吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (6): 2207-2215.doi: 10.13229/j.cnki.jdxbgxb20210590
• 计算机科学与技术 • 上一篇
虚拟锚点高维坐标的非视距识别及定位优化
孙大洋1( ),王雪莹1,韩双雪1,钟辉2(),戴江南3
),王雪莹1,韩双雪1,钟辉2(),戴江南3
- 1.吉林大学 通信工程学院,长春 130012
2.吉林大学 大数据和网络管理中心,长春 130012
3.吉林大学 软件学院,长春 130012
Non⁃line⁃of⁃sight identification and optimization based on virtual coordinates of anchors
Da-yang SUN1(),Xue-ying WANG1,Shuang-xue HAN1,Hui ZHONG2(),Jiang-nan DAI3
- 1.College of Communication Engineering,Jilin University,Changchun 130012,China
2.Management Center of Big Data and Network,Jilin University,Changchun 130012,China
3.College of Software,Jilin University,Changchun 130012,China
摘要:
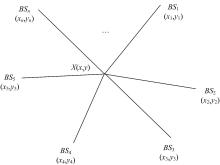
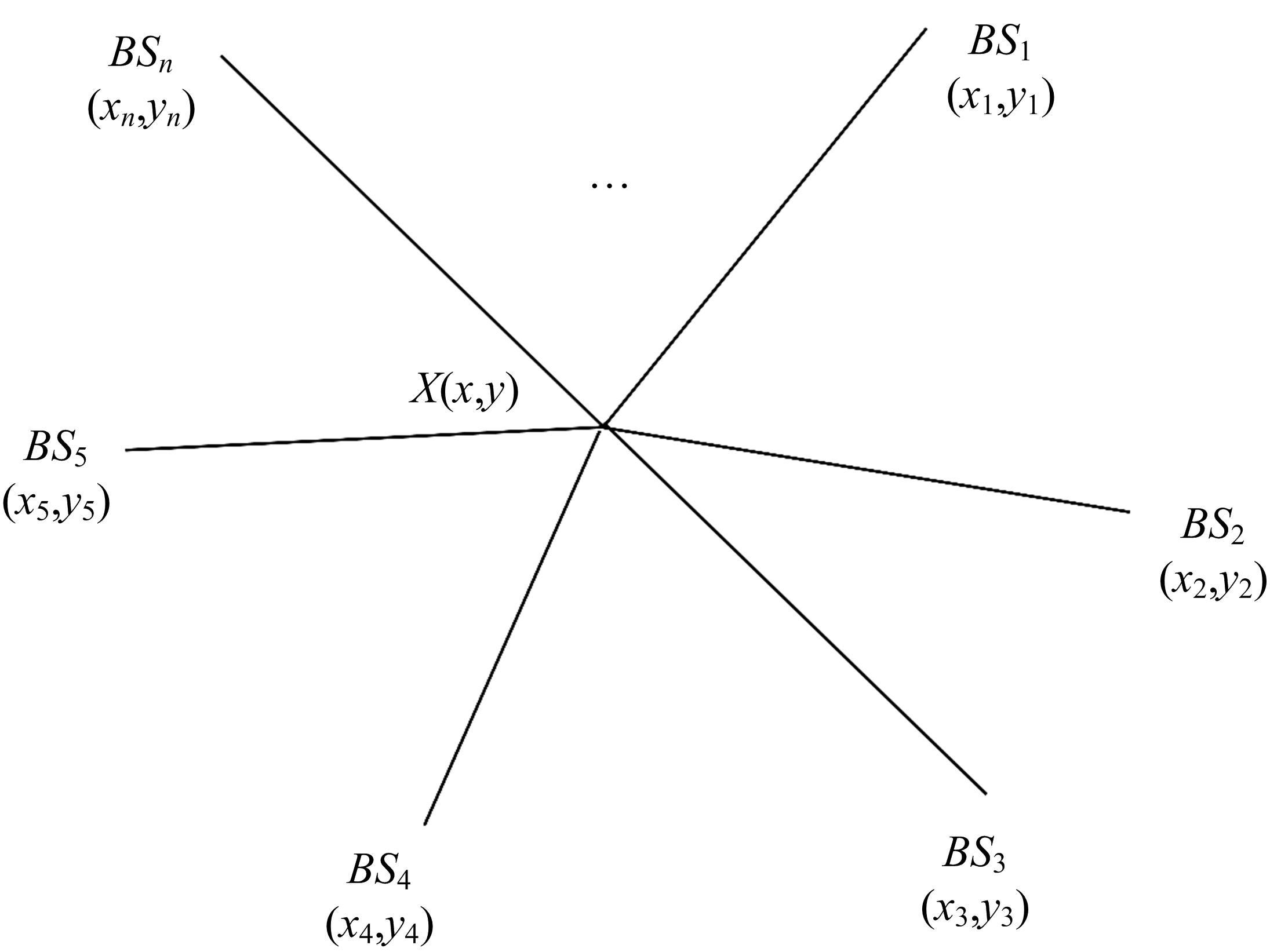
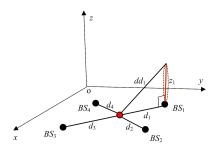
