吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (12): 3793-3803.doi: 10.13229/j.cnki.jdxbgxb.20240800
• 车辆工程·机械工程 • 上一篇
融合遗传算法和递推最小二乘法的半挂车稳定性参数估计
曾小华1( ),李凯旋1,韩凯2,宫铭遥3(),宋大凤1
),李凯旋1,韩凯2,宫铭遥3(),宋大凤1
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.潍柴动力股份有限公司 内燃机与动力系统全国重点实验室,山东 潍坊 262123
3.吉林化工大学 航空工程学院,吉林省 吉林市 132102
Semi⁃trailer stability parameter estimation based on genetic algorithm and recursive least squares method
Xiao-hua ZENG1(),Kai-xuan LI1,Kai HAN2,Ming-yao GONG3(),Yu-feng HUANG1
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.The State Key Laboratory of Engine and Powertrain System,Weichai Power Co. ,Ltd. ,Weifang,262123,China
3.School of Aeronautical Engineering,Jilin University of Chemical Technology,Jilin 132102,China
摘要:
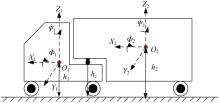
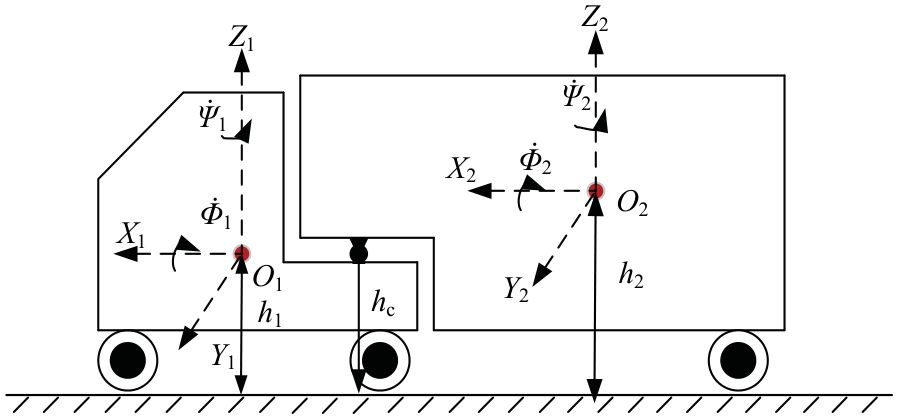
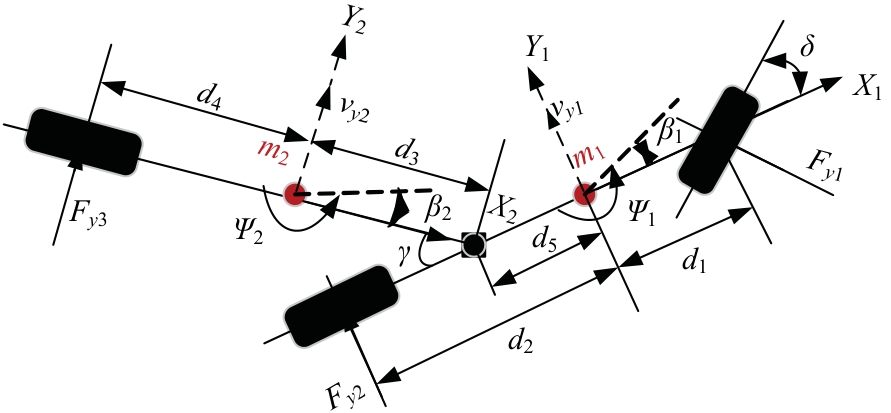
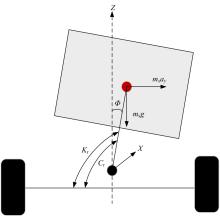
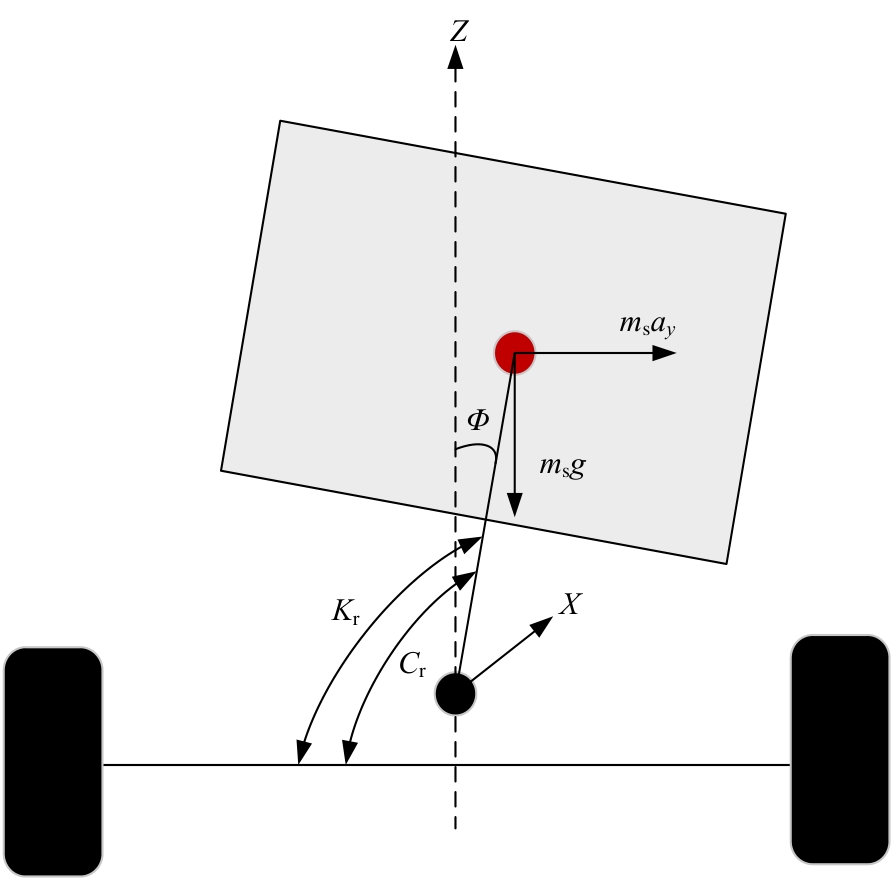
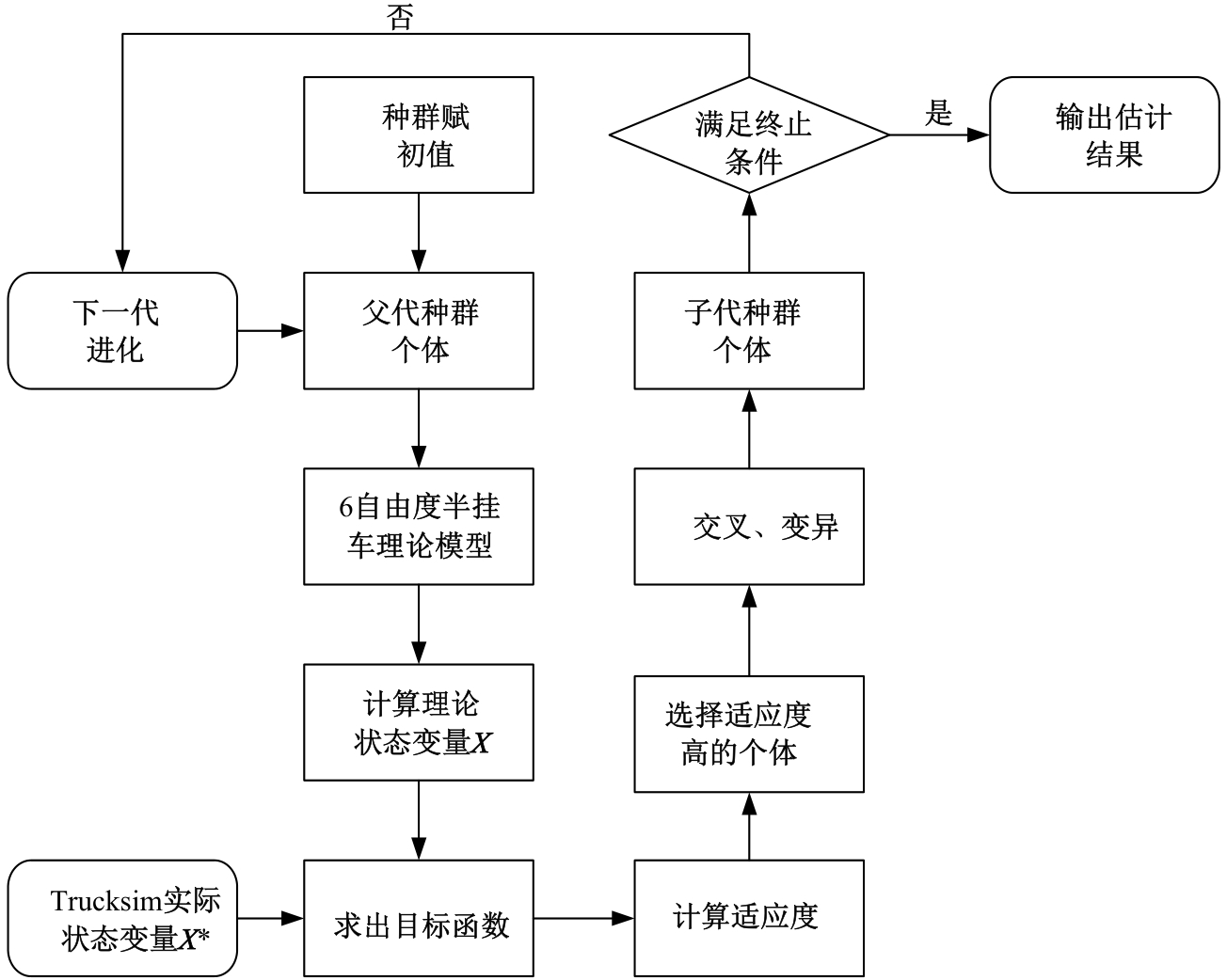
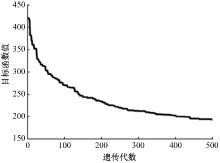
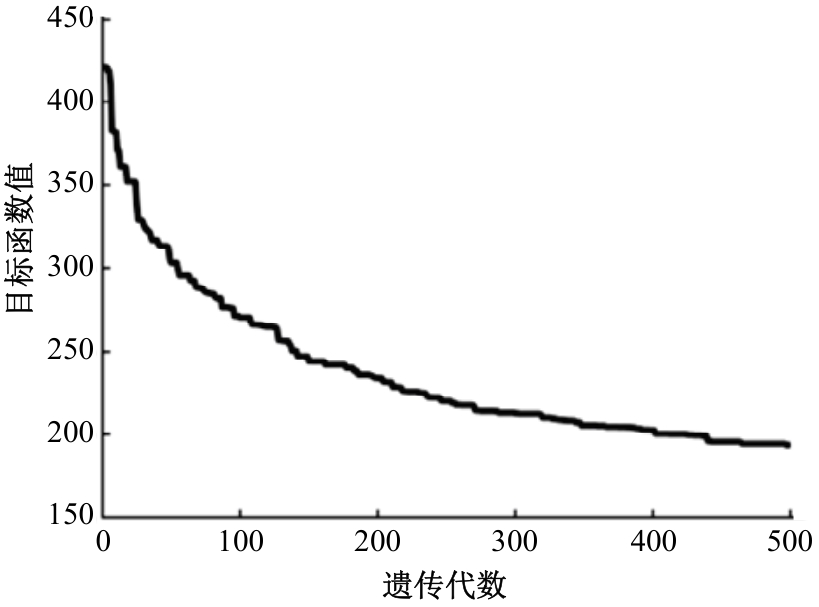
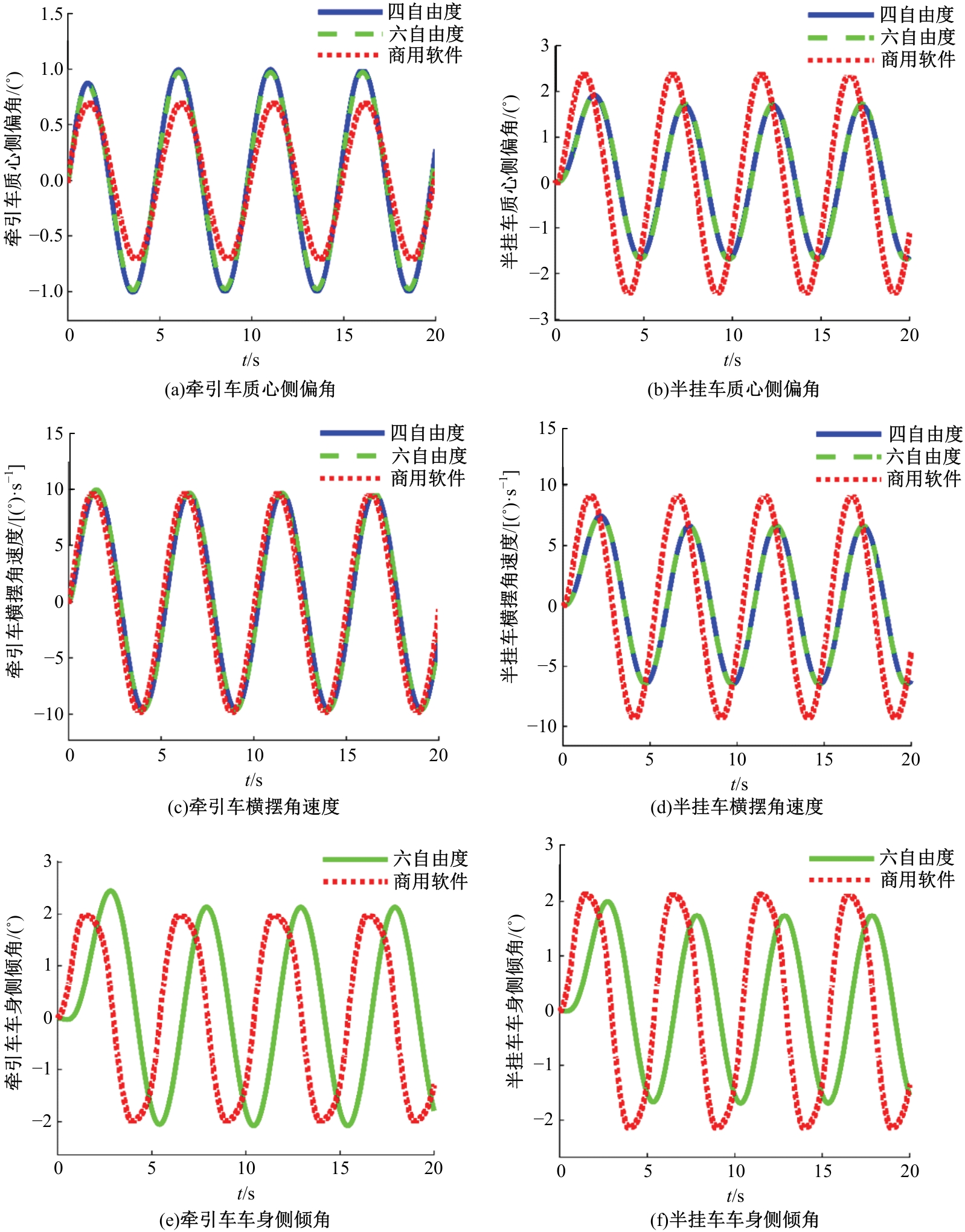
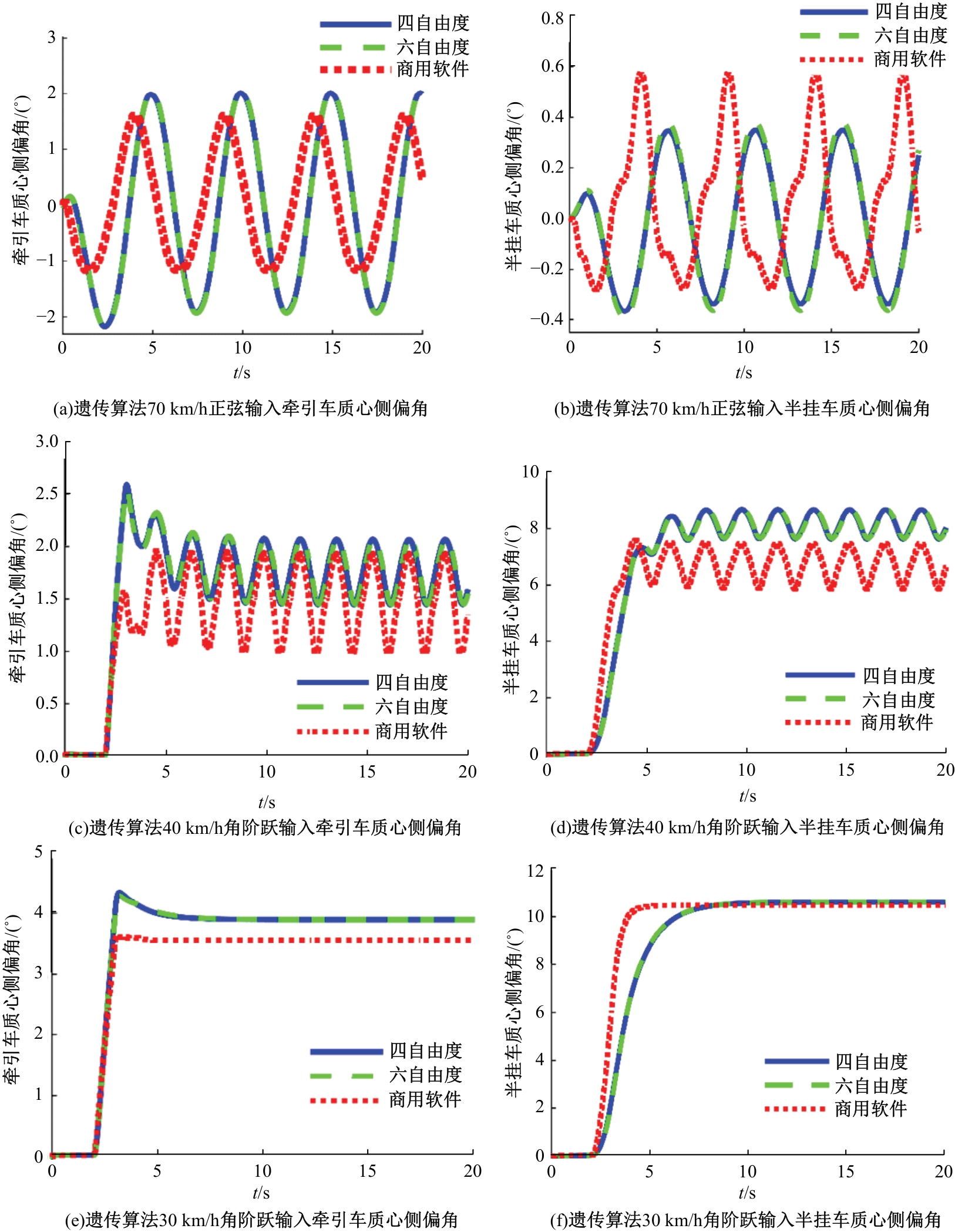
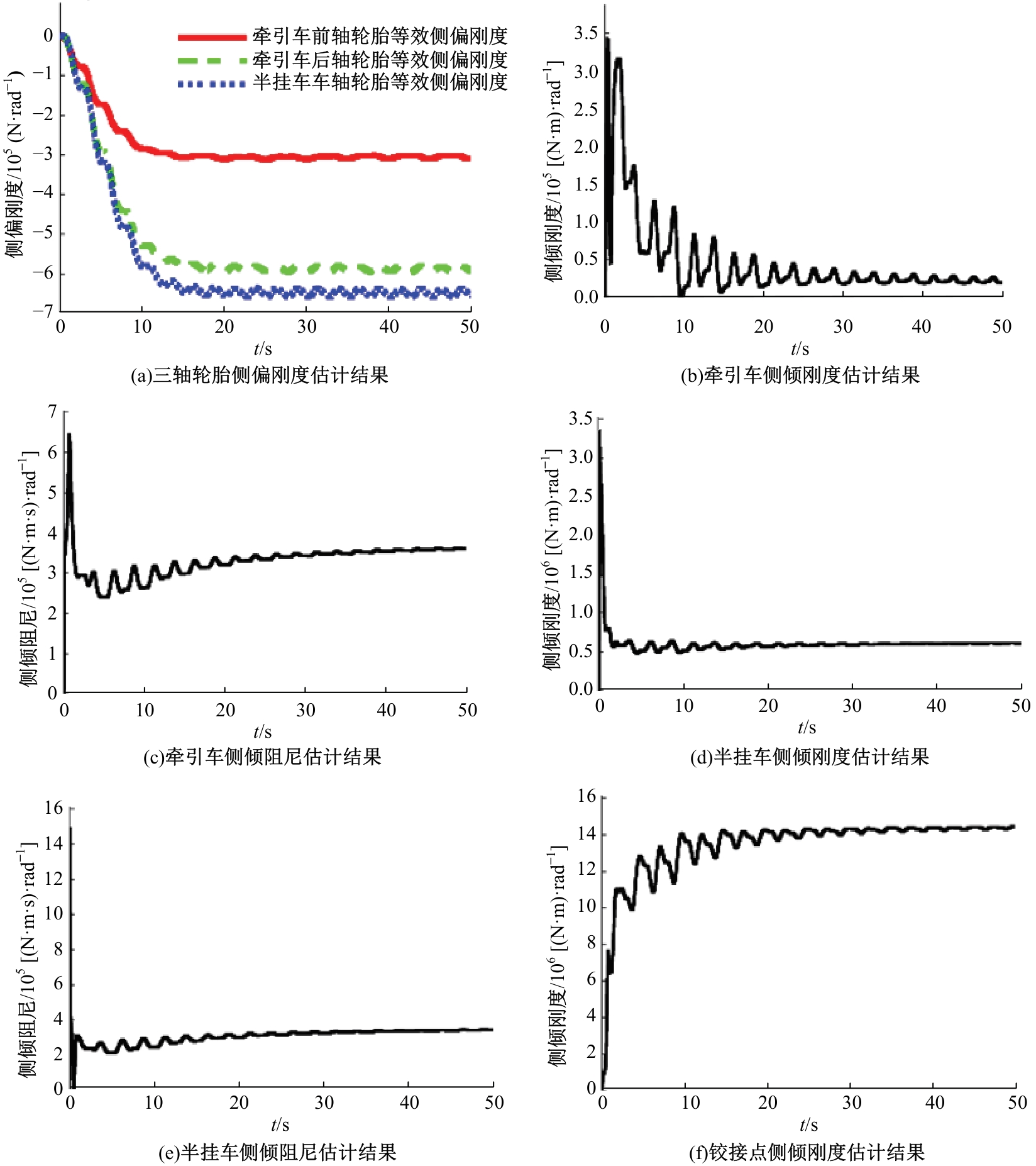
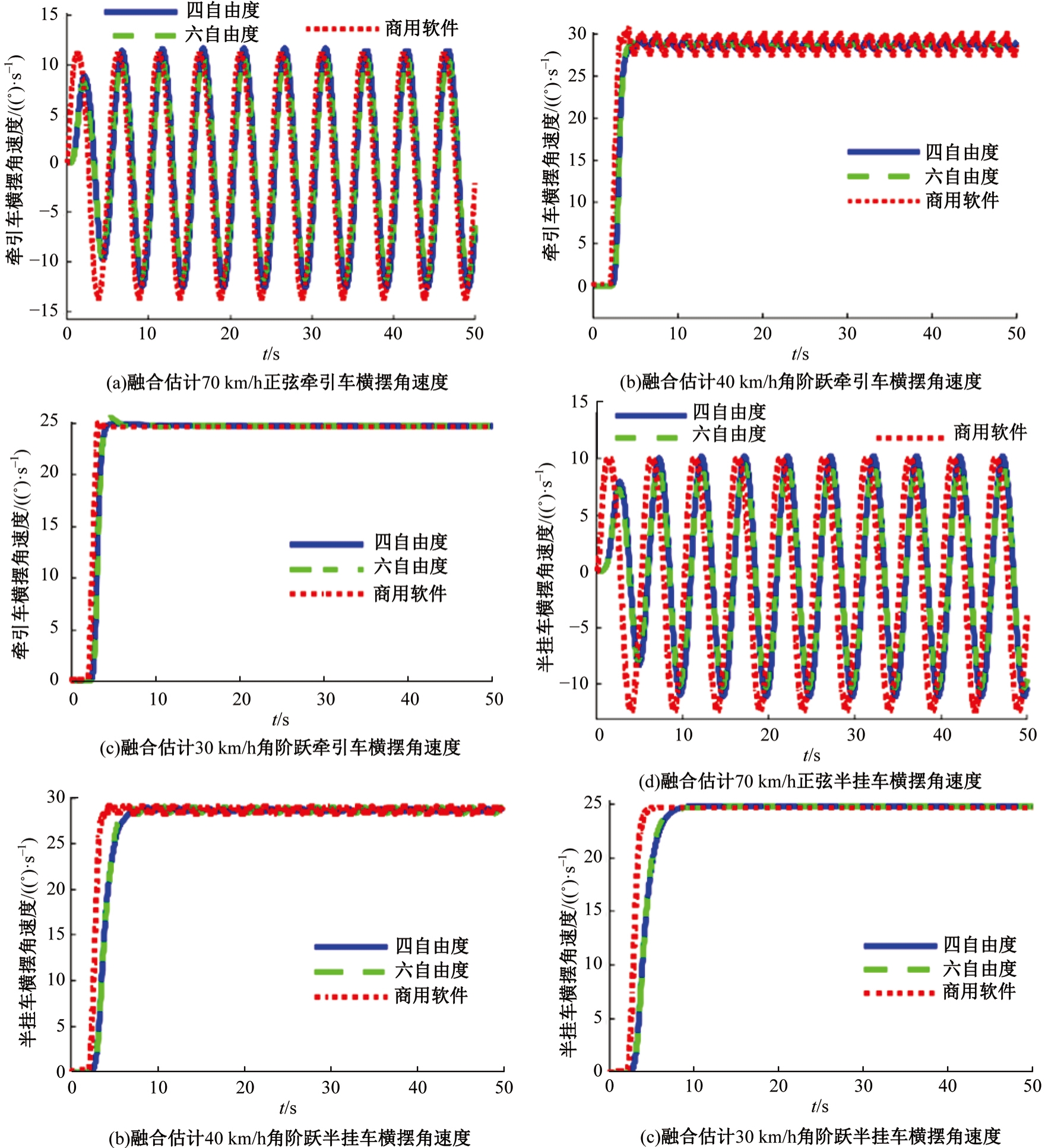
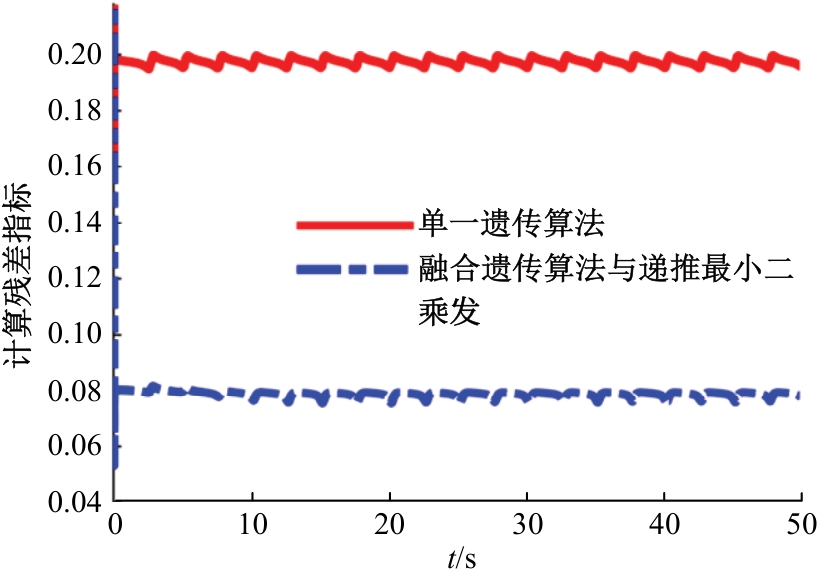
