吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 841-852.doi: 10.13229/j.cnki.jdxbgxb20221249
• 通信与控制工程 • 上一篇
四旋翼无人机寿命预测和自主维护方法
申富媛1,2( ),李炜1,2(),蒋栋年1,2
),李炜1,2(),蒋栋年1,2
- 1.兰州理工大学 电气工程与信息工程学院,兰州 730050
2.兰州理工大学 甘肃省工业过程先进控制重点实验室,兰州 730050
Life prediction and self⁃maintenance method of quadrotor unmanned aerial vehicle
Fu-yuan SHEN1,2(),Wei LI1,2(),Dong-nian JIANG1,2
- 1.College of Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou 730050,China
2.Key Laboratory of Gansu Advanced Control for Industrial Processes,Lanzhou University of Technology,Lanzhou 730050,China
摘要:
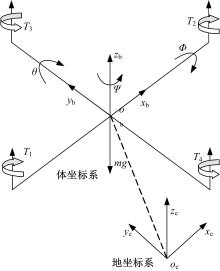
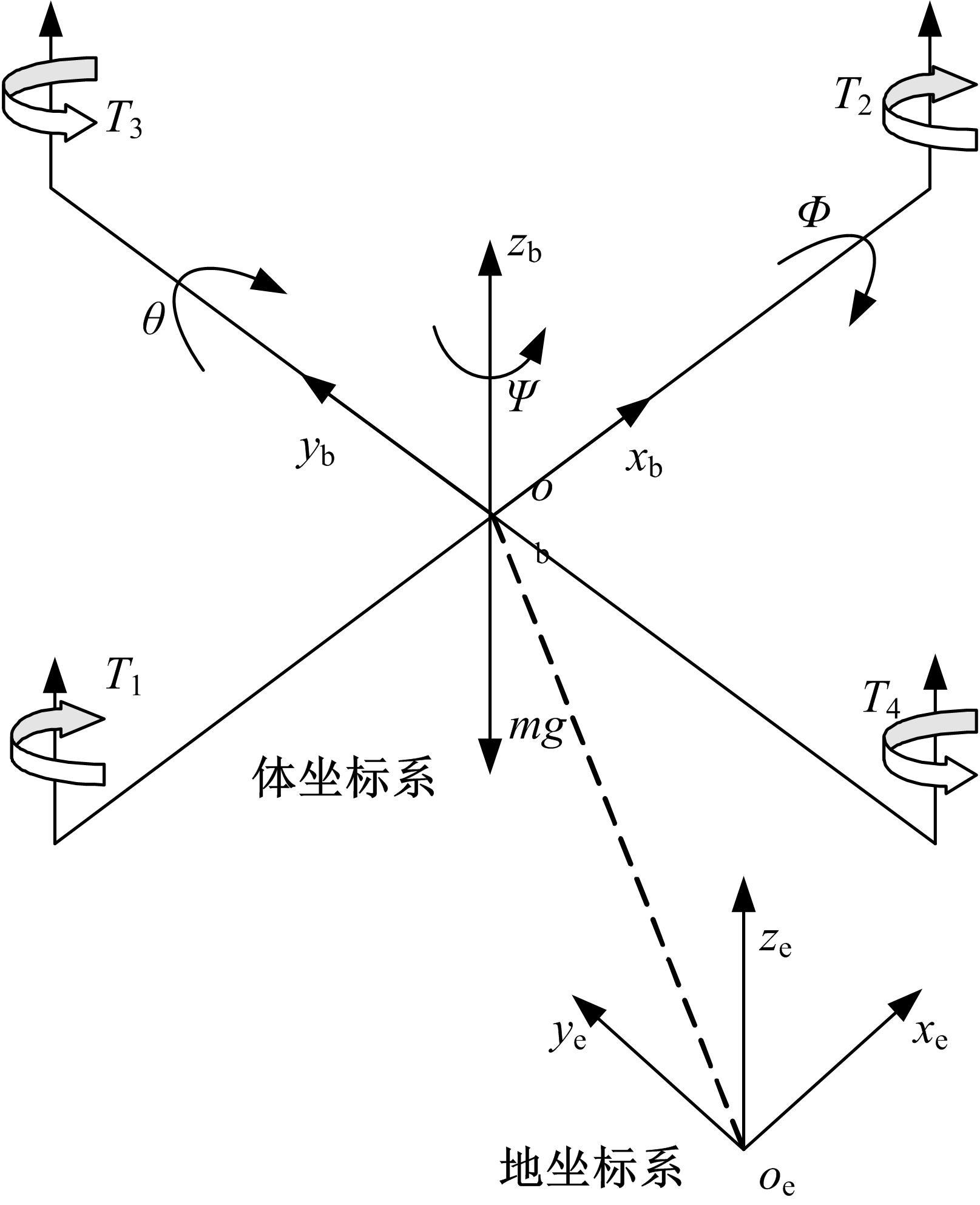
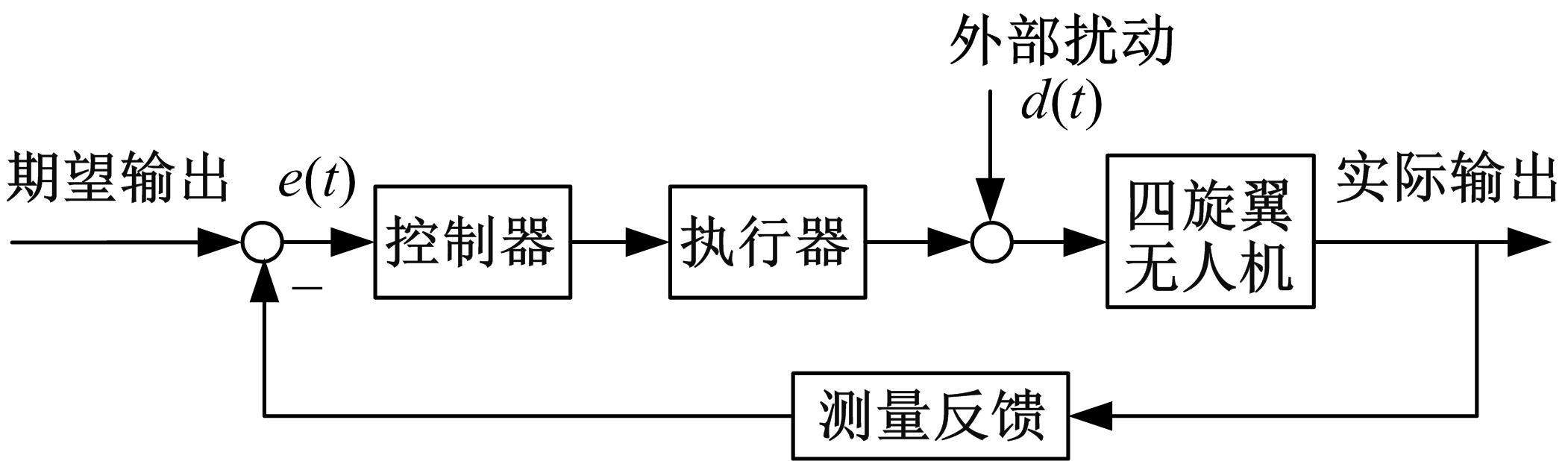
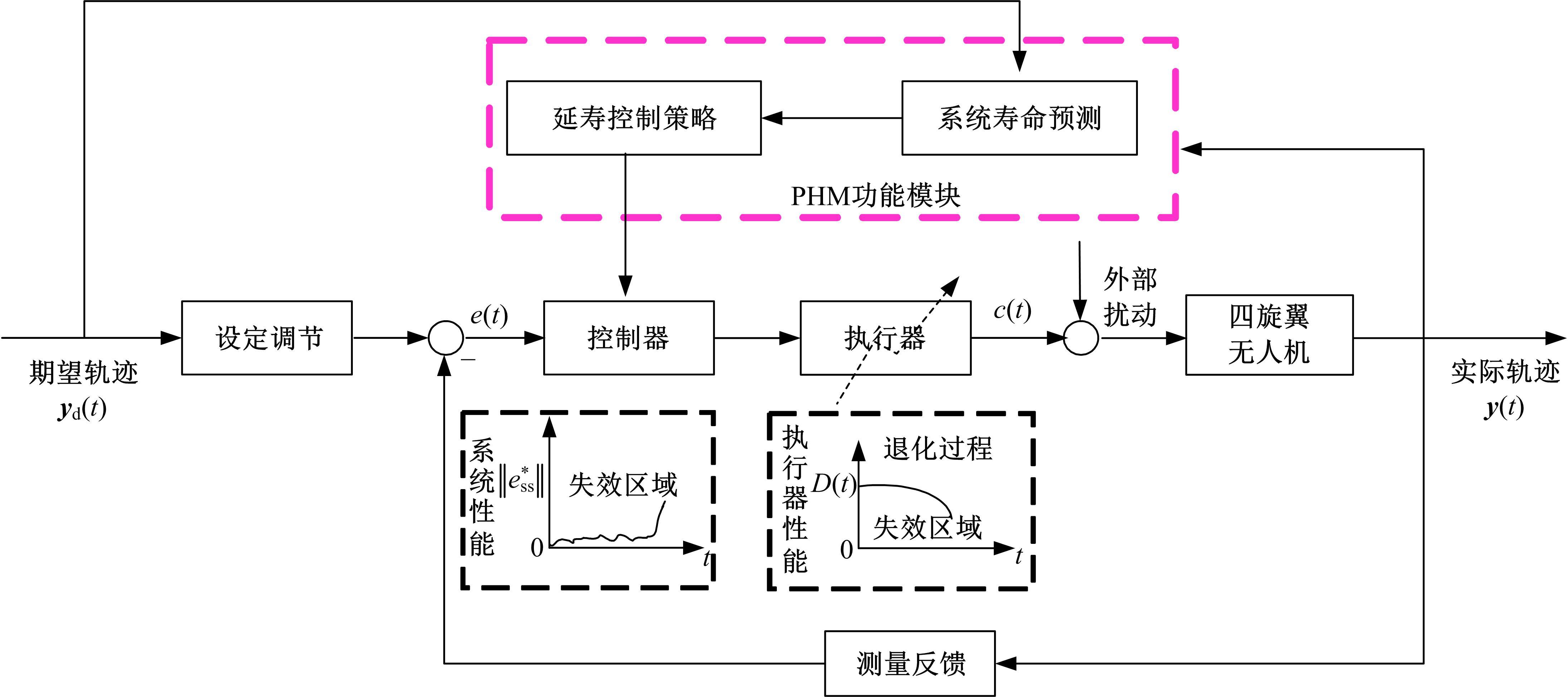
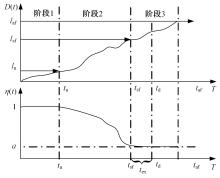
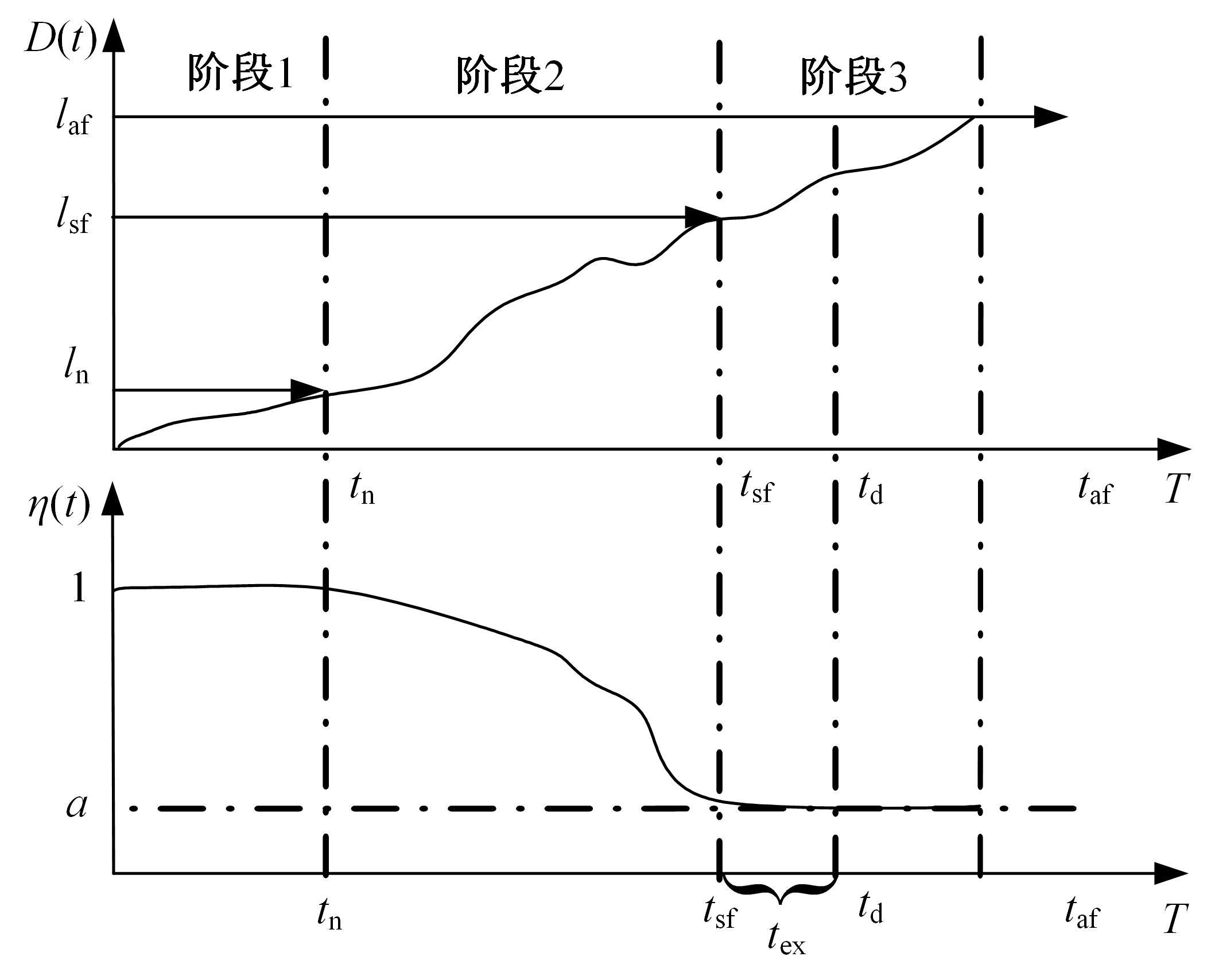
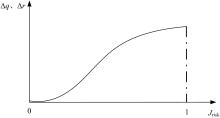
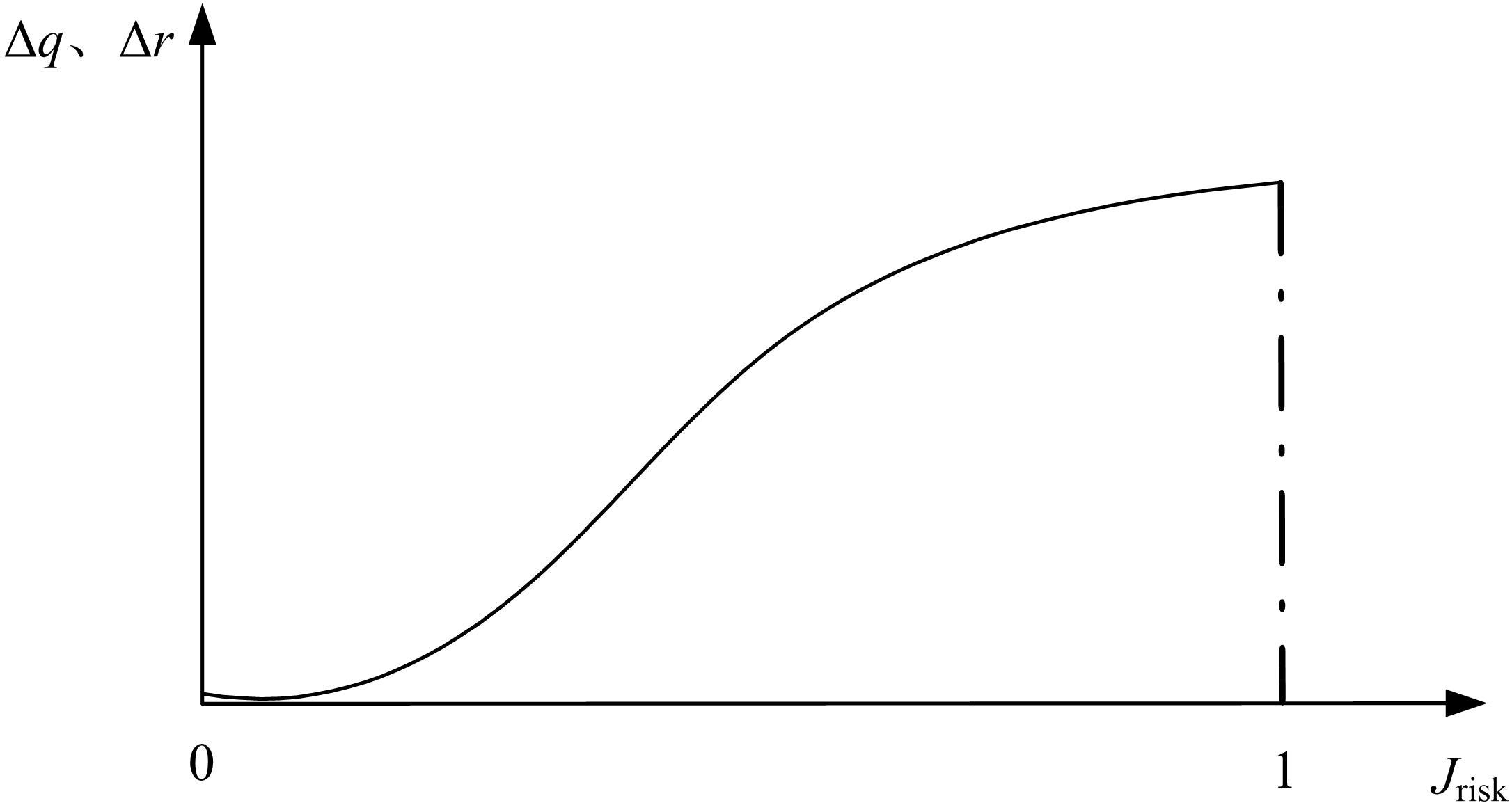
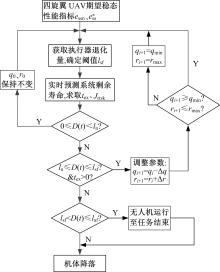
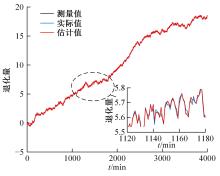
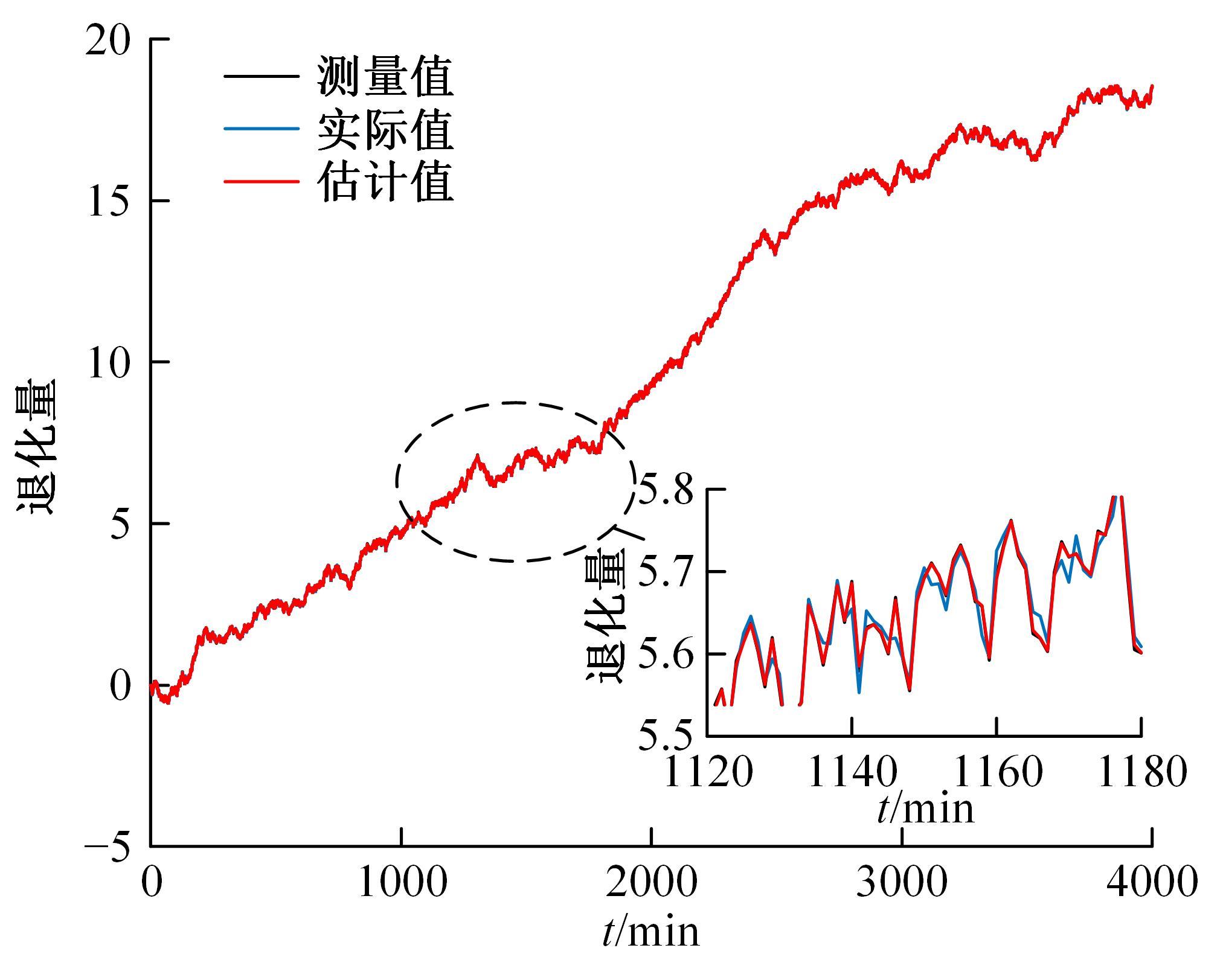
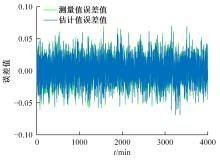
