吉林大学学报(工学版) ›› 2026, Vol. 56 ›› Issue (1): 31-43.doi: 10.13229/j.cnki.jdxbgxb.20240676
电动汽车制动模式切换过程电液协调控制策略
张向文1,2( ),王子豪1
),王子豪1
- 1.桂林电子科技大学 电子工程与自动化学院,桂林 541004
2.桂林电子科技大学 智能综合自动化广西高校重点实验室,桂林 541004
Electro-hydraulic coordinated control strategy for braking mode switching process of electric vehicles
Xiang-wen ZHANG1,2(),Zi-hao WANG1
- 1.School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China
2.Key Laboratory of Intelligence Integrated Automation in Guanxi Universities,Guilin University of Electronic Technology,Guilin 541004,China
摘要:
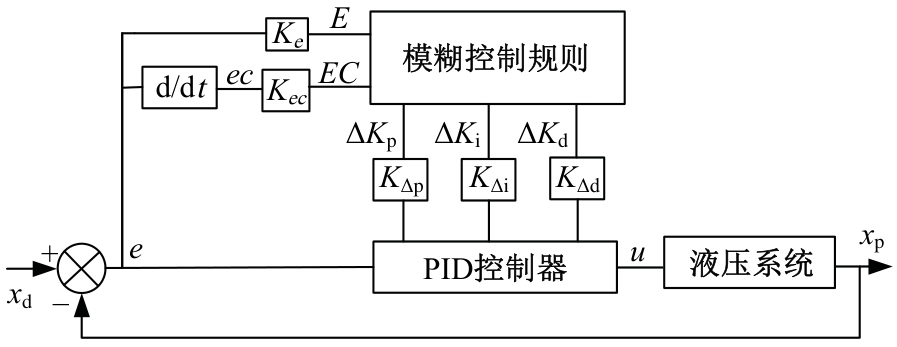
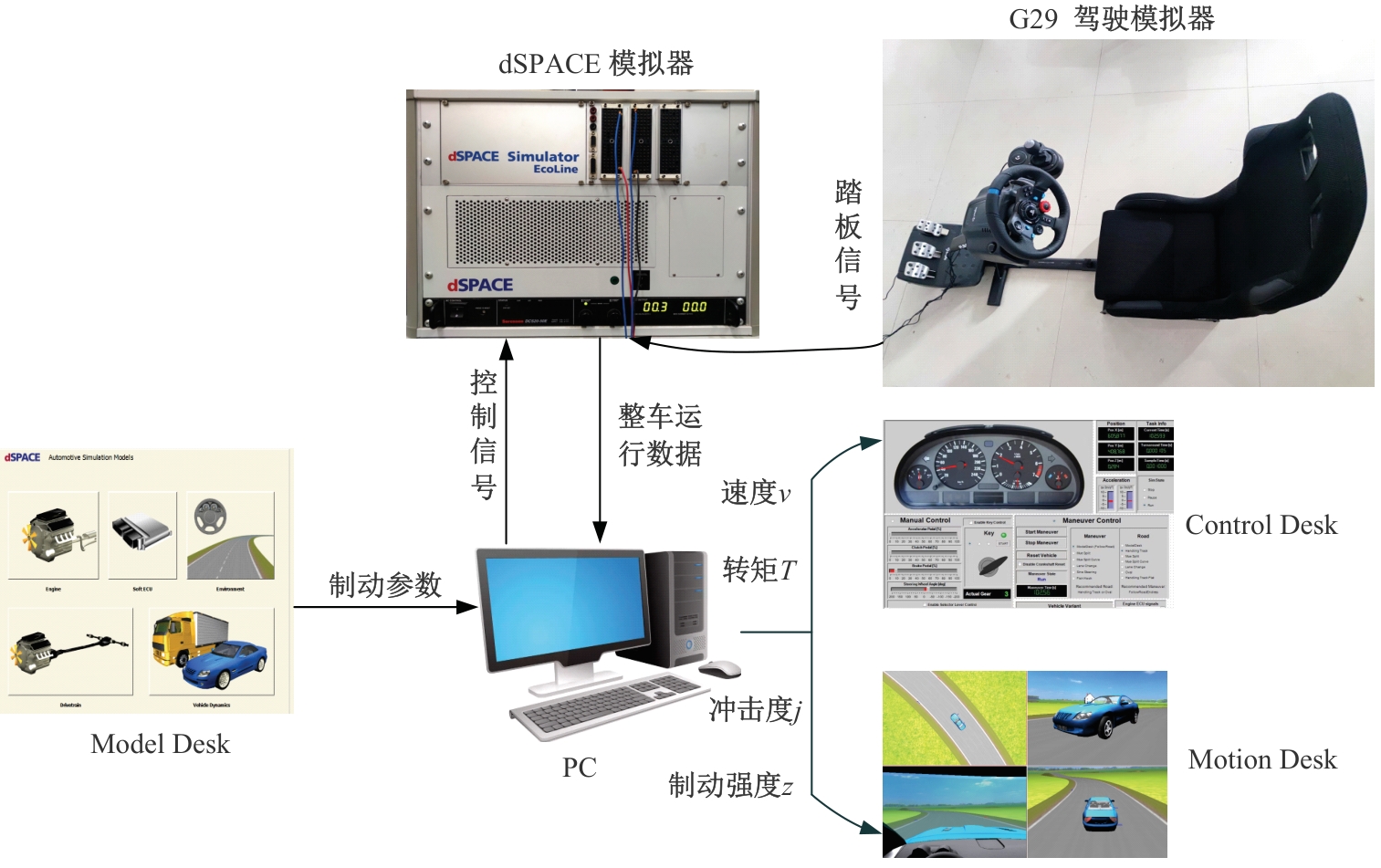
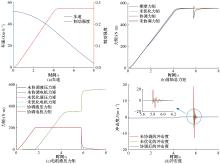
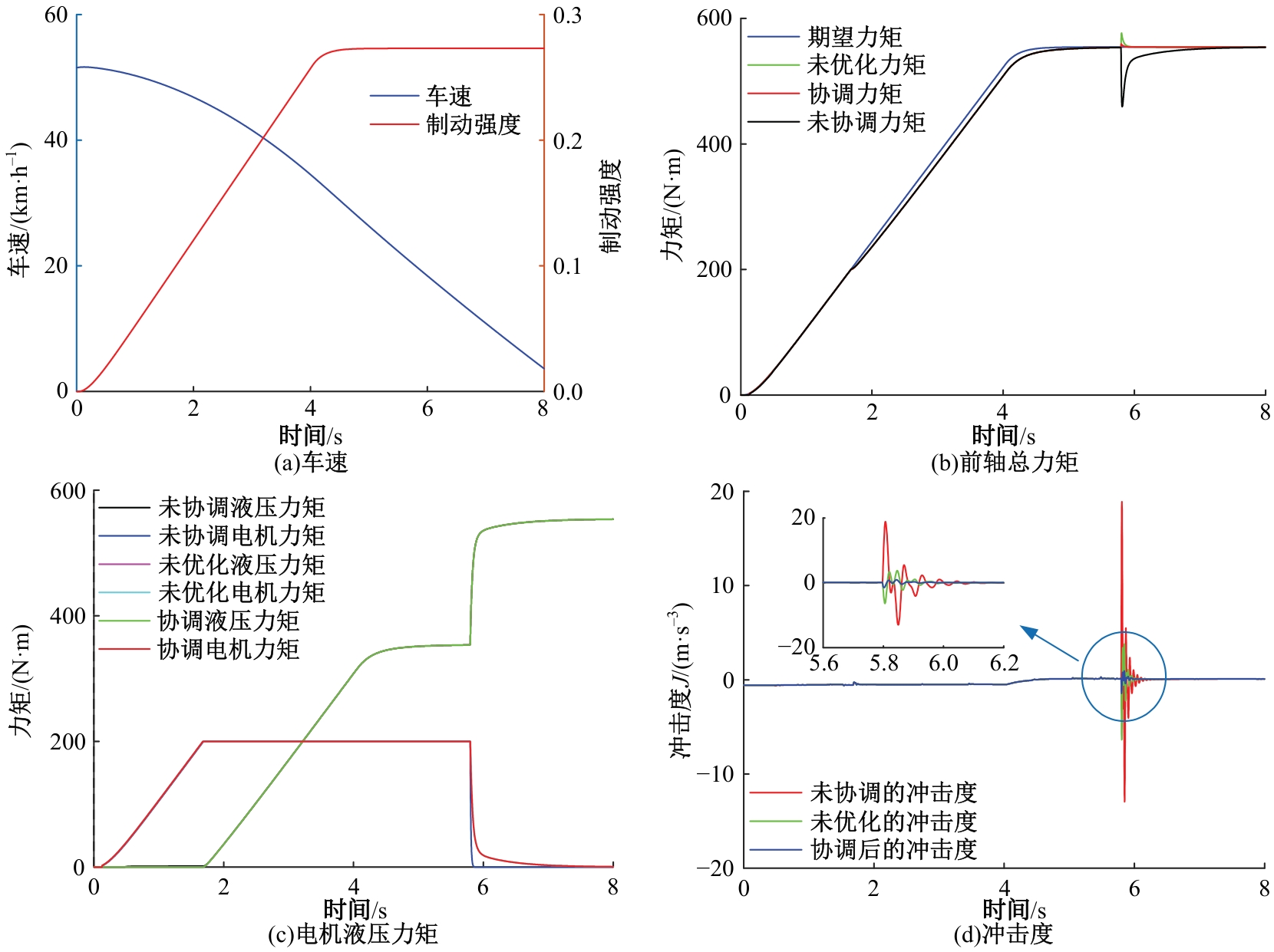
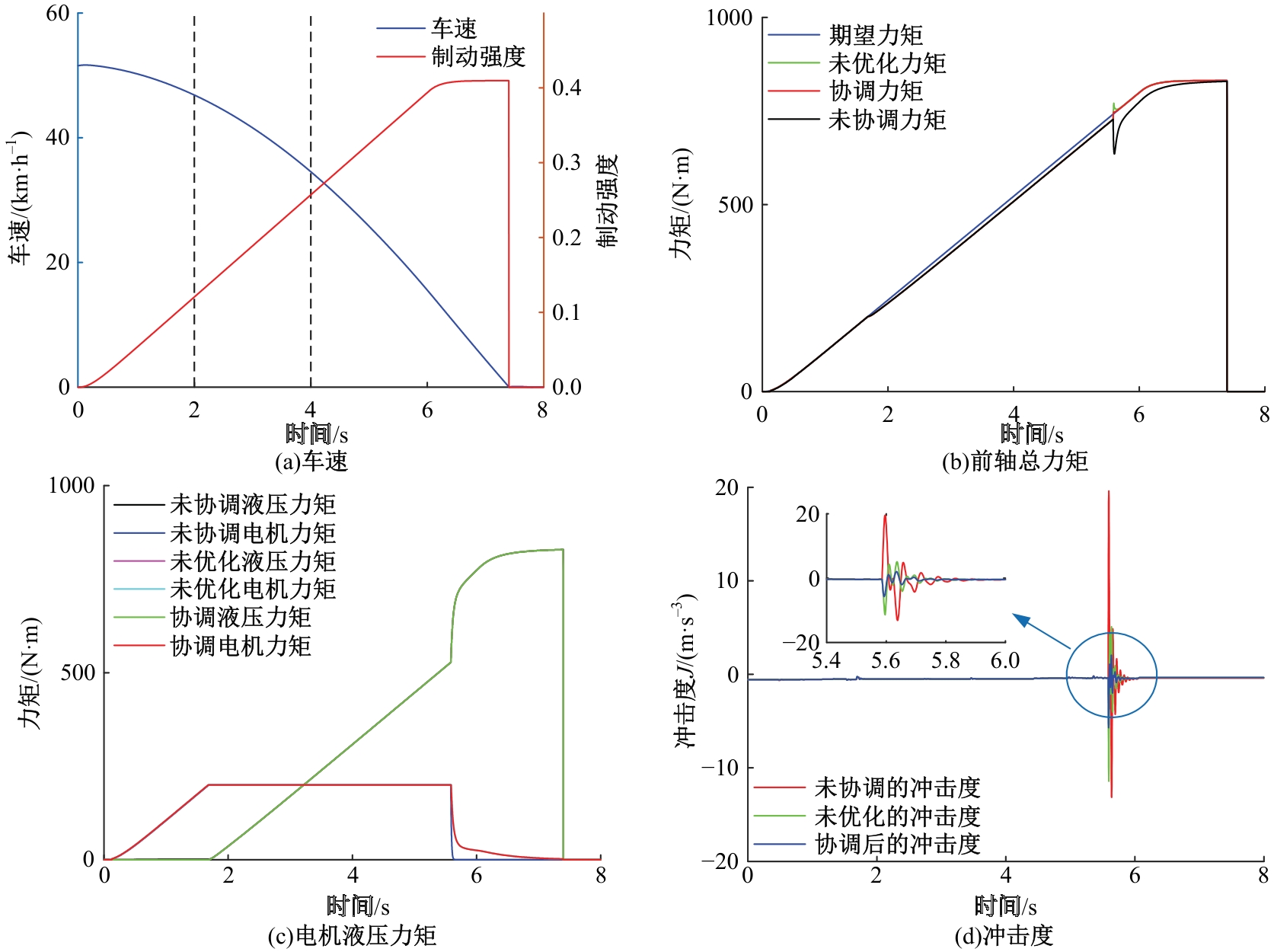
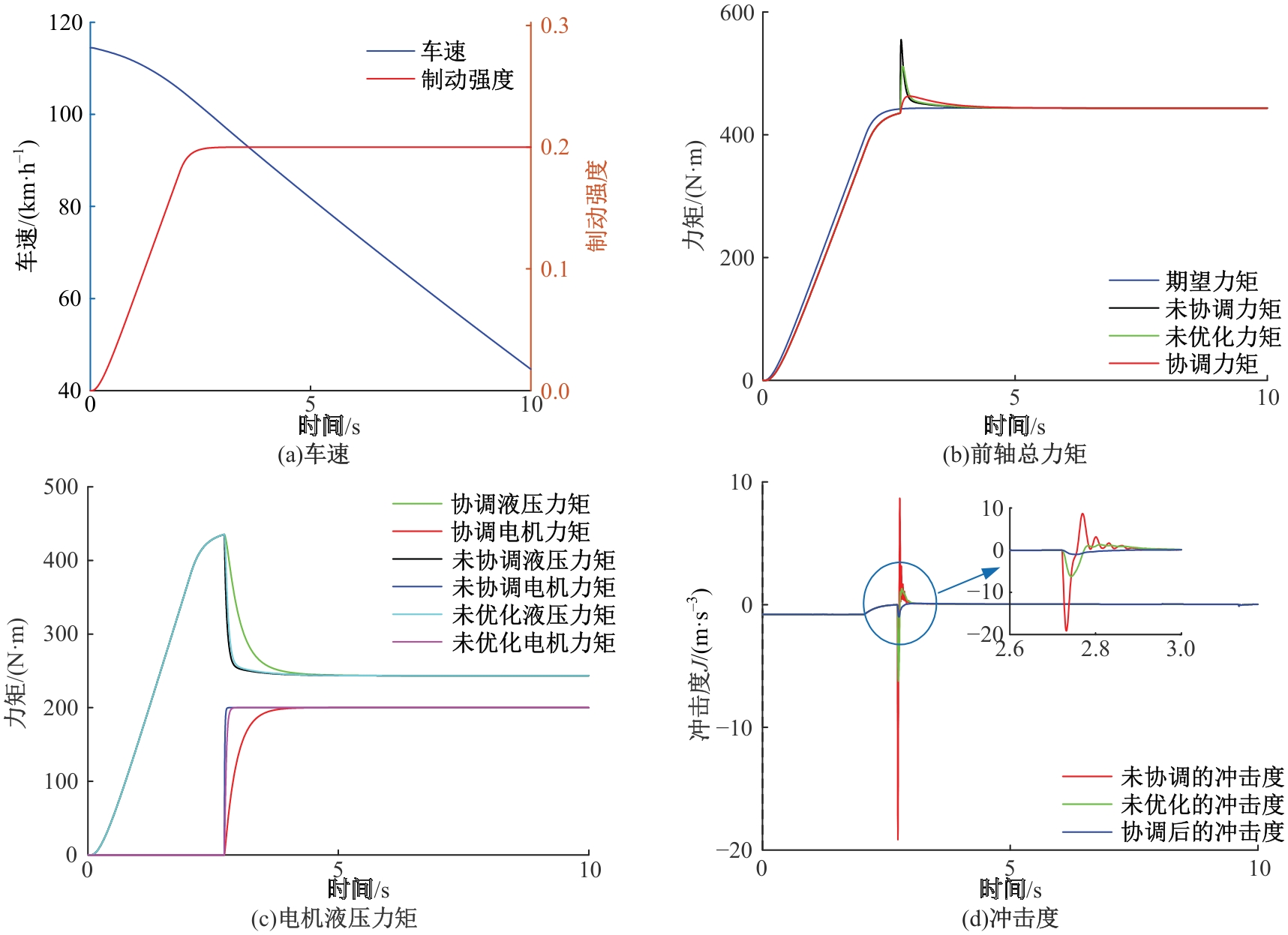
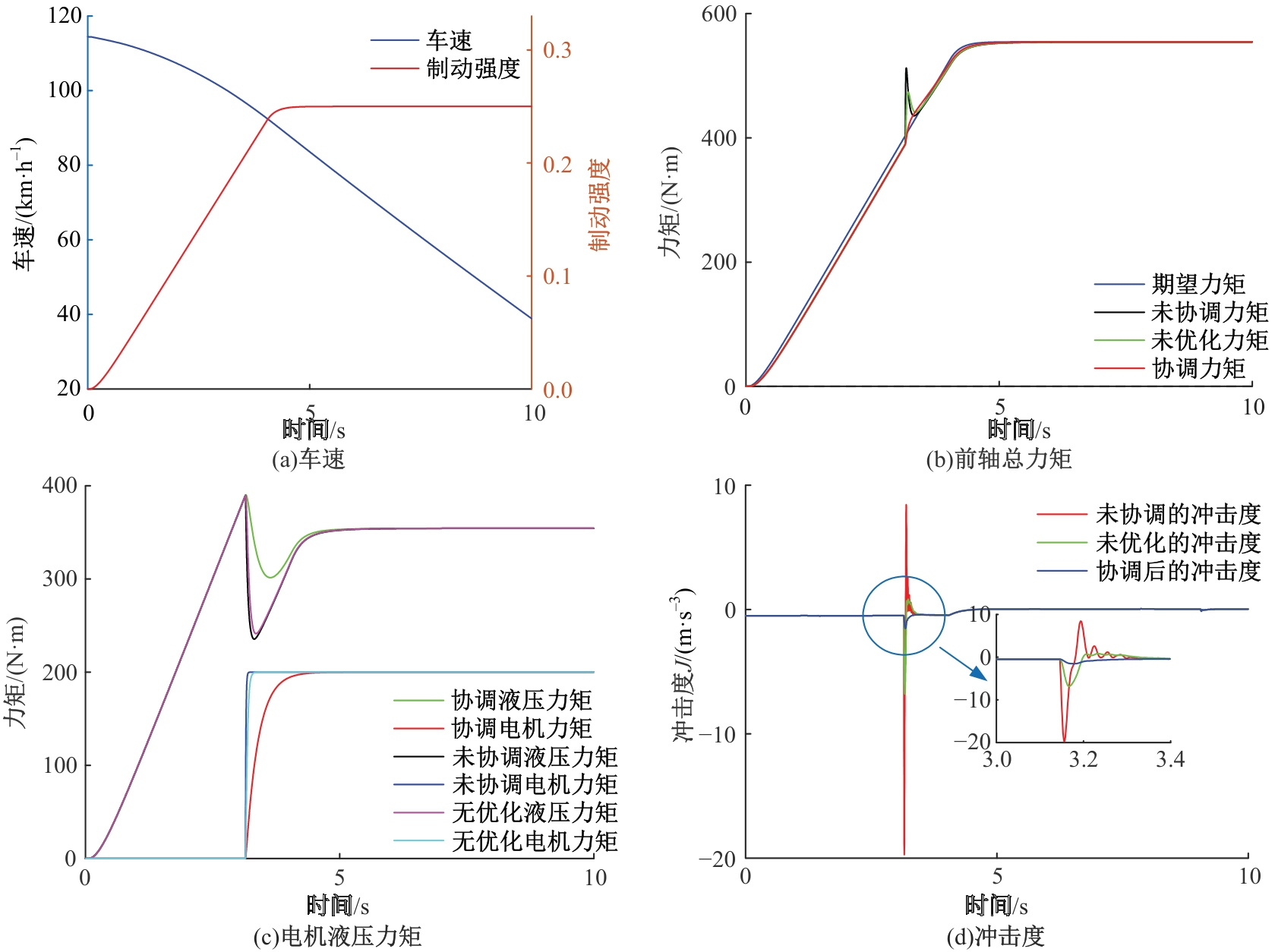
针对在电动汽车复合制动过程中,电机与液压制动系统响应速度存在差异,当两种制动系统切换时会引起冲击,从而影响驾驶舒适性的问题,本文提出了一种应用于制动模式切换过程的电液协调控制策略。通过模糊PID控制液压制动系统,同时通过模型预测控制电机制动系统,并采用海鸥优化算法优化模型预测控制权重系数,消除两种制动系统响应特性的差异。搭建半实物仿真系统平台进行了实验验证,结果显示,在恒制动强度与变制动强度工况下,不同模式切换过程,冲击度至少降低13.9
中图分类号:
- U463.5



| [1] | 马建, 刘晓东, 陈轶嵩, 等. 中国新能源汽车产业与技术发展现状及对策[J]. 中国公路学报, 2018, 31(8): 1-19. |
