吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 832-840.doi: 10.13229/j.cnki.jdxbgxb20220425
• 通信与控制工程 • 上一篇
多无人机地面移动目标搜寻和定位
徐卓君1( ),王耀祥1,黄兴1,彭程2
),王耀祥1,黄兴1,彭程2
- 1.吉林大学 通信工程学院,长春 130022
2.中国科学院 长春光学精密机械与物理研究所,长春 130033
Ground moving target search and location with multi⁃unmanned aerial vehicles
Zhuo-jun XU1(),Yao-xiang WANG1,Xing HUANG1,Cheng PENG2
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China
摘要:
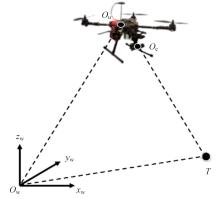
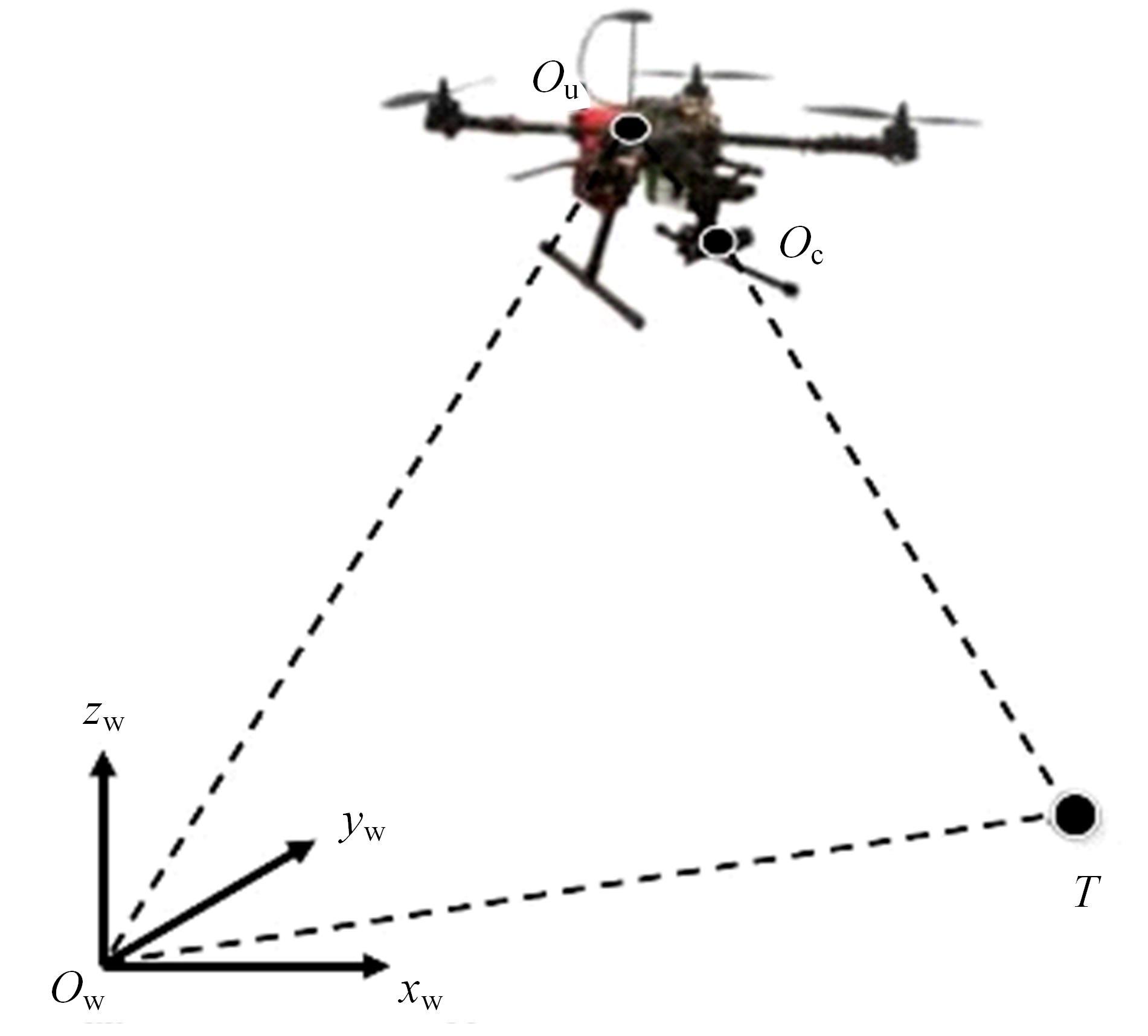
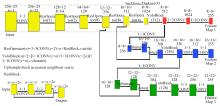
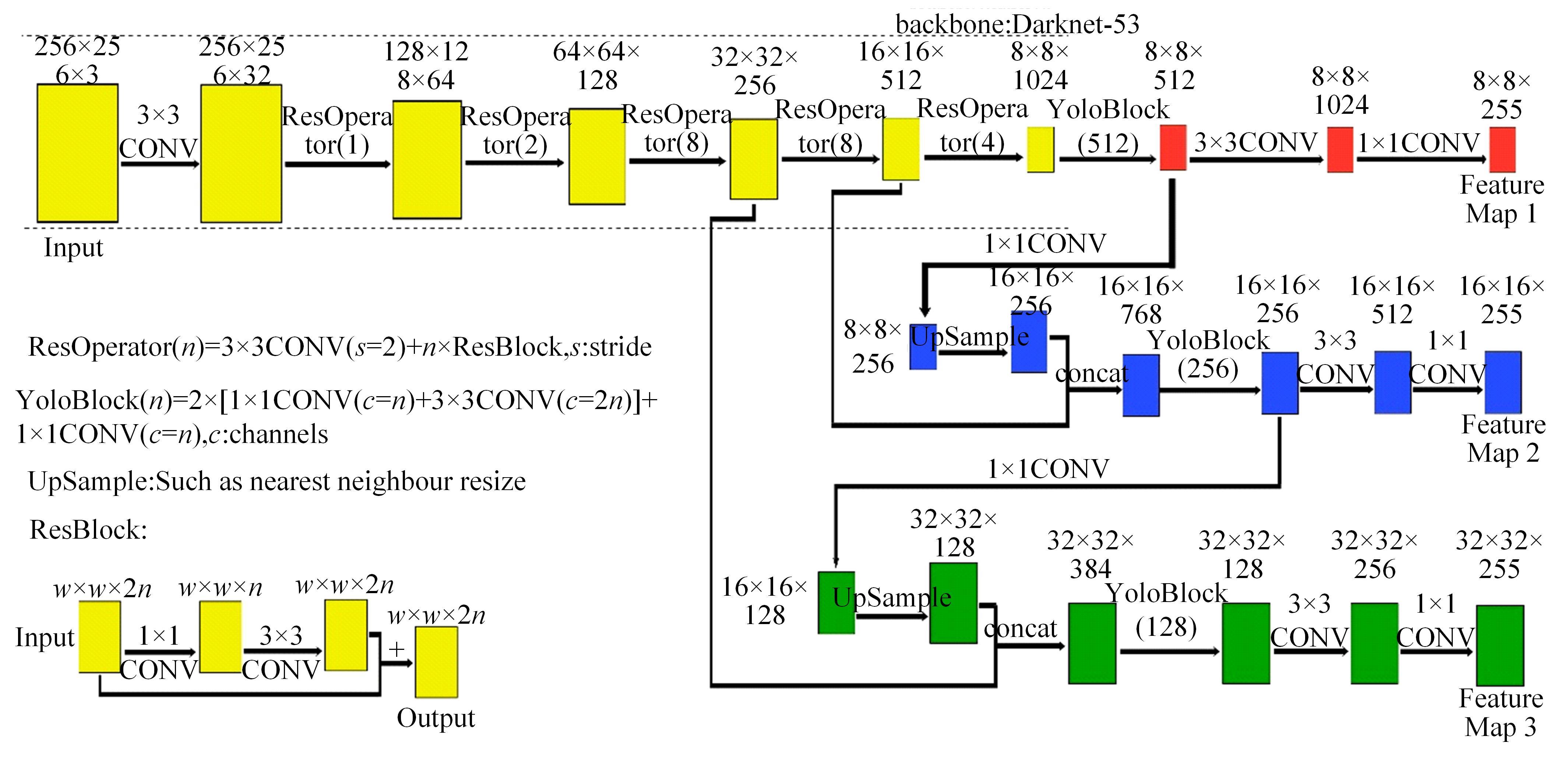