采用遗传算法与递推最小二乘法相结合的方法估计半挂车的稳定性参数,从而解决轮胎侧偏刚度、车辆侧倾刚度、车身侧倾阻尼等参数难以通过传感器直接测量的问题。该方法有效弥补了传统离线辨识方法在工况适应能力方面的不足。相较于一般商用车,半挂车的结构更加复杂且使用工况多样,因此在确保车辆安全性和品质的过程中,必须更加关注半挂车的稳定性控制。实现这一目标的前提是建立高精度、高置信度的半挂车动力学理论模型。在此基础上,理论模型可作为跟随目标,以实车或商用软件车辆模型与理论模型的输出状态差值作为控制量进行调节。本文通过Trucksim与Simulink的联合仿真,在特定输入和工况条件下,对比Trucksim软件模型与理论模型的输出重合情况。结果表明,基于本文方法识别的侧倾刚度等参数所建立的理论模型,在工况适应性和精度方面均优于传统离线辨识方法,估计误差降低约6%。该成果为后续基于该理论模型开展的半挂车稳定性控制研究奠定了基础。
中图分类号:
- U461.6





| [1] | 李一兵, 孙岳霆, 徐成亮, 等. 基于交通事故数据的汽车安全技术发展趋势分析[J]. 汽车安全与节能学报, 2016, 7(3): 241-253. |
| Li Yi-bing, Sun Yue-ting, Xu Cheng-liang, et al. Analysis of the development trend of automobile safety technology based on traffic accident data[J].Journal of Automotive Safety and Energy Conservation, 2016, 7(3): 241-253. | |
