吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (6): 1836-1843.doi: 10.13229/j.cnki.jdxbgxb20180904
CE-3月球车筛网轮月面沉陷行为试验
陈百超1( ),邹猛2(),党兆龙1,黄晗2,贾阳1,石睿杨2,李建桥2
),邹猛2(),党兆龙1,黄晗2,贾阳1,石睿杨2,李建桥2
- 1. 中国空间技术研究院 北京空间飞行器总体设计部,北京 100094
2. 吉林大学 工程仿生教育部重点实验室,长春130022
Experiment on pressure⁃sinkage for mesh wheels of CE⁃3lunar rover on lunar regolith
Bai-chao CHEN1(),Meng ZOU2(),Zhao-long DANG1,Han HUANG2,Yang JIA1,Rui-yang SHI2,Jian-qiao LI2
- 1. Beijing Institute of Spacecraft System Engineering, China Academy of Space Technology, Beijing 100094, China
2. Key Laboratory of Bionics Engineering, Ministry of Education, Jilin University, Changchun 130022, China
摘要:
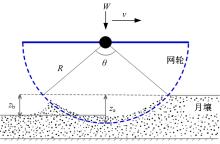
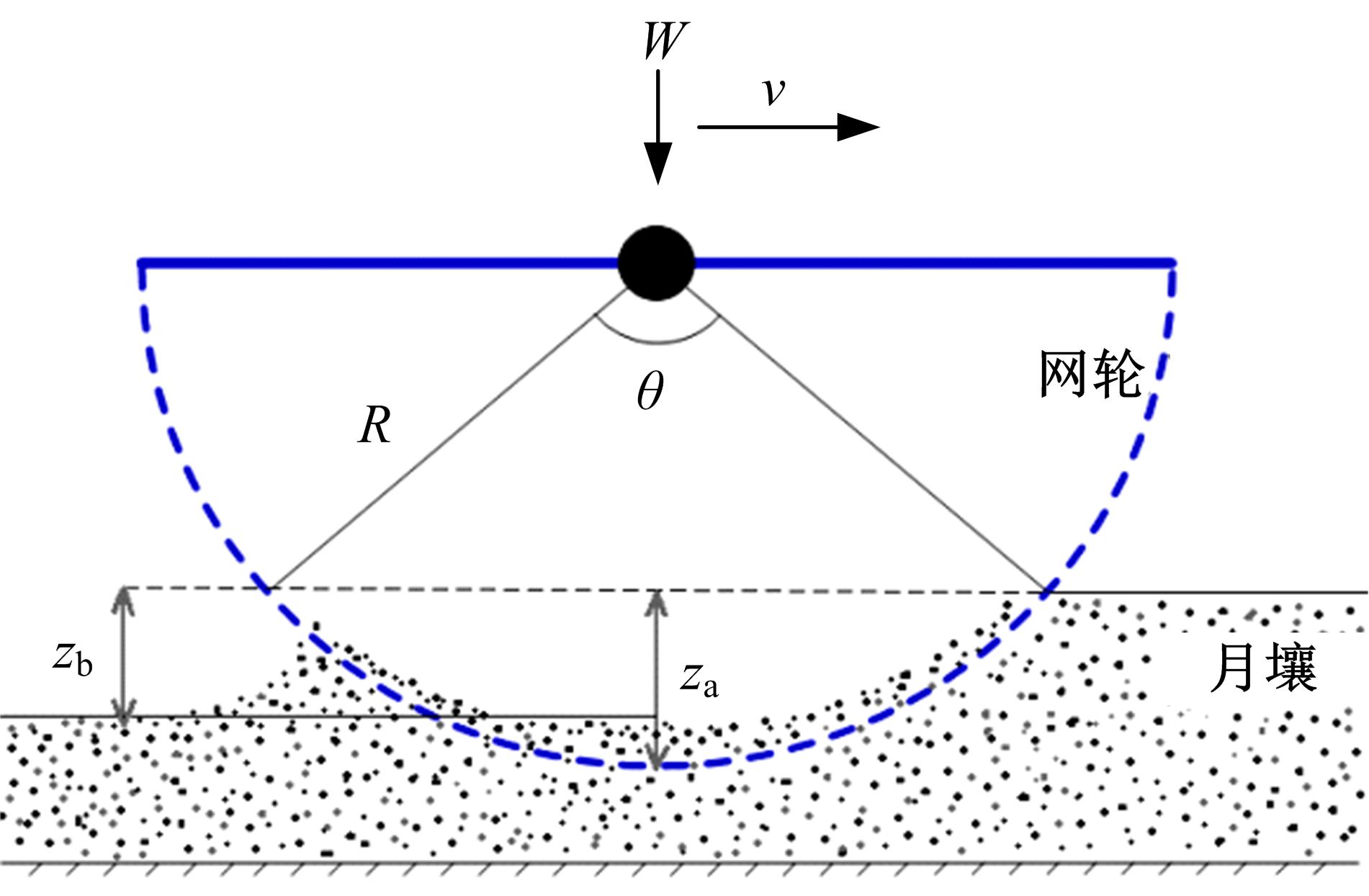
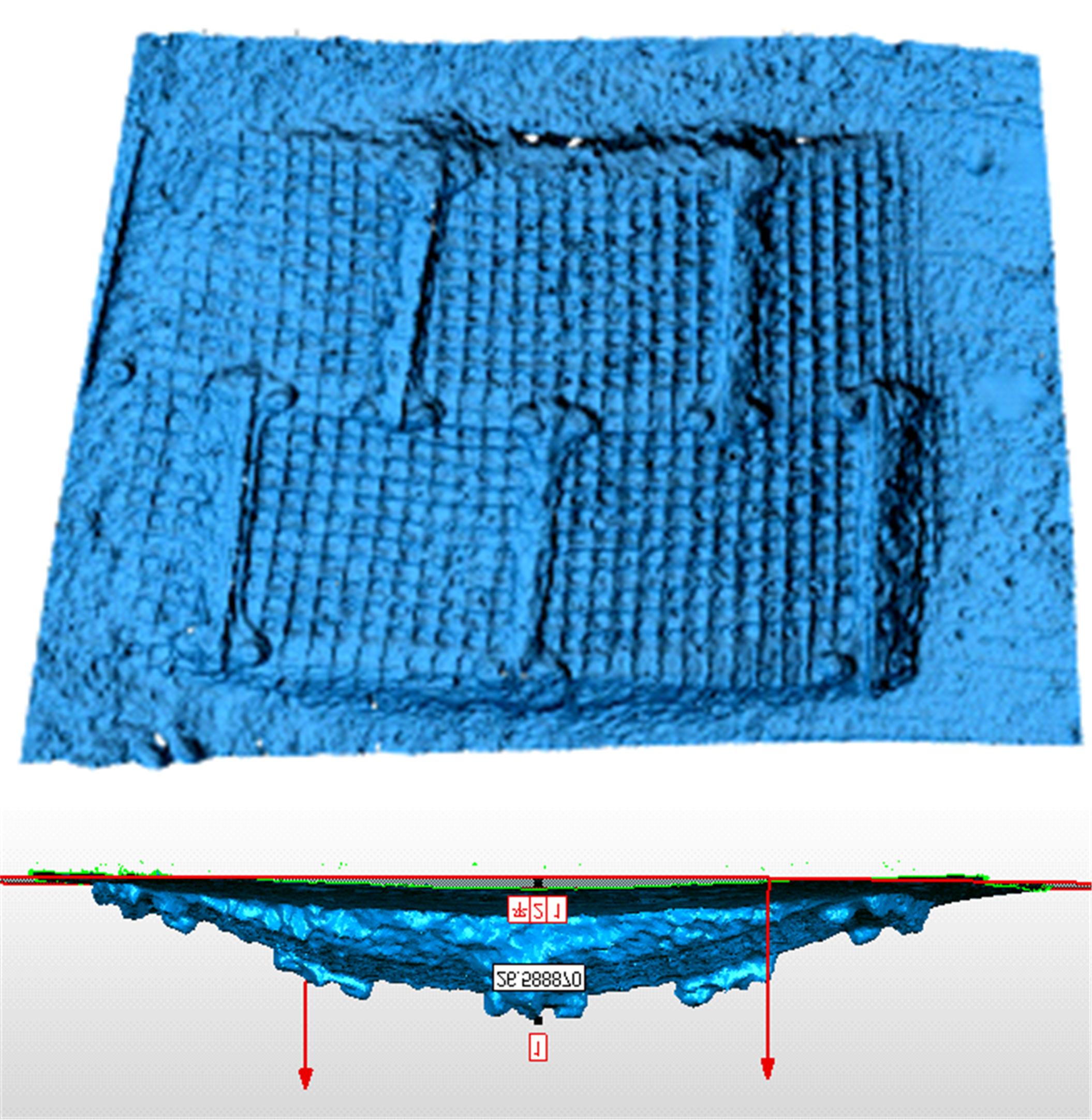
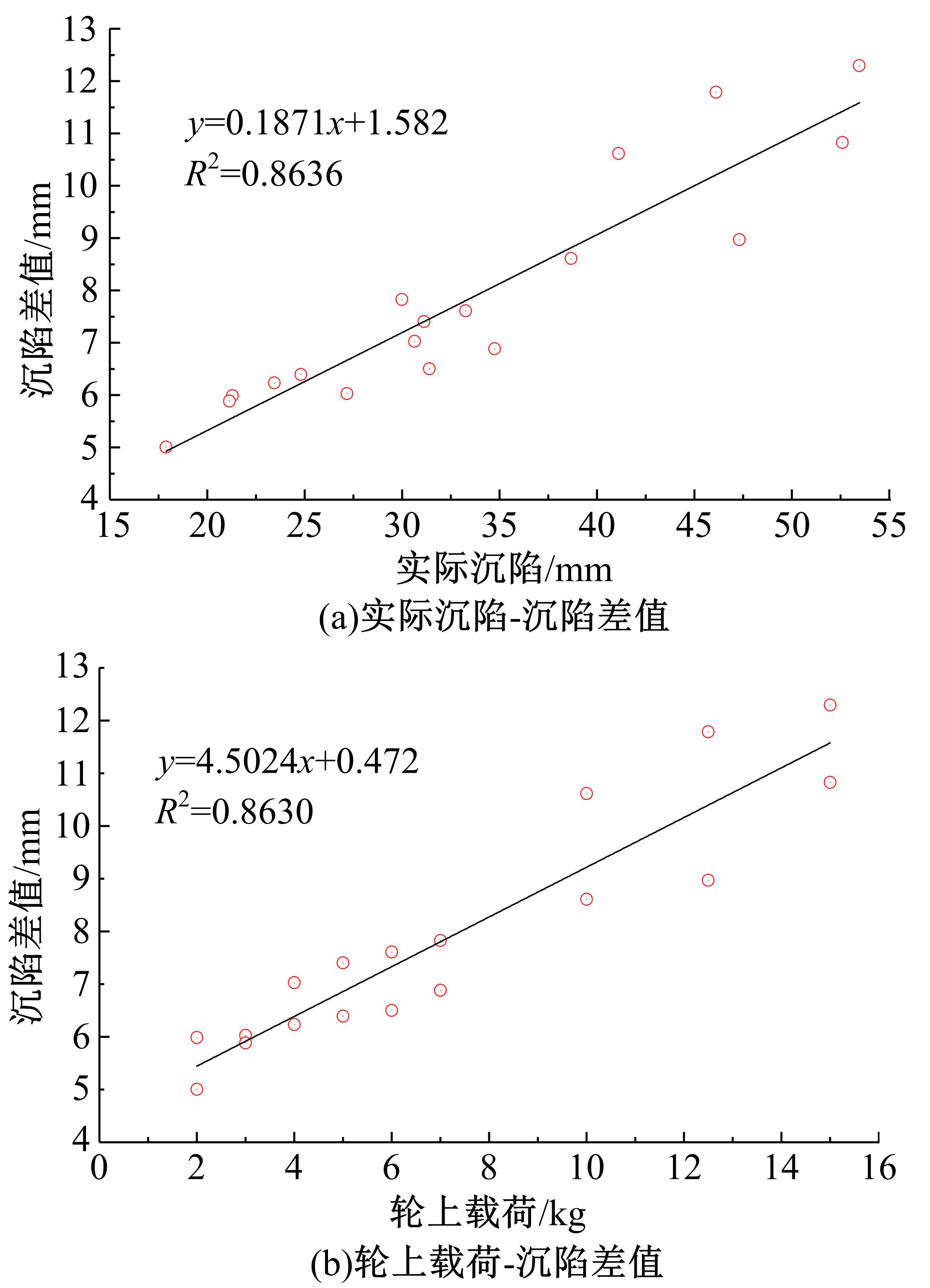
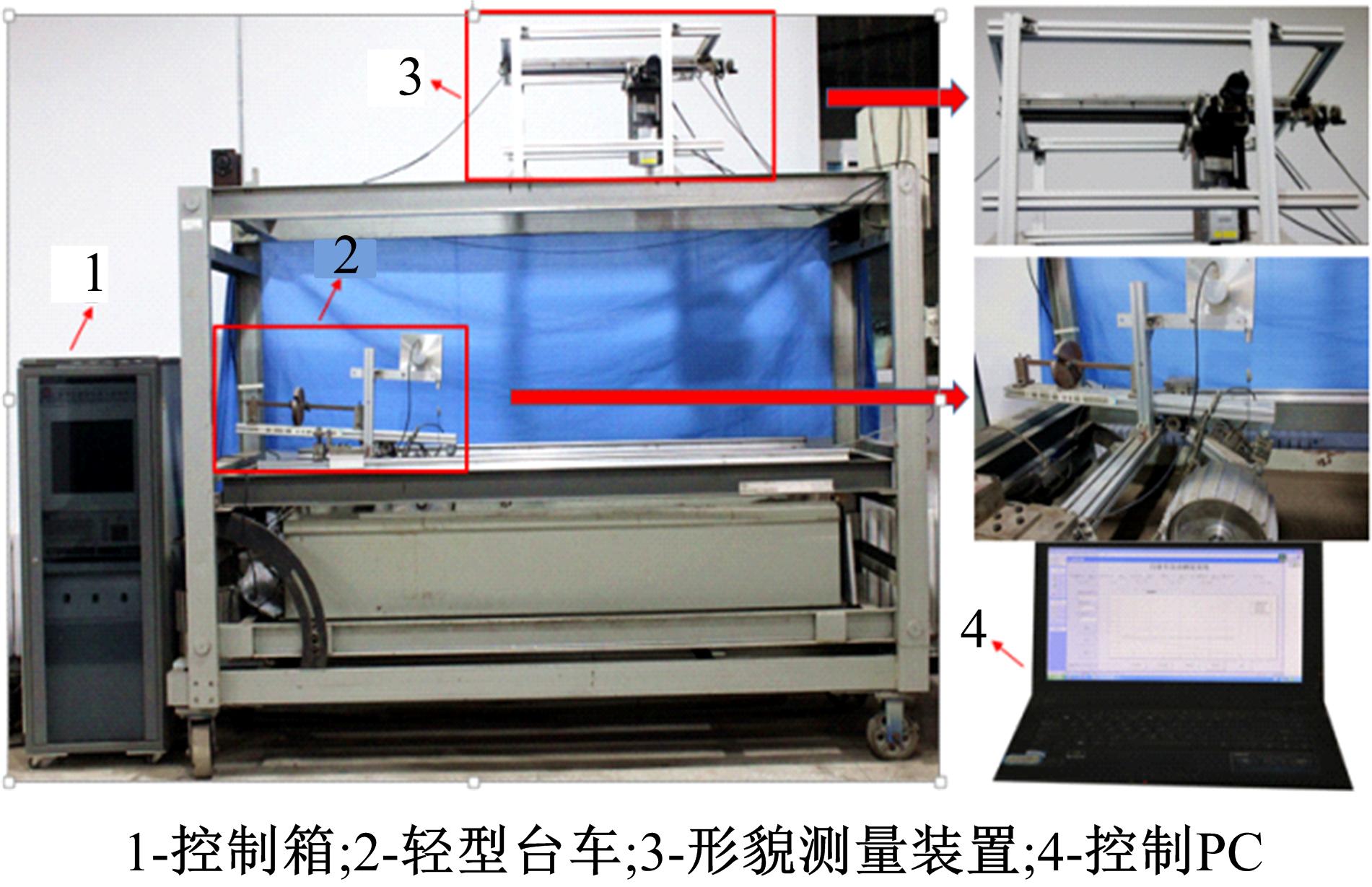
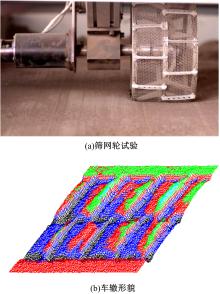
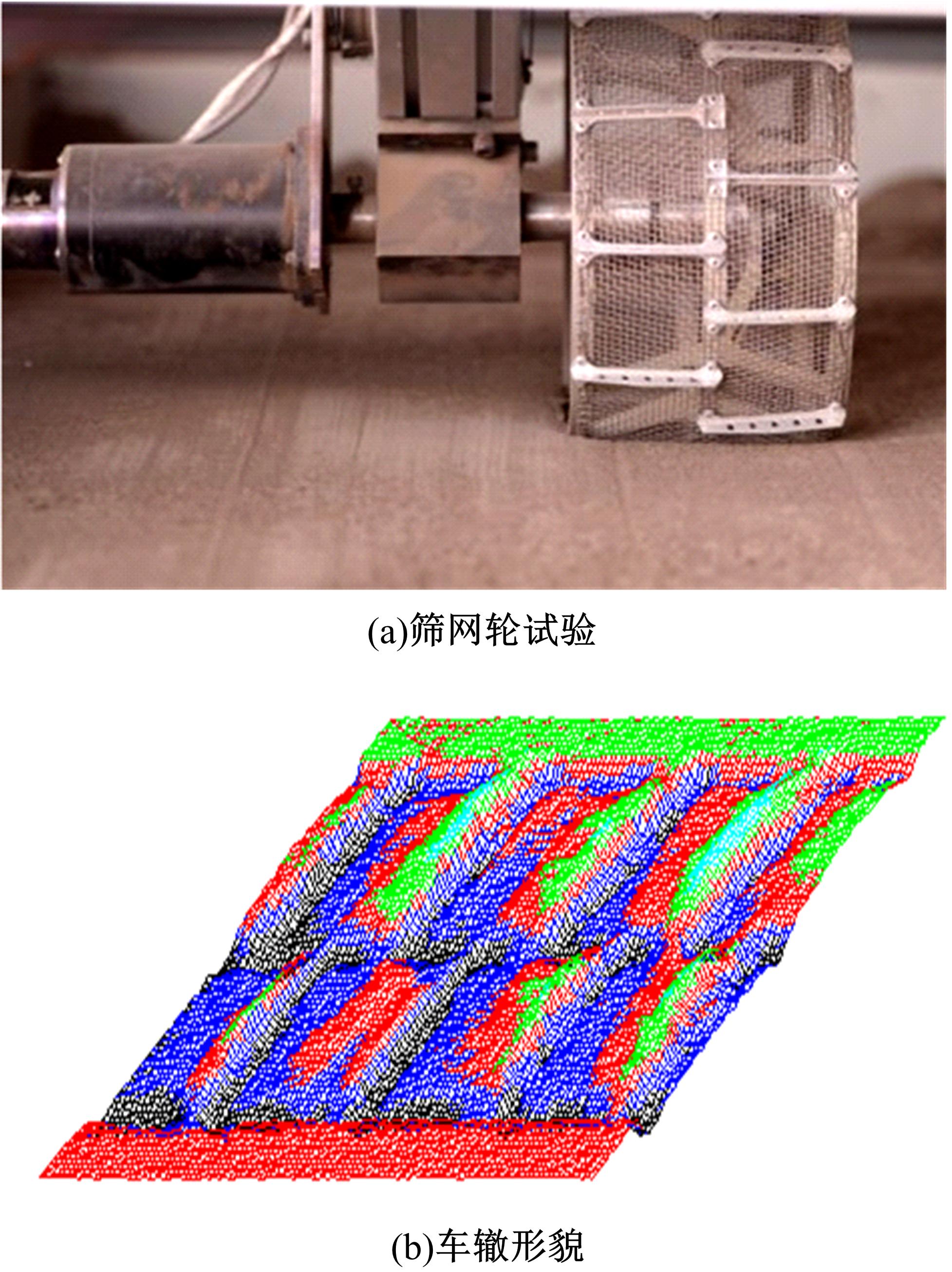
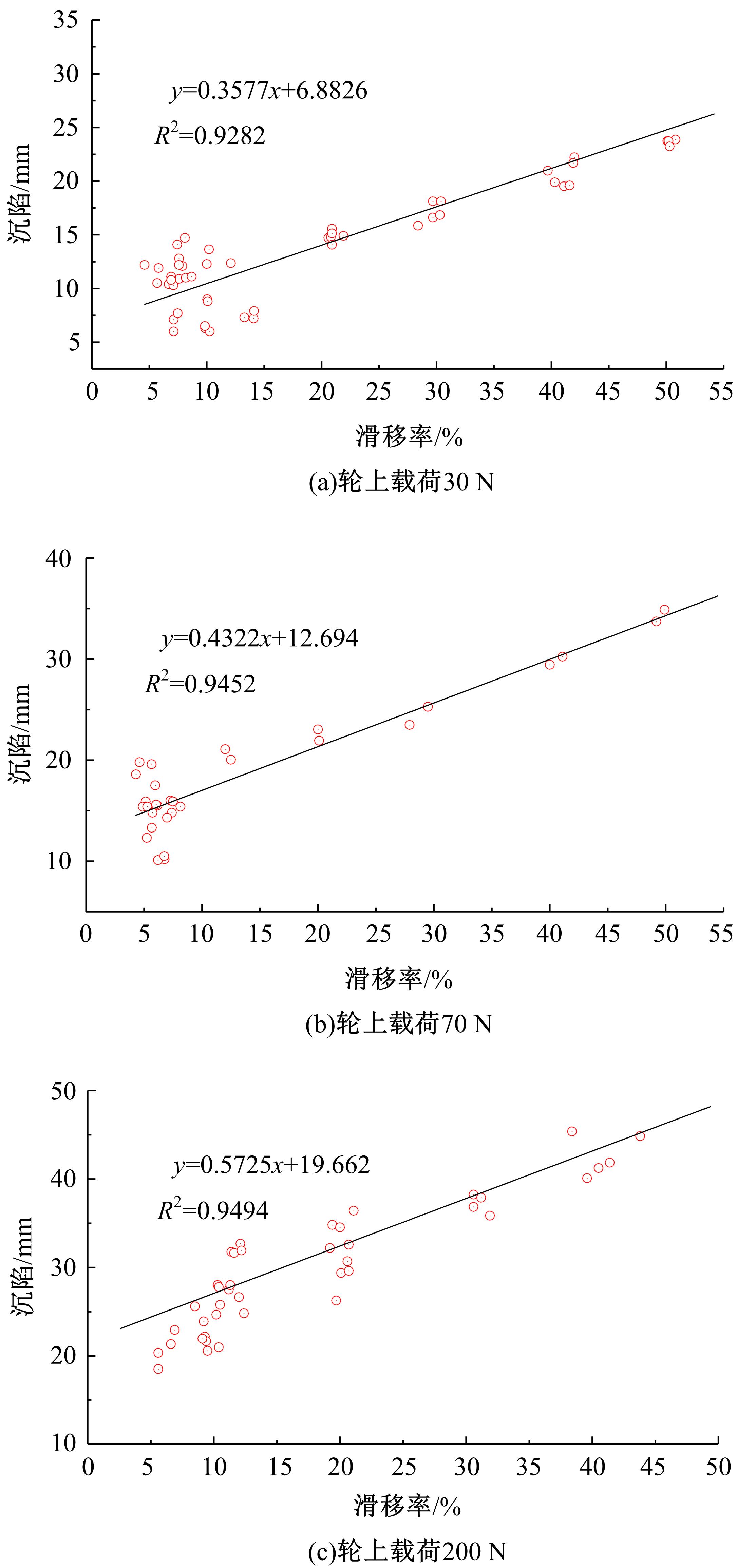
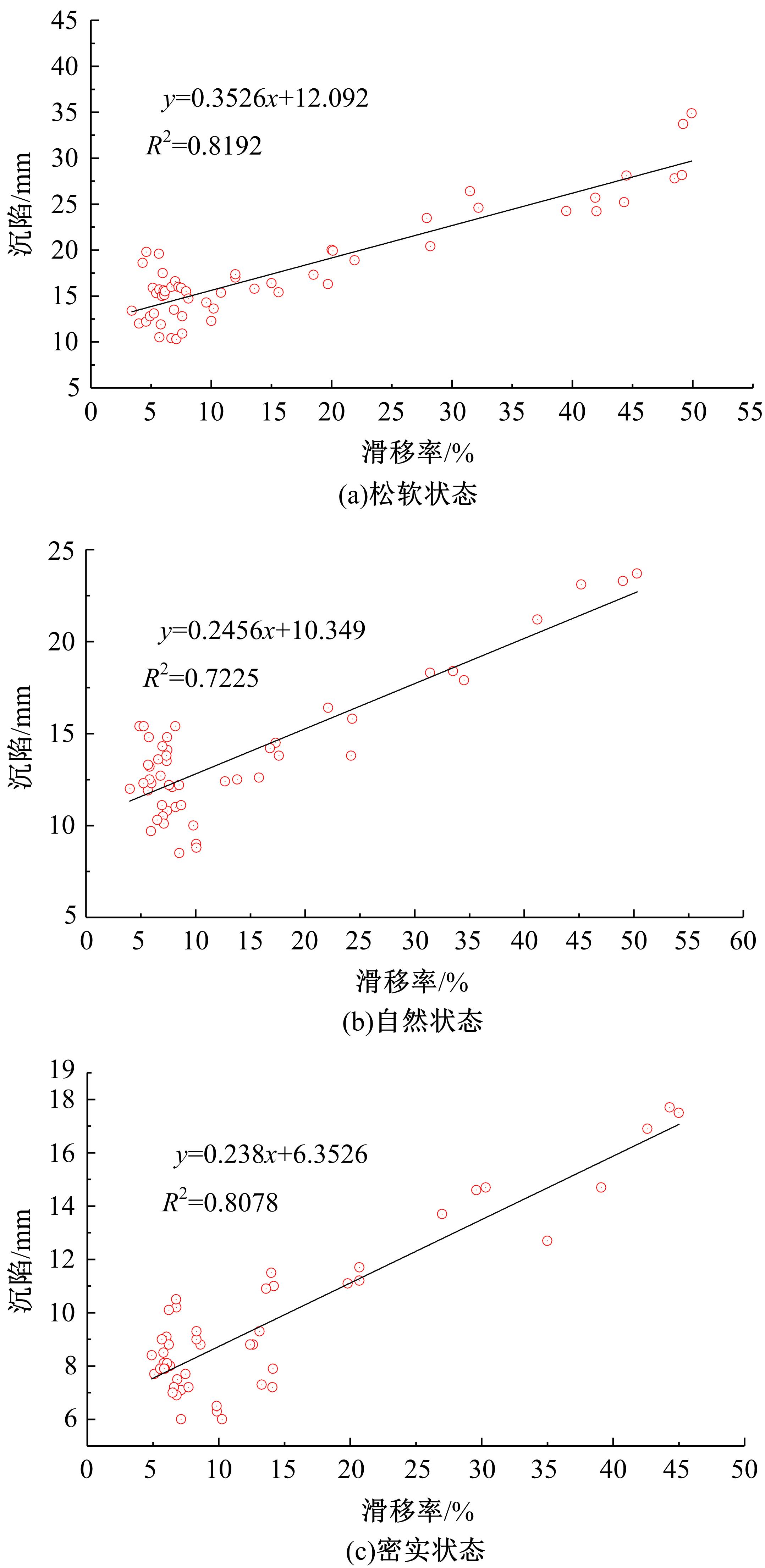
