3387. |
| 24 | Kim K S, Rew K H. Reduced order disturbance observer for discrete-time linear systems[J]. Automatica, 2013, 49(4): 968-975. |
| 25 | Tran T P, Yokokura Y, Ohishi K, et al. FPGA-based high performance bilateral control of different master-slave mechanism using highorder disturbance observer[C]∥IEEE International Conference on Mechatronics, Vicenza, Italy, 2013: No.13518547. |
| 26 | Ri S, Huang J, Tao C J, et al. A high-order disturbance observer based sliding mode velocity control of mobile wheeled inverted pendulum systems[C]∥2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 2016: No. 16341068. |
| 27 | 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998(1): 19-23. |
| Han Jing-qing. Auto disturbance rejection controller and its application[J]. Control and Decision, 1998(1): 19-23. | |
| 28 | 黄一,薛文超,赵春哲. 自抗扰控制纵横谈[J]. 系统科学与数学, 2011, 31(9): 1111-1129. |
| Huang Yi, Xue Wen-chao, Zhao Chun-zhe. Discussion on active disturbance rejection control[J]. System Science and Mathematics, 2011, 31(9): 1111-1129. | |
| 29 | Gao Zhi-qiang. Scaling and bandwidth-parameterization based controller tuning[J]. Proceedings of the 2003 American Control Conference: IEEE, 2003: 4989-4996. |
| 30 | Daafouz J, Riedinger P, Iung C. Stability analysis and control synthesis for switched systems: a switched Lyapunov function approach[J]. IEEE Transactions on Automatic Control, 2002, 47(11): 1883-1887. |
| 31 | Grimm G, Messina M J, Tuna S E, et al. Model predictive control: for want of a local control Lyapunov function, all is not lost[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 546-558. |
| 32 | Singhose W, Eloundou R, Lawrence J. Command generation for flexible systems by input shaping and command smoothing[J]. Journal of Guidance Control & Dynamics, 2012, 33(6): 1697-1707. |
| [1] | Yun-feng HU,Tong YU,Hui-ce YANG,Yao SUN. Optimal control method of fuel cell start⁃up in low temperature environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2034-2043. |
| [2] | Lin JIANG,Ling ZHOU,Hui ZHAO. Design and stiffness continuously adjustable analysis of hydraulic servo flexible drive mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1499-1508. |
| [3] | Wen-jing WU,Yong-bin ZHAN,Li-li YANG,Run-chao CHEN. Coordinated control method of variable speed limit in on⁃ramp area considering safety distance [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1315-1323. |
| [4] | Wen-hang LI,Tao NI,Ding-xuan ZHAO,Pan-hong ZHANG,Xiao-bo SHI. Active suspension control method of high mobility rescue vehicle based on ensemble Kalman filter [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2816-2826. |
| [5] | Hao-nan PENG,Ming-huan TANG,Qi-wen ZHA,Wei-zhong WANG,Wei-da WANG,Chang-le XIANG,Yu-long LIU. Optimization⁃based lane changing trajectory planning approach for autonomous vehicles on two⁃lane road [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2852-2863. |
| [6] | Peng HU,Jian-xin ZHU,Chang-sheng LIU,Da-qing ZHANG. Characteristics of boom potential energy alternate recovery and utilization system of hydraulic excavator [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2256-2264. |
| [7] | Xue-yong LI,Zhong-qiu ZHAO,Chun-song ZHANG,Chang-hou LU. Finite element based calculation method of human⁃robot interaction force [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1612-1619. |
| [8] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [9] | Ping YU,Te MU,Li-hui ZHU,Zi-ye ZHOU,Jie SONG. Nonlinear dynamic analysis and stability control of drilling tool conveying mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 820-830. |
| [10] | Ming-wei HU,Hong-guang WANG,Xin-an PAN. Global structural optimization design of collaborative robots using orthogonal design [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 370-378. |
| [11] | Chao JIA,Hong-ze XU,Long-sheng WANG. Nonlinear model predictive control for automatic train operation based on multi⁃point model [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1913-1922. |
| [12] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [13] | GU Wan-li, ZHANG Sen, HU Yun-feng, CHEN Hong. Nonlinear controller design of brushed DC motor [J]. 吉林大学学报(工学版), 2017, 47(3): 900-907. |
| [14] | TANG Xiao-feng, GAO Feng, XU Guo-yan, DING Neng-gen, CAI Yao, LIU Jian-xing. Vehicle driving dynamics prediction based on highway intelligent space-vehicle framework theory [J]. 吉林大学学报(工学版), 2015, 45(5): 1395-1401. |
| [15] | LI Xian-tao, ZHANG Bao,ZHAO Chun-lei,SUN Jing-hui, MAO Da-peng, SHEN Hong-hai. Improve isolation degree based on adaptive active disturbance rejection controller [J]. 吉林大学学报(工学版), 2015, 45(1): 202-208. |
|