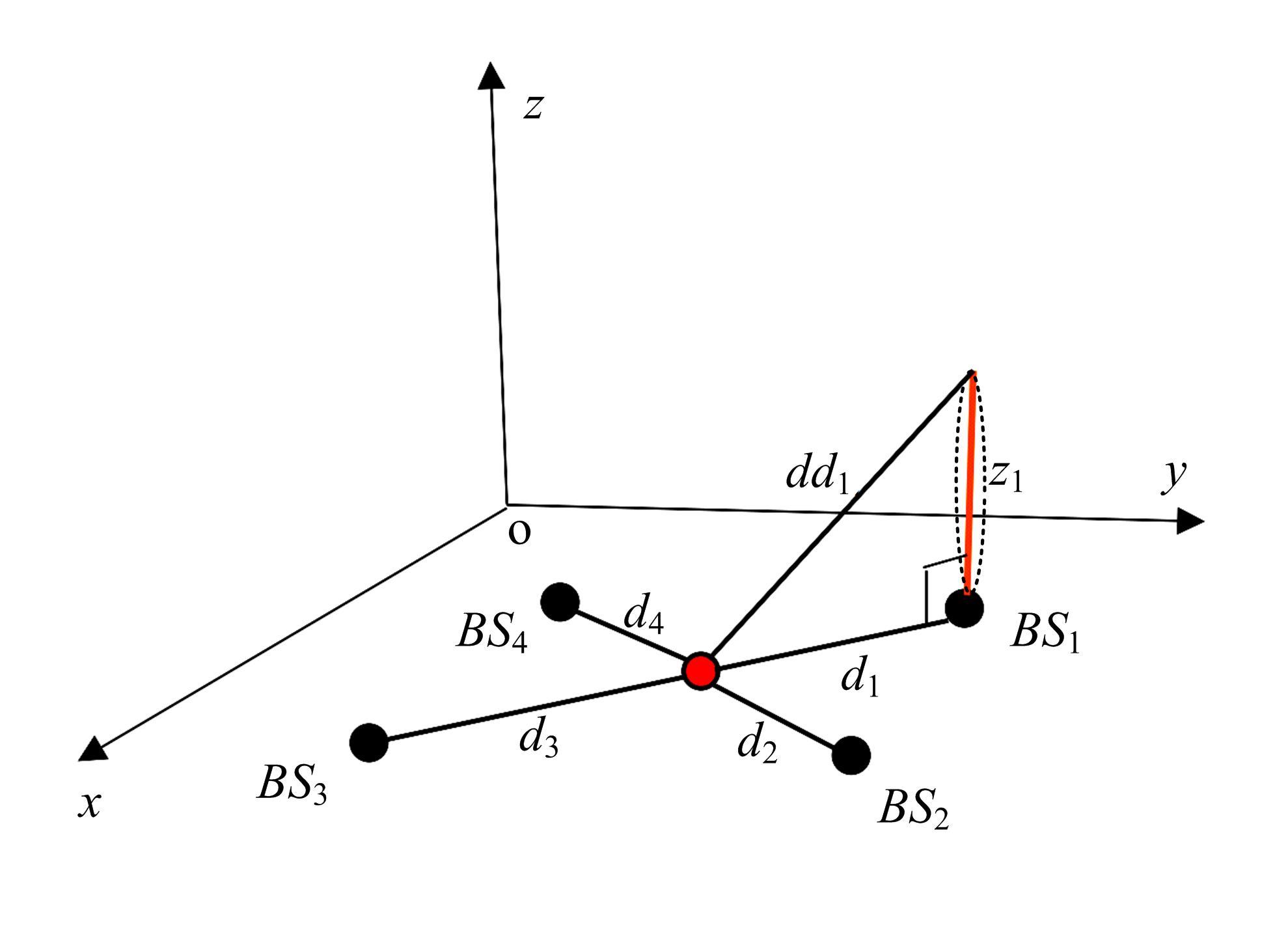
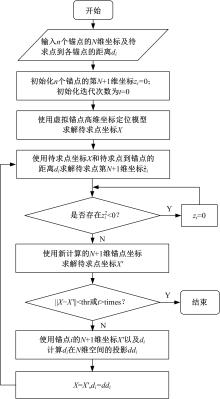
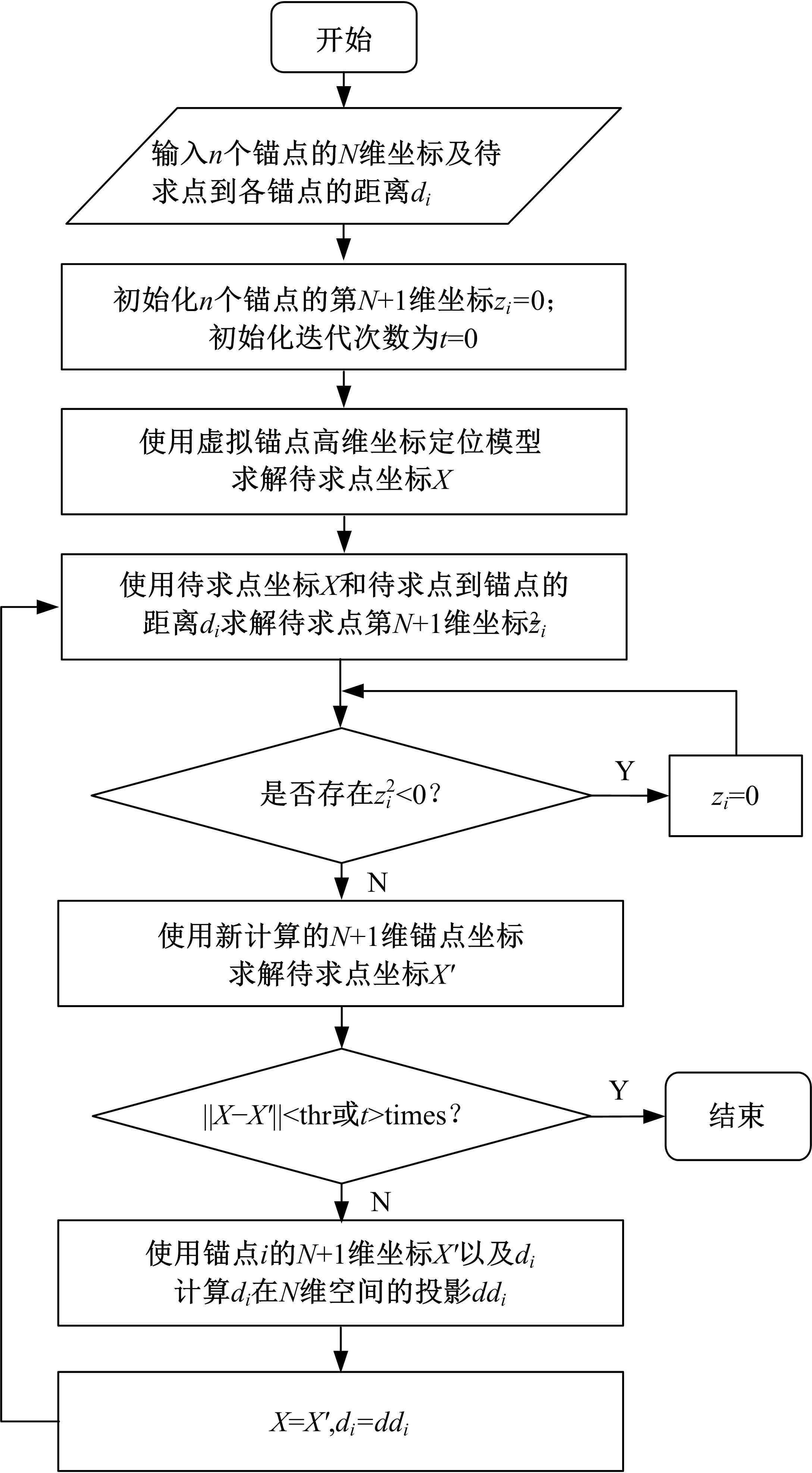
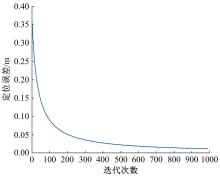
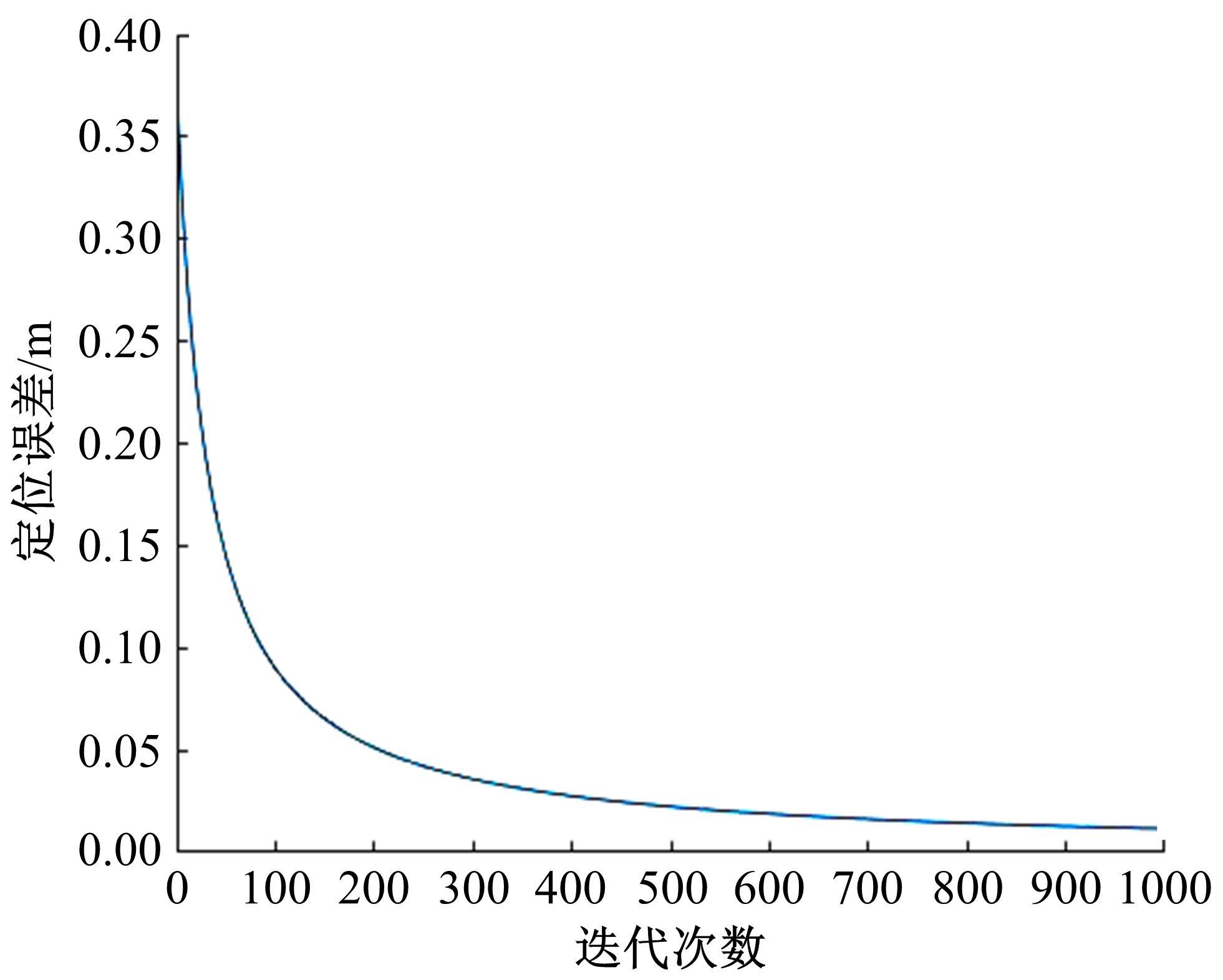
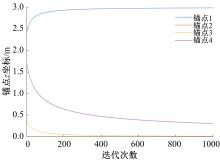
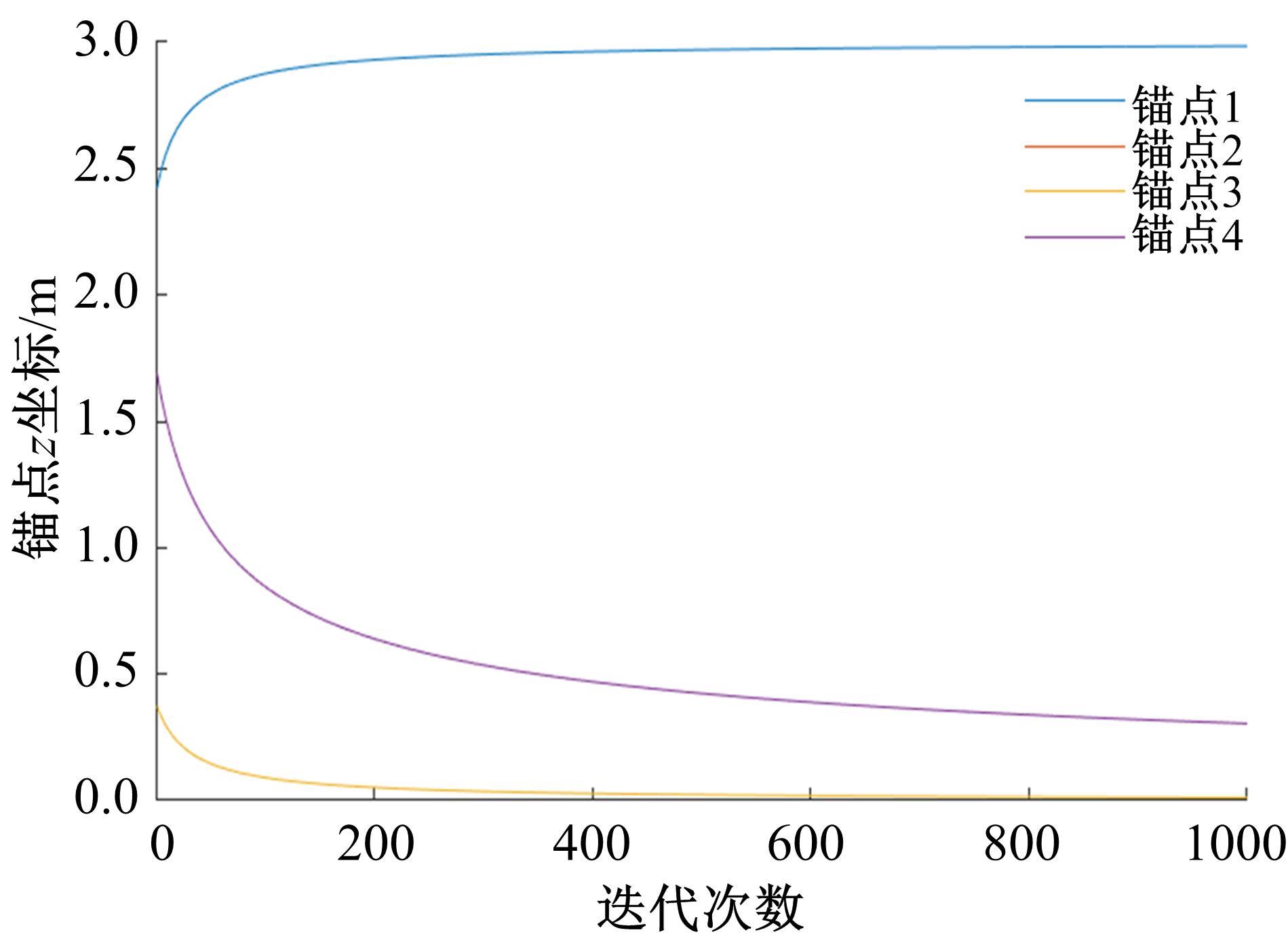
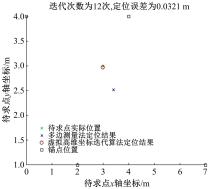
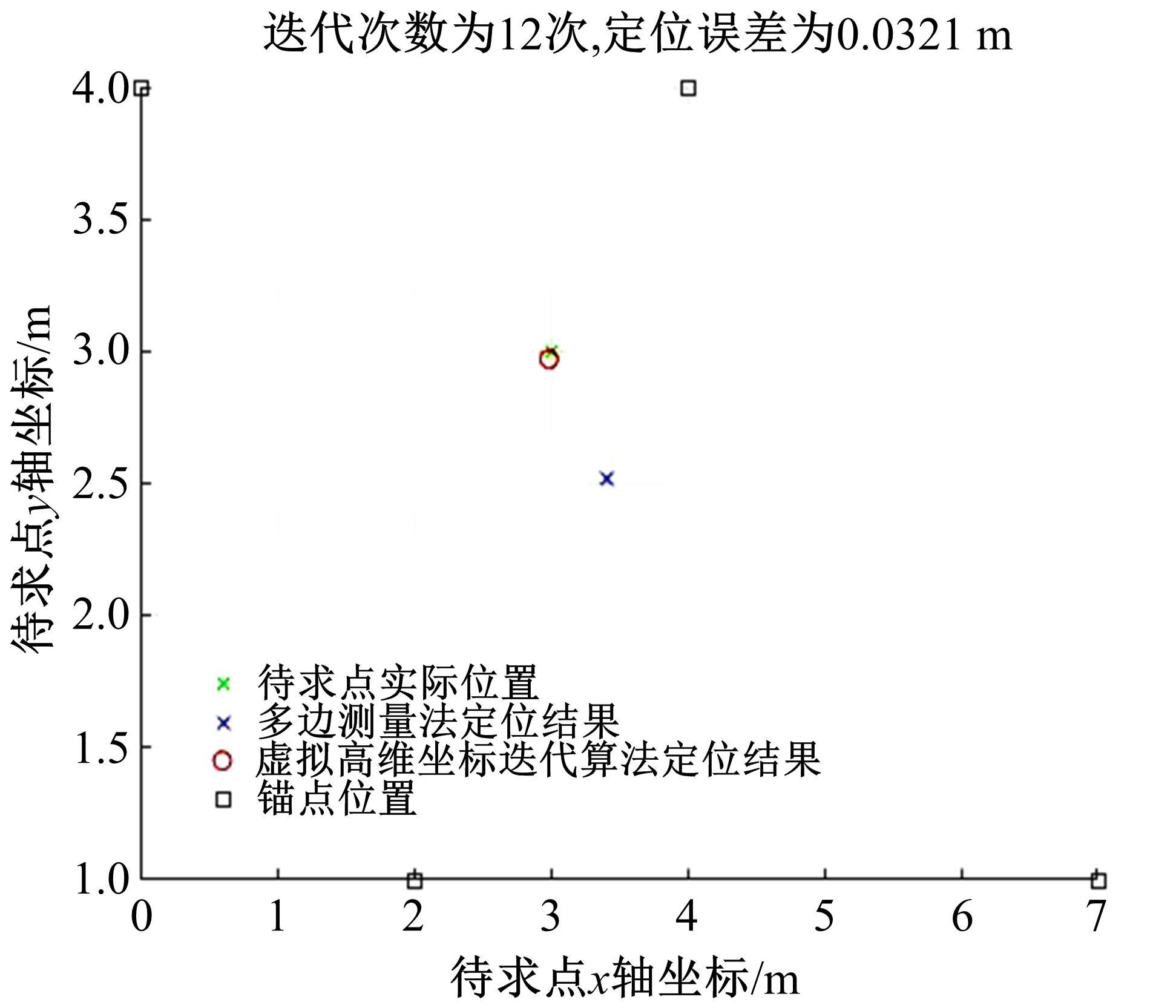
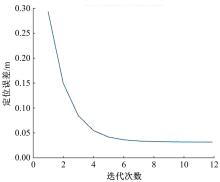
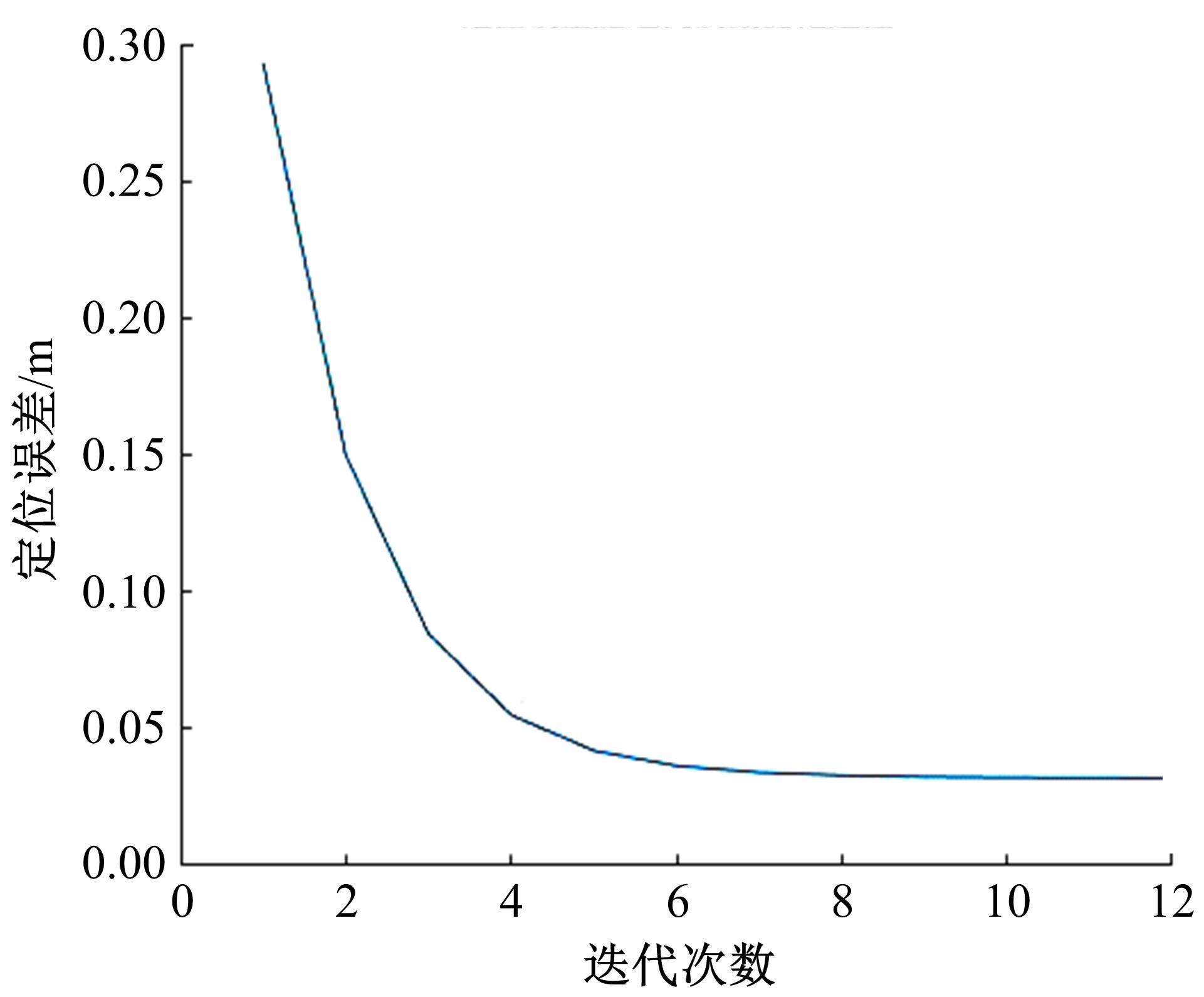
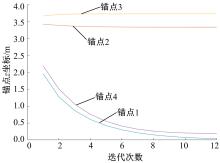
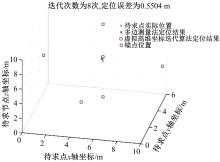
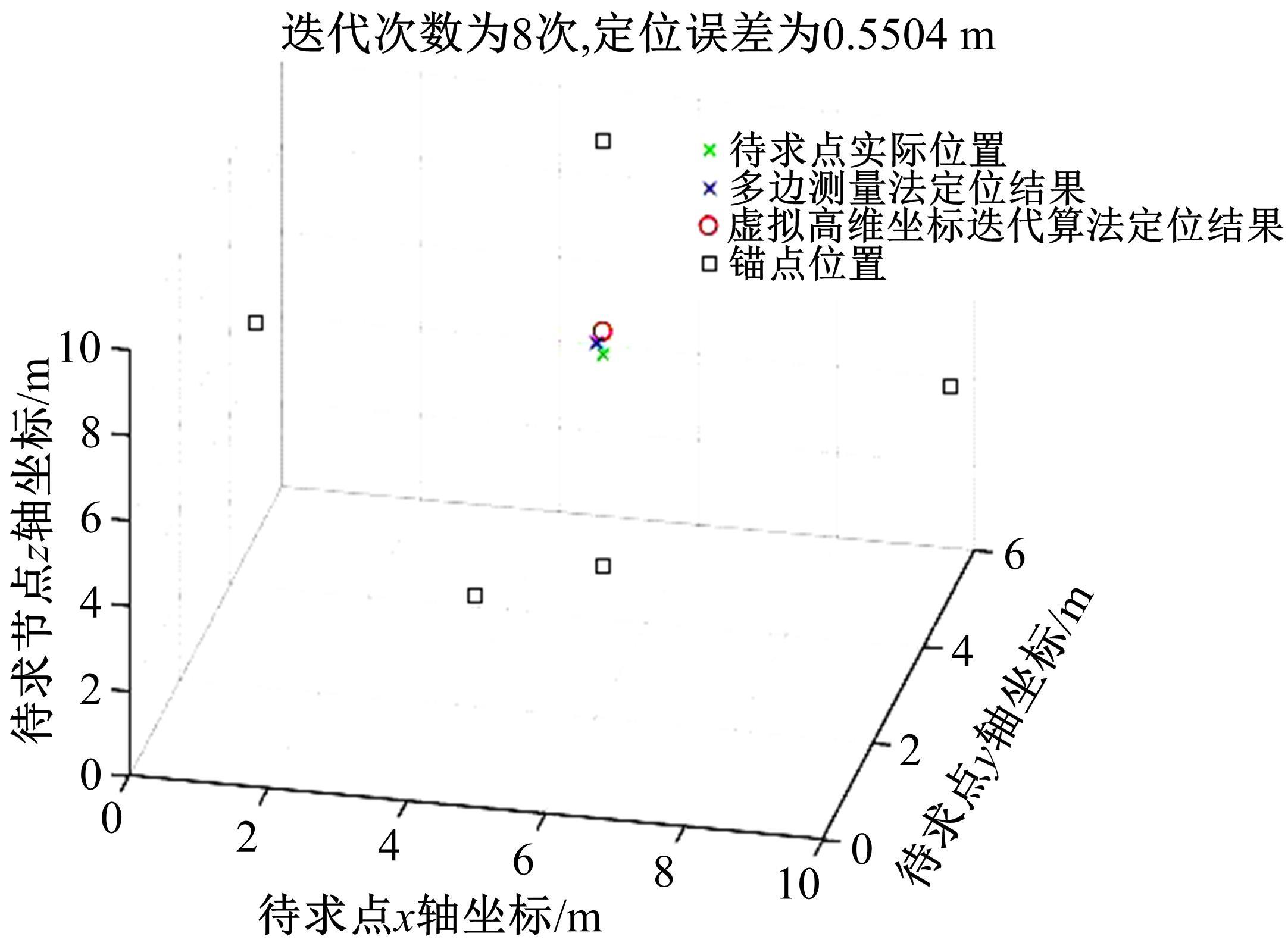
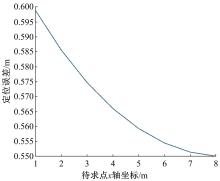
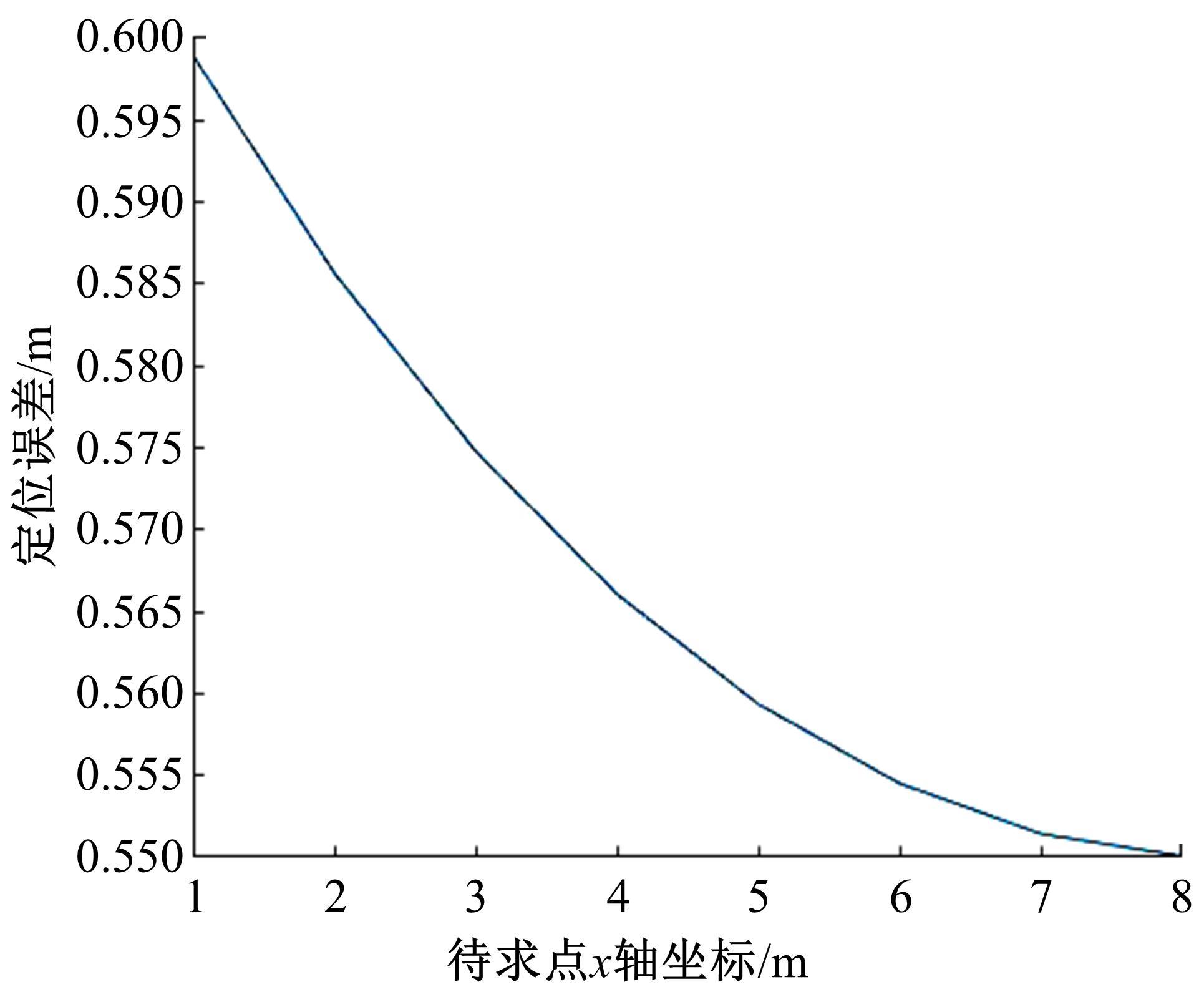
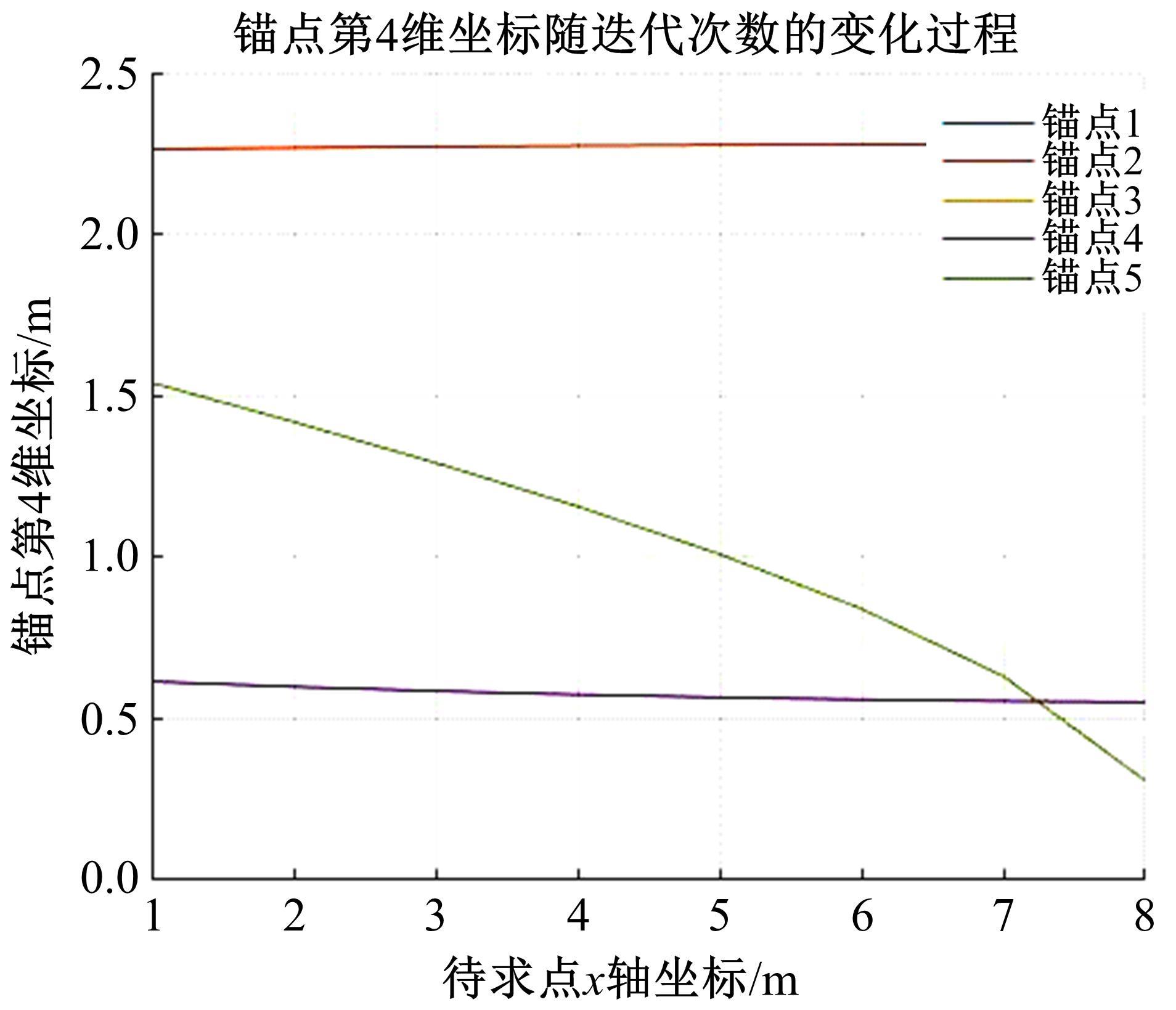
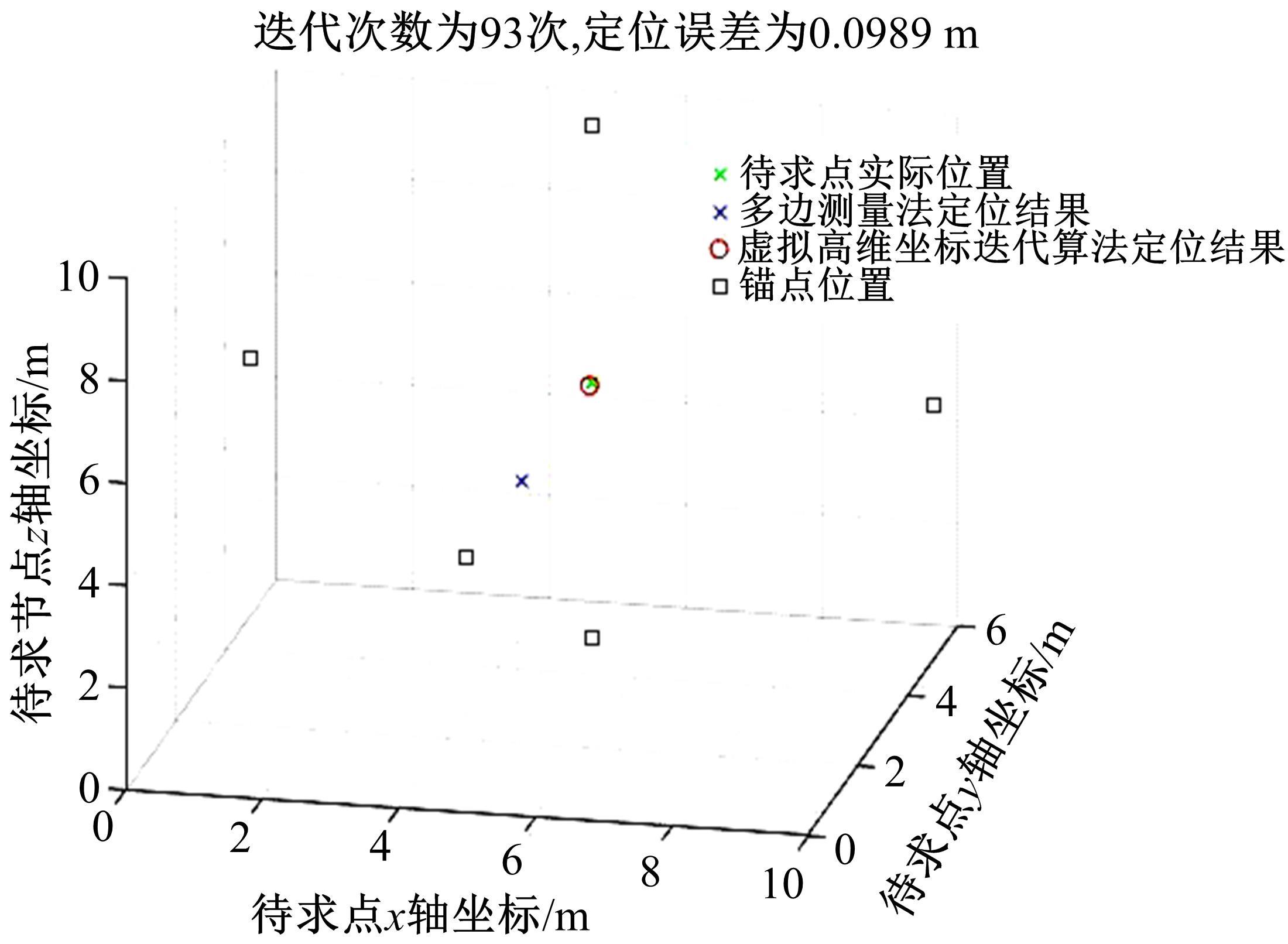