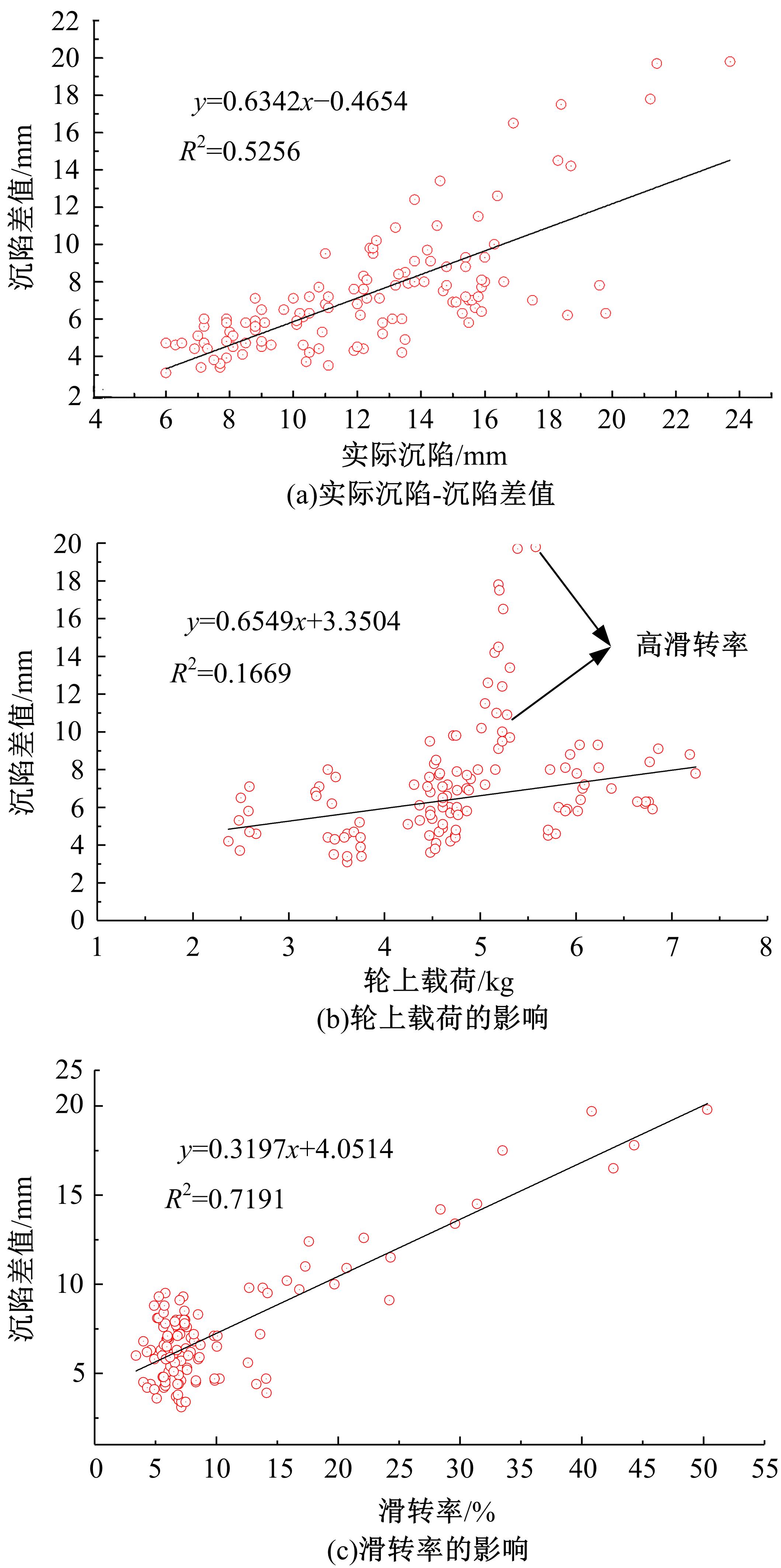
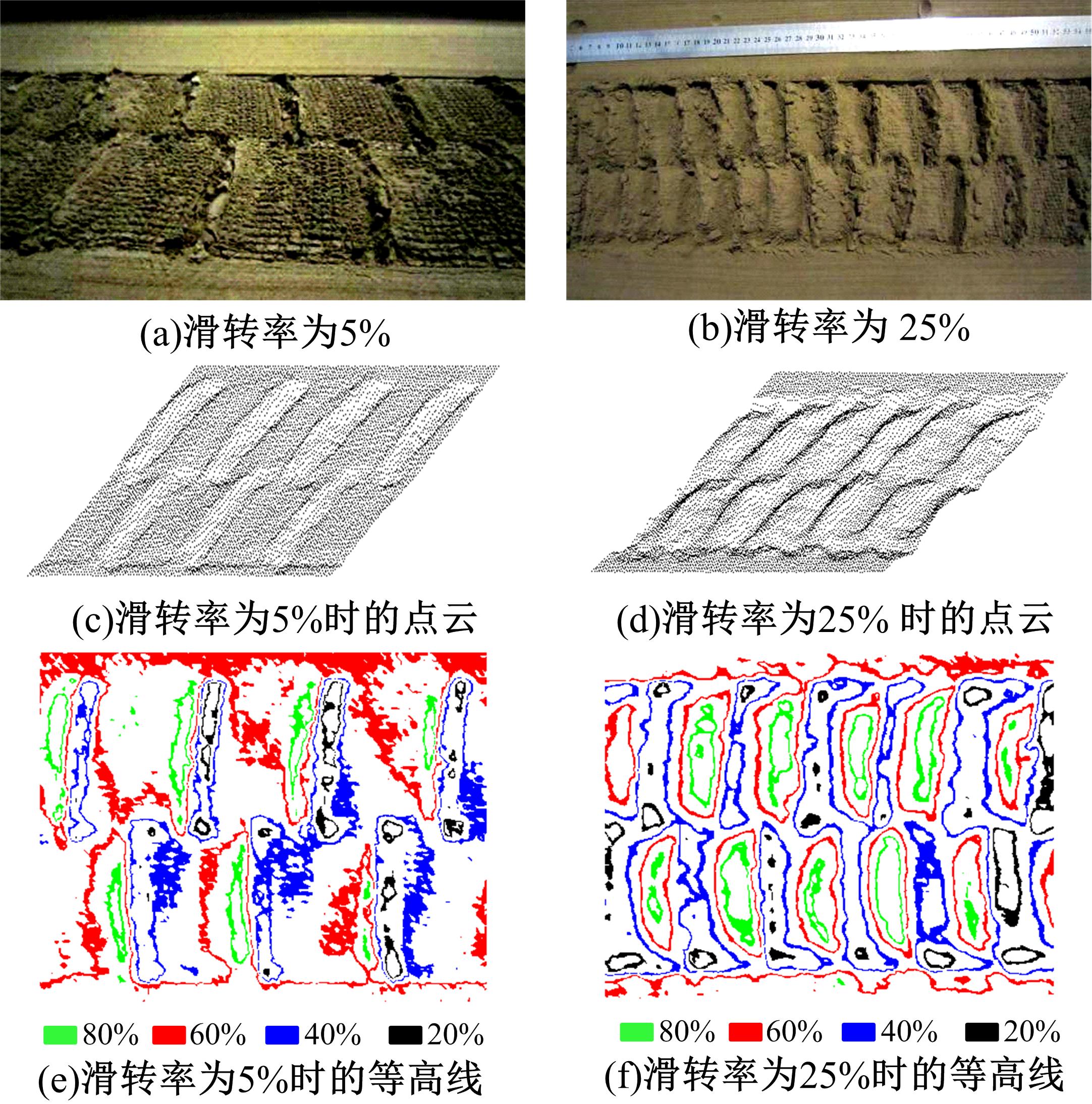
CE-3月球车在月面行驶时,车辙沉陷是判别其通过性的主要依据。本文通过土槽试验研究了CE-3月球车筛网轮的沉陷行为,试验结果表明:车轮表观沉陷量小于实际沉陷量,动态沉陷差值最大为19.8 mm,最小为3.7 mm,且沉陷差值随滑转率的增大而增大。根据试验数据,建立了预测沉陷差值的数学模型,并通过月球车内场试验进行验证,结果表明:模型3和模型4预测准确,精度分别为85%和84.5%。研究结果可为中国月球车通过性能评估、路径规划提供参考和依据。
中图分类号:
- V416








|
