吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (1): 386-396.doi: 10.13229/j.cnki.jdxbgxb20190848
• 农业工程·仿生工程 • 上一篇
水稻机械除草避苗控制系统设计与试验
陈学深( ),黄柱健,马旭(),齐龙,方贵进
),黄柱健,马旭(),齐龙,方贵进
- 华南农业大学 工程学院,广州 510642
Design and test of control system for rice mechanical weeding and seedling-avoiding control
Xue-shen CHEN(),Zhu-jian HUANG,Xu MA(),Long QI,Gui-jin FANG
- College of Engineering,South China Agricultural University,Guangzhou 510642,China
摘要:
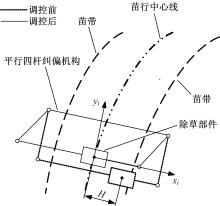
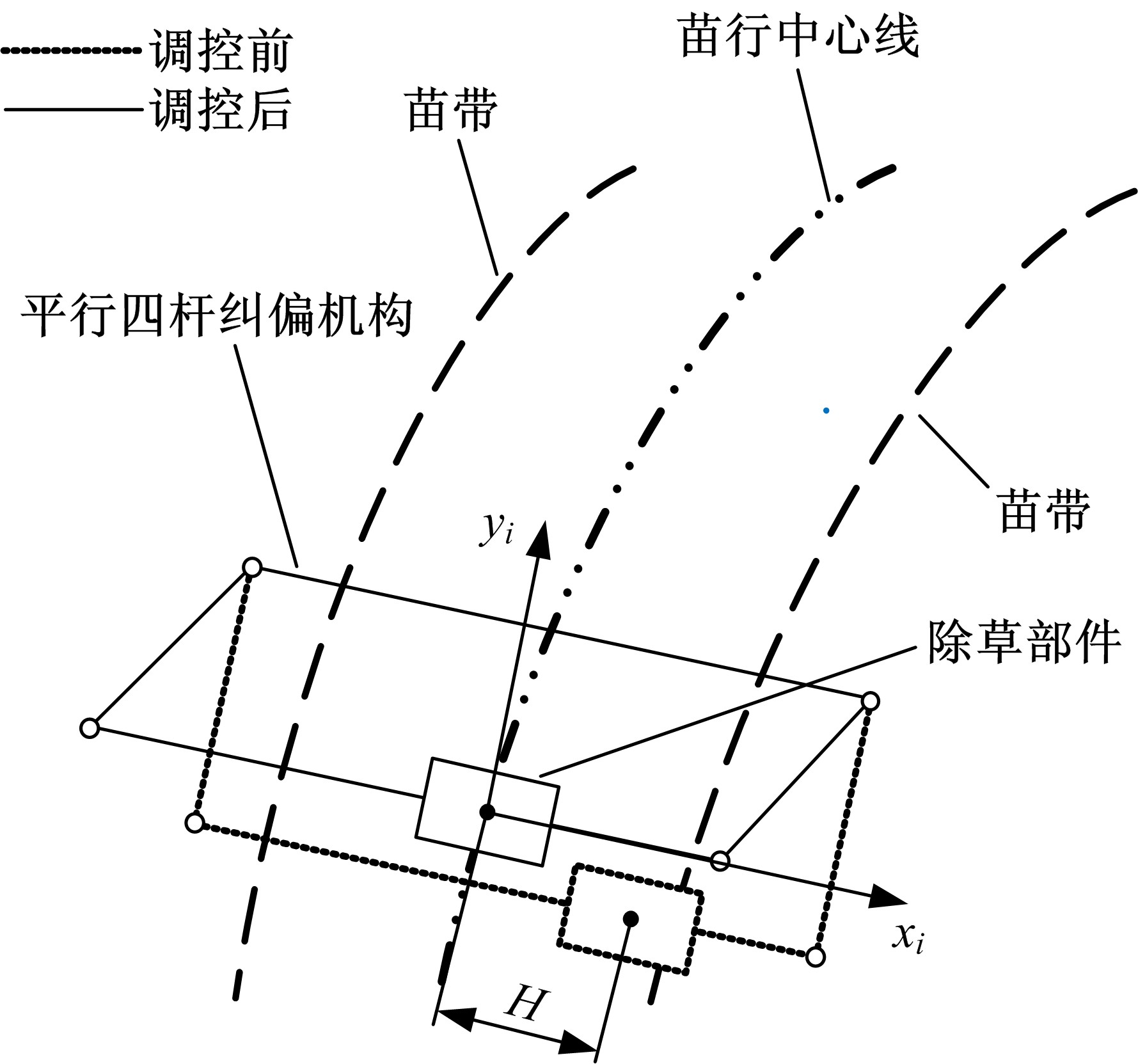
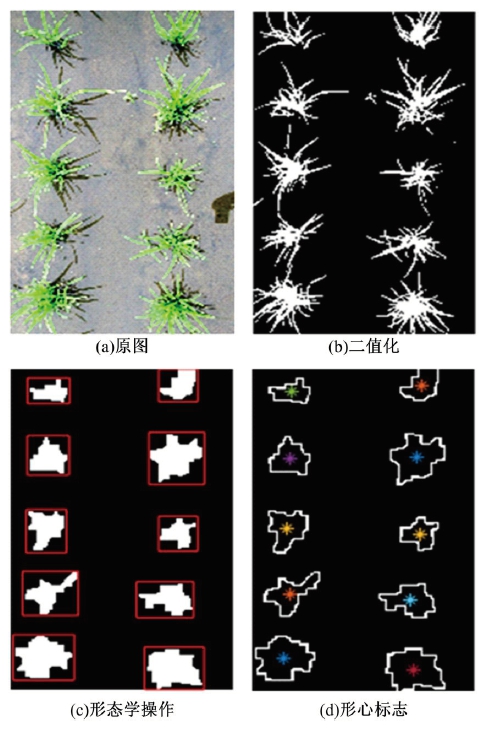
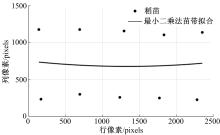
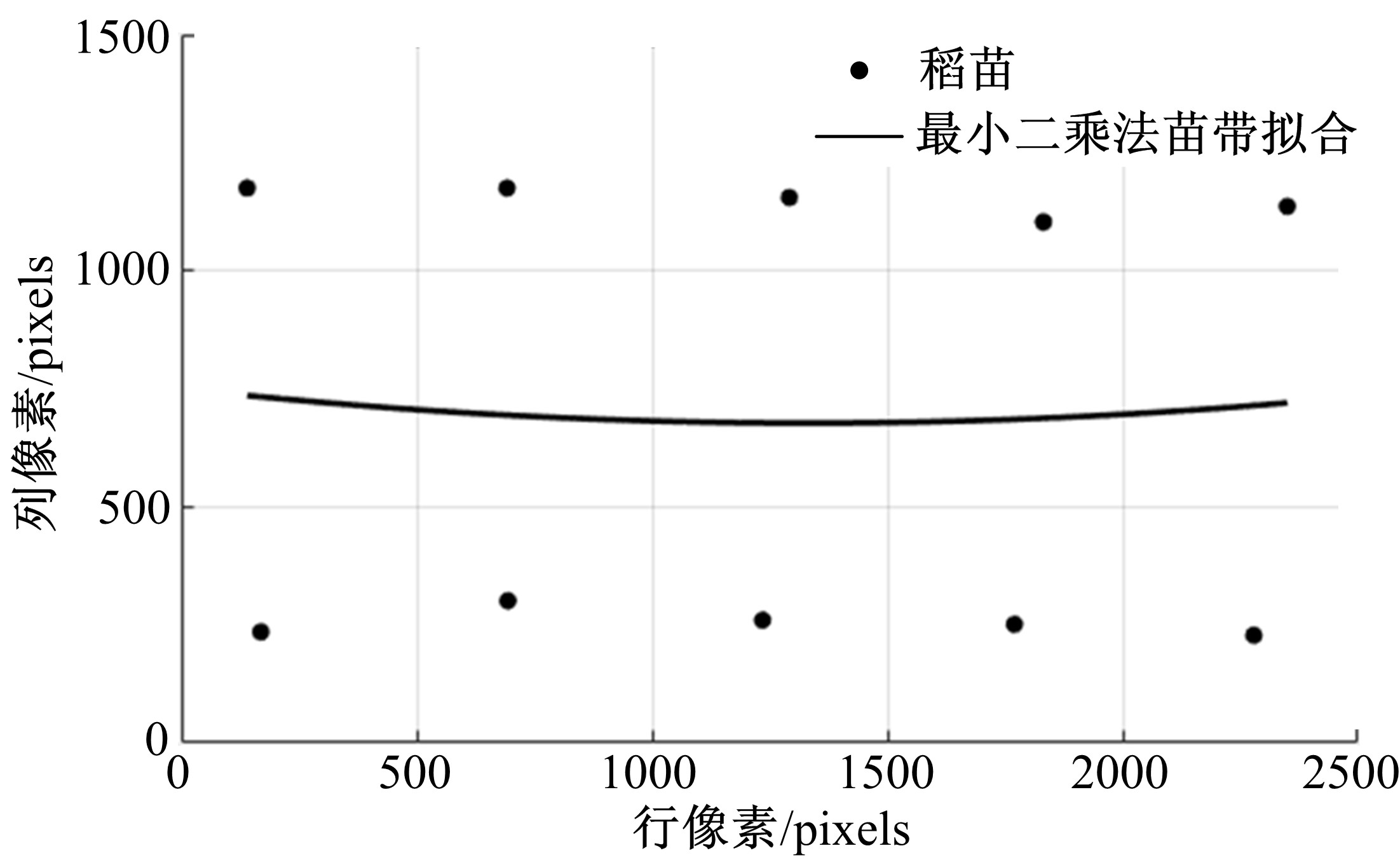
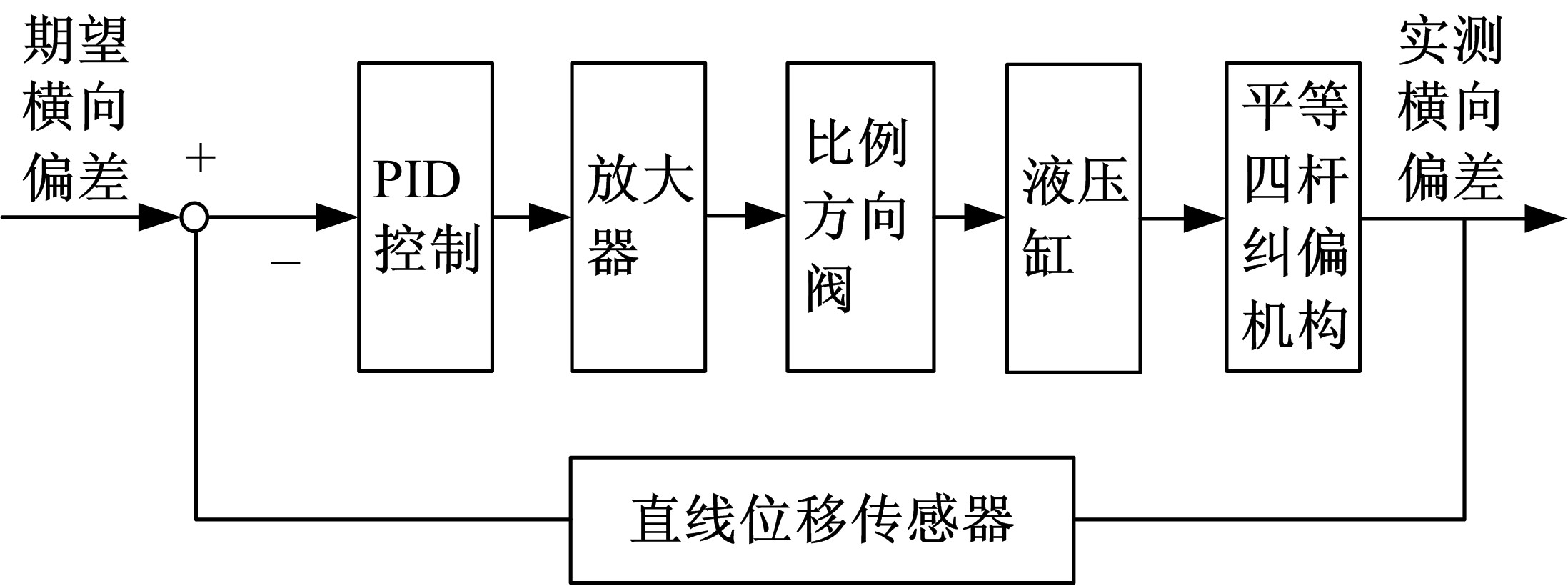
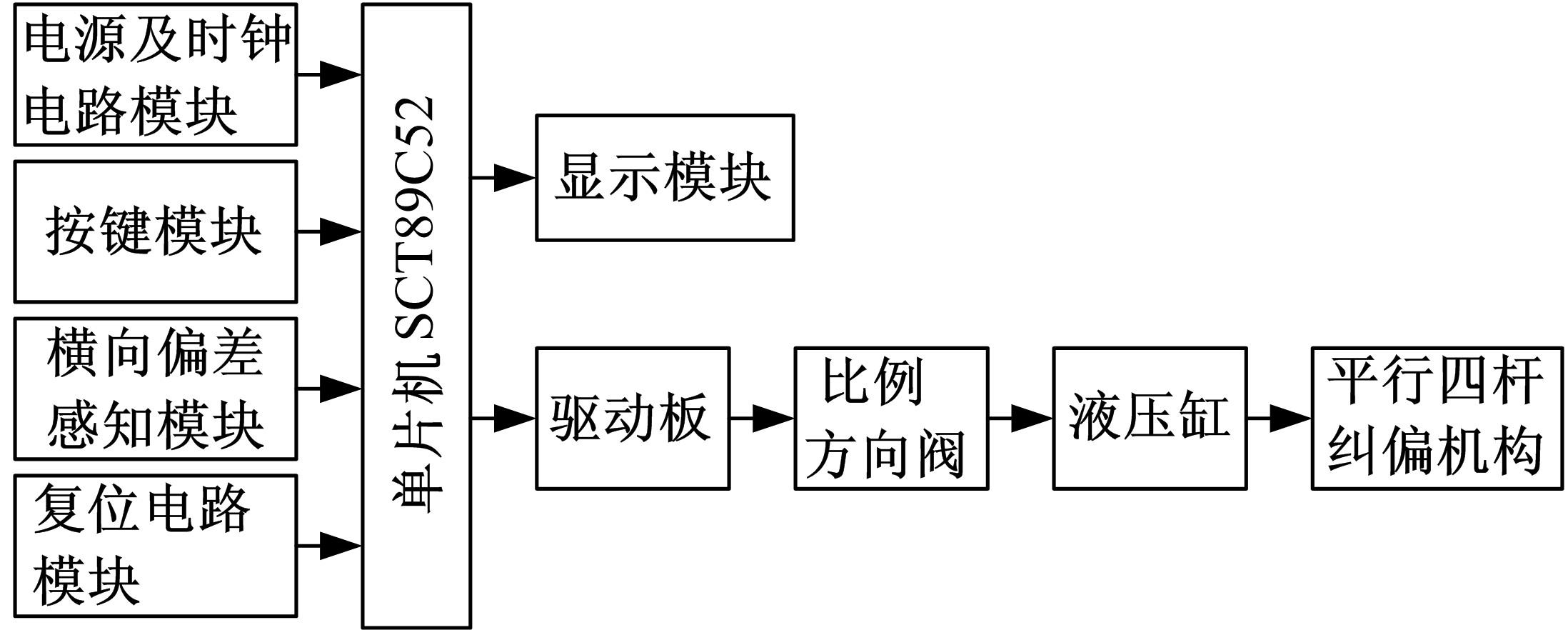
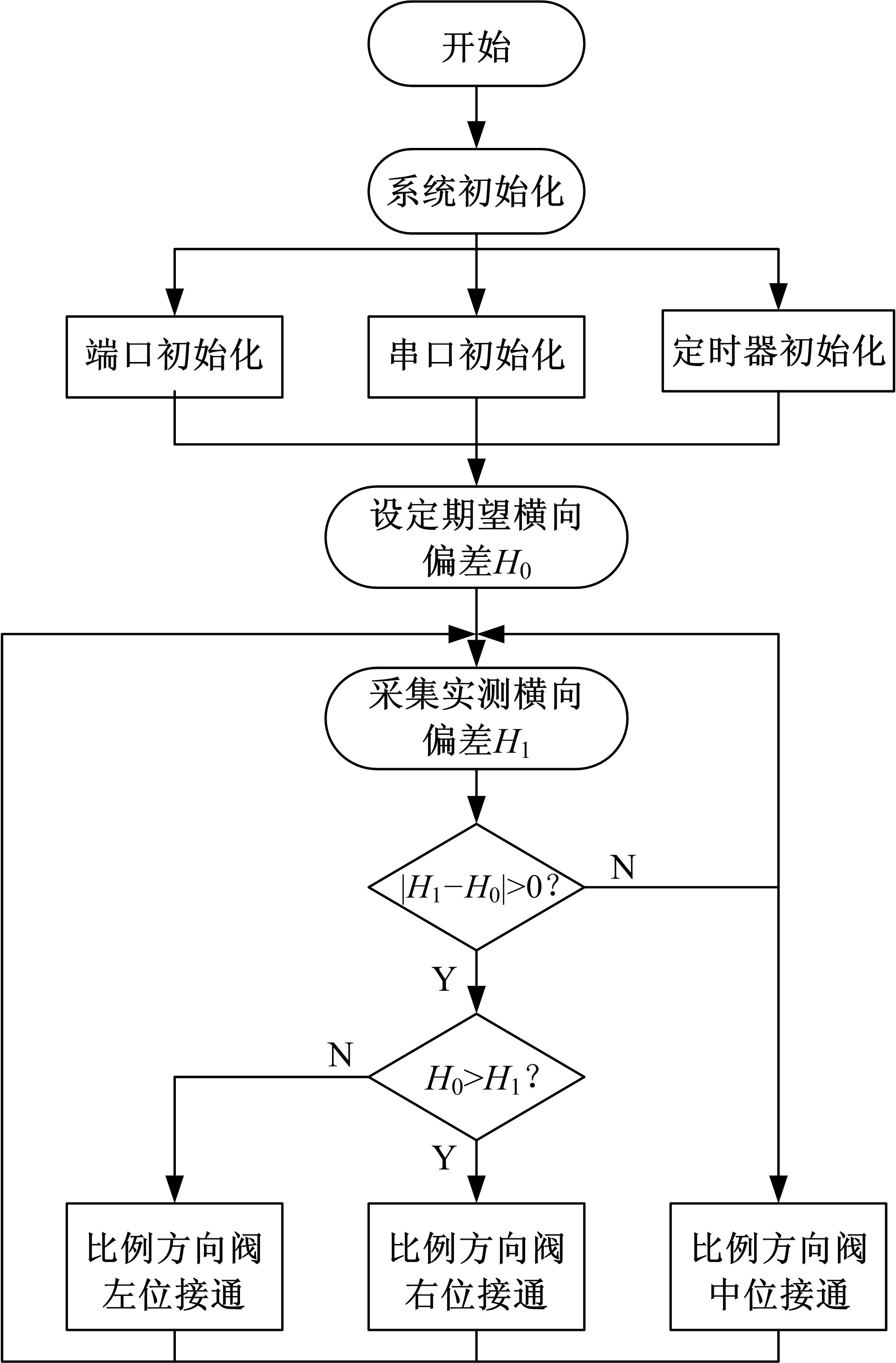
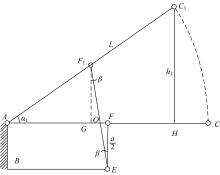
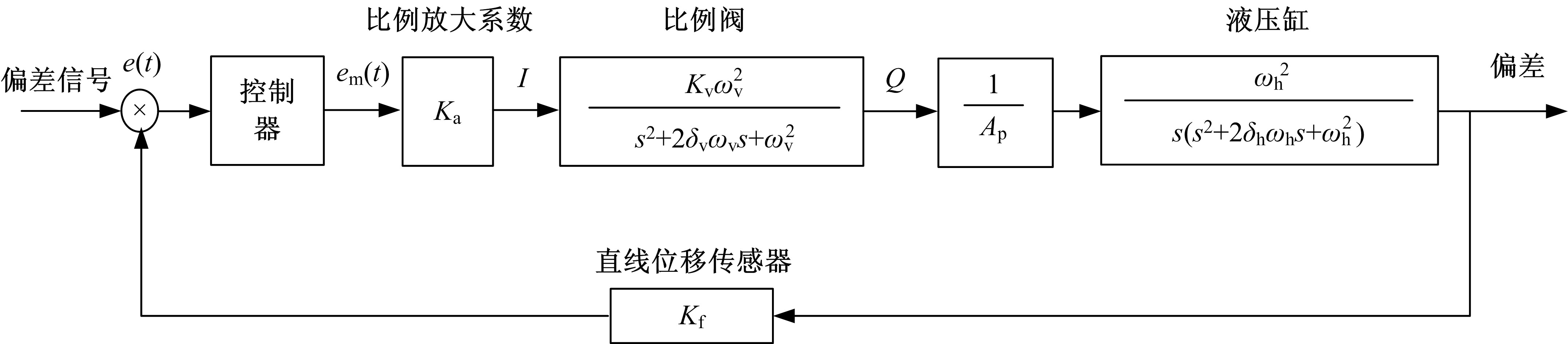
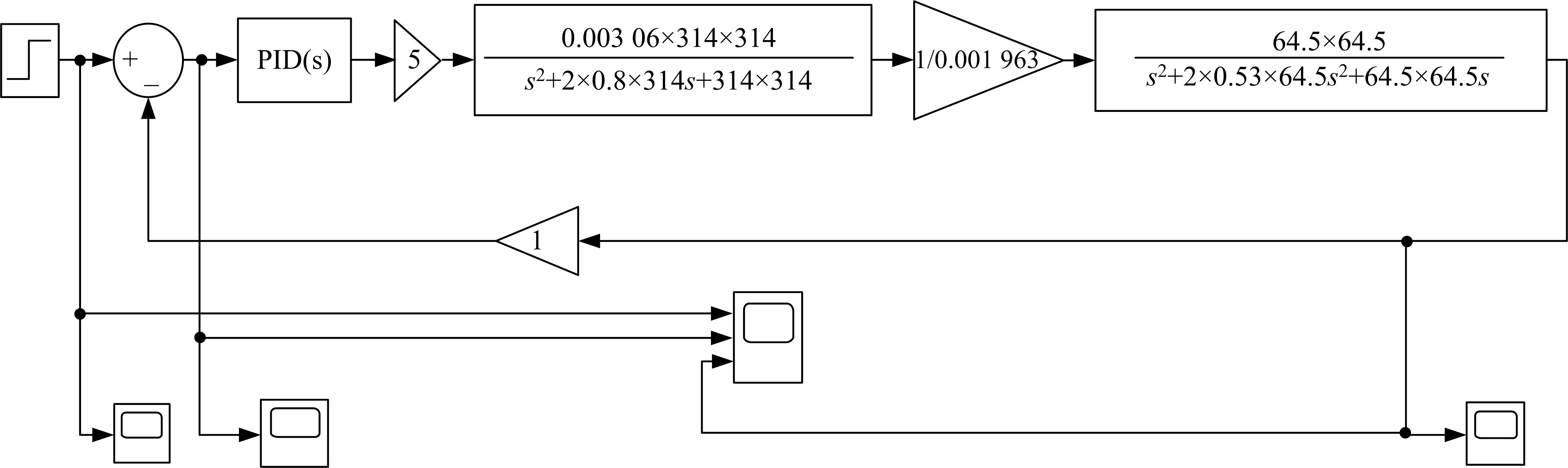
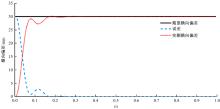
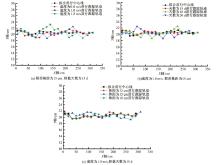