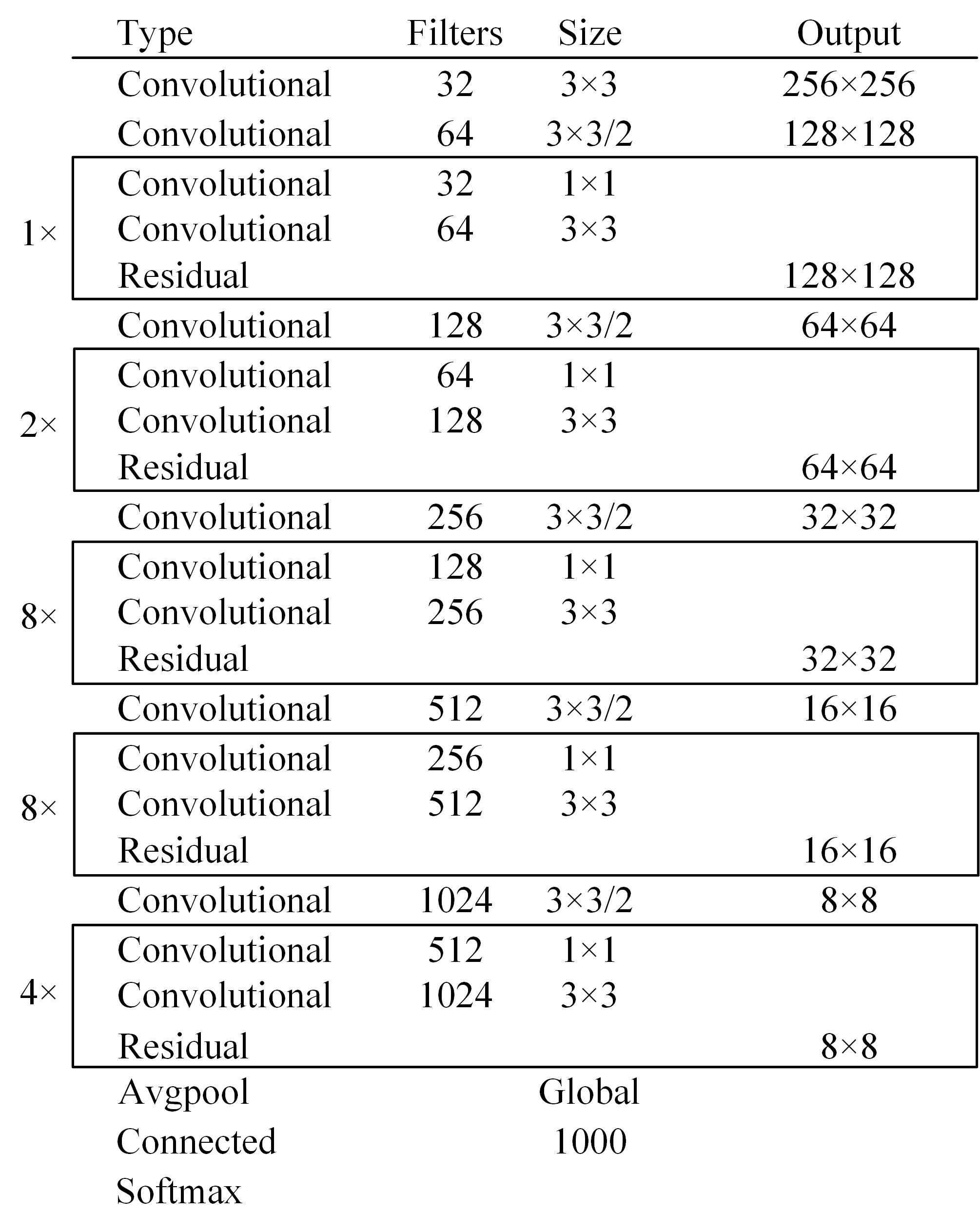
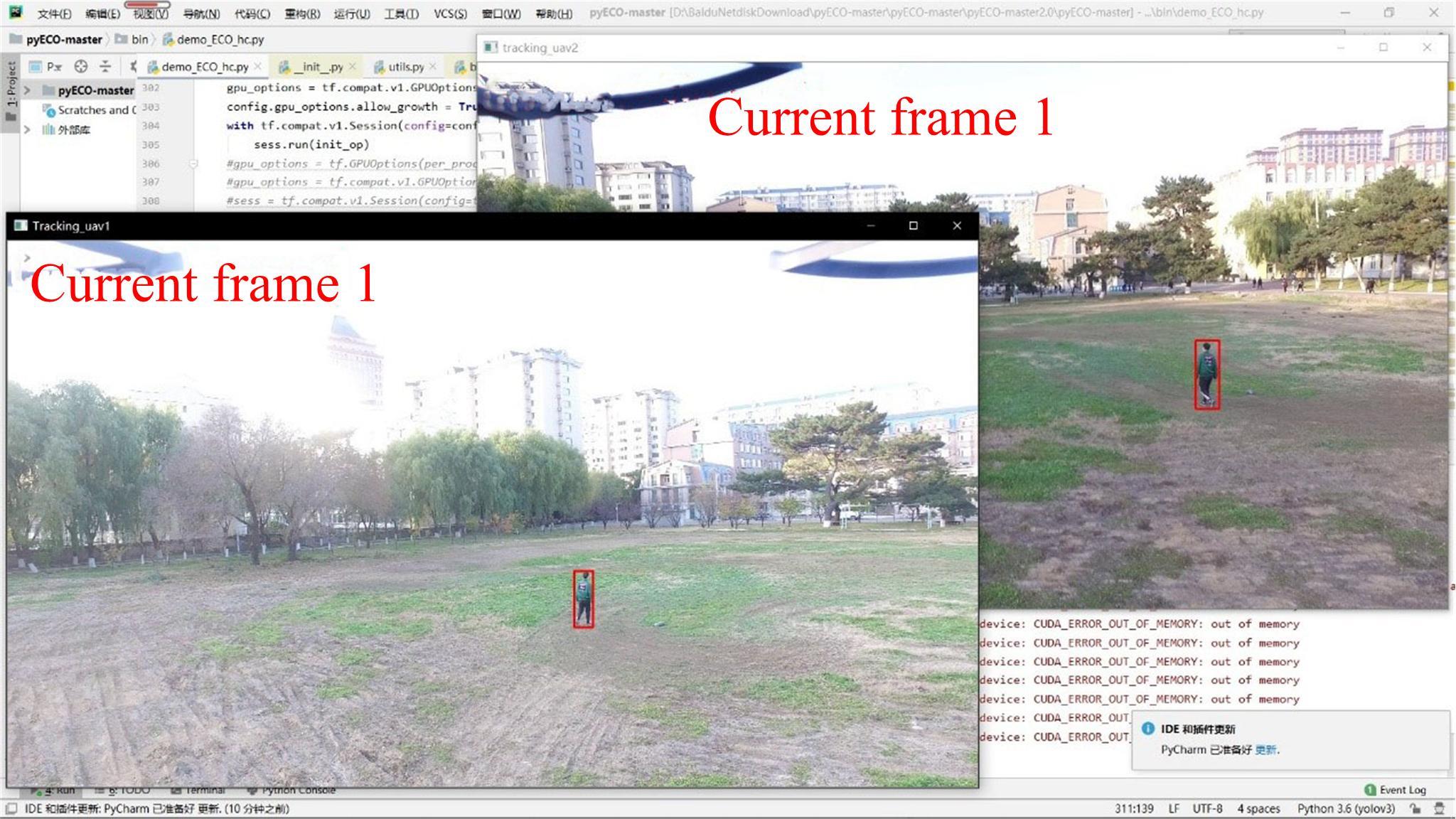
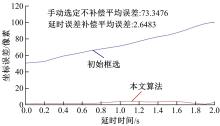
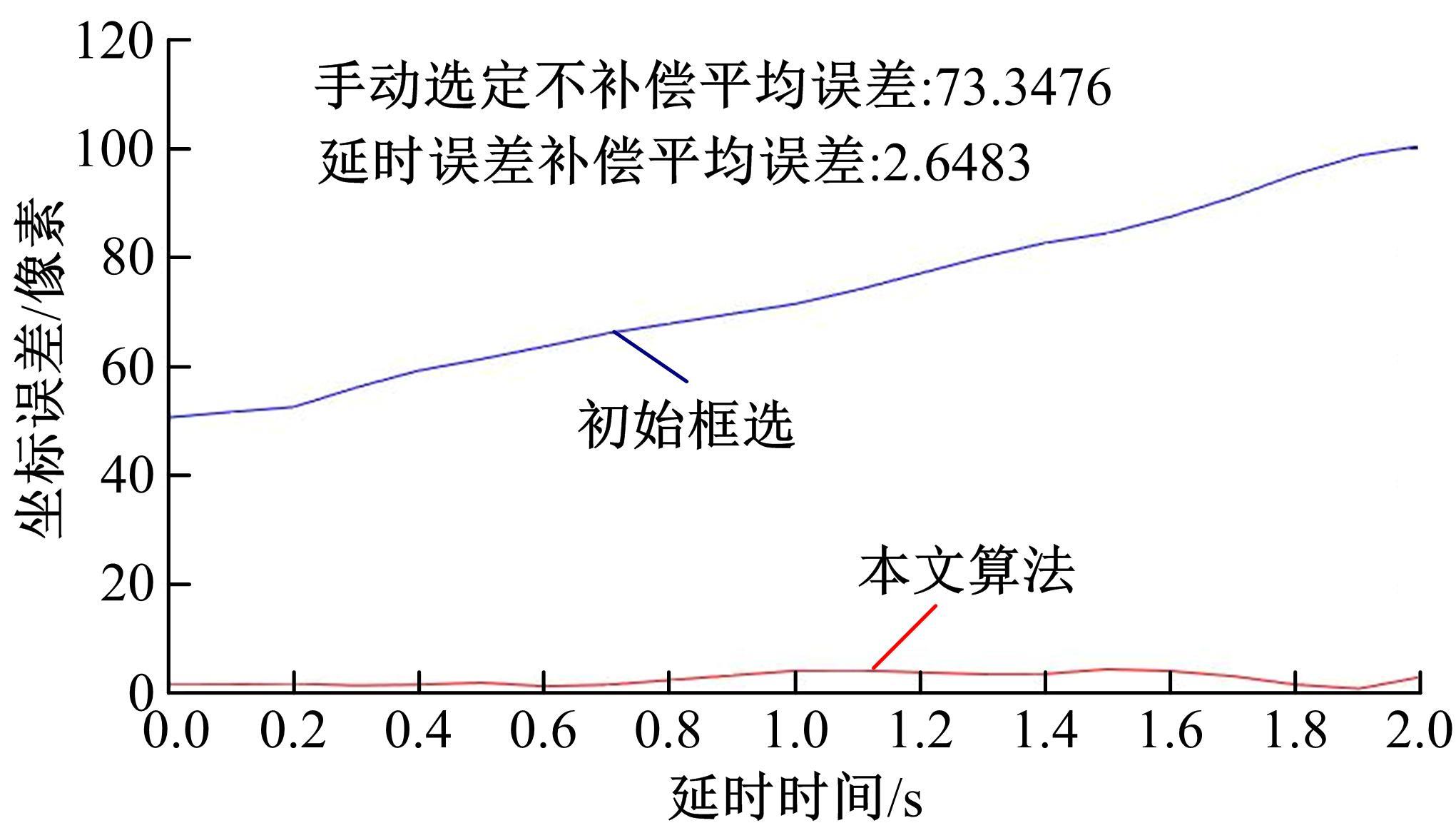
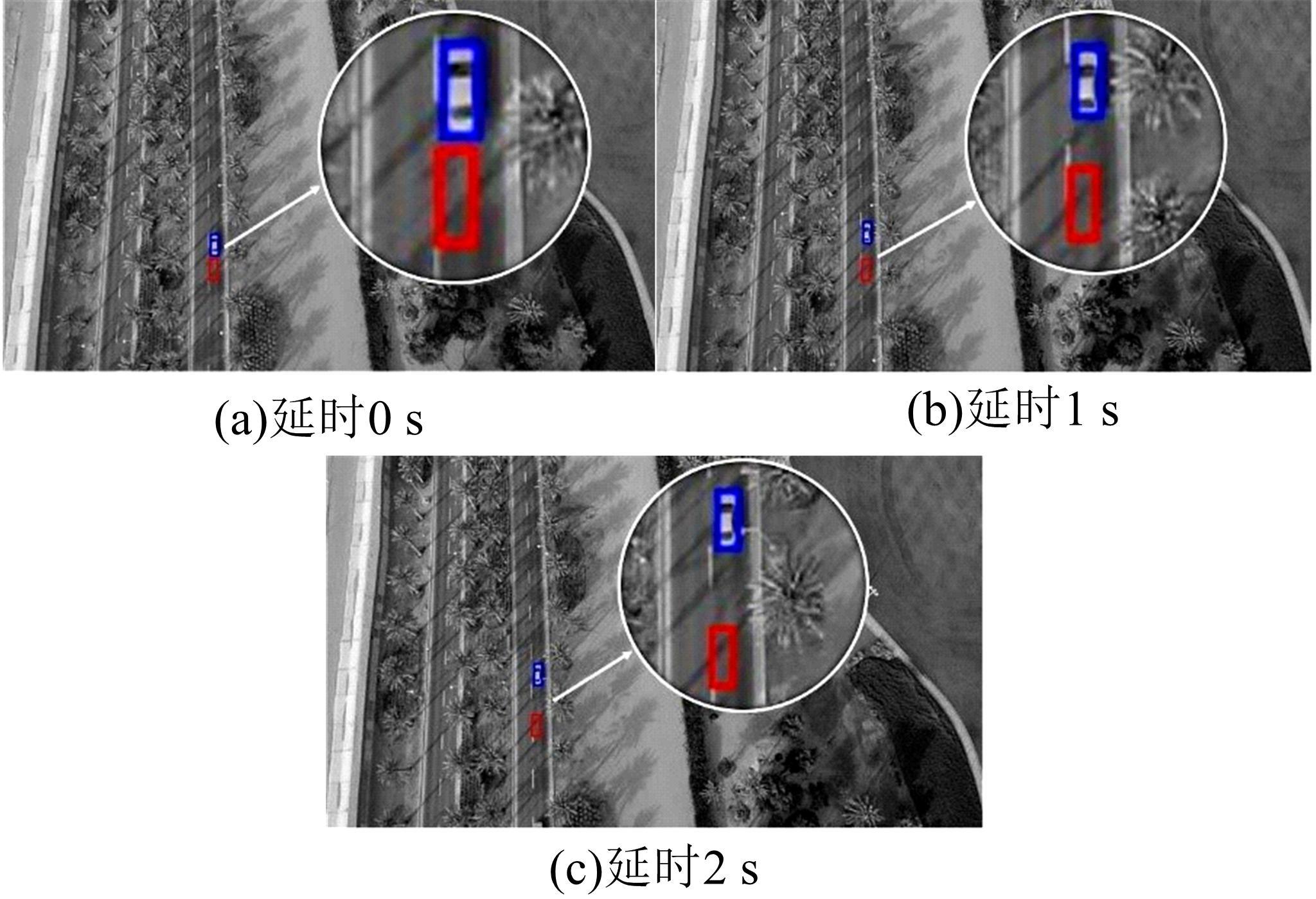
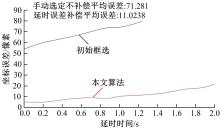
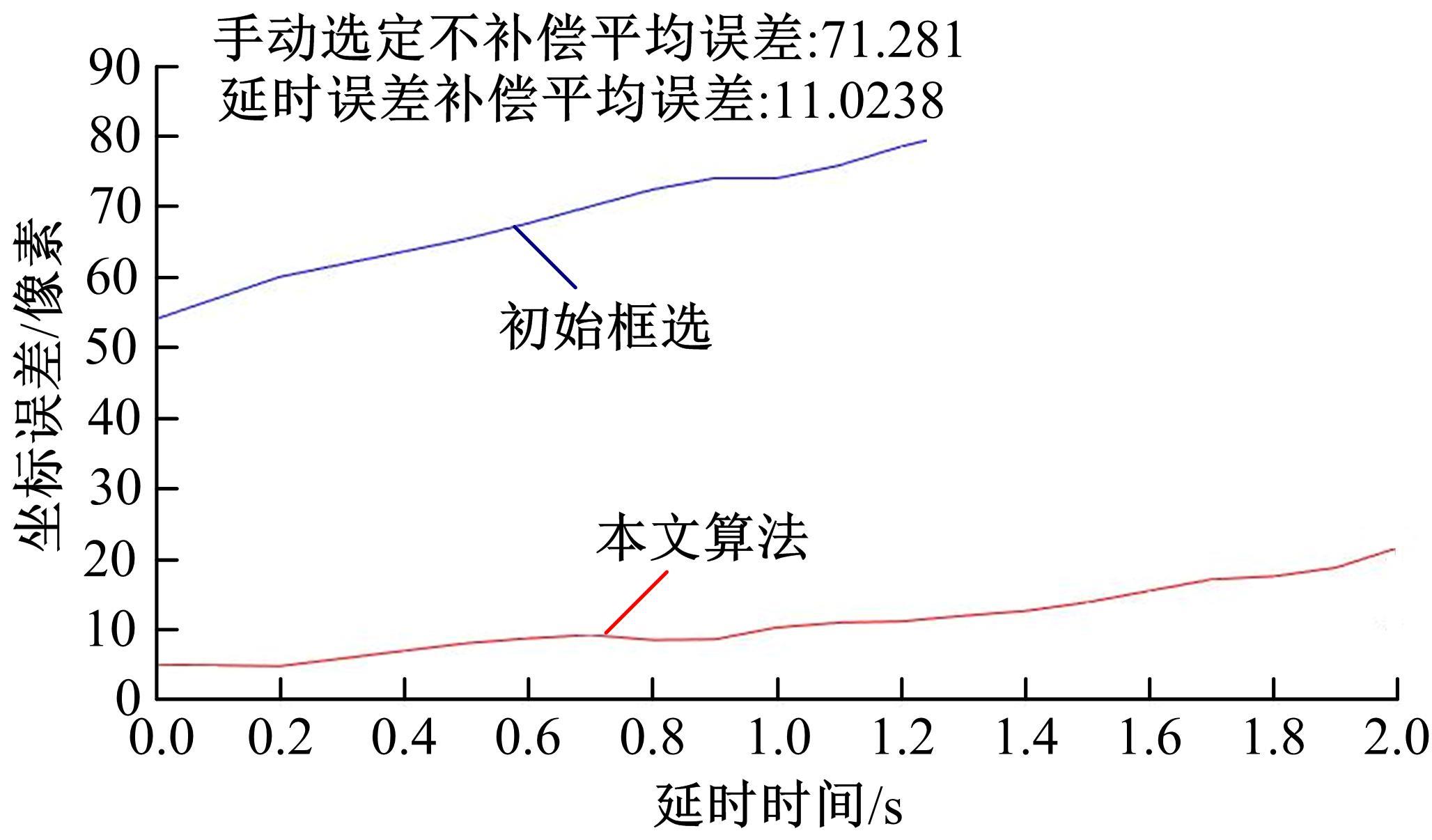
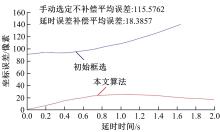
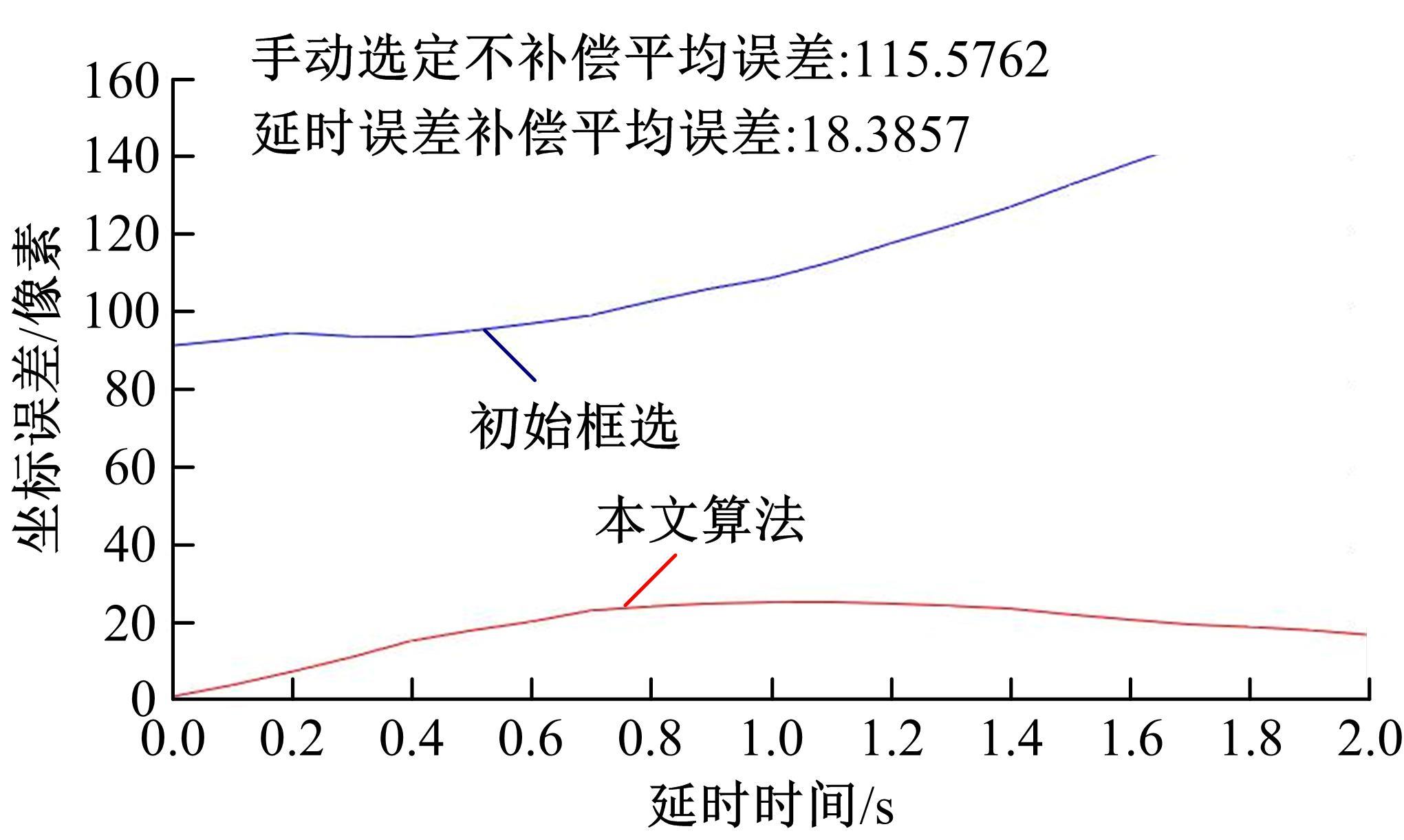
为了提高多无人机搜寻的效率,降低实际搜寻过程中操作和通信延时带来的误差影响,提高定位精度,提出了多无人机地面移动目标搜寻和定位方法。首先,通过地面站为单一无人机手动搜寻框选目标并提取目标共享信息。然后,他机根据共享信息,利用YOLOv3自动检测并定位目标。最后,设计了基于判别相关滤波器的延时误差补偿算法,对选定过程中的坐标误差进行估计和补偿。实验结果表明,本文方法有效提高了多机目标搜寻和定位的效率和精度。