| [1] | 马芳武,倪利伟,吴量,聂家弘,徐广健. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报(工学版), 2019, 49(6): 1745-1755. |
| [2] | 陈鑫,阮新建,李铭,王宁,王佳宁,潘凯旋. 基于大涡模拟的离散格式改进方法及应用[J]. 吉林大学学报(工学版), 2019, 49(6): 1756-1763. |
| [3] | 何仁,涂琨. 基于温度补偿气隙宽度的电磁制动器[J]. 吉林大学学报(工学版), 2019, 49(6): 1777-1785. |
| [4] | 靳立强, 田端洋, 田浩, 刘蒙蒙. 汽车电子稳定系统制动增力辅助技术[J]. 吉林大学学报(工学版), 2019, 49(6): 1764-1776. |
| [5] | 李杰, 郭文翠, 赵旗, 谷盛丰. 基于车辆响应的路面不平度识别方法[J]. 吉林大学学报(工学版), 2019, 49(6): 1810-1817. |
| [6] | 管欣,金号,段春光,卢萍萍. 汽车行驶道路侧向坡度估计[J]. 吉林大学学报(工学版), 2019, 49(6): 1802-1809. |
| [7] | 王杨,宋占帅,郭孔辉,庄晔. 转动惯量试验台的惯性参数测量[J]. 吉林大学学报(工学版), 2019, 49(6): 1795-1801. |
| [8] | 刘巧斌,史文库,陈志勇,骆联盟,苏志勇,黄开军. 混合可靠性模型参数的核密度和引力搜索估计[J]. 吉林大学学报(工学版), 2019, 49(6): 1818-1825. |