通过虚拟锚点高维坐标的方式对非视距误差进行识别,并减弱其对定位精度的影响。在N维空间中,虚拟引入锚点的第N+1维坐标,以锚点N+1维坐标为基准对非视距测量值进行修正,再以修正值求解锚点第N+1维坐标,通过迭代优化待求点的定位结果。本文对虚拟锚点高维坐标的非视距识别及定位优化方法进行了多组实验,结果表明,通过虚拟引入锚点高维分量可以识别一个或多个非视距误差,通过迭代修正的方式可有效提高定位的精度。
中图分类号:
- TP39

| 1 | 孙大洋,章荣炜,李赞. 室内定位技术综述[J].无人系统技术, 2020, 3(3): 32-46. |
| Sun Da-yang, Zhang Rong-wei, Li Zan. Survey of indoor localization[J]. Unmanned Systems Technology, 2020, 3(3): 32-46. | |
| 2 | Zhao S H, Zhang X P, Cui X W, et al. A new toa localization and synchronization system with virtually synchronized periodic asymmetric ranging network[J]. IEEE Internet of Things Journal, 2021, 8(11): 9030-9044. |
| 3 | Deng Z L, Zheng X Y, Zhang C Y, et al. A tdoa and pdr fusion method for 5g indoor localization based on virtual base stations in unknown areas[J]. IEEE Access, 2020, 8:225123-225133. |
