吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (5): 1435-1442.doi: 10.13229/j.cnki.jdxbgxb.20220782
• 计算机科学与技术 • 上一篇
基于单目视觉的车辆屏显式封闭驾驶舱前视视野重现
王海涛1( ),刘慧卓1(),张学永1,韦健2,郭校源2,肖俊哲2
),刘慧卓1(),张学永1,韦健2,郭校源2,肖俊哲2
- 1.中国航空工业集团公司 沈阳飞机设计研究所 人机综合研究中心,沈阳 110035
2.吉林大学 通信工程学院,长春 130012
Forward-looking visual field reproduction for vehicle screen-displayed closed cockpit using monocular vision
Hai-tao WANG1(),Hui-zhuo LIU1(),Xue-yong ZHANG1,Jian WEI2,Xiao-yuan GUO2,Jun-zhe XIAO2
- 1.Shenyang Aircraft Design and Research Institute,Aviation Industry Corporation of China Limited,Shenyang 110035,China
2.College of Communication Engineering,Jilin University,Changchun 130012,China
摘要:
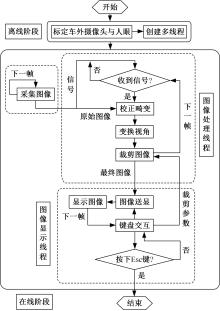
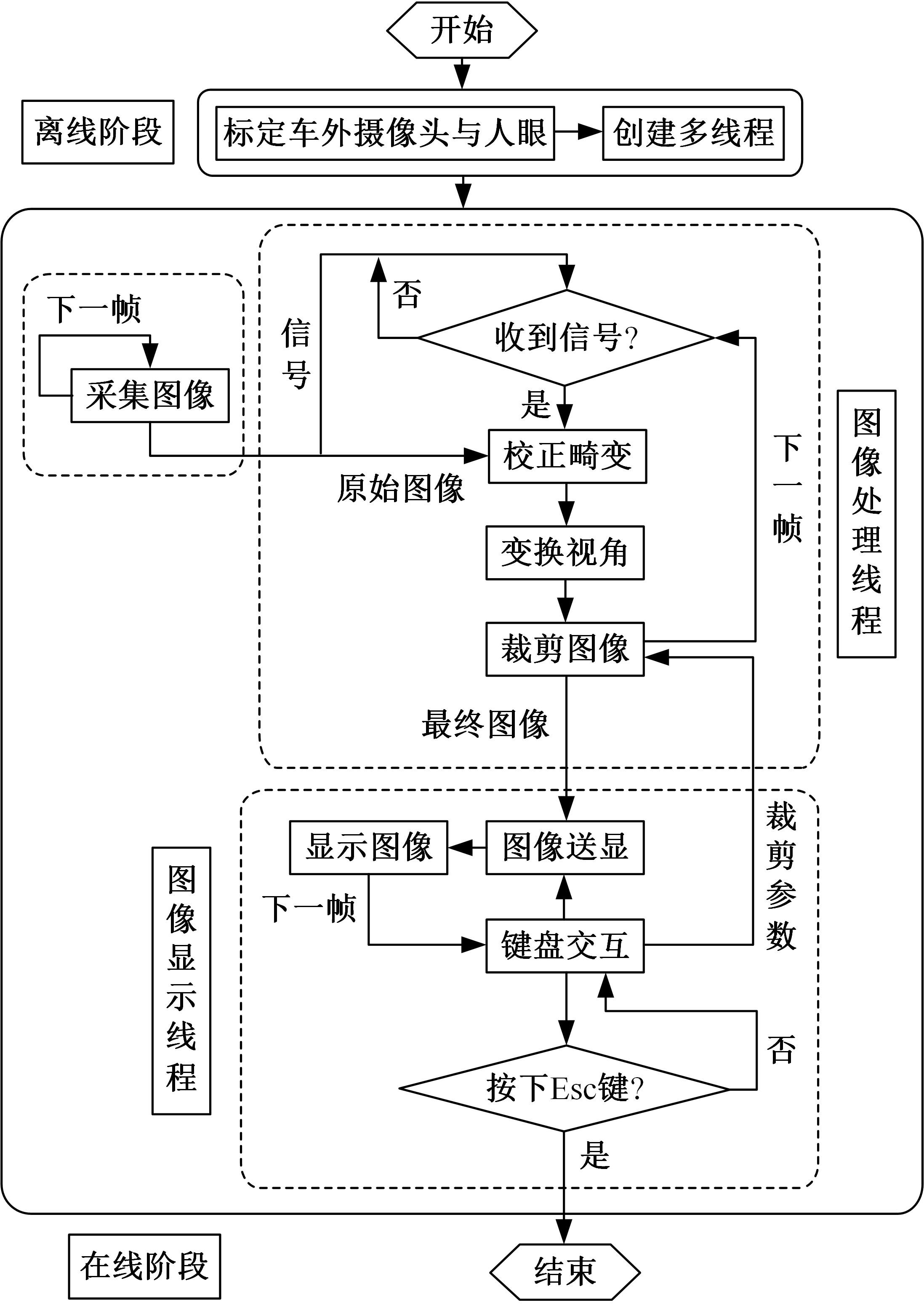
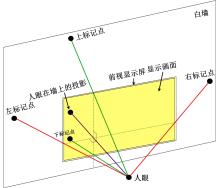
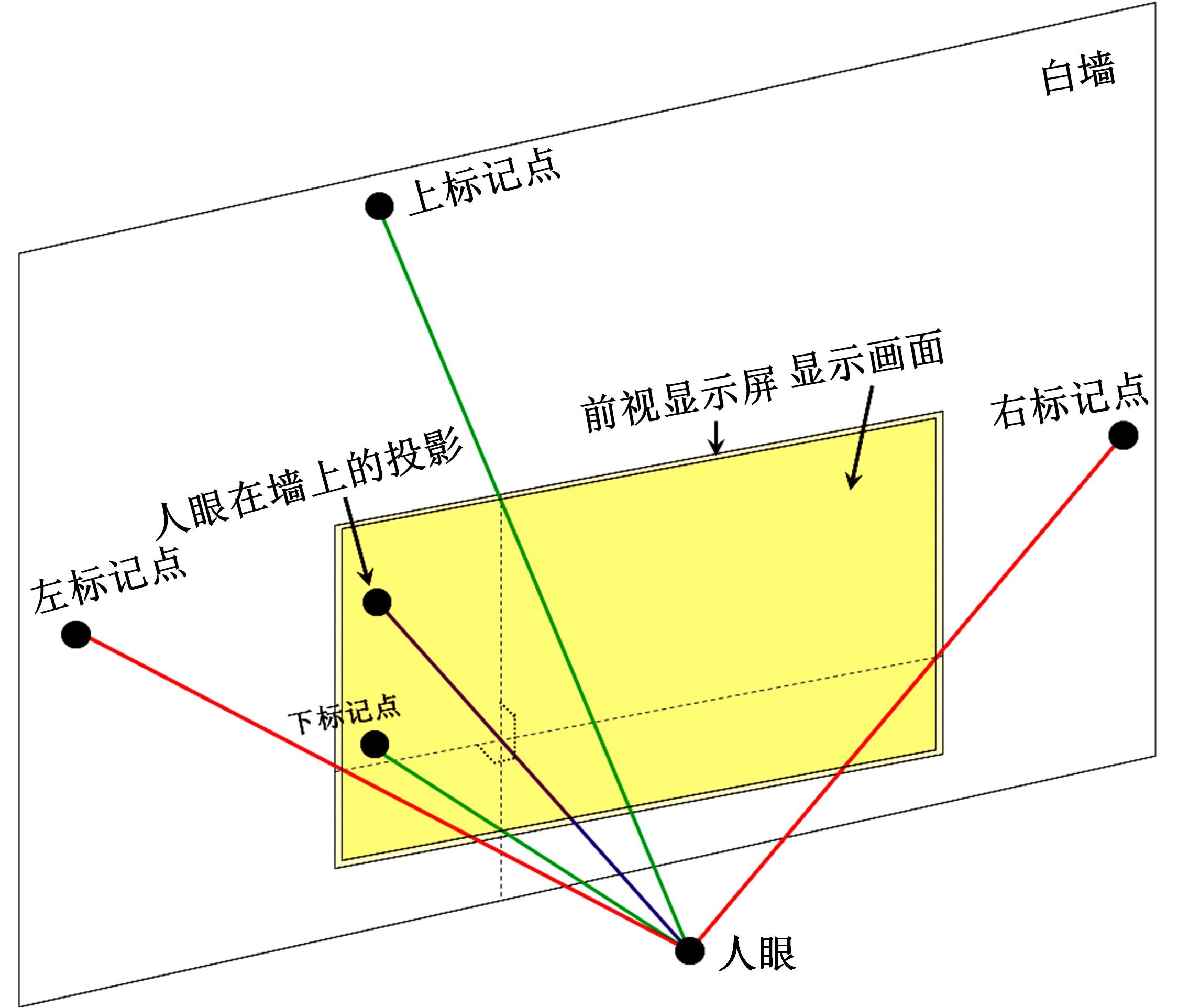
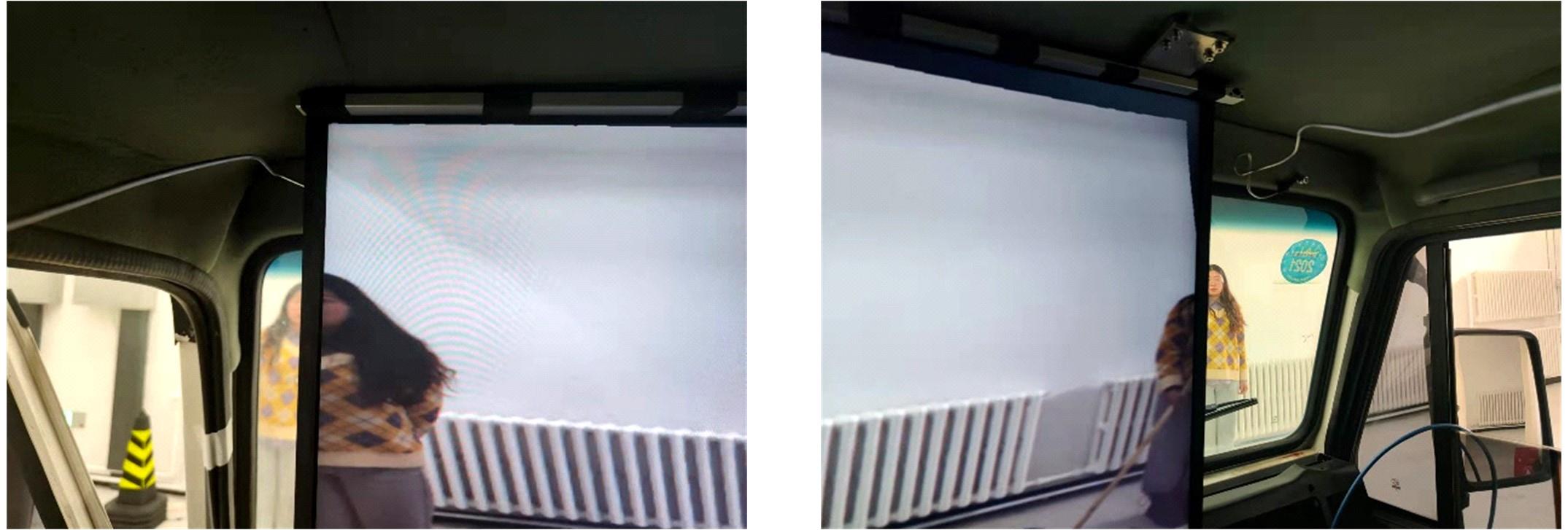
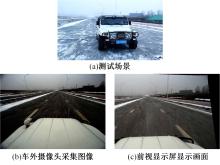