| [9] | 庄蔚敏,刘洋,王鹏跃,施宏达,徐纪栓. 钢铝异质自冲铆接头剥离失效仿真[J]. 吉林大学学报(工学版), 2019, 49(6): 1826-1835. |
| [10] | 马芳武,韩露,周阳,王世英,蒲永锋. 采用聚乳酸复合材料的汽车零件多材料优化设计[J]. 吉林大学学报(工学版), 2019, 49(5): 1385-1391. |
| [11] | 高振海,孙天骏,何磊. 汽车纵向自动驾驶的因果推理型决策[J]. 吉林大学学报(工学版), 2019, 49(5): 1392-1404. |
| [12] | 张博,张建伟,郭孔辉,丁海涛,褚洪庆. 路感模拟用永磁同步电机电流控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1405-1413. |
| [13] | 王鹏宇,赵世杰,马天飞,熊晓勇,程馨. 基于联合概率数据关联的车用多传感器目标跟踪融合算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1420-1427. |
| [14] | 胡兴军,惠政,郭鹏,张扬辉,张靖龙,王靖宇,刘飞. 基于流固耦合的汽车气动特性[J]. 吉林大学学报(工学版), 2019, 49(5): 1414-1419. |
| [15] | 韩小健,赵伟强,陈立军,郑宏宇,刘阳,宗长富. 基于区域采样随机树的客车局部路径规划算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1428-1440. |
|