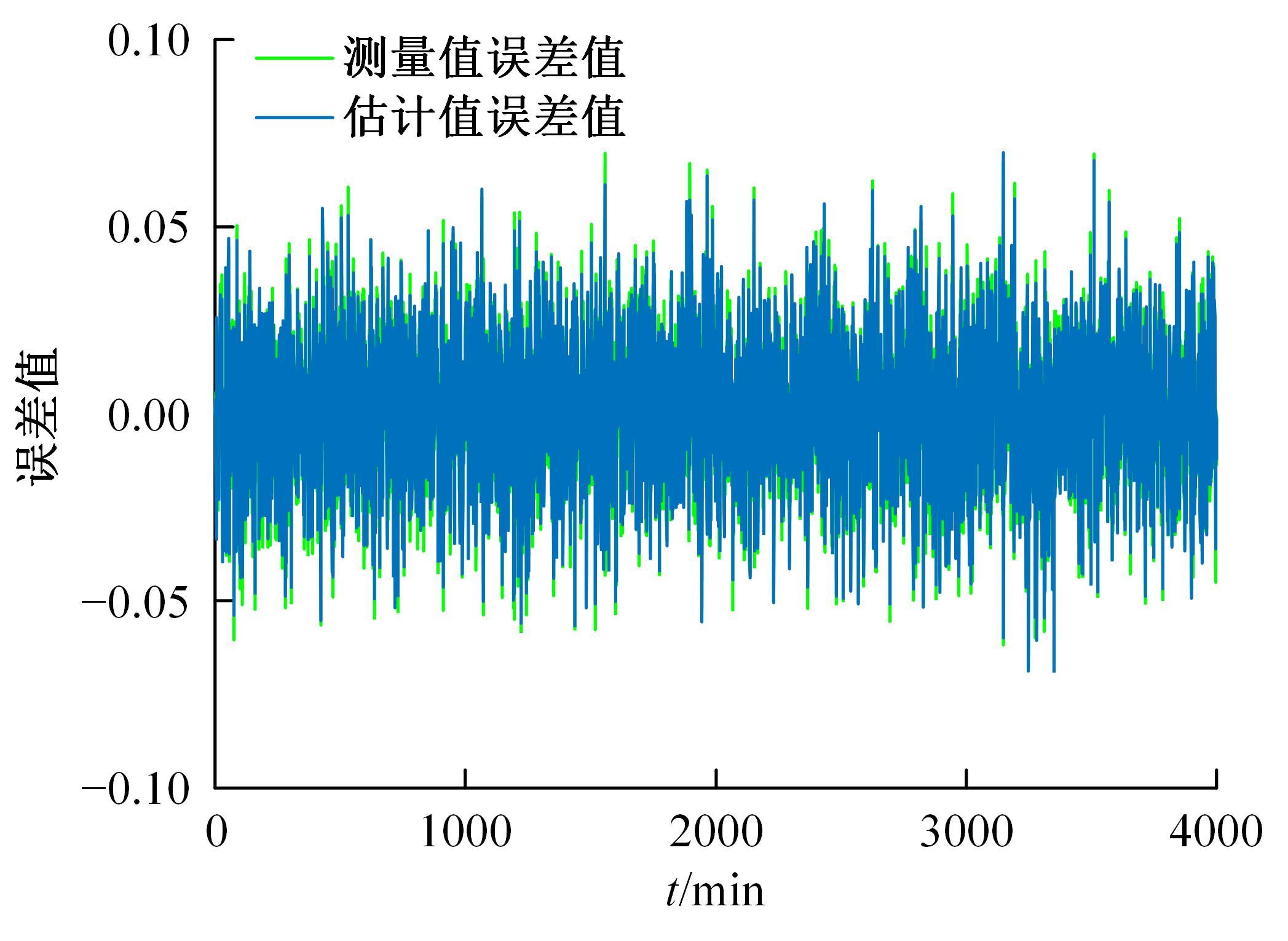
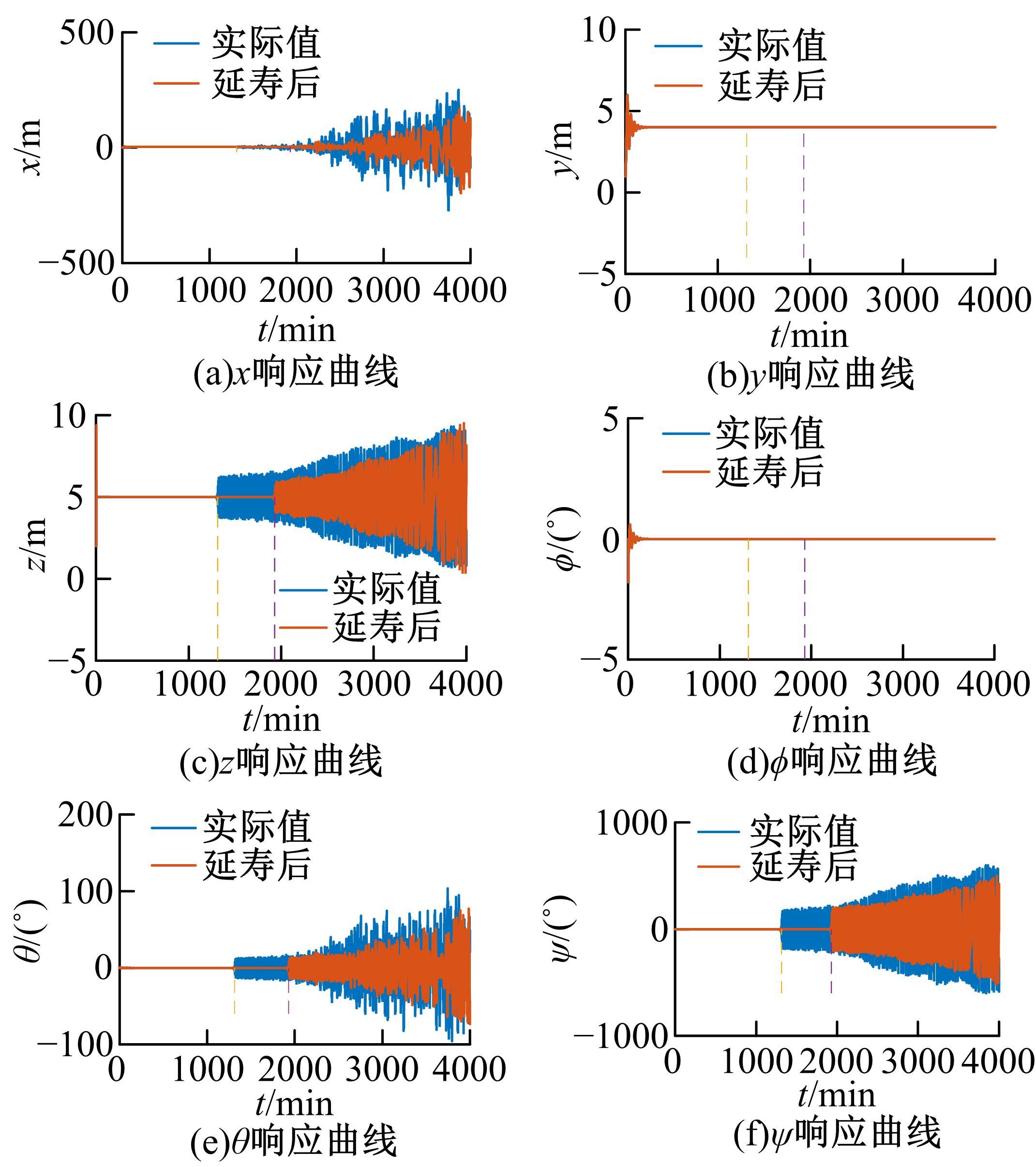
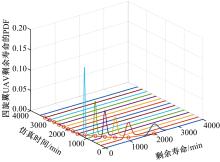
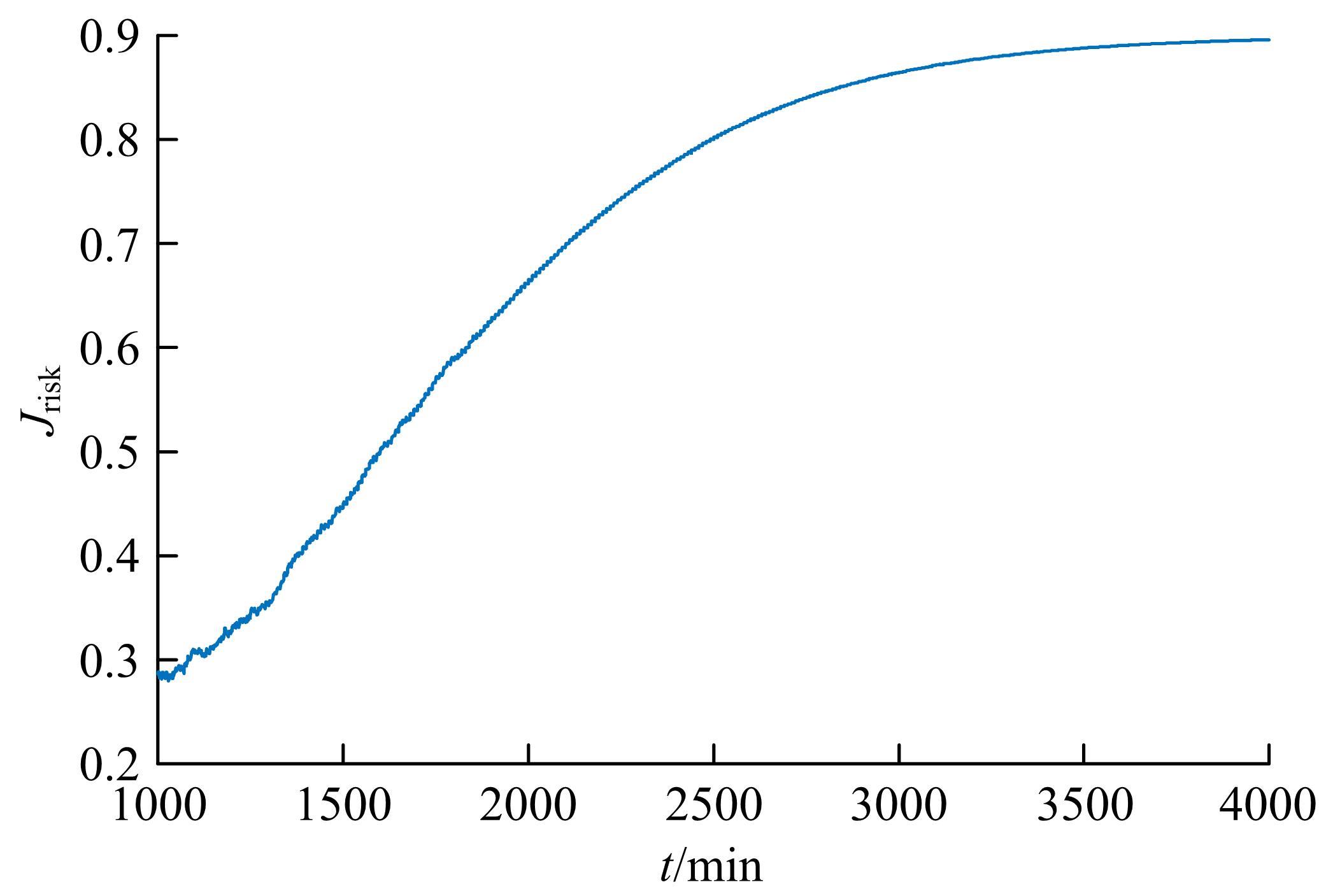
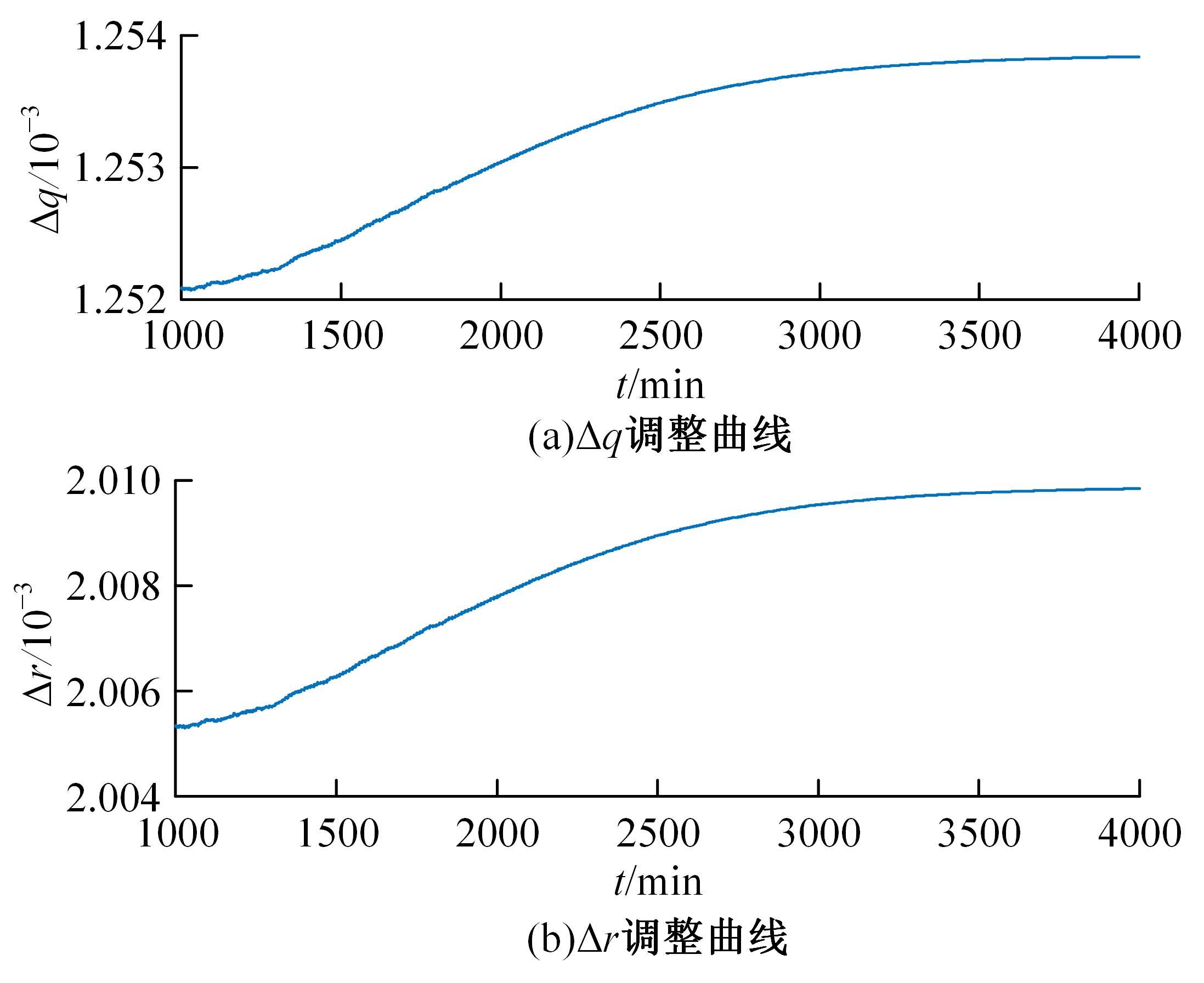
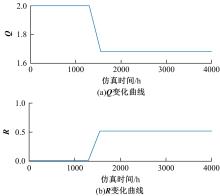
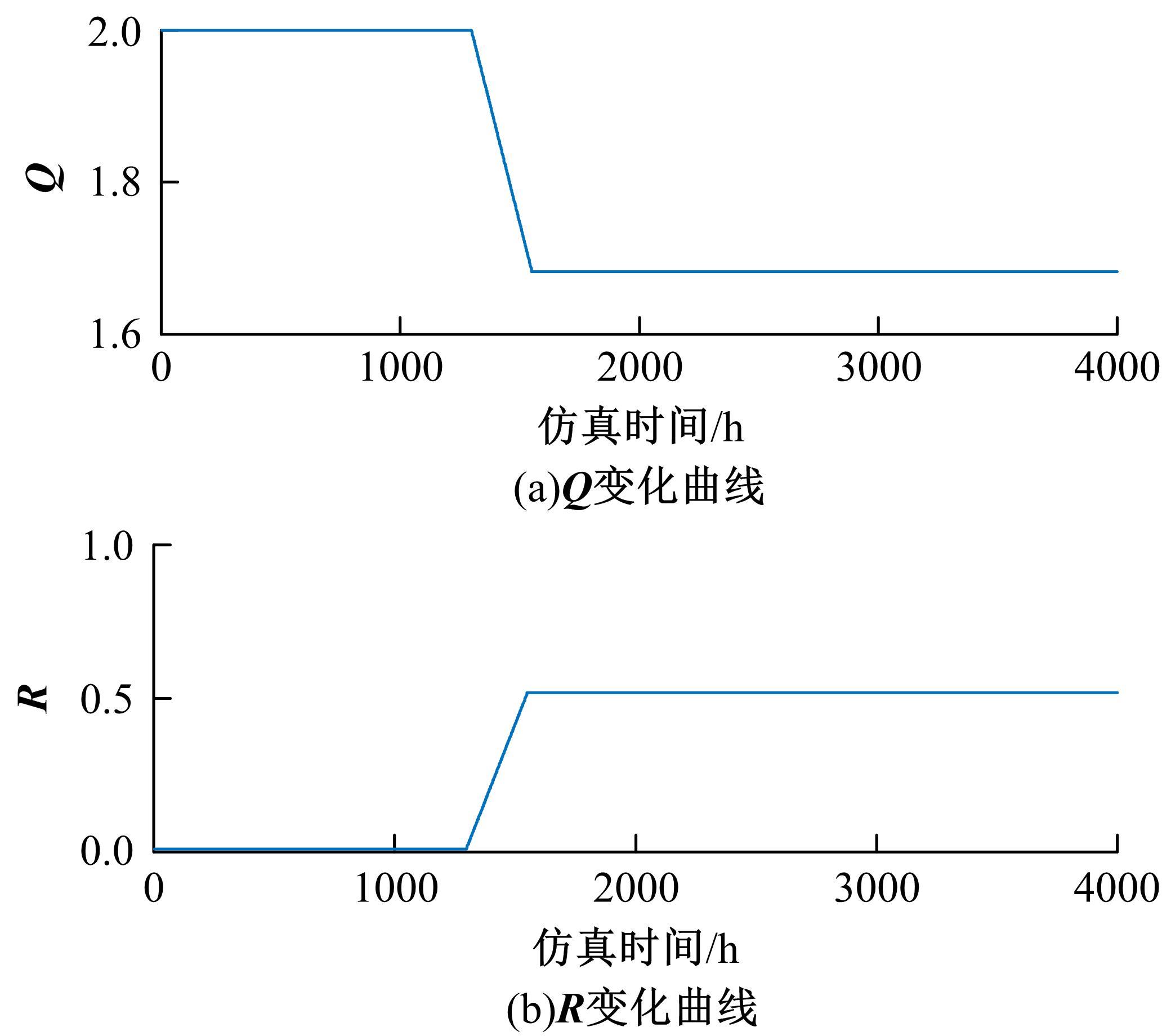
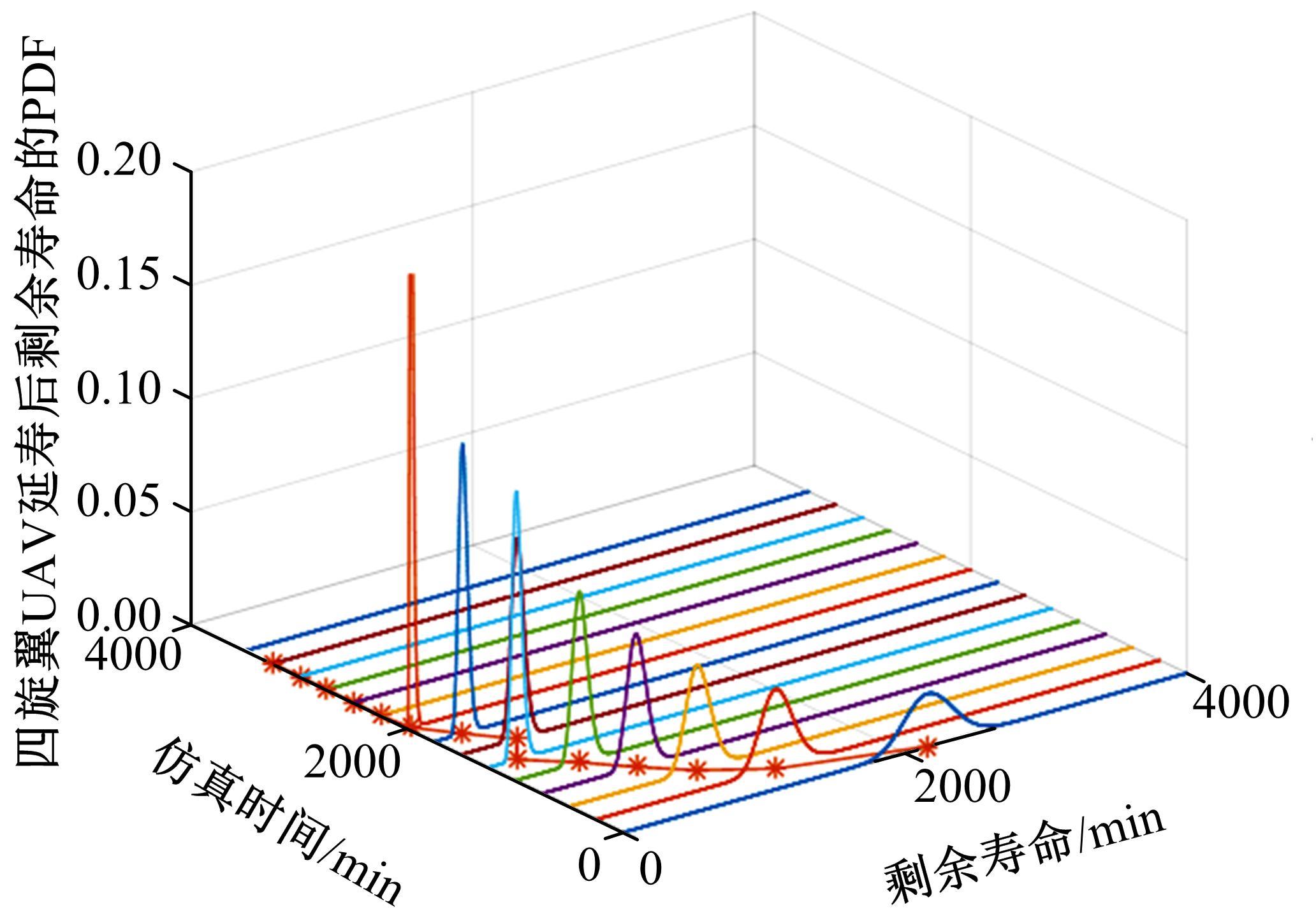
针对四旋翼无人机运行过程中执行器退化引起的剩余寿命缩短问题,提出一种基于风险评价函数的模型预测控制自主维护策略。首先,通过深入分析无人机控制机理构建了自主维护体系架构。其次,基于系统失效阈值的定义,得到悬停状态下无人机剩余寿命分布的解析解,并依据风险评价结果自适应修正模型预测权值矩阵 Q 和 R 中元素值实现自主维护,从而在无人机性能与寿命之间达到更好的折中平衡。最后,仿真实验结果表明,本文提出的自主维护策略,可使执行器隐含退化的无人机剩余寿命延长616 min,并保持较好的机体性能。
中图分类号:
- TP273



| 1 | 张友民, 余翔, 屈耀红, 等. 无人机自主控制关键技术新进展[J]. 科技导报, 2017, 35(7):39-48. |
| Zhang You-min, Yu Xiang, Qu Yao-hong, et al. New developments on key techniques in UAV autonomous control[J]. Science & Technology Review, 2017, 35(7): 39-48. | |
| 2 | 郝伟, 鲜斌. 四旋翼无人机姿态系统的非线性容错控制设计[J]. 控制理论与应用, 2015, 32(11): 1457-1463. |
| Hao Wei, Xian Bin. Nonlinear fault tolerant control design for quadrotor unmanned aerial vehicle attitude system[J]. Control Theory & Applications, 2015, 32(11): 1457-1463. | |