为使除草部件的作业路径能避开稻苗,降低机械除草的伤苗率,设计了一种机器视觉与液压伺服控制技术相结合的避苗控制系统。采用垂直俯拍方式,提取了稻苗冠层边界的形心图像坐标位置,通过小孔成像模型转换,获得稻苗地面坐标位置及除草部件中心与苗行中心线的距离。建立了平行四杆纠偏机构的液压控制系统模型,获得纠偏调控量与液压推杆的映射关系。基于PID 控制算法,建立了比例阀液压系统数学模型,应用Matlab/Simulink仿真表明:模型的稳态响应时间约为0.28 s,静差约为0.07 mm。进行了台架试验,结果表明:图像处理系统提取苗行中心线误差不超过3 cm;正交试验结果表明:避苗控制系统中伤苗率的影响因素主次顺序为:行进速度、移栽天数、稻苗间距,当行进速度为0.8 m/s、移栽天数为10 d、稻苗株距为12 cm时,伤苗率为2.48%。
中图分类号:
- S237








| 1 | 徐文蓉, 赵灿, 强胜, 等. 杂草稻灌浆期剑叶的叶绿素荧光特性[J]. 植物生理学报, 2017, 53(9):1742-1752. |
| Xu Wen-rong, Zhao Can, Qiang Sheng, et al. The chlorophyll fluorescence characteristics of flag leaf of weedy rice during grain filling[J]. Plant Physiology Communications, 2017, 53(9): 1742-1752. | |
| 2 | 张家源, 孙卓, 王志涛, 等. 水稻田间机械除草装备与技术现状及发展研究[J]. 内燃机与配件, 2018(15): 256-257. |
| Zhang Jia-yuan, Sun Zhuo, Wang Zhi-tao,et al. Present status and prospects of mechanical weeding equipment and technology in paddy field[J]. Internal Combustion Engine & Parts, 2018(15): 256-257. | |
| 3 | 王哲, 戎俊, 卢宝荣. 杂草稻的发生、危害与我国水稻生产面临的挑战[J]. 杂草科学, 2015, 33(1): 1-9. |
| Wang Zhe, Rong Jun, Lu Bao-rong. Occurrence and damage of weedy rice and its threats to rice production in China[J]. Weed Science, 2015, 33(1): 1-9. | |