| Ma Jian, Liu Xiao-dong, Chen Yi-song, et al. Current situation and countermeasures of China's new energy vehicle industry and technology development[J]. China Journal of Highway and Transport, 2018, 31(8): 1-19. | |
| [2] | 申伟, 陆敏恂.中国新能源汽车产业的发展现状与展望[J]. 汽车实用技术, 2020, 45(22): 239-242. |
| Shen Wei, Lu Min-xun. Current situation and prospects of China's new energy vehicle industry[J]. Automotive Practical Technology, 2020, 45(22): 239-242. | |
| [3] | Niu G, Shang F, Krishnamurthy M, et al. Design and analysis of an electric hydraulic hybrid powertrain in electric vehicles[J]. IEEE Transactions on Transportation Electrification, 2017, 3(1): 48-57. |
| [4] | Li L, Zhang T, Sun B, et al. Research on electro-hydraulic ratios for a novel mechanical-electro-hydraulic power coupling electric vehicle[J]. Energy, 2023, 270: No.126970. |
| [5] | 王健, 盘朝奉, 陈燎, 等. 基于模糊规则的电动汽车机电复合制动力分配策略[J]. 重庆理工大学学报:自然科学, 2021, 35(9): 66-72, 82. |
| Wang Jian, Pan Chao-feng, Chen Liao, et al. Electromechanical composite braking force distribution strategy for electric vehicles based on fuzzy rules[J]. Journal of Chongqing University of Technology(Natural Science), 2021, 35(9): 66-72, 82. | |