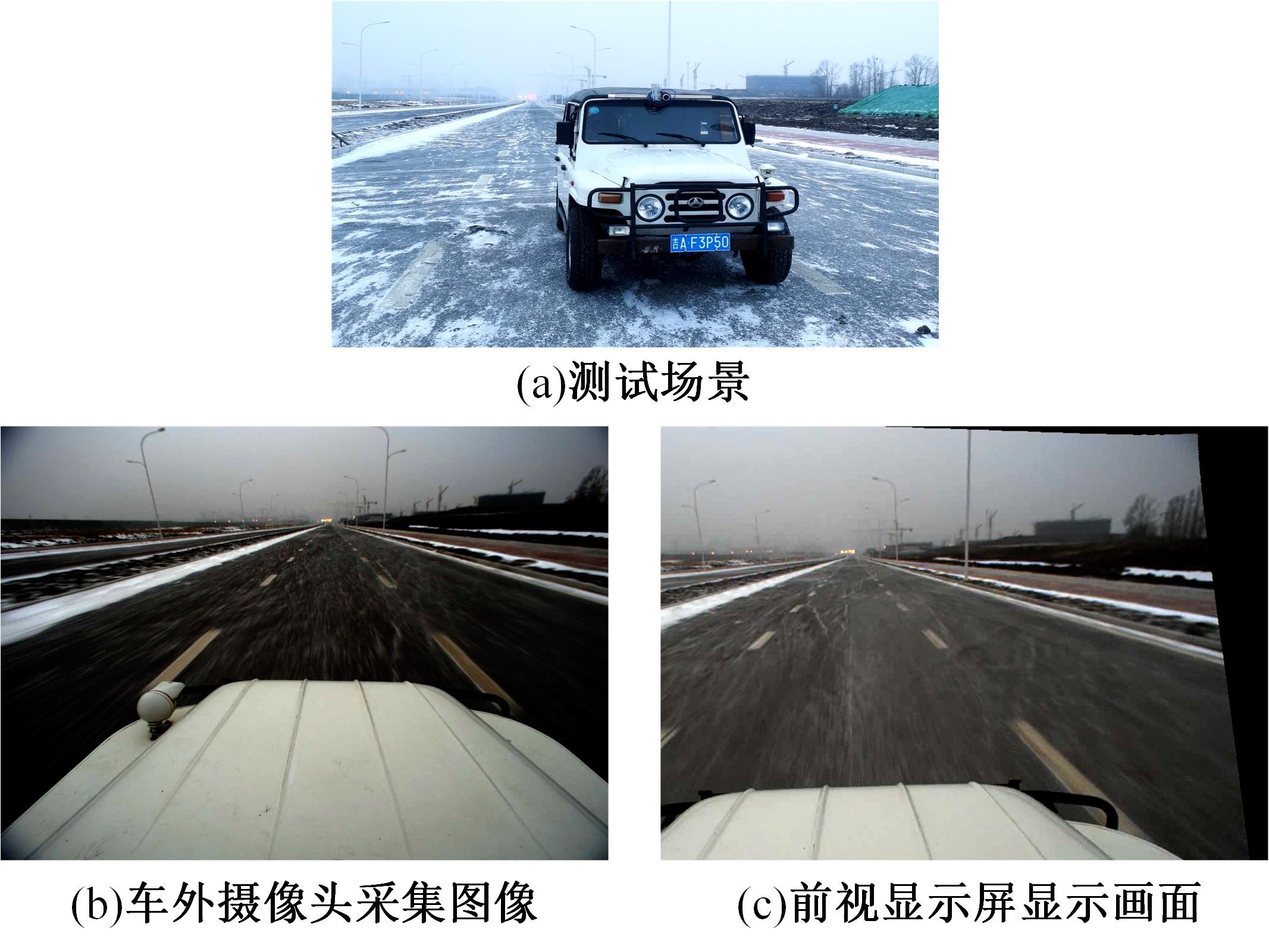
提出了一种基于单目视觉的车辆屏显式封闭驾驶舱前视视野重现方法。该方法通过准确的离线标定及在多线程并行框架下在线执行单目图像采集、前视图像处理和透视图像显示,可在显示屏上再现低失真度、高流畅度的前视画面。搭建了一套屏显式车辆封闭驾驶舱硬件系统,通过实验室和场地测试,从系统延时、前视视角、图像畸变、车辆高速直行、转弯、避障及驾车体验等方面验证了所提方法的有效性和高效性。该方法可为车辆封闭驾驶舱的后续改进提供良好的理论和实践基础。
中图分类号:
- TP391.7




| 1 | 谭兆一,陈白帆,苏苇,等. 基于第一视角的车辆盲区视野重现[J]. 软件导刊, 2020, 19(9): 196-200. |
| Tan Zhao-yi, Chen Bai-fan, Su Wei, et al. Vehicle blind spot reproduction system in first-person view[J]. Software Guide, 2020, 19(9): 196-200. | |
| 2 | 蒙杨超,杨汉飞. 流媒体全视屏后视镜的设计[J]. 时代汽车, 2020 (12): 78-80. |
| Meng Yang-chao, Yang Han-fei. Design of streaming media full screen rearview mirror[J]. Auto Time, 2020 (12): 78-80. | |
| 3 | 魏小冈. 基于电子透明理念的A柱盲区消除系统[J]. 时代汽车, 2022 (8): 138-139. |
| Wei Xiao-gang. A-pillar blind area elimination system based on electronic transparency concept[J]. Auto Time, 2022(8): 138-139. | |