| 4 | 马钢, 侯宪东, 张阳阳. 农田生态系统杂草生态控制策略研究[J]. 安徽农业科学, 2018, 46(17): 37-40, 43. |
| Ma Gang, Hou Xian-dong, Zhang Yang-yang. Ecological control strategy research of farmland ecosystem weeds[J]. Journal of Anhui Agricultural Sciences,2018,46(17):37-40, 43. | |
| 5 | 齐月, 李俊生, 闫冰, 等. 化学除草剂对农田生态系统野生植物多样性的影响[J]. 生物多样性, 2016, 24(2): 228-236. |
| Qi Yue, Li Jun-sheng, Yan Bing, et al. Impact of herbicides on wild plant diversity in agro-ecosystems[J]. Biodiversity Science,2016, 24(2): 228-236. | |
| 6 | 王金峰, 王金武, 闫东伟, 等. 3SCJ-2型水田行间除草机设计与试验[J]. 农业机械学报, 2017, 48(6): 71-78, 202. |
| Wang Jin-feng,Wang Jin-wu,Yan Dong-wei, et al. Design and experiment of 3SCJ-2 type row weeding machine for paddy field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6): 71-78, 202. | |
| 7 | 金凤. 化学除草剂对环境的污染及防治对策[J]. 绿色科技, 2018(8): 139-140. |
| Jin Feng. Chemical Herbicide of pesticides on envi ronment and countermeasures for prevention and control[J]. Journal of Green Science and Technology, 2018(8): 139-140. | |
| 8 | 李杨, 马智宏, 李冰茹, 等. 我国主要作物中除草剂登记情况及存在问题[J]. 食品安全质量检测学报, 2018, 9(17): 4483-4488. |