| [6] | Zhao Y, Deng W, Wu J, et al. Torque control allocation based on constrained optimization with regenerative braking for electric vehicles[J]. International Journal of Automotive Technology, 2017, 18(4): 685-698. |
| [7] | Xu S, Tang Z, He Y, et al. Regenerative braking control strategy of electric truck based on braking security[J]. Information Technology and Intelligent Transportation Systems, 2016, 455: 263-273. |
| [8] | Tang M, Zhang X. Optimal regenerative braking control strategy for electric vehicles based on braking intention recognition and load estimation[J]. IEEE Transactions on Vehicular Technology, 2024, 73(3): 3378-3392. |
| [9] | 刘杨, 孙泽昌, 王猛. 一体式电液复合制动系统制动力协调控制及试验[J]. 吉林大学学报: 工学版, 2016, 46(3): 718-724. |
| Liu Yang, Sun Ze-chang, Wang Meng. Coordinated control and experiment of integrated electro-hydraulic composite braking system[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 718-724. | |
| [10] | Yang Y, He Y, Yang Z, et al. Torque coordination control of an electro-hydraulic composite brake system during mode switching based on braking intention[J]. Energies, 2020, 13(8): No.2031. |
| [11] | Zhang Z, Ma R, Wang L, et al. Novel PMSM control for anti-lock braking considering transmission properties of the electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10378-10386. |
| [12] | 刘平, 姚宇, 刘阳, 等. 电动汽车电-液复合制动协调控制方法[J]. 机械设计与制造, 2023(4): 251-256. |
| Liu Ping, Yao Yu, Liu Yang, et al. Coordinated control method of electro-hydraulic composite braking for electric vehicles[J]. Mechanical Design and Manufacturing, 2023(4): 251-256. | |
| [13] | 杨阳, 何云东, 罗倡, 等. 电动汽车制动模式切换扭矩协调控制[J]. 振动与冲击, 2021, 40(10): 304-314. |
| Yang Yang, He Yun-dong, Luo Chang, et al. Coordinated control of torque during braking mode transition for electric vehicles[J]. Journal of Vibration and Shock, 2021, 40(10): 304-314. | |
| [14] | 余卓平, 史彪飞, 熊璐, 等. 集成式电子液压制动系统的复合制动协调控制[J]. 同济大学学报: 自然科学版, 2019, 47(6): 851-856. |
| Yu Zhuo-ping, Shi Biao-fei, Xiong Lu, et al. Coordinated control of composite braking in integrated electro-hydraulic braking system[J]. Journal of Tongji University(Natural Science Edition), 2019, 47(6): 851-856. | |
| [15] | He Q, Yang Y, Luo C, et al. Energy recovery strategy optimization of dual-motor drive electric vehicle based on braking safety and efficient recovery[J]. Energy, 2022, 248: No.123543. |
