Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (10): 2752-2760.doi: 10.13229/j.cnki.jdxbgxb.20211358
Previous Articles Next Articles
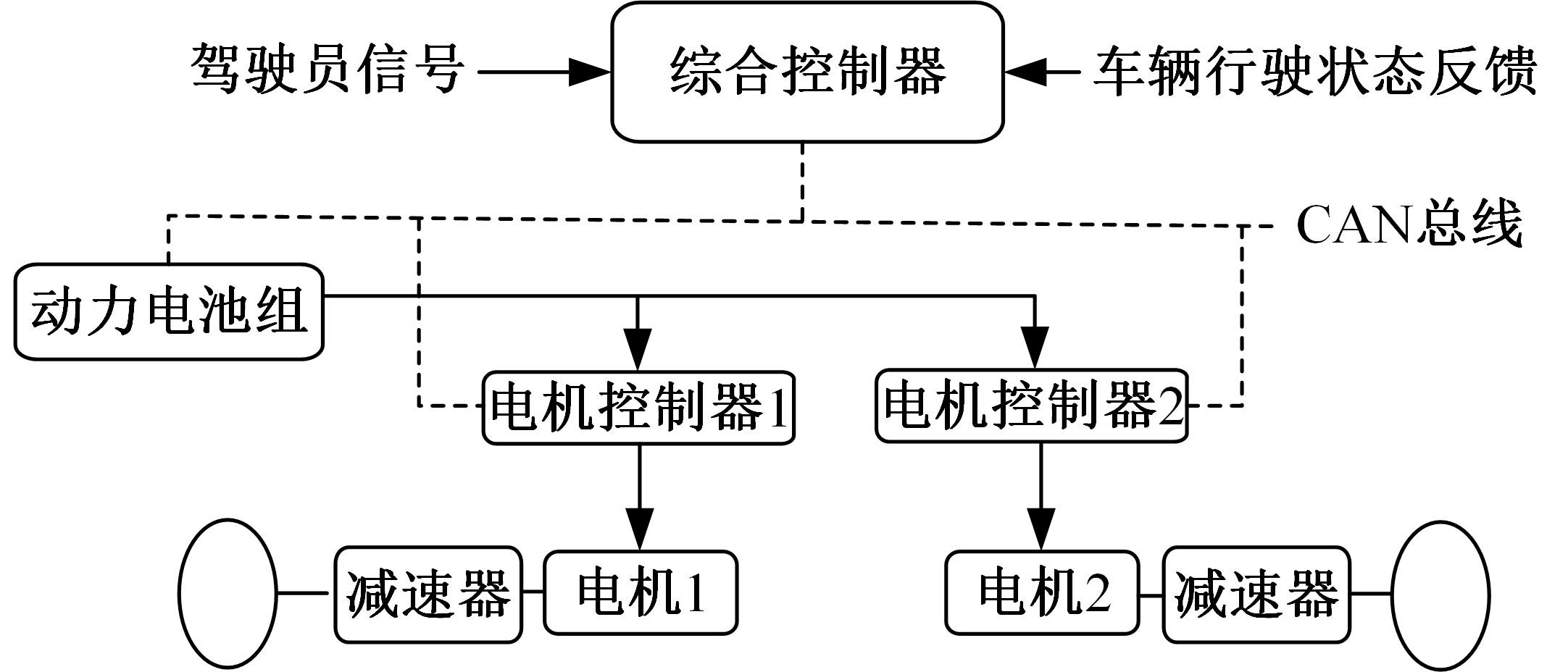
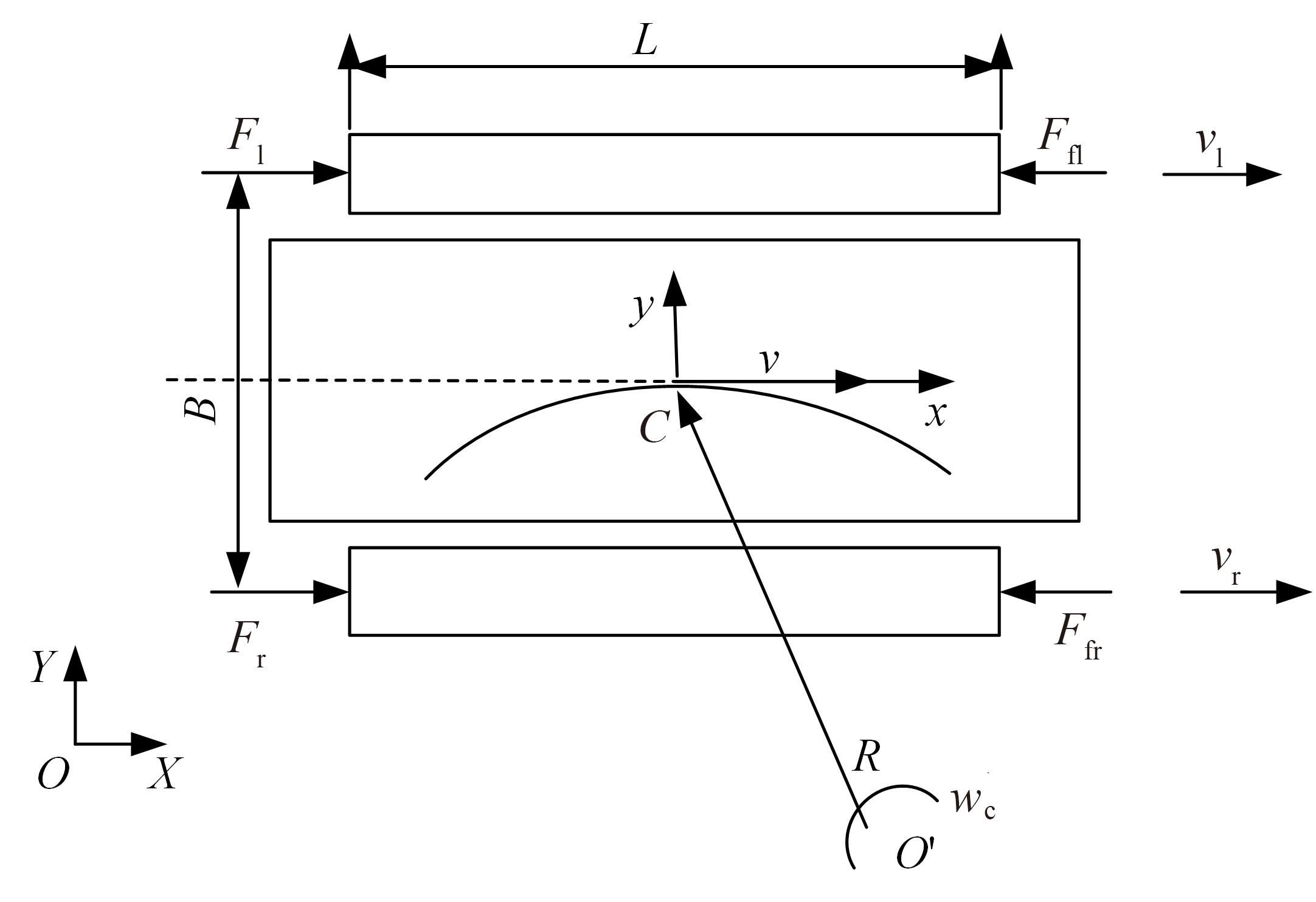
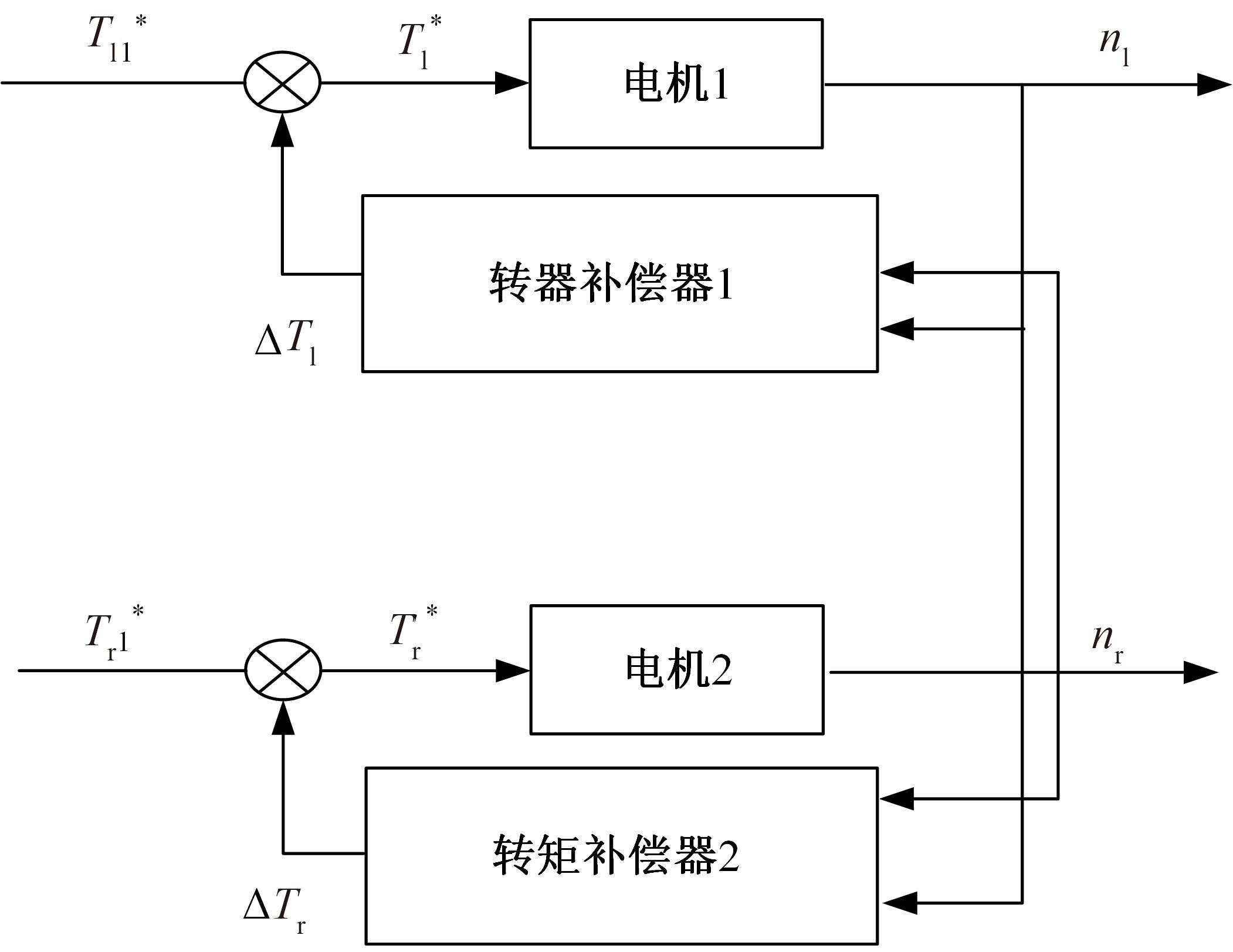
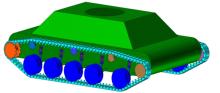
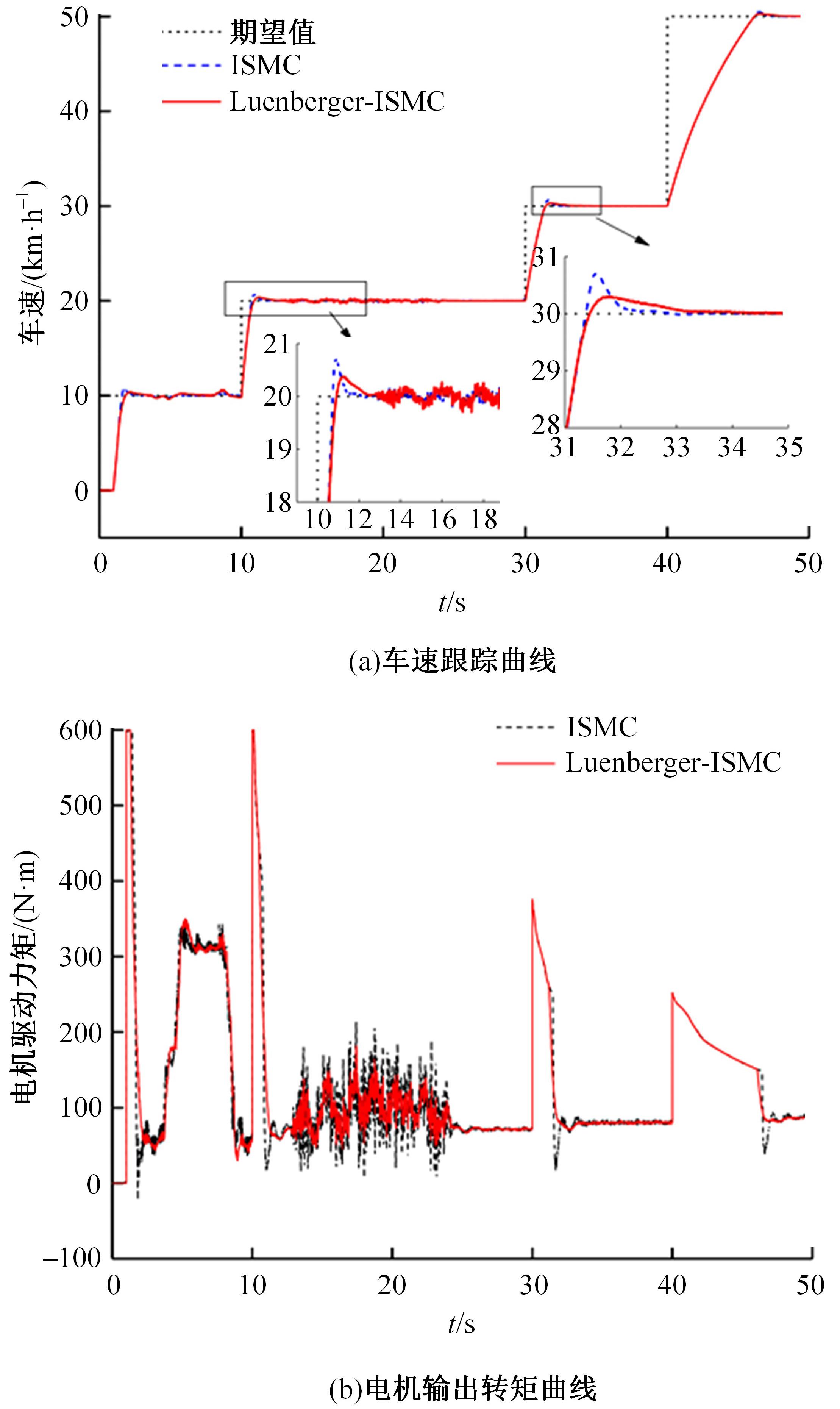
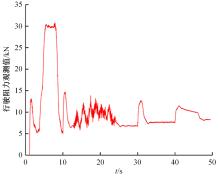
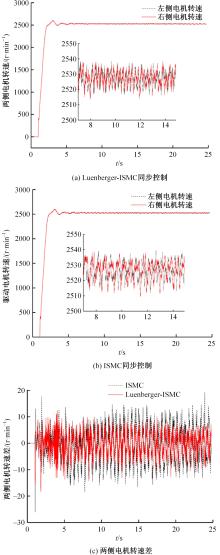
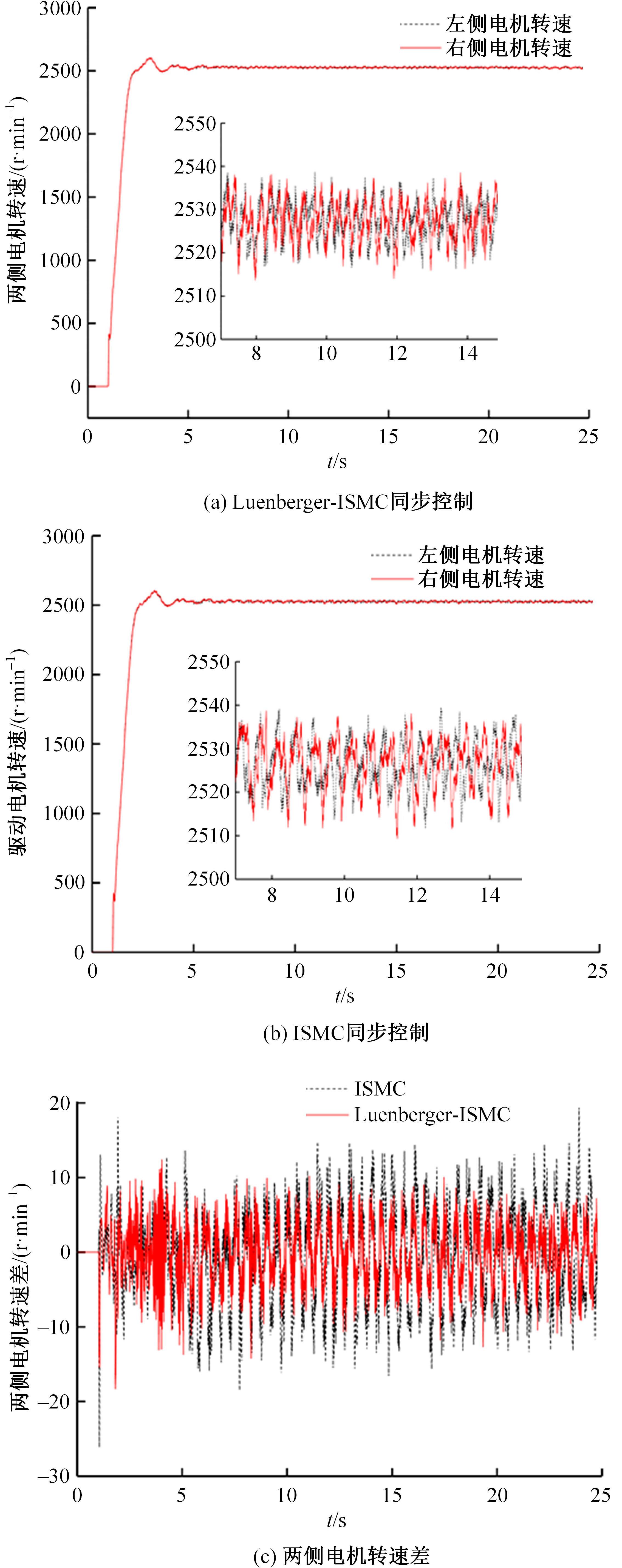
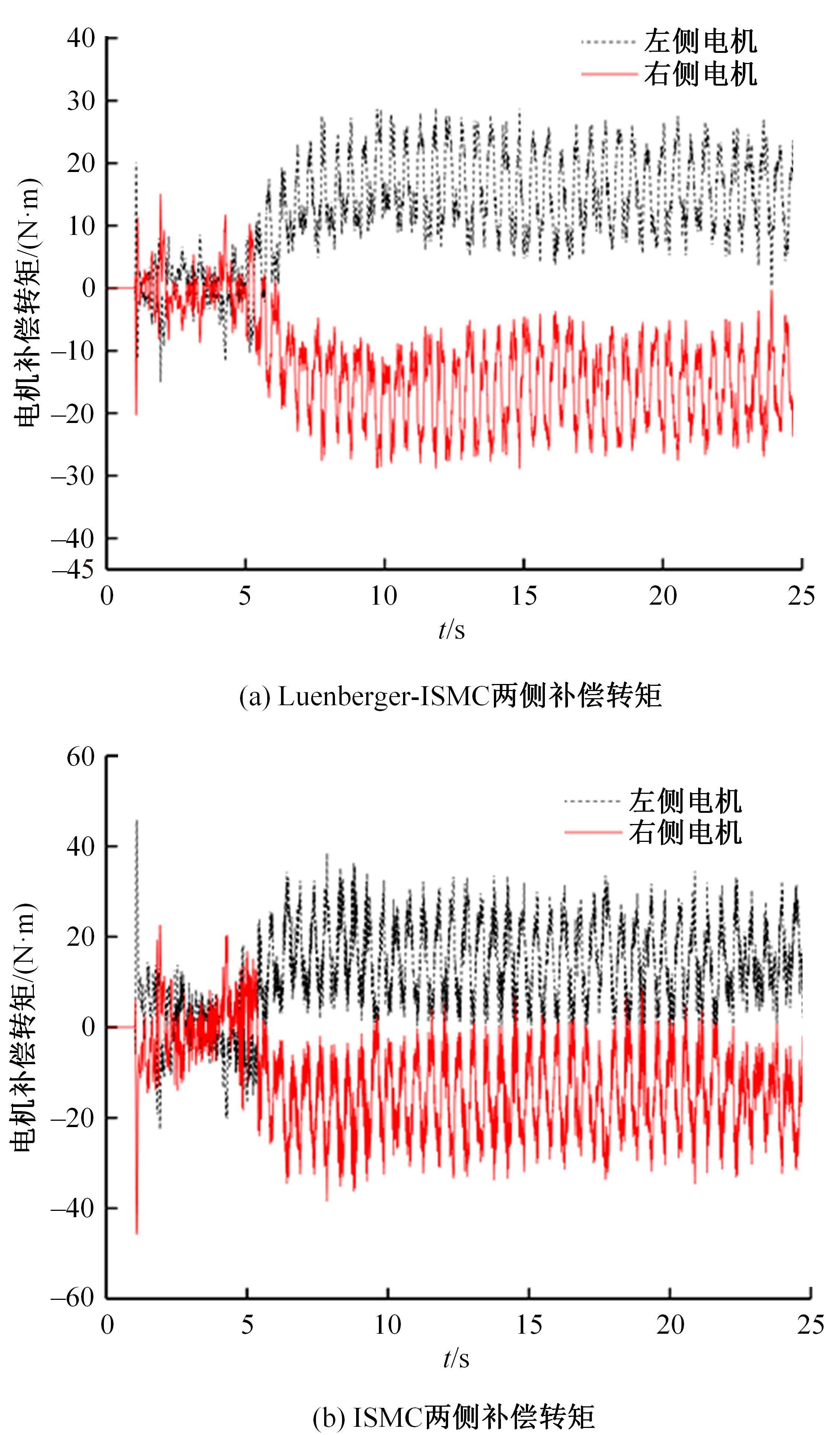
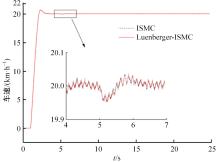
Straight driving stability hierarchical control for dual-motor driving electric tracked vehicle
Bing CHEN1( ),Kai-xuan MA1,Yang LIU1,Jiang REN1,Chen-xi ZHANG2,Tao-shuo ZHAO2
),Kai-xuan MA1,Yang LIU1,Jiang REN1,Chen-xi ZHANG2,Tao-shuo ZHAO2
- 1.School of Mechanical Engineering,University of Science and Technology Beijing,Beijing 100083,China
2.China North Vehicle Research Institute,Beijing 100072,China
CLC Number:
- U469.694