| 4 | Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| 5 | 谭华春,夏红卫,李琴,等. 车载摄像机的立体标定方法[J]. 吉林大学学报:工学版, 2013, 43(1): 352-356. |
| Tan Hua-chun, Xia Hong-wei, Li Qin, et al. Three-dimensional calibration for on-board camera[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(1): 352-356. | |
| 6 | 迟德霞,王洋,宁立群,等. 张正友法的摄像机标定试验[J]. 中国农机化学报, 2015, 36(2): 287-289, 337. |
| Chi De-xia, Wang Yang, Ning Li-qun, et al. Experimental research of camera calibration based on Zhang's method[J]. Journal of Chinese Agricultural Mechanization, 2015, 36(2): 287-289, 337. | |
| 7 | Brown M, Lowe D. Automatic panoramic image stitching using invariant features[J]. International Journal of Computer Vision, 2007, 74(1): 59-73. |
| 8 | 徐明,刁燕,罗华,等. 基于改进的 SURF 算子和透视变换模型的图像配准[J]. 计算机与数字工程, 2020, 48(3): 671-677. |
| Xu Ming, Diao Yan, Luo Hua, et al. Image registration based on improved SURF operator and perspective transform model[J]. Computer & Digital Engineering, 2020, 48(3): 671-677. | |
