Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (2): 356-364.doi: 10.13229/j.cnki.jdxbgxb.20221184
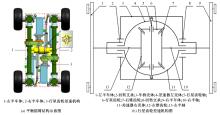
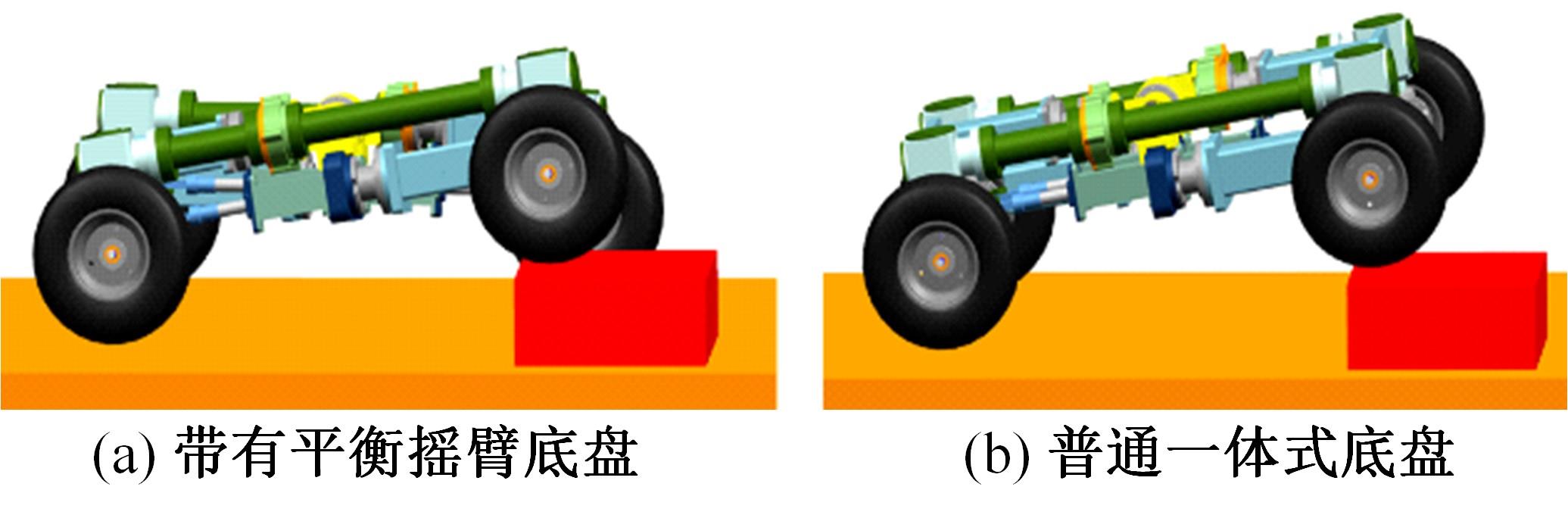
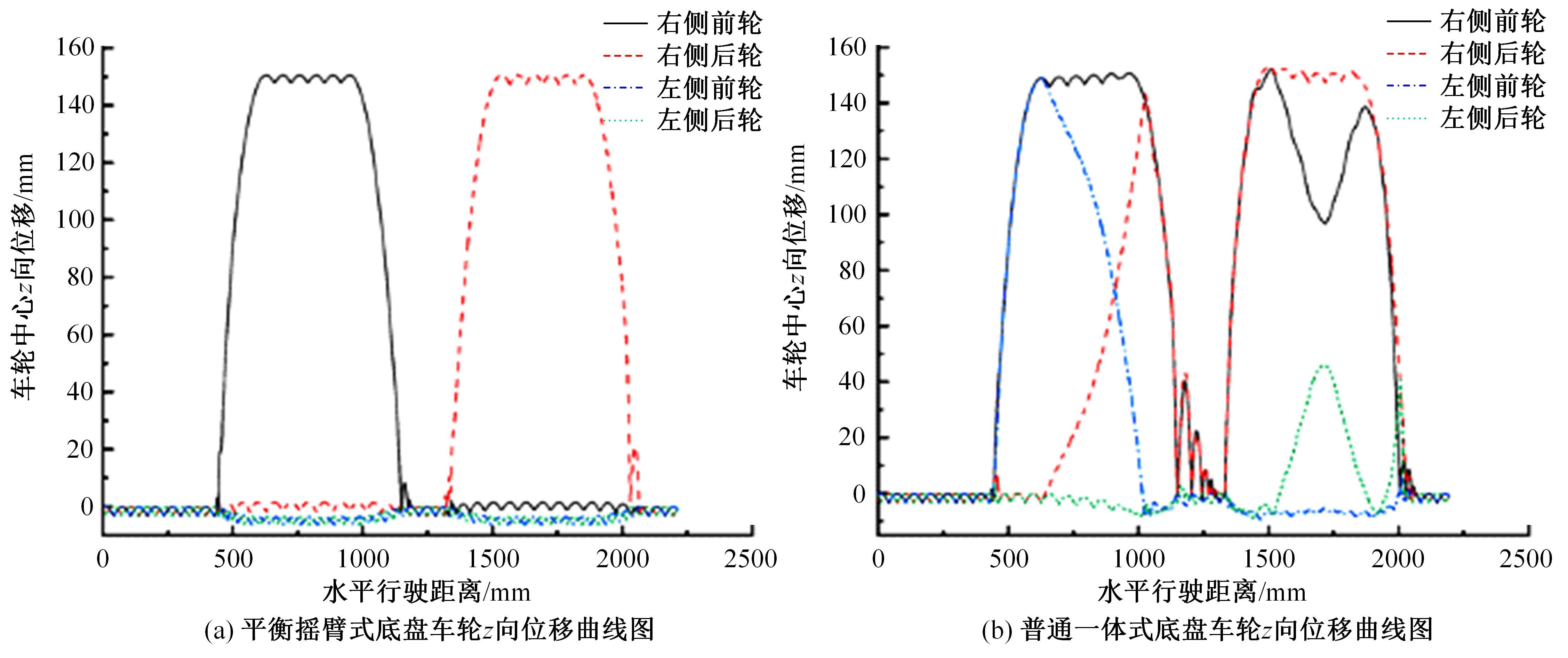
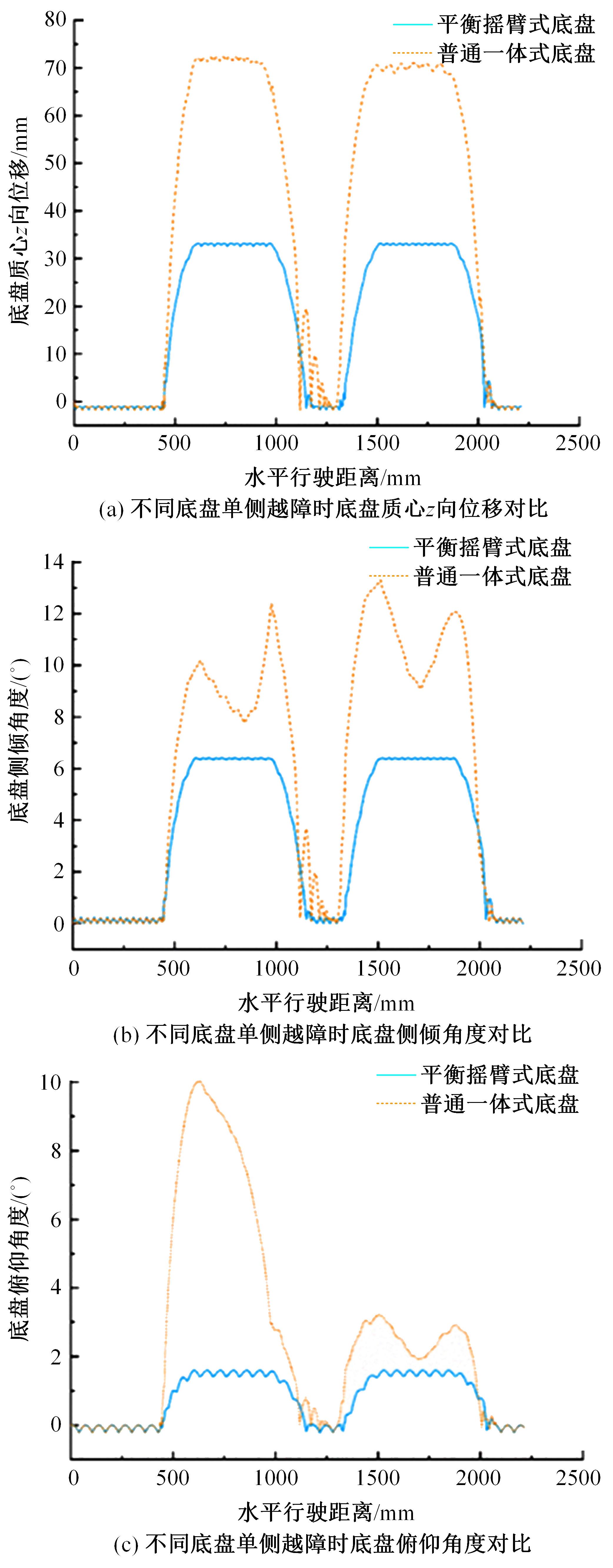
Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot
Jian-jun NIE1( ),Jun-kai HOU1,Xiao-lin XIE2,Hong-zhen YAN1
),Jun-kai HOU1,Xiao-lin XIE2,Hong-zhen YAN1
- 1.School of Mechatronics Engineering,Zhongyuan University of Technology,Zhengzhou 450007,China
2.College of Agricultural Equipment Engineering,Henan University of Science and Technology,Luoyang 471003,China
CLC Number:
- TP242.2



| 1 | 王燕, 索寒生, 贾贵金. 石化危险事故搜救移动机器人SLAM问题研究[J]. 控制工程, 2018, 25(2): 346-351. |
| Wang Yan, Suo Han-sheng, Jia Gui-jin. Research on SLAM problem of search and rescue mobile robot for petrochemical dangerous accidents[J]. Control Engineering, 2018, 25(2): 346-351. | |
| 2 | 李军伟, 朱宇昌, 张树生, 等. 输油场站巡检机器人系统及软件设计[J]. 制造业自动化, 2019, 41(2): 97-100. |
| Li Jun-wei, Zhu Yu-chang, Zhang Shu-sheng, et al. Robot system and software design for oil station inspection[J]. Manufacturing Automation, 2019, 41(2): 97-100. | |
| 3 | 童枭军, 陈洋, 路浩, 等. 面向表计读数的变电站巡检机器人路径规划[J]. 电子测量与仪器学报, 2022, 36(8): 167-177. |
| Tong Xiao-jun, Chen Yang, Lu Hao, et al. Path planning of substation inspection robot for meter reading[J]. Journal of Electronic Measurement and Instruments, 2022, 36(8): 167-177. | |
| 4 | Xiao Y, Yan Y, Yu Y S, et al. Research on pose adaptive correction method of indoor rail mounted inspection robot in GIS Substation[J]. Energy Reports, 2022, 8(6): 696-705. |
| 5 | 鲁守银, 张营, 李建祥, 等. 移动机器人在高压变电站中的应用[J]. 高电压技术, 2017, 43(1): 276-284. |