| Li Yang, Ma Zhi-hong, Li Bing-ru, et al. Registration status and existing problems of herbicides in the major crops in China[J]. Journal of Food Safety & Quality, 2018, 9(17): 4483-4488. | |
| 9 | 娄帅帅, 曹成茂, 丁冉, 等. 自走式前胡除草机的设计与试验[J]. 农机化研究, 2017, 39(9): 91-97, 106. |
| Lou Shuai-shuai, Cao Cheng-mao, Ding Ran, et al. Design and experiment on self-propelled peucedanum weeder [J]. Journal of Agricultural Mechanization Research, 2017, 39(9): 91-97, 106. | |
| 10 | 陶桂香, 王金武, 周文琪, 等. 水田株间除草机械除草机理研究与关键部件设计[J]. 农业机械学报, 2015, 46(11): 57-63. |
| Tao Gui-xiang, Wang Jin-wu, Zhou Wen-qi, et al. Herbicidal mechanism and key components design for paddy weeding device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 57-63. | |
| 11 | 齐龙, 梁仲维, 蒋郁, 等. 轻型水田除草机的设计及试验[J]. 吉林大学学报:工学版, 2016, 46(3): 1004-1012. |
| Qi Long, Liang Zhong-wei, Jiang Yu, et al. Design and field test of lightweight paddy weeder[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 1004-1012. | |
| 12 | 齐龙, 赵柳霖, 马旭, 等. 3GY-1920型宽幅水田中耕除草机的设计与试验[J]. 农业工程学报, 2017, 33(8): 47-55. |
