吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (8): 2167-2173.doi: 10.13229/j.cnki.jdxbgxb.20221332
橡胶鞋底弹性打磨仿真及试验
刘洋( )
)
- 湖南师范大学 工程与设计学院,长沙 410081
Simulation and experiment of elastic roughing for rubber shoe
Yang LIU()
- College of Engineering and Design,Hunan Normal University,Changsha 410081,China
摘要:
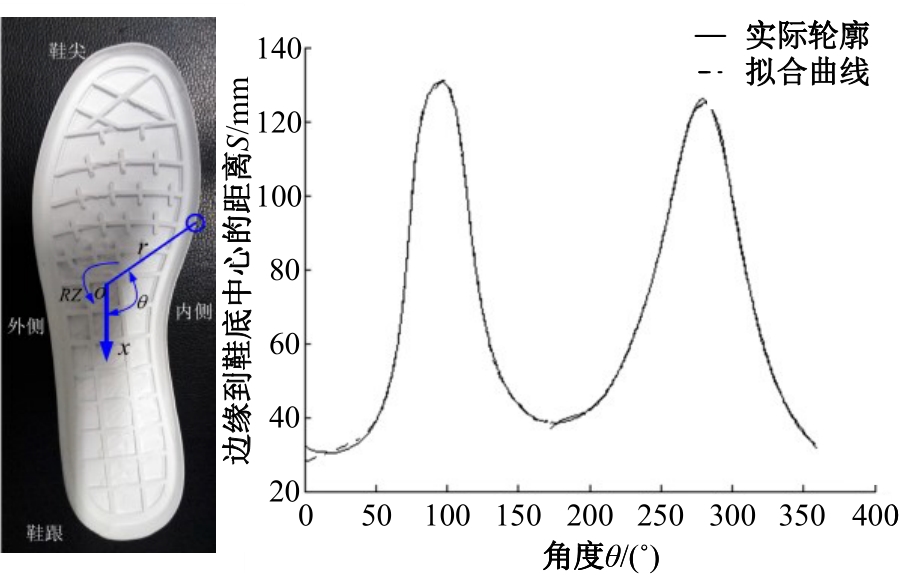
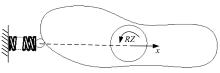
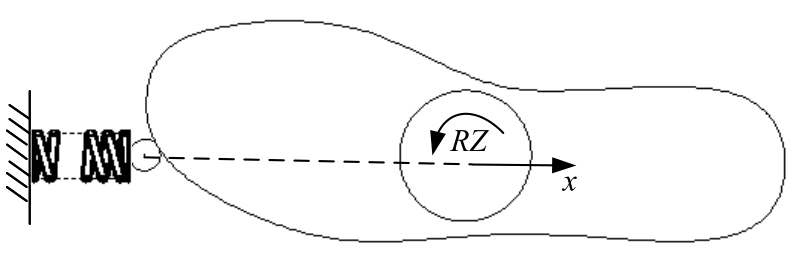
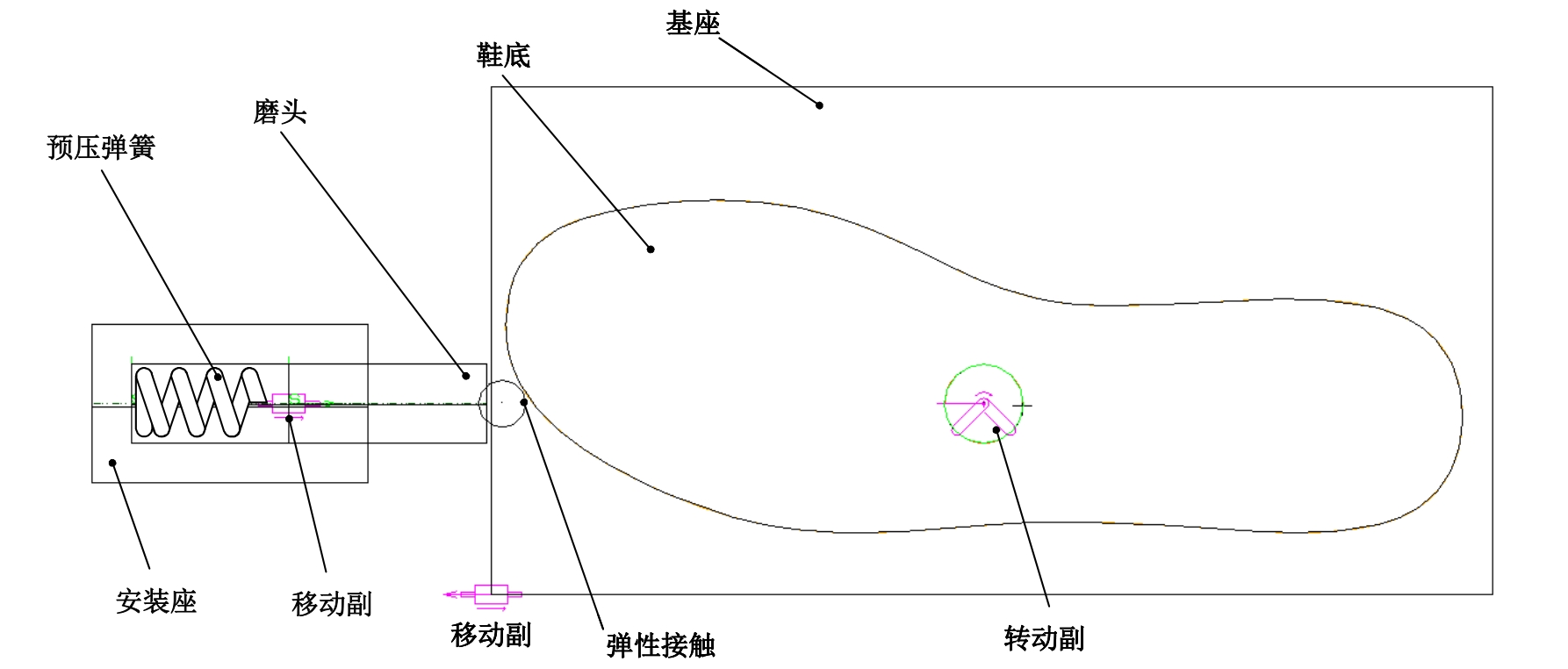
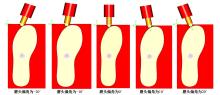
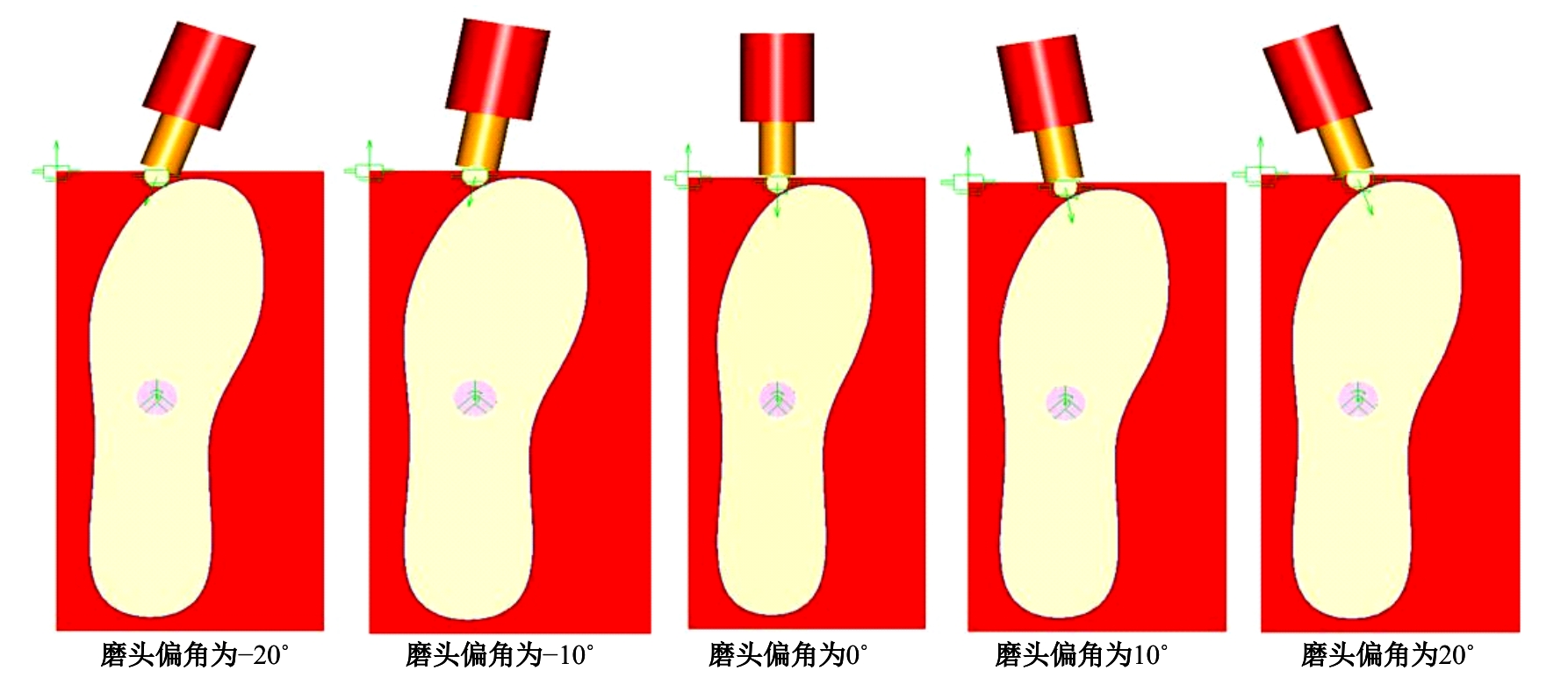
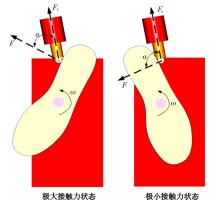
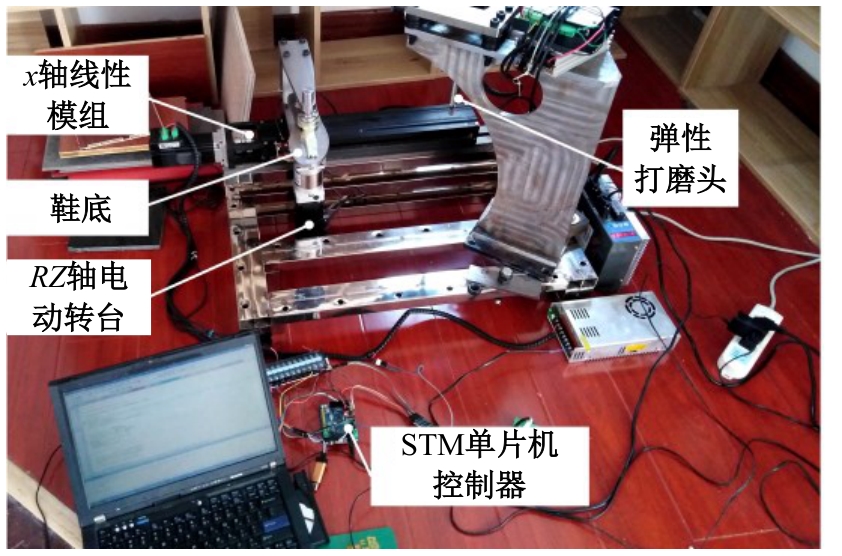
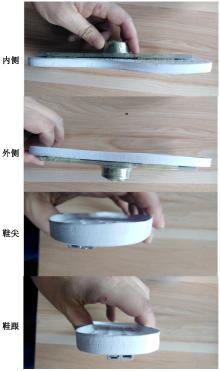
为解决含轮廓误差的鞋底自动打磨问题,提出了弹性打磨方法。首先,将鞋底轮廓分为理论轮廓和制造误差两部分,由鞋底两自由度运动跟踪鞋底的理论轮廓,由弹性磨头的接触变形适应鞋底的制造误差,建立描述鞋底轮廓的数学模型;其次,将磨头力控与鞋底运动控制相结合,建立弹性打磨机构的动力学模型,仿真不同磨头偏角条件下鞋底与磨头之间的接触力,研究弹性打磨的关键参数;最后,开发了鞋底弹性打磨试验系统,验证了弹性打磨的可行性和有效性。
中图分类号:
- TP242.3






| 1 | 李恒, 沈辉, 吕明明, 等. 全自动鞋底磨边机研制[J]. 机械制造与自动化, 2013, 42(3): 175-177. |
| Li Heng, Shen Hui, Ming-ming Lyu, et al. Development of full-automatic sole edge grinding machine[J]. Machine Building & Automation, 2013, 42(3): 175-177. | |