| 3 | Abbaspour A, Aboutalebi P, Yen K K, et al. Neural adaptive observer-based sensor and actuator fault detection in nonlinear systems: application in UAV[J]. ISA Transactions, 2017, 67: 317-329. |
| 4 | 王燕萍, 吕震宙, 赵新攀. 基于Markov Chain Monte Carlo的幂律过程的Bayesian分析[J]. 航空动力学报, 2010, 25(1):152-159. |
| Wang Yan-ping, Lv Zhen-zhou, Zhao Xin-pan. Bayesian analysis for the power law process based on Markov Chain Monte Carlo[J]. Journal of Aerospace Power, 2010, 25(1): 152-159. | |
| 5 | 王华伟, 高军, 吴海桥. 基于竞争失效的航空发动机剩余寿命预测[J]. 机械工程学报, 2014, 50(6):197-205. |
| Wang Hua-wei, Gao Jun, Wu Hai-qiao. Residual remaining life prediction based on competing failures for aircraft engines[J]. Journal of Mechanical Engineering, 2014, 50(6): 197-205. | |
| 6 | 朱磊, 左洪福, 蔡景. 基于Wiener过程的民用航空发动机性能可靠性预测[J]. 航空动力学报, 2013, 28(5): 1006-1012. |
| Zhu Lei, Zuo Hong-fu, Cai Jing. Performance reliability prediction for civil aviation aircraft engine based on Wiener process[J]. Journal of Aerospace Power, 2013, 28(5): 1006-1012. | |