| [16] | 靳立强, 孙志祥, 郑迎, 等.电动轮汽车复合再生制动系统防抱协调控制[J].吉林大学学报: 工学版, 2017, 47(5): 1344-1351. |
| Jin Li-qiang, Sun Zhi-xiang, Zheng Ying, et al. Coordinated anti-lock braking control of compound regenerative braking system in electric-wheel vehicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(5): 1344-1351. | |
| [17] | 王骏骋, 吕林峰, 李剑敏, 等. 分布驱动电动汽车电液复合制动最优滑模ABS控制[J]. 吉林大学学报: 工学版, 2022, 52(8): 1751-1758. |
| Wang Jun-cheng, Lin-feng Lü, Li Jian-min, et al. Optimal sliding mode ABS control of electro-hydraulic composite braking for distributed drive electric vehicles[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1751-1758. | |
| [18] | Luo Y, Liu C. Pre- and post-fault tolerant operation of a six-phase PMSM motor using FCS-MPC without controller reconfiguration[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 254-263. |
| [19] | 高逍男, 陈希有. 一种改进的永磁同步电机模型预测控制[J]. 电力自动化设备, 2017, 37(4): 197-202, 217. |
| Gao Xiao-nan, Chen Xi-you. An improved model predictive control of permanent magnet synchronous motor[J]. Electric Power Automation Equipment, 2017, 37(4): 197-202, 217. | |