| 4 | Ma Y T, Wang B B, Pei S Y, et al. An indoor localization method based on AOA and PDOA using virtual stations in multipath and NLOS environments for passive UHF RFID[J]. IEEE Access, 2018, 6: 31772-31782. |
| 5 | 刘富, 权美静, 王柯, 等. 仿蝎子振源定位机理的位置指纹室内定位方法[J]. 吉林大学学报: 工学版, 2019, 49(6): 2076-2082. |
| Liu Fu, Quan Mei-jing, Wang Ke, et al. Indoor positioning method based on location fingerprinting of imitating mechanism of scorpion vibration source[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2076-2082. | |
| 6 | Cheng L, Wu H, Wu C D, et al. Indoor mobile localization in wireless sensor network under unknown NLOS errors[J]. International Journal of Distributed Sensor Networks, 2013,9(2): 4338-4348. |
| 7 | Momtaz A A, Behnia F, Amiri R, et al. NLOS identification in range-based source localization: Statistical approach[J]. IEEE Sensors Journal, 2018, 18(9): 3745-3751. |
| 8 | Yang X F. NLOS mitigation for UWB localization based on sparse pseudo input Gaussian process[J]. IEEE Sensors Journal, 2018, 18(10): 4311-4316. |
| 9 | Ma Y T, Wang B B, Pei S Y, et al. An indoor localization method based on AOA and PDOA using virtual stations in multipath and NLOS environments for passive UHF RFID[J]. IEEE Access, 2018, 6: 31772-31782. |
| 10 | Shrivastava A, Bharti P. Localization techniques in wireless sensor networks[J]. International Journal of Computer Applications, 2015,116(12):13-18. |
| 11 | Choi J S, Lee W H, Lee J H, et al. Deep learning based NLOS identification with commodity WLAN devices[J]. IEEE Transactions on Vehicular Technology, 2018, 67(4): 3295-3303. |