| Lu Shou-yin, Zhang Ying, Li Jian-xiang, et al. Application of mobile robots in high-voltage substations[J]. High Voltage Technology, 2017, 43(1): 276-284. | |
| 6 | 汪鹏. 变电站巡检机器人系统结构设计与控制研究[D].合肥: 安徽大学电气工程与自动化学院, 2020. |
| Wang Peng. Research on structure design and control of substation inspection robot system[D]. Hefei: School of Electrical Engineering and Automation, Anhui University, 2020. | |
| 7 | 李战东, 陶建国, 罗阳, 等. 核电水池推力附着机器人系统设计[J]. 吉林大学学报: 工学版, 2018, 48(6): 1820-1826. |
| Li Zhan-dong, Tao Jian-guo, Luo Yang, et al. Design of a nuclear power pool thrust-attached robot system[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 48(6): 1820-1826. | |
| 8 | Jing G Q, Qin X Y, Wang H Y, et al. Developments, challenges, and perspectives of railway inspection robots[J]. Automation in Construction, 2022, 138: 104242-104266. |
| 9 | 杨智勇, 吴功平, 王伟, 等. 高压巡检机器人下坡节能控速方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 567-576. |
| Yang Zhi-yong, Wu Gong-ping, Wang Wei, et al. Downhill energy saving speed control method for high voltage inspection robot[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(2): 567-576. | |
| 10 | 房立金, 祝帅, 贺长林, 等. 新型四臂巡检机器人结构设计及转向越障研究[J]. 东北大学学报: 自然科学版, 2019, 40(6): 825-830. |
| Fang Li-jin, Zhu Shuai, He Chang-lin, et al. Structural design of a new type of four-arm inspection robot and research on steering obstacle clearance[J]. Journal of Northeastern University (Natural Science Edition), 2019, 40(6): 825-830. | |
| 11 | 裴文良, 张树生, 李军伟. 矿用巡检机器人设计及其应用[J]. 制造业自动化, 2017, 39(2): 73-74. |
| Pei Wen-liang, Zhang Shu-sheng, Li Jun-wei. Design and application of mine inspection robot[J]. Manufacturing Automation, 2017, 39(2): 73-74. | |