| [2] | 刘饯. 基于参数辨识的半挂汽车列车稳定性控制策略研究[D]. 武汉: 华中科技大学机械工程学院, 2021. |
| Liu Jian. Study on stability control strategy of semi-trailer based on parameter identification[D].Wuhan: School of Mechanical Engineering, Huazhong University of Science and Technology, 2021. | |
| [3] | Bolhasani M R, Goldberg T. Genetic Algorithms in Search, Optimization and Machine Learning[M].Reading,Ma: Addison-Wesley, 1989. |
| [4] | Bolhasani M R, Azadi S. Parameter estimation of vehicle handling model using genetic algorithm[J]. Scientia Iranica, 2002, 11(12): 121-127. |
| [5] | Baffet G, Charara A, Lechner D. Experimental evaluation of observers for tire-road forces, sideslip angle and wheel cornering stiffness[J]. Vehicle System Dynamics, 2008, 46(6): 501-520. |
| [6] | 宗长富, 聂枝根, 张振. 厢式半挂车简化模型参数辨识研究[J]. 中国公路学报, 2014, 27(4): 112-120. |
| Zong Chang-fu, Nie Zhi-gen, Zhang Zhen. Parameters identification for simplified modle of container semi-trailer[J].China Journal of Highway and Transport, 2014, 27(4): 112-120. | |
| [7] | 王杰. 基于扩展卡尔曼滤波的车辆参数辨识[J]. 现代机械, 2019, 1(3): 4-9. |
| Wang Jie. Vehicle parameter identification based on EKF[J]. Modern Machinery, 2019, 1(3): 4-9. | |
| [8] | 易鑫, 陈勇. 扩展卡尔曼滤波与遗传算法结合的车辆状态估计[J]. 重庆理工大学学报, 2022, 36 (12): 1-8. |
| Yi Xin, Chen Yong. Extended vehicle state estimation based on the combination of Kalman filter and genetic algorithm[J]. Journal of Chongqing University of Technology, 2022, 36(12): 1-8. | |