| 1 | 邹渊,胡晓松.地面车辆混合驱动系统建模与控制优化[M]. 北京:北京理工大学出版社,2015:240-245. |
| 2 | Randive V, Subramanian S C, Thondiyath A. Component sizing of single and dual drive series hybrid electric powertrain for military tracked vehicles[C]∥IEEE Vehicle Power and Propulsion Conference, Wuhan,China,2019: 1-6. |
| 3 | Sivakumar P, Reginald R, Viswanath G,et al. Configuration study of hybrid electric power pack for tracked combat vehicles[J]. Defence Science Journal,2017,67(4): 354-364. |
| 4 | 马晓军,苏建强,魏曙光,等. 双侧电驱动装甲车辆直驶转矩补偿控制[J]. 兵工学报,2013,34(11): 1373-1379. |
| Ma Xiao-jun, Su Jian-qiang, Wei Shu-guang,et al. Torque compensate control of dual-motor electric drive armored vehicle[J]. Acta Armamentarii,2013,34(11): 1373-1379. | |
| 5 | 李春明,盖江涛,袁艺,等. 履带车辆双电机耦合驱动系统同步特性[J]. 兵工学报,2020,41(10): 1930-1938. |
| Li Chun-ming, Gai Jiang-tao, Yuan Yi,et al. Synchronization characteristics of dual-motor coupled driving system of tracked vehicle[J]. Acta Armamentarii,2020,41(10):1930-1938. | |