| 7 | Muneer A, Taib S M, Fati S M, et al. Deep-learning based prognosis approach for remaining useful life prediction of turbofan engine[J]. Symmetry, 2021, 13(10): No.1861. |
| 8 | 苗建国, 王剑宇, 张恒, 等. 无人机故障诊断技术研究进展概述[J]. 仪器仪表学报, 2020, 41(9): 56-69. |
| Miao Jian-guo, Wang Jian-yu, Zhang Heng, et al. Review of the development of fault diagnosis technology for unmanned aerial vehicle[J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 56-69. | |
| 9 | 罗晓亮, 涂龙, 王浩旭, 等. 无人机故障预测与健康管理研究现状及发展[J]. 计算机测量与控制, 2021, 29(1): 1-5. |
| Luo Xiao-liang, Tu Long, Wang Hao-xu, et al. Research on status and development trend of prognostics and health management for military unmanned aerial vehicles[J]. Computer Measurement & Control 2021, 29(1): 1-5. | |
| 10 | Guo D F, Zhong M Y, Ji H Q, et al. A hybrid feature model and deep learning based fault diagnosis for unmanned aerial vehicle sensors[J]. Neurocomputing, 2018, 319: 155-163. |
| 11 | Liang S J, Zhang S R, Huang Y P, et al. Data-driven fault diagnosis of FW-UAVs with consideration of multiple operation conditions[J]. ISA Transactions, 2022, 126: 472-485. |
