Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (3): 883-890.doi: 10.13229/j.cnki.jdxbgxb20221313
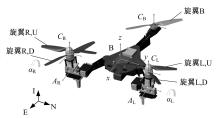
Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle
Long-long CHEN1,2( ),Tian-yu FENG1,2,Zong-yang LYU1,3(),Yu-hu WU1,2
),Tian-yu FENG1,2,Zong-yang LYU1,3(),Yu-hu WU1,2
- 1.Key Laboratory of Intelligent Control and Optimization for Industrial Equipment,Ministry of Education,Dalian University of Technology,Dalian 116024,China
2.School of Control Science and Engineering,Dalian University of Technology,Dalian 116024,China
3.School of Communications and Information Engineering,Dalian University of Technology,Dalian 116024,China
CLC Number:
- V279
| 1 | Ryan A, Hedrick J K. A mode-switching path planner for UAV-assisted search and rescue[C]∥Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 2005: 1471-1476. |
| 2 | Rego B S, Raffo G V. Suspended load path tracking control based on zonotopic state estimation using a tilt-rotor UAV[C]∥2016 IEEE 19th International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 1445-1451. |
| 3 | 陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报:工学版, 2016, 46(5): 1439-1446. |
| Chen Qiang, Xu Hong-guo, Tan Li-dong. Surveying method of traffic accident scene based on SUAV photogrammetry[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1439-1446. | |
| 4 | Papachristos C, Tzes A. Modeling and control simulation of an unmanned tilt tri-rotor aerial vehicle[C]∥2012 IEEE International Conference on Industrial Technology, Athens, Greece, 2012: 840-845. |
| 5 | Liu Z, He Y, Yang L, et al. Control techniques of tilt rotor unmanned aerial vehicle systems: a review[J]. Chinese Journal of Aeronautics, 2017, 30(1): 135-148. |
| 6 | Parham T. V-22 pilot-in-the-loop aeroelastic stability analysis[C]∥47th Annual Forum, Phoenix, AZ, 1991: 1307-1319. |
| 7 | Song Yan-guo, Wang Huan-jin. Design of flight control system for a small unmanned tilt rotor aircraft[J]. Chinese Journal of Aeronautics, 2009, 22(3): 250-256. |
| 8 | Ta D A, Fantoni I, Lozano R. Modeling and control of a tilt tri-rotor airplane[C]∥2012 American control conference (ACC), Montreal, QC, Canada, 2012: 131-136. |
| 9 | Xian B, Hao W. Nonlinear robust fault-tolerant control of the tilt trirotor UAV under rear servo's stuck fault: theory and experiments[J]. IEEE Transactions on Industrial Informatics, 2018, 15(4): 2158-2166. |
| 10 | Wang Zhi-gang, Zhao Hong, Duan Deng-yan, et al. Application of improved active disturbance rejection control algorithm in tilt quad rotor[J]. Chinese Journal of Aeronautics, 2020, 33(6): 1625-1641. |
| 11 | Kastelan D, Konz M, Rudolph J. Fully actuated tricopter with pilot-supporting control[J]. IFAC-PapersOnLine, 2015, 48(9): 79-84. |
| 12 | Gertler J. V-22 osprey tilt-rotor aircraft: background and issues for congress[C]∥Library of Congress Washington DC Congressional Research Service, Washington, USA, 2009: 1-57. |
| 13 | Fonte F, Favale M, Quaranta G, et al. Enhanced gust load recovery for the AW609 tiltrotor[C]∥45th European Rotorcraft Forum, Warsaw, Poland, 2019: 1-13. |
| 14 | 佚名. 中国航天空气动力技术研究院多款彩虹无人机亮相航展[J]. 军民两用技术与产品, 2021(10): 14-15. |
| Anonymous. Multiple CH UAVs of China aerospace aerodynamics research institute appeared in the air show[J]. Dual Use Technologies & Products, 2021(10): 14-15. | |
| 15 | Franchi A, Carli R, Bicego D, et al. Full-pose tracking control for aerial robotic systems with laterally bounded input force[J]. IEEE Transactions on Robotics, 2018, 34(2): 534-541. |
| 16 | Li F, Xu W, Shi Y, et al. Multi-body dynamic modeling, simulation and control strategy design of a Y6 tilt rotor UAV[C]∥2017 2nd International Conference on Advanced Robotics and Mechatronics, Hefei and Tai'an, China, 2017: 373-379. |
| 17 | Cardoso D N, Raffo G V, Esteban S. A robust adaptive mixing control for improved forward flight of a tilt-rotor UAV[C]∥2016 IEEE 19th International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 1432-1437. |
| 18 | Cetinsoy E, Dikyar S, Hançer C, et al. Design and construction of a novel quad tilt-wing UAV[J]. Mechatronics, 2012, 22(6): 723-745. |
| 19 | Invernizzi D, Giurato M, Gattazzo P, et al. Comparison of control methods for trajectory tracking in fully actuated unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2020, 29(3): 1147-1160. |