| 12 | 王成军, 王智慧. 井下巡检机器人浮动式移动底盘设计与分析[J]. 机床与液压, 2022, 50(15): 25-30. |
| Wang Cheng-jun, Wang Zhi-hui. Design and analysis of floating mobile chassis of underground inspection robot[J]. Machine Tools and Hydraulics, 2022, 50(15): 25-30. | |
| 13 | 阴贺生, 张秋菊, 宁萌. 轮腿复合式变位越障机器人结构构型与典型运动过程分析[J]. 机械传动, 2017, 41(12): 1-6. |
| Yin He-sheng, Zhang Qiu-ju, Ning Meng. Structural configuration and typical motion process analysis of wheel-leg compound displacement obstacle crossing robot [J]. Mechanical Transmission, 2017, 41(12): 1-6. | |
| 14 | 李荣, 栾贻青, 王海鹏, 等. 全向四驱变电站巡检机器人运动控制系统设计[J]. 机床与液压, 2020, 48(8): 112-116. |
| Li Rong, Luan Yi-qing, Wang Hai-peng, et al. Design of motion control system for omnidirectional four-wheel drive substation inspection robot[J]. Machine Tool and Hydraulics, 2020, 48(8): 112-116. | |
| 15 | 芮宏斌, 张森, 闫修鹏, 等. 全轮转向移动底盘设计及运动控制研究[J]. 机械科学与技术, 2022, 41(9): 1352-1361. |
| Rui Hong-bin, Zhang Sen, Yan Xiu-peng, et al. Research on design and motion control of all-wheel steering mobile chassis[J]. Mechanical Science and Technology, 2022, 41(9): 1352-1361. | |
| 16 | 姜涛, 葛少伟, 李德泉, 等. 电缆隧道巡检机器人行走机构的仿真研究[J]. 自动化与仪器仪表, 2018(12): 68-71. |
| Jiang Tao, Ge Shao-wei, Li De-quan, et al. Simulation research on the walking mechanism of the cable tunnel inspection robot[J]. Automation and Instrumentation, 2018(12): 68-71. | |
| 17 | 王鹏, 聂建军, 解晓琳, 等. 纯滚动轮式移动机器人设计及运动控制研究[J]. 机械传动, 2022, 46(8): 85-92. |
| Wang Peng, Nie Jian-jun, Xie Xiao-lin, et al. Research on the design and motion control of a pure rolling wheeled mobile robot[J]. Mechanical Transmission, 2022, 46(8): 85-92. |