| 2 | Zhao L X, Zhang J, Gao L M. Path optimization for uniform removal pre-polishing of optical glass with industrial robots[J]. Optical Engineering, 2022, 61(4):045104. |
| 3 | Zhang C, Tang Z, Li K L, et al. A polishing robot force control system based on time series data in industrial internet of things[J]. Acm Transactions on Internet Technology, 2021, 21(2): 1-22. |
| 4 | 赵扬, 赵继, 张雷, 等. 基于逆向工程的机器人磨削叶片[J]. 吉林大学学报: 工学版, 2009, 39(5): 1176-1180. |
| Zhao Yang, Zhao Ji, Zhang Lei, et al. Robotic blade grinding based on reverse engineering[J]. Journal of Jilin University (Engieering and Technology Edition), 2009, 39(5): 1176-1180. | |
| 5 | 张立彬, 周邦达, 沈遥, 等. 基于工业机器人的鞋帮打磨系统设计[J]. 高技术通讯, 2020, 30(8): 822-830. |
| Zhang Li-bin, Zhou Bang-da, Shen Yao, et al. Design of upper grinding system based on industrial robot[J]. High Technology Letters, 2020, 30(8): 822-830. | |
| 6 | Kim M G, Kim J, Chung S Y, et al. Robot-based automation for upper and sole manufacturing in shoe production[J]. Machines, 2022, 10(4): 1004255. |
| 7 | . 普通运动鞋 [S]. |
| 8 | Luh Y P, Huang L C, Lu H J, et al. A smart manufacturing solution for multi-axis dispenser motion planning in mixed production of shoe soles[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2020, 7: 769-779. |
