吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 853-862.doi: 10.13229/j.cnki.jdxbgxb20220612
• 通信与控制工程 • 上一篇
基于补偿函数观测器的四旋翼无人机姿态受限控制
齐国元( ),李阔,王琨
),李阔,王琨
- 天津工业大学 天津市电气设备智能控制重点实验室,天津 300387
Attitude constrained control of quadrotor unmanned aerial vehicle based on compensation function observer
Guo-yuan QI(),Kuo LI,Kun WANG
- Tianjin Key Laboratory of Intelligent Control of Electrical Equipment,Tiangong University,Tianjin 300387,China
摘要:
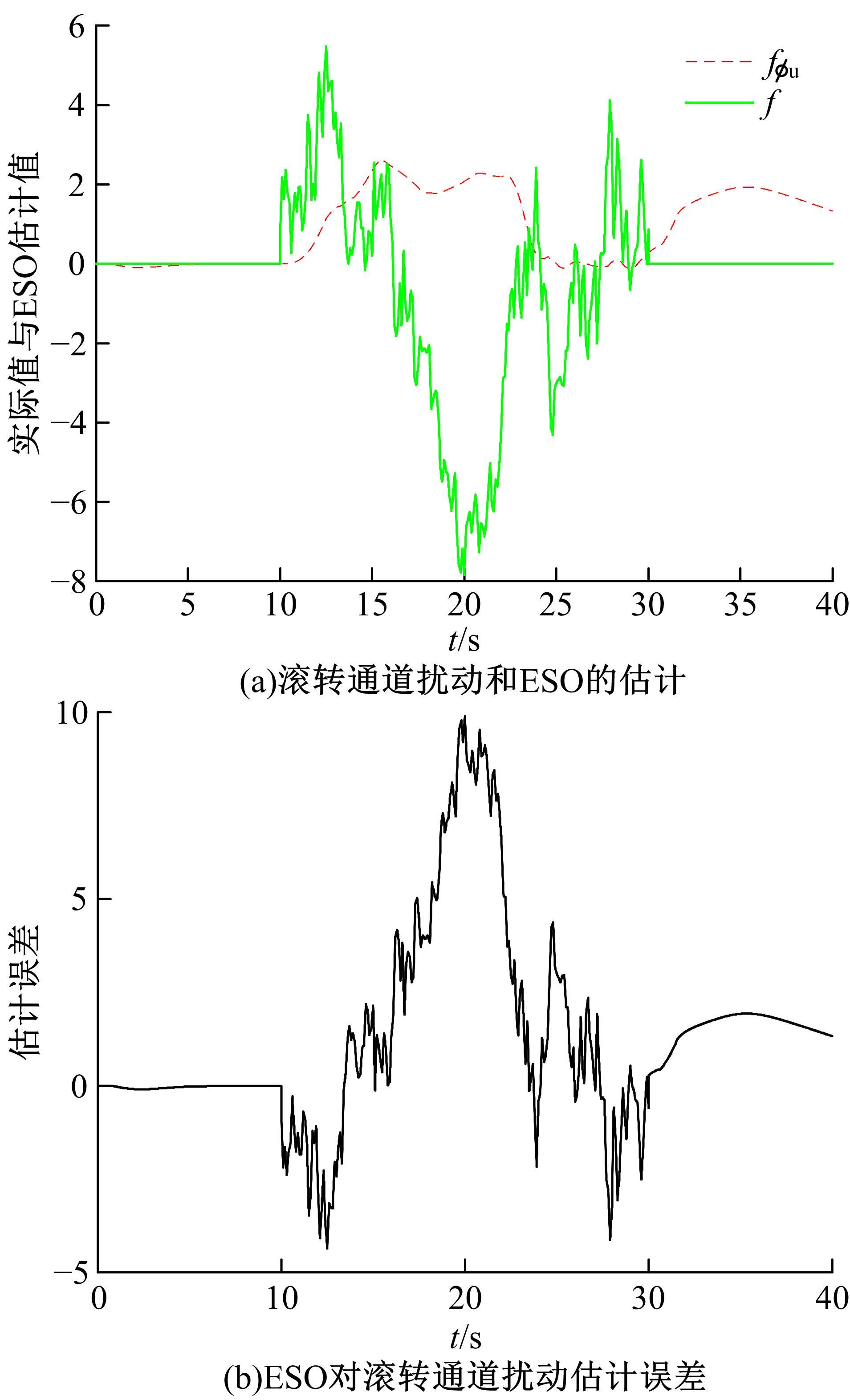
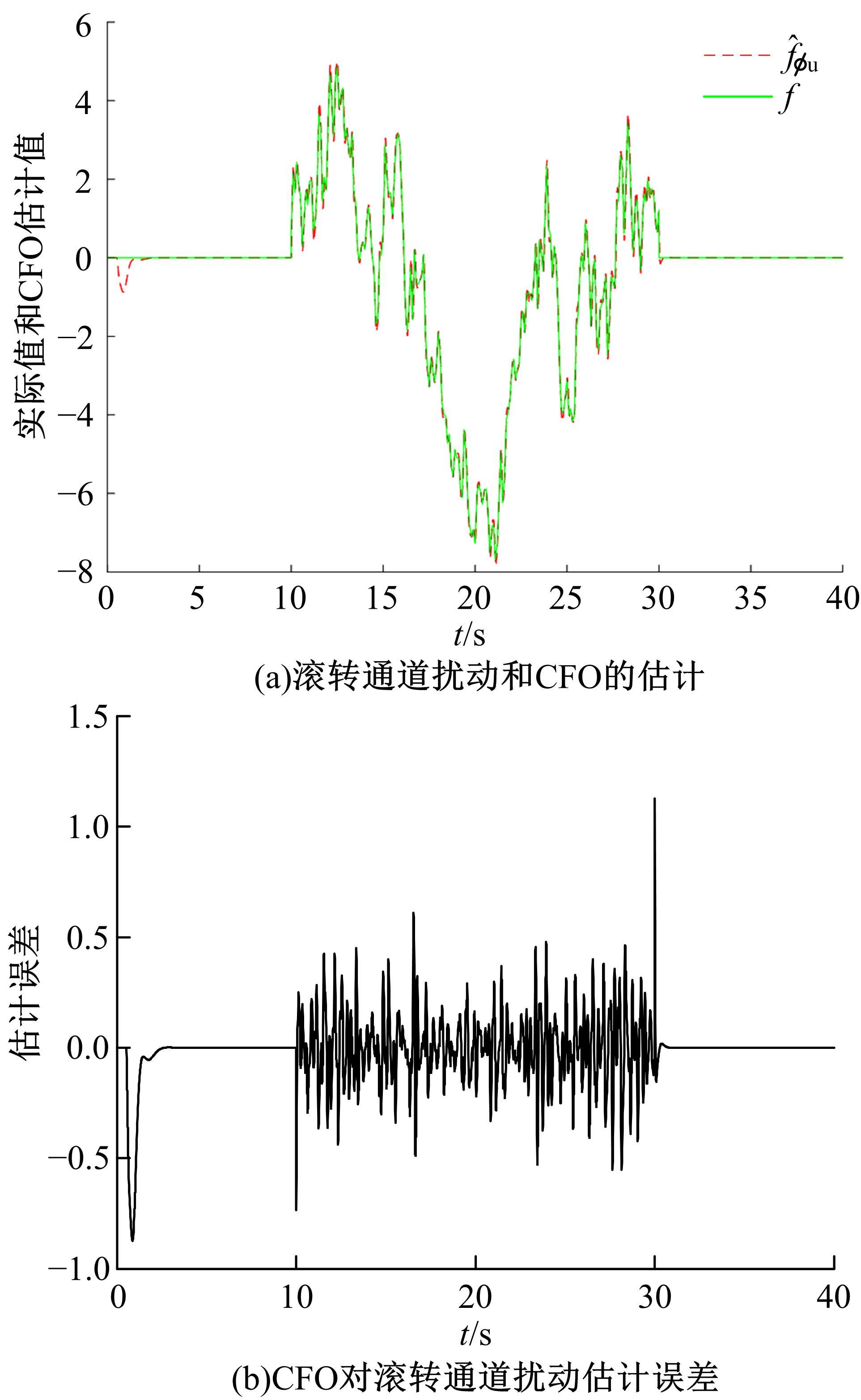
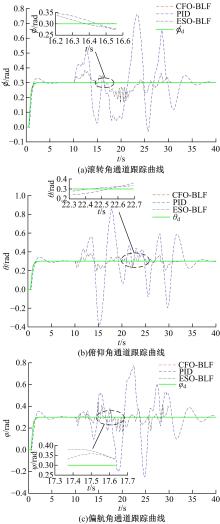
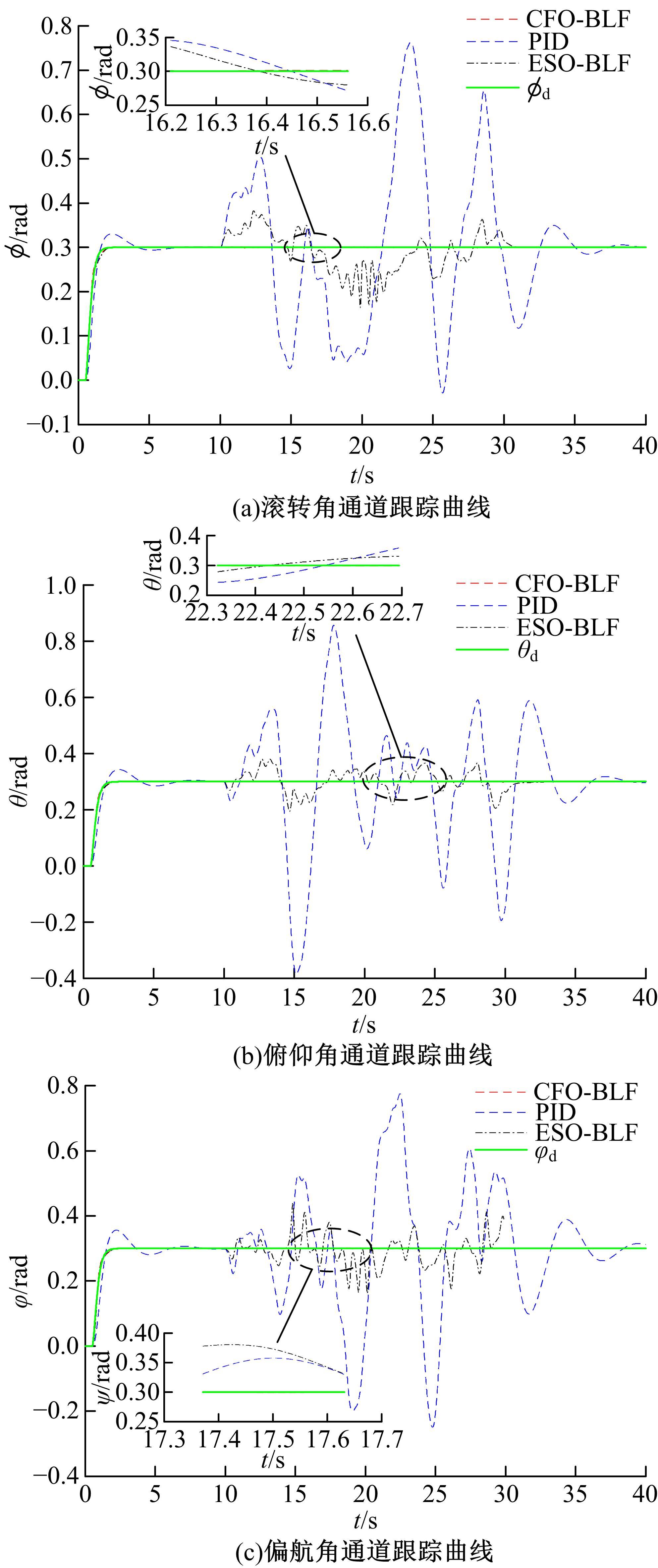
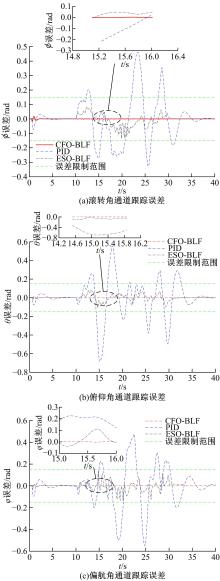
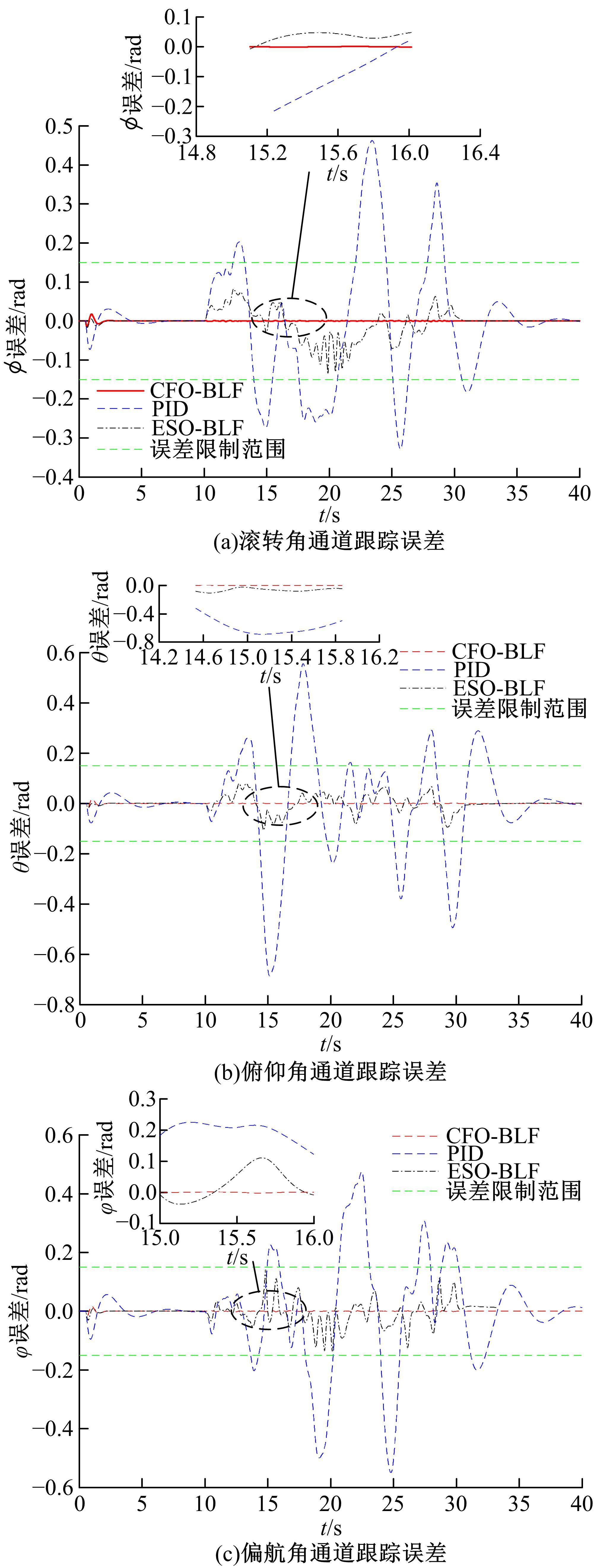
由于四旋翼无人机的飞行环境及自身执行机构等原因限制,为了保证姿态始终在约束范围内变化,引入障碍Lyapunov函数(BLF)保证系统能够达到预设性能。提出了一种基于补偿函数观测器(CFO)的反步姿态受限控制(CFO-BLF)方案。通过Simulink仿真对比了CFO-BLF反步控制、ESO-BLF反步控制和PID控制下四旋翼无人机的姿态跟踪性能,验证了
中图分类号:
- TP273

| 1 | Zhang Yong, Chen Zeng-qiang, Zhang Xing-hui, et al. A novel control scheme for quadrotor UAV based upon active disturbance rejection control[J]. Aerospace Science and Technology, 2018, 79: 601-609. |
| 2 | Hu Jun-yan, Niu Han-lin, Carrasco J, et al. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring[J]. Aerospace Science and Technology, 2022, 123(2): No.107494. |
| 3 | Luis A B, Eduardo L C, Mario G S, et al. Towards a standard design model for quad-rotors: a review of current models, their accuracy and a novel simplified model[J]. Progress in Aerospace Sciences, 2017, 95: 1-23. |