| Qi Long, Zhao Liu-lin,Ma Xu, et al. Design and test of 3GY-1920 wide-swath type weeding-cultivating machine for paddy[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(8): 47-55. | |
| 13 | 张勤, 黄小刚, 李彬, 等. 基于彩色模型和近邻法聚类的水田秧苗列中心线检测方法[J]. 农业工程学报, 2012, 28(17): 163-171, 295-296. |
| Zhang Qin, Huang Xiao-gang, Li Bin, et al. Detection of rice seedlings rows' centerlines based on color model and nearest neighbor clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(17): 163-171, 295-296. | |
| 14 | Choi K H, Han S K, Han S H, et al. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields[J]. Computers and Electronics in Agriculture, 2015, 113: 266-274. |
| 15 | 蒋郁, 崔宏伟, 区颖刚, 等. 基于茎基部分区边缘拟合的稻株定位方法研究[J]. 农业机械学报, 2017, 48(6): 23-31, 49. |
| Jiang Yu, Cui Hong-wei, Ying-gang Ou, et al. Positioning method of rice seedlings based on edge fitting in separated region of stem base[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6): 23-31, 49. | |
| 16 | 陈勇, 田磊, 郑加强. 基于直接施药方法的除草机器人[J]. 农业机械学报, 2005, 36(10): 91-93, 129. |