| 12 | Sierra G, Orchard M, Goebel K, et al.Battery health management for small-size rotary-wing electric unmanned aerial vehicles: an efficient approach for constrained computing platforms[J]. Reliability Engineering and System Safety, 2019, 182: 166-178. |
| 13 | Vachtsevanos G, Georgoulas G, Nikolakopoulos G. Fault diagnosis, failure prognosis and fault tolerant control of aerospace/unmanned aerial systems[C]∥24th Mediterranean Conference on Control and Automation, Athens, Greece, 2016: 366-371. |
| 14 | Niu G, Liu S Y. Demagnetization monitoring and life extending control for permanent magnet-driven traction systems[J]. Mechanical Systems and Signal Processing, 2018, 103: 264-279. |
| 15 | Si, X S, Ren Z Q, Hu X X,et al. A novel degradation modeling and prognostic framework for closed-loop systems with degrading actuator[J]. IEEE Transactions on Industrial Electronics, 2020, 67(11): 9635-9647. |
| 16 | Zhang Y M, Chamseddine A, Rabbath C, et al. Development of advanced FDD and FTC techniques with application to an unmanned quadrotor helicopter testbed[J]. Journal of the Franklin Institute, 2013, 350: 2396-2422. |
| 17 | Gautam D, Cheolkeun H. Control of a quadrotor using a smart self-tuning fuzzy PID controller[J]. International Journal of Advanced Robotic Systems, 2013, 10: 1-9. |
| 18 | Joyo M K, Kadir S F A K. LQR based controller design for altitude and longitudinal movement of quad-rotor[J]. Journal of Applied Sciences, 2016, 16(12): 588-593. |
| 19 | Wang H B, Li Z, Xiong H Y, et al. Robust H∞ attitude tracking control of a quadrotor UAV on SO(3) via variation-based linearization and interval matrix approach[J]. ISA Transactions, 2019,87: 10-16. |
| 20 | 曾小勇, 彭辉, 吴军. 基于RBF-ARX模型的改进多变量预测控制及应用[J]. 中南大学学报: 自然科学版, 2015, 46(10): 3710-3717. |
| Zeng Xiao-yong, Peng Hui, Wu Jun. An improved multivariable RBF-ARX model-based nonlinear model predictive control approach and application[J]. Journal of Central South University (Science and Technology), 2015, 46(10): 3710-3717. | |
| 21 | 贾鹤鸣, 柳泽铭, 张金阳. 基于滑模PID的微型旋翼飞行器轨迹跟踪控制[J]. 吉林大学学报: 信息科学版, 2014, 32(4): 383-388. |