| [1] | Xiao-lin DENG,Fu-mo YANG,Shan-gan QIN. Comparative analysis on crashworthiness of a novel bamboo⁃like hexagonal gradient hierarchical multicellular tube [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 333-345. |
| [2] | Yi-gang WANG,Yu-peng WANG,Hao ZHANG,Si-an ZHAO. Identification and analysis of aerodynamic noise sources in the bogie area of high⁃speed trains [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 346-355. |
| [3] | Xu-dong LI,Xin-yu WANG,Cheng TIAN,Xin-feng ZHANG,Zhi-hui NIU,Zhi-qiang ZHAO. Compiling vehicle durability load spectrum based on customer usage correlation [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 66-75. |
| [4] | Tie WANG,Xu-dong LI,Cheng TIAN,Hong-wei ZHAO. Building biaxial fatigue damage model of wheel rims based on multi-axial loads projection theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 99-104. |
| [5] | Zhao-wei CHEN,Qian-hua PU. Suppression characteristics of vehicle⁃bridge coupling vibration of long⁃span cable⁃stayed bridge with resilient wheels [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2519-2532. |
| [6] | Ping-yi LIU,Xiao-ting LI,Ruo-lin GAO,Hai-tao LI,Wen-jun WEI,Ya WANG. Design and experiment of tilt-driving mechanism for the vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2185-2192. |
| [7] | Xue-jin HUANG,Jin-xing ZHONG,Jing-yu LU,Ji ZHAO,Wei XIAO,Xin-mei YUAN. Electric vehicle charging load forecasting method based on user portrait [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2193-2200. |
| [8] | Shu-pei ZHANG,Ming-yue XIA,Wei ZHANG,Zhao CHEN,Yi-xiang CHEN. Impact dynamic modeling and simulation for ball joint with clearance considering nonlinear stiffness [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2227-2235. |