| Chen Yong, Tian Lei, Zheng Jia-qiang. Development of weeding robot based on direct herbicide application method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(10): 91-93, 129. | |
| 17 | 郭伟斌, 陈勇, 侯学贵, 等. 除草机器人机械臂的逆向求解与控制[J]. 农业工程学报, 2009, 25(4): 108-112. |
| Guo Wei-bin, Chen Yong, Hou Xue-gui, et al. Inverse kinematics solving and motion control for a weeding robotic arm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(4): 108-112. | |
| 18 | Wisserodt E, Grimm J, Kemper M, et al. Gesteuerte Hacke zur Beikrautregulierung innerhalb der Reihe von Pflanzenkulturen. (Controlled hoe for weeding within crop rows)[C]∥Proceedings of the VDI-Tagung Landtechnik, Braunschweig, Germany, 1999: 155-160. |
| 19 | 胡炼, 罗锡文, 严乙桉, 等. 基于爪齿余摆运动的株间机械除草装置研制与试验[J]. 农业工程学报, 2012, 28(14): 10-16. |
| Hu Lian, Luo Xi-wen, Yan Yi-an, et al. Development and experiment of intra-row mechanical weeding device based on trochoid motion of claw tooth[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(14): 10-16. | |
| 20 | 张春龙, 黄小龙, 耿长兴, 等. 智能锄草机器人系统设计与仿真[J]. 农业机械学报, 2011, 42(7): 196-199, 185. |