| Jia He-ming, Liu Ze-ming, Zhang Jin-yang. Trajectory tracking control of rotating wing micro aerial vehicle based on sliding mode PID[J]. Journal of Jilin University (Information Science Edition), 2014, 32(4): 383-388. | |
| 22 | 齐国元, 李阔, 王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J/OL]. [2022-09-20]. |
| 23 | 司小胜, 胡昌华, 周东华. 带测量误差的非线性退化过程建模与剩余寿命估计[J]. 自动化学报, 2013, 39(5): 530-541. |
| Si Xiao-sheng, Hu Chang-hua, Zhou Dong-hua. Nonlinear degradation process modeling and remaining useful life estimation subject to measurement error[J]. Acta Automatica Sinica, 2013, 39(5): 530-541. | |
| 24 | 司小胜, 胡昌华, 张琪, 等. 不确定退化测量数据下的剩余寿命估计[J]. 电子学报, 2015, 43(1): 30-35. |
| Si Xiao-sheng, Hu Chang-hua, Zhang Qi, et al. Estimating remaining useful life under uncertain degradation measurements[J]. Acta Electronica Sinica, 2015, 43(1): 30-35. | |
| 25 | 李炜, 李宗仁, 毛海杰. 基于反馈控制系统实时寿命预测的延寿策略研究[J]. 兰州理工大学学报,2021, 47(6): 74-83. |
| Li Wei, Li Zong-ren, Mao Hai-jie. Study on life extension strategy based on real-time life prediction of feedback control system[J]. Journal of Lanzhou University of Technology, 2021, 47(6): 74-83. |