| 4 | Liu Yang, Yao De-yin, Wang Li-jie, et al. Distributed adaptive fixed-time robust platoon control for fully heteroge-neous vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 53(1): 264-274. |
| 5 | Liu Yang, Li Hong-yi, Zuo Zong-yu, et al. An overview of finite/fixed-time control and its application in engineering systems[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(12): 2106-2120. |
| 6 | Zhou Si-cheng, Guo Ke-xin, Yu Xiang, al et, Fixed-time observer based safety control for a quadrotor UAV[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2815-2825. |
| 7 | Kanellakopoulos I, Kokotovic P V. Systematic design of adaptive controllers for feedback linearizable systems[C]∥1991 American Control Conference, Boston, America, 1991: 1241-1253. |
| 8 | Simone M, Guida D. Control design for an under-actuated UAV model[J]. FME Transactions, 2018, 46(4): 443-452. |
| 9 | Sarwar S, Rehman S U. Mathematical modelling of unmanned aerial vehicles[J]. Mehran University Research Journal of Engineering and Technology, 2013, 32(4): 615-622. |
| 10 | Saidi E, Hammi Y, Douik A. Modelling and predictive control of an inverted pendulum system by MLD approach: multivariable case[J]. International Journal of Modelling, Identification and Control, 2017, 27(1): 40-48. |
| 11 | Masters S E, Challis J H. Increasing the stability of the spring loaded inverted pendulum model of running with a wobbling mass[J]. Journal of Biomechanics, 2021, 123: No.110527. |