| Zhang Chun-long, Huang Xiao-long, Geng Chang-xing, et al. Design and simulation of intelligent weeding robot system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(7): 196-199, 185. | |
| 21 | Hague T, Tillett N D. A bandpass filter-based approach to crop row location and tracking[J]. Mechatronics, 2001, 11(1): 1-12. |
| 22 | 齐龙, 廖文强, 马旭, 等. 水田小型除草机器人平台控制系统设计与测试[J]. 吉林大学学报:工学版, 2013, 43(4): 991-996. |
| Qi Long, Liao Wen-qiang, Ma Xu, et al. Design and testing of control system of mini-weeding-robot platform in rice paddy field[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(4): 991-996. | |
| 23 | 吕金庆, 刘志峰, 王鹏榕, 等. 驱动式碎土除草多功能马铃薯中耕机设计与试验[J]. 农业工程学报, 2019, 35(10): 1-8. |
| Jin-qing Lyu, Liu Zhi-feng, Wang Peng-rong, et al. Design and experiment of driving-type crushing-weeding multi-functional potato cultivator[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(10): 1-8. |
| [1] | 程超,付君,唐心龙,陈志,任露泉. 振动形式对水稻脱出物界面粘附规律的影响[J]. 吉林大学学报(工学版), 2019, 49(4): 1228-1235. |
| [2] | 王扬, 王晓梅, 陈泽仁, 于建群. 基于离散元法的玉米籽粒建模[J]. 吉林大学学报(工学版), 2018, 48(5): 1537-1547. |
| [3] | 王扬, 吕凤妍, 徐天月, 于建群. 大豆籽粒形状和尺寸分析及其建模[J]. 吉林大学学报(工学版), 2018, 48(2): 507-517. |