中图分类号:
- TP242







| 1 | 陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报:工学版, 2016, 46(5): 1439-1446. |
| Chen Qiang, Xu Hong-guo, Tan Li-dong. Surveying method of traffic accident scene based on SUAV photogrammetry[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1439-1446. | |
| 2 | 邸斌, 周锐, 董卓宁. 考虑信息成功传递概率的多无人机协同目标最优观测与跟踪[J]. 控制与决策, 2016, 31(4): 616-622. |
| Di Bin, Zhou Rui, Dong Zhuo-ning. Cooperative localization and tracking of multiple targets with the communication-aware unmanned aerial vehicle system[J]. Control and Decision, 2016, 31(4): 616-622. | |
| 3 | Oh H, Kim S. Persistent standoff tracking guidance using constrained particle filter for multiple UAVs[J]. Aerospace Science and Technology,2019,84: 257-264. |
| 4 | 汪亮, 王文, 王禹又,等. 强化学习方法在通信拒止战场仿真环境中多无人机目标搜寻问题上的适用性研究[J].中国科学: 信息科学, 2020, 50(3): 375-395. |
| Wang Liang, Wang Wen, Wang Yu-you, et al. Feasibility of reinforcement learning for UAV-based target searching in a simulated communication denied environment[J]. Scientia Sinica (Informationis), 2020, 50(3): 375-395. | |