| 9 | 武传宇, 贺磊盈, 李秦川, 等. 鞋底曲面数据提取与喷胶轨迹的自动生成方法[J]. 机械工程学报, 2008, 44(8): 85-89. |
| Wu Chuan-yu, He Lei-ying, Li Qin-chuan, et al. Method for extraction of information of shoe upper and for automatic generation of spraying trajectory[J]. Chinese Journal of Mechanical Engineering, 2008, 44(8): 85-89. | |
| 10 | Wang A G, Shen W P, Wu C Y. Research on a new extraction method of laser light stripes center based on soles information scanned[J]. Journal of Mechanical & Electrical Engineering, 2010, 27(2): 21-23. |
| 11 | 赵国如, 任露泉, 田丽梅, 等. 利用逆向制造系统集成技术开发仿生防粘鞋底[J]. 吉林大学学报: 工学版, 2005, 35(6): 87-91. |
| Zhao Guo-ru, Ren Lu-quan, Tian Li-mei, et al. Exploiting biomimetic anti-adhesive shoe soles using reverse manufacturing system integration technology[J]. Journal of Jilin University (Engieering and Technology Edition), 2005, 35(6): 87-91. | |
| 12 | 袁海兵. 一种自适应鞋底打磨机构[P].中国专利:CN201821020354.2, 2019-05-24. |
| 13 | Pedrocchi N, Villagrossi E, Cenati C, et al. Design of fuzzy logic controller of industrial robot for roughing the uppers of fashion shoes[J]. The International Journal of Advanced Manufacturing Technology. 2015, 77: 939-953. |
