吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 3069-3078.doi: 10.13229/j.cnki.jdxbgxb.20250531
• 通信与控制工程 • 上一篇
基于Level-K的智能驾驶汽车无信控交叉路口决策方法
李寿涛1,2( ),贾湘怡1,2,朱军2,郭洪艳1,2(),于丁力3
),贾湘怡1,2,朱军2,郭洪艳1,2(),于丁力3
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
3.利物浦约翰摩尔大学 工程与技术学院,利物浦 L33A
Uncontrolled intersections decision⁃making method for intelligent driving vehicles based on Level⁃K
Shou-tao LI1,2(),Xiang-yi JIA1,2,Jun ZHU2,Hong-yan GUO1,2(),Ding-li YU3
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
3.School of Engineering and Technology,Liverpool John Moores University,Liverpool L33AF,UK
摘要:
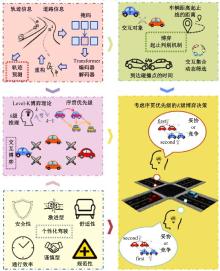
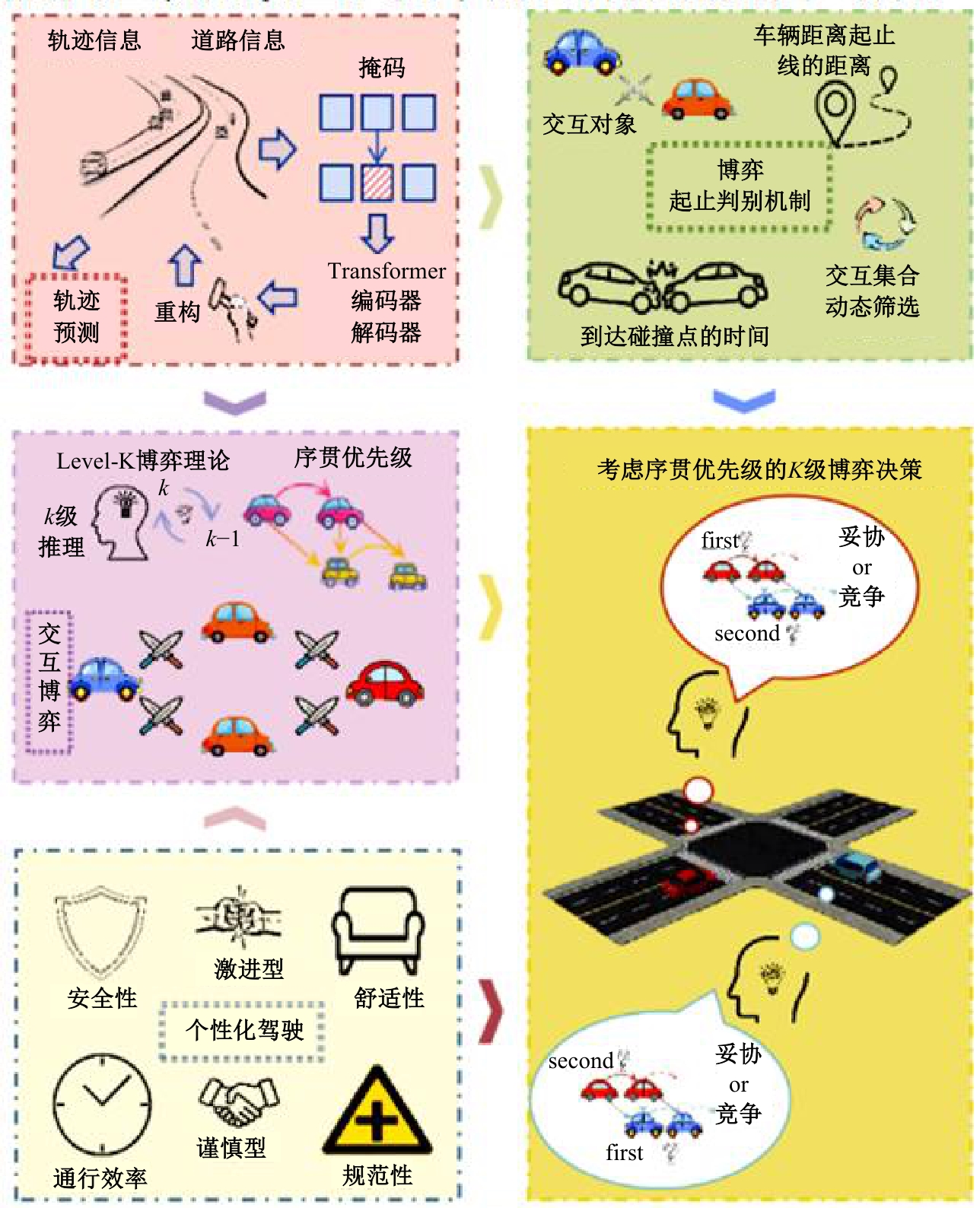
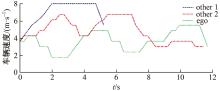
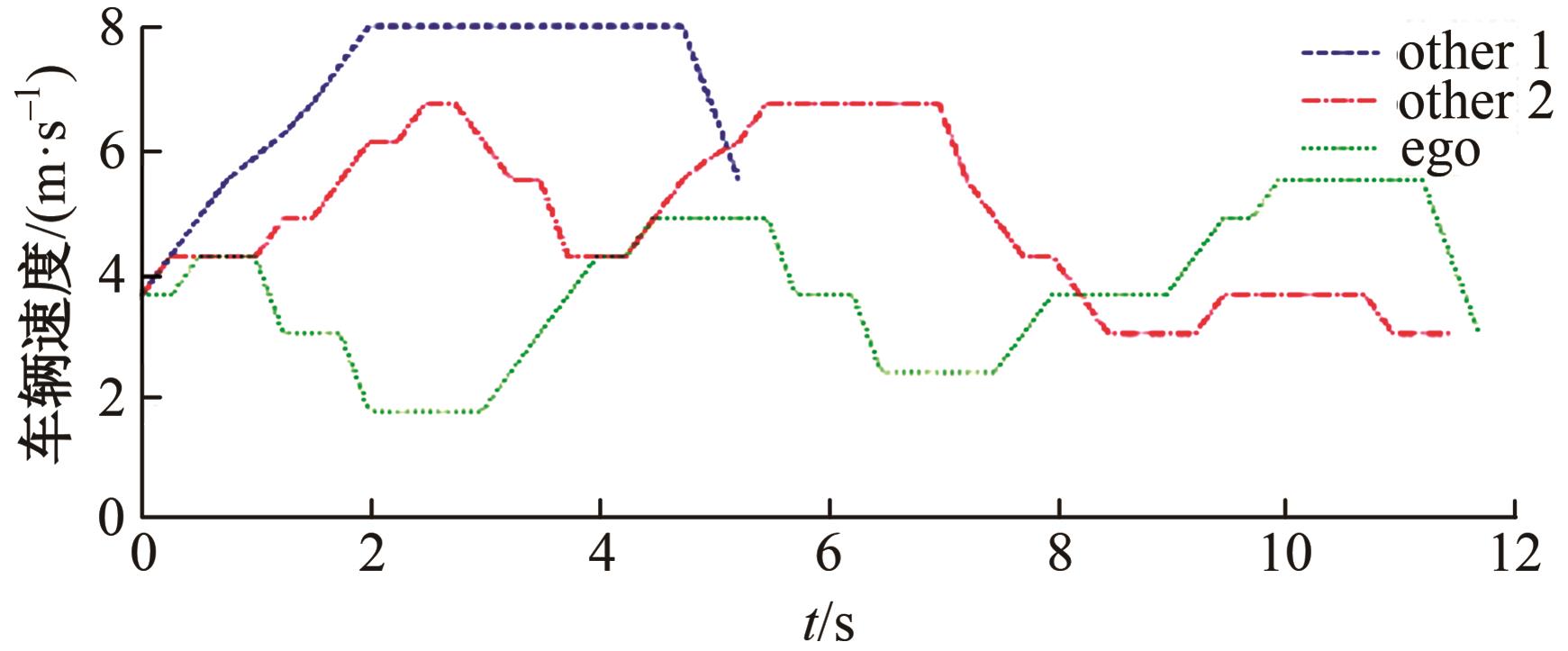
为了使智能驾驶汽车安全、合理地通过无信控交叉路口,提出了一种基于Level-K博弈模型的序贯决策方法。首先,通过轨迹预测和车辆间的相关性分析,对车辆推理等级进行初始划分,在此基础上,将序贯优先级概念引入改进的Level-K博弈框架中,从而构建无信控交叉路口决策模型。其次,为减少车辆间不必要的交互、降低决策模型计算的复杂度,提出了一种博弈起止判别机制,对参与博弈的对象进行动态筛选。同时,为了保证决策的安全性,又提出了一种矩形车辆模型,对车辆的碰撞风险进行评估。最后,通过实验验证本文方法的有效性。结果表明,本文方法可以有效避免潜在碰撞风险,使智能驾驶汽车能够安全、合理地通过交叉路口。
中图分类号:
- TP273
| [1] | Hang P, Lv C, Xing Y, et al. Human-like decision making for autonomous driving: a noncooperative game theoretic approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(4): 2076-2087. |
| [2] | Chu H Q, Guo L L, Yan Y J, et al. Self-learning optimal cruise control based on individual car-following style[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10): 6622-6633. |
| [3] | 高振海,孙天骏,何磊.汽车纵向自动驾驶的因果推理型决策[J].吉林大学学报: 工学版, 2019, 49(5):1392-1404. |