| 5 | 沈东, 魏瑞轩, 祁晓明, 等. 基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策[J].自动化学报, 2014, 40(7): 1391-1403. |
| Shen Dong, Wei Rui-xuan, Qi Xiao-ming, et al. Receding horizon decision method based on MTPM and DPM for Multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40(7): 1391-1403. | |
| 6 | 屈耀红, 张峰, 谷任能, 等.基于距离测量的多无人机协同目标定位方法[J]. 西北工业大学学报, 2019, 37(2): 266-272. |
| Qu Yao-hong, Zhang Feng, Gu Ren-neng, et al. Target cooperative location method of multi-UAV based on pseudo range measurement[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 266-272. | |
| 7 | Redding J D, McLain T W, Beard R W, et al.Vision-based target localization from a fixed-wing miniature air vehicle[C]∥American Control Conference, Minneapolis, MN, USA,2006: 2862-2867. |
| 8 | 何文涛.无人机定位技术及其应用[J]. 光电技术应用, 2003,18(5): 3-6. |
| He Wen-tao. UAV Positioning technology and its application[J]. Electro-optics & Passive Countermeasures, 2003,18(5): 3-6. | |
| 9 | Herekoglu O, Hasanzade M, Saldiran E, et al. Flight testing of a multiple UAV RF emission and vision based target localization method[C]∥AIAA Scitech, San Diego, USA, 2019: 1-18. |
| 10 | Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 37(3): 583-596. |