| 12 | Labbadi M, Cherkaoui M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV[J]. Aerospace Science and Technology, 2019, 93: No.105306. |
| 13 | Chen Fu-yang, Jiang Rong-qiang, Zhang Kang-kang, et al. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056. |
| 14 | Basri M A M. Robust backstepping controller design with a fuzzy compensator for autonomous hovering quadrotor UAV[J]. Transactions of Electrical Engineering, 2018, 42(3): 379-391. |
| 15 | Swaroop D, Hedrick J K, Yip P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899. |
| 16 | Fu Chun-yang, Hong Wei, Lu Hui-qiu, et al. Adaptive robust backstepping attitude control for a multi-rotor unmanned aerial vehicle with time-varying output constraints[J]. Aerospace Science and Technology, 2018, 78: 593-603. |
| 17 | Ding Chen, Ma Li, Ding Shi-hong. Second-order sliding mode controller design with mismatched term and time-varying output constraint[J]. Applied Mathematics and Computation, 2021, 407(2): No.126331. |
| 18 | Ngo K B, Mahony R, Jiang Z P. Integrator backstepping using barrier functions for systems with multiple state constraints[C]∥Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 2005: 8306-8312. |
| 19 | Cui Lei, Hou Xiu-ying, Zuo Zhi-qiang, et al. An adaptive fast super-twisting disturbance observer-based dual closed-loop attitude control with fixed-time convergence for UAV[J]. Journal of the Franklin Institute, 2022, 359(6): 2514-2540. |