| Gao Zhen-hai, Sun Tian-jun, He Lei. Causal inference-based decision making for longitudinal autonomous driving of vehicles[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(5): 1392-1404. | |
| [4] | Choi E H. Crash factors in intersection-related crashes: an on-scene perspective[R]. Washington, DC: US Dept of Transportation, National Highway Traffic Safety Administration,2010. |
| [5] | Shirazi M S, Morris B T. Looking at intersections: A survey of intersection monitoring, behavior and safety analysis of recent studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(1): 4-24. |
| [6] | 朱冰, 贾士政, 赵健, 等. 考虑主观认知的自动驾驶汽车序贯博弈类人决策[J]. 汽车工程, 2025, 47(1): 13-22. |
| Zhu Bing, Jia Shi-zheng, Zhao Jian, et al. Sequential game-based human-like decision-making for autonomous vehicles considering subjective cognition[J]. Automotive Engineering, 2025, 47(1): 13-22. | |
| [7] | Li N, Yao Y, Kolmanovsky I, et al. Game-theoretic modeling of multi-vehicle interactions at uncontrolled intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(2): 1428-1442. |
| [8] | Tian R, Li N, Kolmanovsky I, et al. Game-theoretic modeling of traffic in unsignalized intersection network for autonomous vehicle control verification and validation[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(3): 2211-2226. |
| [9] | Jia S Z, Zhang Y X, Li X, et al. Interactive decision-making with switchable game modes for automated vehicles at intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(11): 11785-11799. |
| [10] | Sankar G S, Han K. Adaptive robust game-theoretic decision making strategy for autonomous vehicles in highway[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14484-14493. |
| [11] | Cheng J, Mei X D, Liu M. Forecast-MAE: self-supervised pre-training for motion forecasting with masked autoencoders[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision,Paris, France, 2023: 8679-8689. |
| [12] | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 6000-6010. |
| [13] | Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017: 2117-2125. |
| [14] | Qi C R, Su H, Mo K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017: 652-660. |
| [15] | He K M, Chen X L, Xie S N, et al. Masked autoencoders are scalable vision learners[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 2022: 16000-16009. |
| [1] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [2] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [3] | 朱冰,孟鹏翔,刘斌,韩嘉懿,赵健,陈志成,宋东鉴,陶晓文. 基于交通环境信息的虚拟车道线拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2935-2945. |
| [4] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [5] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [6] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [7] | 赵睿,袁其瑞,连家俊,高菲,胡宏宇,高镇海. 考虑双重不确定性的智能车辆碰撞风险评估[J]. 吉林大学学报(工学版), 2025, 55(8): 2597-2610. |
| [8] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [9] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [10] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [11] | 王健,贾晨威. 面向智能网联车辆的轨迹预测模型[J]. 吉林大学学报(工学版), 2025, 55(6): 1963-1972. |
| [12] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [13] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [14] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [15] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
|
||