| 20 | Ta D A, Fantoni I, Lozano R. Modeling and control of a tilt tri-rotor airplane[C]∥Proceedings of the American Control Conference, Montreal, QC, Canada, 2012: 131-136. |
| 21 | Cardoso D N, Esteban S, Raffo G V. A nonlinear W ∞ controller of a tilt-rotor UAV for trajectory tracking[C]∥18th European Control Conference, Naples, Italy, 2019: 928-934. |
| 22 | Chen L, Lv Z, Shen X, et al. Adaptive attitude control for a coaxial tilt-rotor UAV via immersion and invariance methodology[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1710-1713. |
| 23 | Amato F, Ariola M, Carbone M, et al. Finite-time Control of Linear Systems: A Survey[M]. Birkhäuser Boston: Springer Verlag, 2006: 195-213. |
| 24 | Hong Y, Huang J, Xu Y. On an output feedback finite-time stabilization problem[J]. IEEE Transactions on Automatic Control, 2001, 46(2): 305-309. |
| 25 | Yu S, Yu X, Shirinzadeh B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. |
| 26 | Pan H, Sun W. Nonlinear output feedback finite-time control for vehicle active suspension systems[J]. IEEE Transactions on Industrial Informatics, 2018, 15(4): 2073-2082. |
| 27 | Wang N, Karimi H R, Li H, et al. Accurate trajectory tracking of disturbed surface vehicles: a finite-time control approach[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1064-1074. |
| 28 | Lv Z Y, Wu Y, Zhao Q, et al. Design and control of a novel coaxial tilt-rotor UAV[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 3810-3821. |
| 29 | Featherstone R, Orin D. Robot dynamics: equations and algorithms[C]∥IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 2000: 826-834. |
| 30 | Zuo Z, Han Q L, Ning B. Fixed-time Cooperative Control of Multi-agent Systems[M]. Cham, Switzerland: Springer International Publishing, 2019. |
| 31 | Cole K, Wickenheiser A M. Reactive trajectory generation for multiple vehicles in unknown environments with wind disturbances[J]. IEEE Transactions on Robotics, 2018, 34(5): 1333-1348. |
| 32 | Million E. The hadamard product[J]. Course Notes, 2007, 3(6): 1-7. |
| [1] | Ya-jing YU,Jian GUO,Rong-hao WANG,Wei QIN,Ming-wu SONG,Zheng-rong XIANG. Time⁃varying formation control of multi⁃quadrotor unmanned aerial vehicles based on state observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 871-882. |
| [2] | Guo-yuan QI,Kuo LI,Kun WANG. Attitude constrained control of quadrotor unmanned aerial vehicle based on compensation function observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 853-862. |
| [3] | Hong-yan GUO,Wen-ya YU,Jun LIU,Qi-kun DAI. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 693-703. |
| [4] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [5] | Zhuo-jun XU,Yao-xiang WANG,Xing HUANG,Cheng PENG. Ground moving target search and location with multi⁃unmanned aerial vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 832-840. |
| [6] | De-feng HE,Dan ZHOU,Jie LUO. Efficient cooperative predictive control of predecessor⁃following vehicle platoons with guaranteed string stability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 726-734. |
| [7] | Guo-yuan QI,Hao CHEN. Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 810-822. |
| [8] | Hong-yang PAN,Zhao LIU,Bo YANG,Geng SUN,Yan-heng LIU. Overview of swarm intelligence methods for unmanned aerial vehicle systems based on new⁃generation information technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 629-642. |
| [9] | Bin XIAN,Jie-qi LI,Xun GU. Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1926-1933. |
| [10] | Ang LI,Hong-yuan YANG,Xiao-meng LEI,Kai-wen SONG,Cheng-hui QIAN. Closed-loop control of traveling attitude of hexapod robot based on equivalent connecting link model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1696-1708. |
| [11] | Hang ZHU,Han-bo YU,Jia-hui LIANG,Hong-ze LI. Improved algorithm of UAV search based on electric field model and simulation analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 3029-3038. |
| [12] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [13] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
| [14] | Hong-zhi WANG,Ting-ting WANG,Huang-shui HU,Xiao-fan LU. PID control based on BP neural network optimized by Q⁃learning for speed control of BLDCM [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2280-2286. |
| [15] | Yan MA,Jian-fei HUANG,Hai-yan ZHAO. Method of vehicle formation control based on vehicle to vehicle communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 711-718. |
|
||