| 20 | Alattas K A, Mofid O, Alanazi A K, et al. Barrier function adaptive nonsingular terminal sliding mode control approach for quad-rotor unmanned aerial vehicles[J]. Sensors, 2022, 22(3): 909-909. |
| 21 | Dasgupta R, Roy S B, Bhasin S. Barrier-lyapunov function based dynamic surface control of quad-rotorcraft[J]. IFAC Papers OnLine, 2020, 53(2): 9378-9383. |
| 22 | Hou Zhong-sheng, Wang Zhuo. From model-based control to data-driven control: survey, classification and perspective[J]. Information Sciences, 2013, 235: 3-35. |
| 23 | Jiang Yu, Jiang Zhong-ping. Computational adaptive optimal control for continuous-time linear systems with completely unknown dynamics[J]. Automatica, 2012, 48(10): 2699-2704. |
| 24 | Ren Bei-bei, Zhong Qing-chang, Chen Jin-hao.Robust control for a class of nonaffine nonlinear systems based on the uncertainty and disturbance estimator[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5881-5888. |
| 25 | Zhong Qing-chang, Rees D. Control of uncertain LTI systems based on an uncertainty and disturbance estimator[J] Journal of Dynamic Systems, Measurement, and Control, 2004, 126(4): 905-910. |
| 26 | Sanz R, Garcia P, Zhong Qing-chang, et al. Control of disturbed systems with measurement delays: application to quadrotor vehicles[C]∥23rd Mediterranean Conference on Control and Automation, Torremolinos, Spain, 2015: 927-932. |
| 27 | 周来宏, 窦景欣, 张居乾, 等. 基于改进反步法的四旋翼无人机轨迹跟踪控制[J]. 东北大学学报: 自然科学版, 2018, 39(1): 66-70. |