| [1] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [4] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [5] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [6] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
| [7] | 杨志军,高忠义,王丽君,黄观新,危宇泰. 面向刚柔耦合定位平台的模型预测控制算法[J]. 吉林大学学报(工学版), 2022, 52(12): 2806-2815. |
| [8] | 彭浩楠,唐明环,查奇文,王伟忠,王伟达,项昌乐,刘玉龙. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2852-2863. |
| [9] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [10] | 贾超,徐洪泽,王龙生. 基于多质点模型的列车自动驾驶非线性模型预测控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1913-1922. |
| [11] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [12] | 唐晓峰, 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行. 基于智能空间-车框架理论的车辆行驶运动学状态的预测[J]. 吉林大学学报(工学版), 2015, 45(5): 1395-1401. |
| [13] | 许芳1, 2, 靳伟伟2, 陈虹1, 2, 张振威2. 一种模型预测控制器的FPGA硬件实现[J]. 吉林大学学报(工学版), 2014, 44(4): 1042-1050. |
| [14] | 石屹然, 田彦涛, 史红伟, 张立. 基于Modified Volterra模型的SI发动机空燃比非线性模型预测控制[J]. 吉林大学学报(工学版), 2014, 44(2): 538-547. |
| [15] | 李刚, 宗长富, 陈国迎, 洪伟, 何磊. 线控四轮独立驱动轮毂电机电动车集成控制[J]. , 2012, 42(04): 796-802. |
|
||