| [4] | 李俊烨, 乔泽民, 杨兆军, 张心明. 介观尺度下磨料浓度对磨粒流加工质量的影响[J]. 吉林大学学报(工学版), 2017, 47(3): 837-843. |
| [5] | 齐龙, 谭祖庭, 马旭, 陈国锐, 谢俊锋, 邝健霞. 气动振动式匀种装置工作参数的优化及试验[J]. 吉林大学学报(工学版), 2014, 44(6): 1684-1691. |
| [6] | 姚亮, 初亮, 周飞鲲, 刘明辉, 张永生, 魏文若. 纯电动轿车制动能量回收节能潜力仿真分析[J]. 吉林大学学报(工学版), 2013, 43(01): 6-11. |
| [7] | 王登峰, 季枫, 陈书明, 苏丽俐, 郝赫. 多轴重型汽车气动制动防抱死系统性能仿真与试验[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 7-12. |
| [8] | 陈晋市, 元万荣, 袁华山, 刘昕晖, 王展. 基于AMESim的滑移装载机自动调平系统[J]. , 2012, (06): 1390-1395. |
| [9] | 陈立军, 孙博, 薛宏, 刁建超. 燃烧控制系统H∞鲁棒控制器设计 [J]. , 2012, (03): 726-731. |
| [10] | 杨钫, 王庆年, 卢京民, 郑益宏. 混合动力商用车仿真模型与实车试验对比[J]. 吉林大学学报(工学版), 2010, 40(增刊): 35-0038. |
| [11] | 周海波, 马旭, 刘明亮. 精准插秧机秧盘连续输送与穴孔同步对中装置[J]. 吉林大学学报(工学版), 2009, 39(05): 1212-1217. |
| [12] | 王庆年,王军年,靳立强,胡长健,张向忠 . 用于电动轮驱动汽车的差动助力转向[J]. 吉林大学学报(工学版), 2009, 39(01): 1-6. |
| [13] | 王云成,王建华,谢飞,张宝生 . 电控限滑差速器对汽车动力性的影响[J]. 吉林大学学报(工学版), 2008, 38(增刊): 18-0022. |
| [14] | 孙中辉,李幼德,孙中红,郭彦颖 . 改进的车辆平顺性模型[J]. 吉林大学学报(工学版), 2008, 38(03): 497-0503. |
| [15] | 李成;郑艳萍;铁瑛 . 纤维排列方向对含圆孔的各向异性板应力场影响的仿真分析[J]. 吉林大学学报(工学版), 2008, 38(03): 544-0547. |
|
||