| [20] | Mynar Z, Vesely L, Vaclavek P. PMSM model predictive control with field-weakening implementation[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5156-5166. |
| [21] | Wang F, Li J, Li Z, et al. Design of model predictive control weighting factors for PMSM using gaussian distribution-based particle swarm optimization[J]. IEEE Transactions on Industrial Electronics, 2022, 69(11): 10935-10946. |
| [22] | 高金武, 孙少龙, 高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报:工学版, 2025, 55(8): 2475-2486. |
| Gao Jin-wu, Sun Shao-long, Gao Bing-zhao. Speed fluctuation suppression strategy of range extender based on motor torque compensation[J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2475-2486. | |
| [23] | 邓新阳, 李伟, 胡春艳, 等. 旋转直驱阀的双闭环模糊PID控制仿真分析[J].吉林大学学报:理学版, 2021, 59(4): 915-921. |
| Deng Xin-yang, Li Wei, Hu Chun-yan, et al. Simulation analysis of dual closed-loop fuzzy PID control for rotary direct-drive valve[J]. Journal of Jilin University(Science Edition), 2021, 59(4): 915-921. | |
| [24] | 史文库, 张曙光, 张友坤, 等. 基于改进海鸥算法的磁流变减振器模型辨识[J]. 吉林大学学报:工学版, 2022, 52(4): 764-772. |
| Shi Wen-ku, Zhang Shu-guang, Zhang You-kun, et al. Model identification of magnetorheological damper based on improved seagull algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 764-772. |
| [1] | 高镇海,鲍明喜,赵睿,唐明弘,高菲. 基于目标锚点驱动的多模态轨迹预测方法[J]. 吉林大学学报(工学版), 2026, 56(1): 21-30. |
| [2] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [3] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [4] | 李寿涛,贾湘怡,朱军,郭洪艳,于丁力. 基于Level-K的智能驾驶汽车无信控交叉路口决策方法[J]. 吉林大学学报(工学版), 2025, 55(9): 3069-3078. |
| [5] | 朱冰,孟鹏翔,刘斌,韩嘉懿,赵健,陈志成,宋东鉴,陶晓文. 基于交通环境信息的虚拟车道线拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2935-2945. |
| [6] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [7] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [8] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [9] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [10] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [11] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [12] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [13] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [14] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [15] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
|
||