| 12 | Ramadan M, Sark V, Gutierrez J,et al. NLOS identification for indoor localization using random forest algorithm[C]∥In Proc 22nd Int ITG Workshop Smart Antennas, Bochum, Germany, 2018:1-5. |
| 13 | 肖竹, 宋宝相, 孙宛, 等. 基于UWB定位误差统计特性分析的NLOS鉴别[J]. 吉林大学学报: 工学版, 2010, 40(5): 1381-1385. |
| Xiao Zhu, Song Bao-Xiang, Sun Wan, et al. NLOS identification based on statistic analysis of UWB localization error[J]. Journal of Jilin University(Engineering and Technology Edition), 2010, 40(5): 1381-1385. | |
| 14 | Jiang C H, Shen J C, Chen S, et al. UWB NLOS/LOS classification using deep learning method[J]. IEEE Communications Letters, 2020, 24(10): 2226-2230. |
| 15 | Zhu Y H, Ma T F, Li Z J, et al. NLOS identification and correction based on multidimensional scaling and quasi-accurate detection[J]. IEEE Access, 2019, 7: 53977-53987. |
| 16 | Mass-Sanchez J, Vargas-Rosales C, Ruiz-Ibarra E, et al. Localization based on probabilistic multilateration approach for mobile wireless sensor networks[J]. IEEE Access, 2020, 8: 54994-55011. |
| [1] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [2] | 刘毅,肖玲玲,王改静,张武军. 基于联合优化的D2D资源分配算法[J]. 吉林大学学报(工学版), 2020, 50(1): 306-314. |
| [3] | 王金鹏,叶政鹏,曹帆,邹念育. 5G移动通信中基于同频干扰分布的协同分布式天线传输系统[J]. 吉林大学学报(工学版), 2020, 50(1): 333-341. |
| [4] | 李翠然,于永生,谢健骊. 基于次用户优先级的频谱共享动态博弈算法[J]. 吉林大学学报(工学版), 2020, 50(1): 315-323. |
| [5] | 刘富, 权美静, 王柯, 刘云, 康冰, 韩志武, 侯涛. 仿蝎子振源定位机理的位置指纹室内定位方法[J]. 吉林大学学报(工学版), 2019, 49(6): 2076-2082. |
| [6] | 李文军,华强,谭立东,孙悦. DV⁃HOP和接收信号强度指示结合的改进算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1689-1695. |
| [7] | 王洪雁,房云飞,朱圣棋,裴炳南. 非均匀噪声条件下考虑互耦效应的DOA估计方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1706-1714. |