| [9] | Hui CHEN,Ya-jun SHAO. Measurement method of pavement surface spectrum with multi⁃sensor coupling based on inertial benchmark [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2254-2262. |
| [10] | Lei CHEN,Yang WANG,Zhi-sheng DONG,Ya-qi SONG. A vehicle agility control strategy based on steering intent [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1257-1263. |
| [11] | Xin CHEN,Guan-chen ZHANG,Kang-ming ZHAO,Jia-ning WANG,Li-fei YANG,De-rong SITU. Influence of lap welds on the lightweight design of welded aluminum structures [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1282-1288. |
| [12] | Yong ZHANG,Feng-zhao MAO,Shui-chang LIU,Qing-yu WANG,Shen-gong PAN,Guang-sheng ZENG. Optimization on distortion grid of vehicle external flow field based on Laplacian Algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1289-1296. |
| [13] | Shao-hua WANG,Kun CHU,De-hua SHI,Chun-fang YIN,Chun LI. Robust compound coordinated control of HEV based on finite⁃time extended state observation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1272-1281. |
| [14] | Yan-li YIN,Xue-jiang HUANG,Xiao-liang PAN,Li-tuan WANG,Sen ZHAN,Xin-xin ZHANG. Hierarchical control of hybrid electric vehicle platooning based on PID and Q⁃Learning algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1481-1489. |
| [15] | Gui-shen YU,Xin CHEN,Zi-tao WU,Yi-xiong CHEN,Guan-chen ZHANG. Analysis of microstructure and mechanical properties of probeless friction stir spot welding joint in AA6061⁃T6 aluminum thin plate [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1338-1344. |
|
||