| 11 | 刘巧元, 王玉茹, 张金玲, 等. 基于相关滤波器的视频跟踪方法研究进展[J]. 自动化学报, 2019, 45(2):265-275. |
| Liu Qiao-yuan, Wang Yu-ru, Zhang Jin-ling, et al. Research progress of visual tracking methods based on correlation filter[J]. Acta Automatica Sinica, 2019, 45(2):265-275. | |
| 12 | 孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260. |
| Meng Lu, Yang Xu. A survey of object tracking algorithms[J]. Acta Automatica Sinica, 2019, 45(7): 1244-1260. |
| [1] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [4] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [5] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [6] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [7] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [8] | 鄢永耀, 刘伟, 付锦江. 高定位精度转台检测系统调整误差补偿[J]. 吉林大学学报(工学版), 2017, 47(3): 855-860. |
| [9] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
| [10] | 张立斌, 苏建, 单洪颖, 田永军, 刘苏超. 轮胎印迹压电式汽车轴距差检测误差补偿方法[J]. 吉林大学学报(工学版), 2011, 41(02): 327-0332. |
| [11] | 秦勇,赵杰,王晓宇 . 基于椭圆拟合误差补偿算法的数字磁罗盘 [J]. 吉林大学学报(工学版), 2009, 39(02): 489-0493. |
| [12] | 李欣欣, 卢全国, 杨志刚, 程光明, 曾平. 蠕动式精密直线驱动器[J]. 吉林大学学报(工学版), 2003, (2): 20-24. |
|
||