| [8] | 刘勇,邓方顺,刘小林,闵思婕,王鹏. 基于双混沌振子的最小频移键控信号频率估计方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1357-1362. |
| [9] | 王宏志,姜方达,周明月. 基于遗传粒子群优化算法的认知无线电系统功率分配[J]. 吉林大学学报(工学版), 2019, 49(4): 1363-1368. |
| [10] | 周彦果,张海林,陈瑞瑞,周韬. 协作网络中采用双层博弈的资源分配方案[J]. 吉林大学学报(工学版), 2018, 48(6): 1879-1886. |
| [11] | 孙晓颖, 扈泽正, 杨锦鹏. 基于分层贝叶斯网络的车辆发动机系统电磁脉冲敏感度评估[J]. 吉林大学学报(工学版), 2018, 48(4): 1254-1264. |
| [12] | 董颖, 崔梦瑶, 吴昊, 王雨后. 基于能量预测的分簇可充电无线传感器网络充电调度[J]. 吉林大学学报(工学版), 2018, 48(4): 1265-1273. |
| [13] | 丁宁, 常玉春, 赵健博, 王超, 杨小天. 基于USB 3.0的高速CMOS图像传感器数据采集系统[J]. 吉林大学学报(工学版), 2018, 48(4): 1298-1304. |
| [14] | 牟宗磊, 宋萍, 翟亚宇, 陈晓笑. 分布式测试系统同步触发脉冲传输时延的高精度测量方法[J]. 吉林大学学报(工学版), 2018, 48(4): 1274-1281. |
| [15] | 陈瑞瑞, 张海林. 三维毫米波通信系统的性能分析[J]. 吉林大学学报(工学版), 2018, 48(2): 605-609. |
|
||