| 9 | 兰凤崇,李继文,陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报:工学版, 2021, 51(4): 1437-1446. |
| Lan Feng-chong, Li Ji-wen, Chen Ji-qing. DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(4): 1437-1446. | |
| 10 | Chen S, Pu Z, Fan X, et al. Fixing defect of photometric loss for self-supervised monocular depth estimation[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 32(3): 1328-1338. |
| 11 | 高振海,李扬,张慧,等. 不同车速下驾驶员变换车道前视行为特征规律[J]. 吉林大学学报:工学版, 2016, 46(5): 1385-1390. |
| Gao Zhen-hai, Li Yang, Zhang Hui, et al. Driver's forward-looking behavior analysis during lane change under different speed[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1385-1390. | |
| 12 | Kwon Y, Park M. Predicting future frames using retrospective cycle GAN[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, US, 2019. |
| [1] | 王春阳,丘文乾,刘雪莲,肖博,施春皓. 基于平面拟合的地面点云精确分割方法[J]. 吉林大学学报(工学版), 2023, 53(3): 933-940. |
| [2] | 张立斌,冯诗源,单洪颖,王冠然. 基于轮胎滑移率与单目视觉的半挂汽车列车制动时序检测[J]. 吉林大学学报(工学版), 2023, 53(12): 3415-3423. |
| [3] | 李雪梅,王春阳,刘雪莲,施春浩,李国瑞. 基于超体素双向最近邻距离比的点云配准方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1918-1925. |
| [4] | 李雪梅,王春阳,刘雪莲,谢达. 基于SESTH的线性调频连续波激光雷达信号时延估计[J]. 吉林大学学报(工学版), 2022, 52(4): 950-958. |
| [5] | 林乐平,卢增通,欧阳宁. 面向非配合场景的人脸重建及识别方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2941-2946. |
| [6] | 窦慧晶,丁钢,高佳,梁霄. 基于压缩感知理论的宽带信号波达方向估计[J]. 吉林大学学报(工学版), 2021, 51(6): 2237-2245. |
| [7] | 金心宇,谢慕寒,孙斌. 基于半张量积压缩感知的粮情信息采集[J]. 吉林大学学报(工学版), 2021, 51(1): 379-385. |
| [8] | 郭立民,陈鑫,陈涛. 基于AlexNet模型的雷达信号调制类型识别[J]. 吉林大学学报(工学版), 2019, 49(3): 1000-1008. |
| [9] | 李琳辉, 伦智梅, 连静, 袁鲁山, 周雅夫, 麻笑艺. 基于卷积神经网络的道路车辆检测方法[J]. 吉林大学学报(工学版), 2017, 47(2): 384-391. |
| [10] | 厉茂海,洪炳熔,罗荣华 . 用改进的RaoBlackwellized粒子滤波器实现 移动机器人同时定位和地图创建[J]. 吉林大学学报(工学版), 2007, 37(02): 401-0406. |
|
||