| [9] | 李洪雪, 李世武, 孙文财, 等. 考虑垂向-侧向运动的半挂列车动力学建模及分析[J]. 吉林大学学报: 工学版, 2021, 51(5): 49-56. |
| Li Hong-xue, Li Shi-wu, Sun Wen-cai,et al. A semi-trailer train that considers vertical⁃lateral movement dynamic modeling and analysis[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(5): 49-56. | |
| [10] | 梁群彰. 基于参数辨识的半挂汽车列车侧翻控制系统的研究[D]. 南宁: 广西大学交通运输学院, 2016. |
| Liang Qun-zhang. Research on rollover control system of semi-trailer train based on parameter identification[D].Nanning: School of Transportation, Guangxi University, 2016. | |
| [11] | 叶明, 卢祥伟, 张利杰, 等. 双遗忘因子最小二乘法车辆质量和时变坡度估计[J]. 重庆理工大学学报, 2023, 37(6): 1-9. |
| Ye Ming, Lu Xiang-wei, Zhang Li-jie, et al. Double forgetting factor, least squares vehicle mass and time-varying slope estimation[J]. Journal of Chongqing University of Technology, 2023, 37(6): 1-9. | |
| [12] | Miege A, Cebon D. Active roll control of an experimental articulated vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering. 2005, 219(6): 791-806 |
| [1] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [2] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [3] | 李寿涛,贾湘怡,朱军,郭洪艳,于丁力. 基于Level-K的智能驾驶汽车无信控交叉路口决策方法[J]. 吉林大学学报(工学版), 2025, 55(9): 3069-3078. |
| [4] | 朱冰,孟鹏翔,刘斌,韩嘉懿,赵健,陈志成,宋东鉴,陶晓文. 基于交通环境信息的虚拟车道线拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2935-2945. |
| [5] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [6] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [7] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [8] | 刘琼昕,王甜甜,王亚男. 非支配排序粒子群遗传算法解决车辆位置路由问题[J]. 吉林大学学报(工学版), 2025, 55(7): 2464-2474. |
| [9] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [10] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [11] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [12] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [13] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [14] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [15] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
|
||