| 6 | Li P, Yan J, Tu Q,et al. A steering control strategy based on torque fuzzy compensation for dual electric tracked vehicle[J]. Filomat,2018,32(5): 1953-1963. |
| 7 | Ziye Z, Haiou L, Huiyan C,et al. Tracking control of unmanned tracked vehicle in off-road conditions with large curvature[C]∥IEEE Intelligent Transportation Systems Conference (ITSC),Auckland, New Zealand, 2019: 3867-3873. |
| 8 | Ji X, He X, Lv C,et al. A vehicle stability control strategy with adaptive neural network sliding mode theory based on system uncertainty approximation[J]. Vehicle System Dynamics,2018,56(6): 923-946. |
| 9 | Guo H, Liu J, Cao D,et al. Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles[J]. Mechatronics,2018,50: 422-433. |
| 10 | 刘金琨,孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用,2007,24(3): 407-418. |
| Liu Jin-kun, Sun Fu-chun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications,2007,24(3): 407-418. | |
| 11 | Qi G, Fan X, Zhao Z. Fuzzy and sliding mode variable structure control of vehicle active steering system[J]. Recent Patents on Mechanical Engineering,2021,14(2): 226-241. |
| 12 | 李静,余春贤,陆辉,等. 基于模型预测的车辆稳定控制[J]. 吉林大学学报:工学版, 2013, 43(): 504-508. |
| Li Jing, Yu Chun-xian, Lu Hui, et al. Vehicle stability control based on model prediction[J]. Journal of Jilin University(Engineering and Technology Edition),2013,43(Sup.1): 504-508. | |
| 13 | Li S T, Liu H, Zhao D . et al. Adaptive sliding mode control of lateral stability of four-wheel hub electric vehicles[J]. International Journal of Automotive Technology,2020,21(3): 739-747. |
| 14 | Chen Dong-dong, Li Zong-wei, Chen Ying. PMSM double loop predictive control based on Luenberger observer[J]. Journal of Physics: Conference Series,2021,1754(1): No.012091. |
| 15 | Zhang Y, An Y, Wang G, Kong X. Multi motor neural PID relative coupling speed synchronous control[J]. Archives of Electrical Engineering,2020,69(1): 69-78. |
| 16 | 王建红,陈耀忠,陈桂,等. 基于交叉耦合控制的双电机同步控制系统研究[J]. 南京理工大学学报,2017,41(6): 693-697. |