| Zhou Lai-hong, Dou Jing-xin, Zhang Ju-qian, et al. Trajtecory tracking control for a quadrotor UAV based on improved backstepping[J]. Journal of Northeastern University (Nature Science), 2018, 39(1): 66-70. | |
| 28 | 鲜斌, 李杰奇, 古训.基于非线性扰动观测器的无人机地面效应补偿[J].吉林大学学报: 工学版, 2022, 52(8): 1926-1933. |
| Xian Bin, Li Jie-qi, Gu Xun.Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(8): 1926-1933. | |
| 29 | Han Jing-qing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 30 | Qi Guo-yuan, Li Xia, Chen Zeng-qiang. Problems of extended state observer and proposal of compensation function observer for unknown model and application in UAV[J]. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2022, 52(5): 2899-2910. |
| 31 | 李霞, 齐国元, 郭曦彤, 等. 高阶微分反馈控制及在四旋翼飞行器中的应用[J]. 航空学报, 2022, 43(12): No.326047. |
| Li Xia, Qi Guo-yuan, Guo Xi-tong, et al. High-order differential feedback control and its application in quadrotor[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12): No.326047. | |
| 32 | Beal T R. Digital simulation of atmospheric turbulence for dryden and von karman models[J]. Journal of Guidance, Control, and Dynamics, 1993, 16(1): 132-138. |
| [1] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [4] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [5] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [6] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [7] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [8] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [9] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
|
||