| 14 | Corporation MSC. ADAMS / Solver online help version[EB /OL]. [2022-10-13]. |
| [1] | 王琛,雒特,惠倩倩,王忠昊,王方方. 面向分体式飞行汽车对接锁定的机电系统设计与验证[J]. 吉林大学学报(工学版), 2024, 54(8): 2130-2140. |
| [2] | 刘洋,江涛. 计及安装角的六自由度平台虎克铰干涉计算模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1519-1527. |
| [3] | 谭晓丹,王勇澎,Hall Robert,徐天爽,黄庆学. 面向电铲自主装卸的矿用自卸车斗型优化[J]. 吉林大学学报(工学版), 2024, 54(5): 1227-1236. |
| [4] | 孙伟,杨俊. 等角贴敷压电分流片圆柱壳有限元建模及减振分析[J]. 吉林大学学报(工学版), 2024, 54(2): 365-374. |
| [5] | 胡斌,蔡一全,罗昕,毛自斌,李俊伟,郭孟宇,王剑. 基于种群胁迫的有限齿侧空间高速充种理论与试验[J]. 吉林大学学报(工学版), 2024, 54(2): 574-588. |
| [6] | 刘洋. 动臂塔机防后倾缓冲力计算方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2785-2794. |
| [7] | 赵洋,肖洋,孙皓,霍文浩,冯松,廖勇. 基于围道积分的润滑接触齿轮微点蚀损伤特征模拟[J]. 吉林大学学报(工学版), 2022, 52(4): 799-810. |
| [8] | 郑伟,孙见君,马晨波,於秋萍,张玉言,牛韬. 汽车轮毂加工夹具的研究现状及展望[J]. 吉林大学学报(工学版), 2022, 52(1): 25-36. |
| [9] | 陈魏,雷雨龙,李兴忠,付尧,扈建龙,侯利国. 低速工况下渐开线圆柱直齿轮齿面粘着磨损计算[J]. 吉林大学学报(工学版), 2021, 51(5): 1628-1634. |
| [10] | 郭震,于红英,滑忠鑫,赵娣. 刚性折纸机构运动分析及折叠过程仿真[J]. 吉林大学学报(工学版), 2020, 50(1): 66-76. |
| [11] | 朱伟,王传伟,顾开荣,沈惠平,许可,汪源. 一种新型张拉整体并联机构刚度及动力学分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1777-1786. |
| [12] | 毛宇泽, 王黎钦. 鼠笼支撑一体化结构对薄壁球轴承承载性能的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1508-1514. |
|