| Wang Jian-hong, Chen Yao-zhong, Chen Gui. Dual-motor synchronous control system based on cross-coupled control[J]. Journal of Nanjing University of Science and Technology,2017,41(6): 693-697. | |
| 17 | Li L B, Sun L L, Zhang S Z,et al. Speed tracking and synchronization of multiple motors using ring coupling control and adaptive sliding mode control[J]. ISA Transactions,2015,58: 635-649. |
| 18 | 李金子,肖炯然,潘剑飞,等. 多永磁同步直线电机协同控制研究[J]. 吉林大学学报:信息科学版,2019,37(1): 32-39. |
| Li Jin-zi, Xiao Jiong-ran, Pan Jian-fei,et al. Research on cooperative control of multi-PMSM linear motors [J]. Journal of Jilin University (Information Science Edition),2019,37(1): 32-39. |
| [1] | Zhao-wei CHEN,Qian-hua PU. Suppression characteristics of vehicle⁃bridge coupling vibration of long⁃span cable⁃stayed bridge with resilient wheels [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2519-2532. |
| [2] | Ping-yi LIU,Xiao-ting LI,Ruo-lin GAO,Hai-tao LI,Wen-jun WEI,Ya WANG. Design and experiment of tilt-driving mechanism for the vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2185-2192. |
| [3] | Xue-jin HUANG,Jin-xing ZHONG,Jing-yu LU,Ji ZHAO,Wei XIAO,Xin-mei YUAN. Electric vehicle charging load forecasting method based on user portrait [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2193-2200. |
| [4] | Shu-pei ZHANG,Ming-yue XIA,Wei ZHANG,Zhao CHEN,Yi-xiang CHEN. Impact dynamic modeling and simulation for ball joint with clearance considering nonlinear stiffness [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2227-2235. |
| [5] | Hui CHEN,Ya-jun SHAO. Measurement method of pavement surface spectrum with multi⁃sensor coupling based on inertial benchmark [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2254-2262. |
| [6] | Lei CHEN,Yang WANG,Zhi-sheng DONG,Ya-qi SONG. A vehicle agility control strategy based on steering intent [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1257-1263. |
| [7] | Xin CHEN,Guan-chen ZHANG,Kang-ming ZHAO,Jia-ning WANG,Li-fei YANG,De-rong SITU. Influence of lap welds on the lightweight design of welded aluminum structures [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1282-1288. |
| [8] | Yong ZHANG,Feng-zhao MAO,Shui-chang LIU,Qing-yu WANG,Shen-gong PAN,Guang-sheng ZENG. Optimization on distortion grid of vehicle external flow field based on Laplacian Algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1289-1296. |
| [9] | Shao-hua WANG,Kun CHU,De-hua SHI,Chun-fang YIN,Chun LI. Robust compound coordinated control of HEV based on finite⁃time extended state observation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1272-1281. |
| [10] | Yan-li YIN,Xue-jiang HUANG,Xiao-liang PAN,Li-tuan WANG,Sen ZHAN,Xin-xin ZHANG. Hierarchical control of hybrid electric vehicle platooning based on PID and Q⁃Learning algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1481-1489. |
| [11] | Gui-shen YU,Xin CHEN,Zi-tao WU,Yi-xiong CHEN,Guan-chen ZHANG. Analysis of microstructure and mechanical properties of probeless friction stir spot welding joint in AA6061⁃T6 aluminum thin plate [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1338-1344. |
| [12] | Yan-tao TIAN,Xing HUANG,Hui-qiu LU,Kai-ge WANG,Fu-qiang XU. Multi⁃mode behavior trajectory prediction of surrounding vehicle based on attention and depth interaction [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1474-1480. |
| [13] | Hong-bo YANG,Wen-ku SHI,Zhi-yong CHEN,Nian-cheng GUO,Yan-yan ZHAO. Multi⁃objective optimization of macro parameters of helical gear based on NSGA⁃Ⅱ [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1007-1018. |
| [14] | Rui ZHAO,Yun LI,Hong-yu HU,Zhen-hai GAO. Vehicle collision warning method at intersection based on V2I communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1019-1029. |
| [15] | Xiao-bo CHEN,Ling CHEN. Variational Bayesian cooperative target tracking with unknown localization noise statistics [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1030-1039. |
|
||