吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 741-748.doi: 10.13229/j.cnki.jdxbgxb.20220473
• 交通运输工程·土木工程 • 上一篇
基于改进YOLOv4-tiny算法的车距预警方法
王宏志( ),宋明轩,程超,解东旋()
),宋明轩,程超,解东旋()
- 长春工业大学 计算机科学与工程学院,长春 130012
Vehicle distance warning method based on improved YOLOv4⁃tiny algorithm
Hong-zhi WANG(),Ming-xuan SONG,Chao CHENG,Dong-xuan XIE()
- College of Computer Science and Engineering,Changchun University of Technology,Changchun 130012,China
摘要:
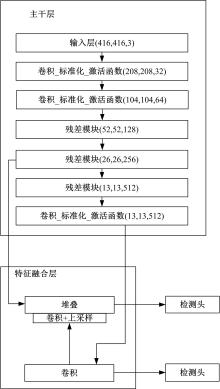
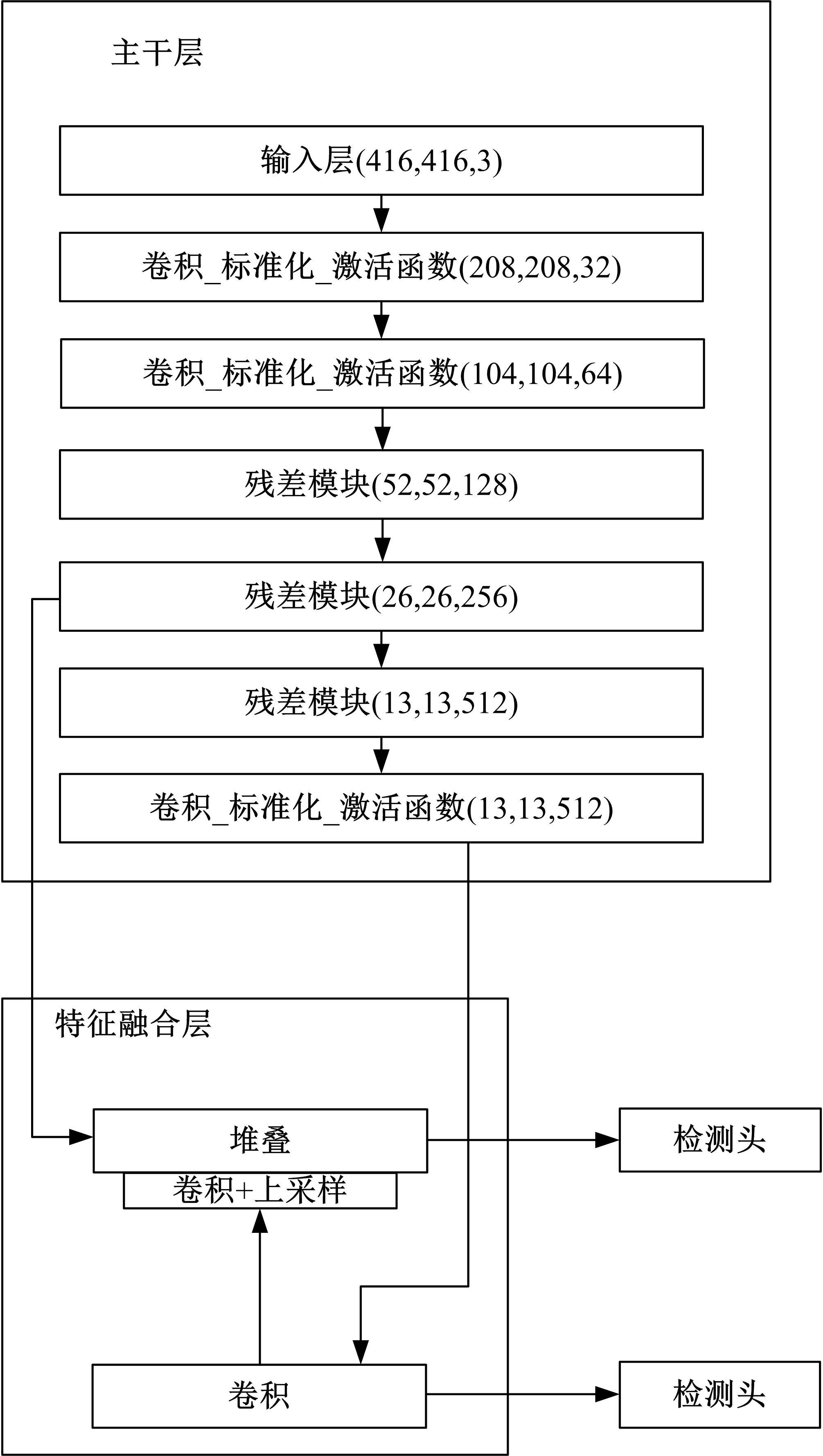
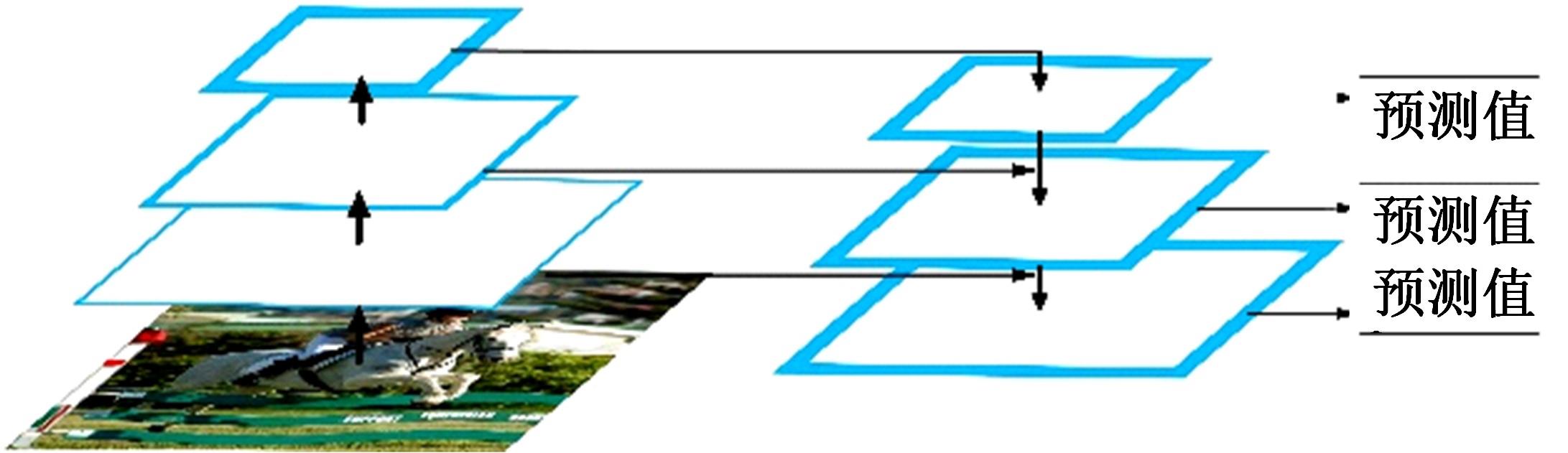
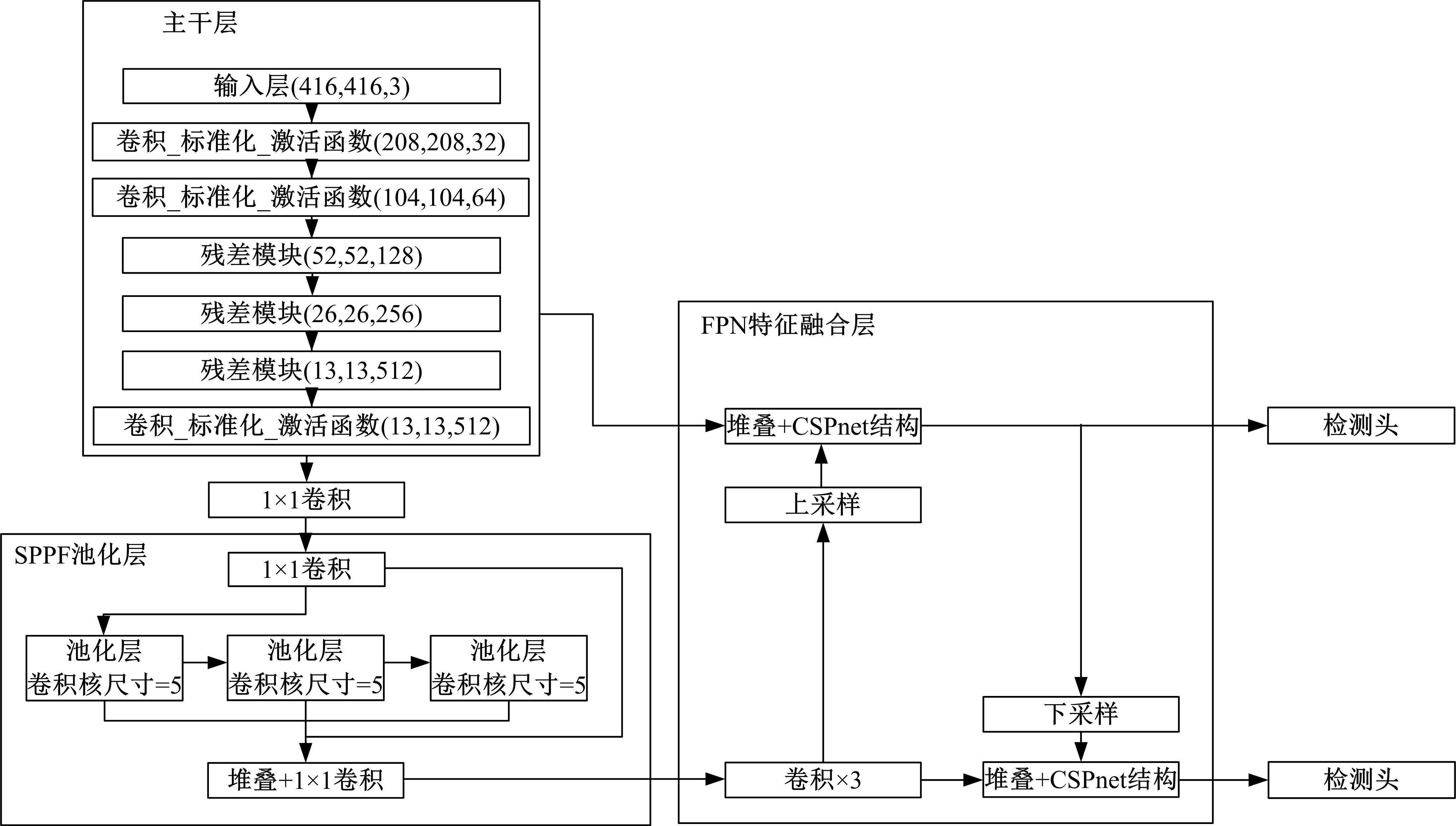
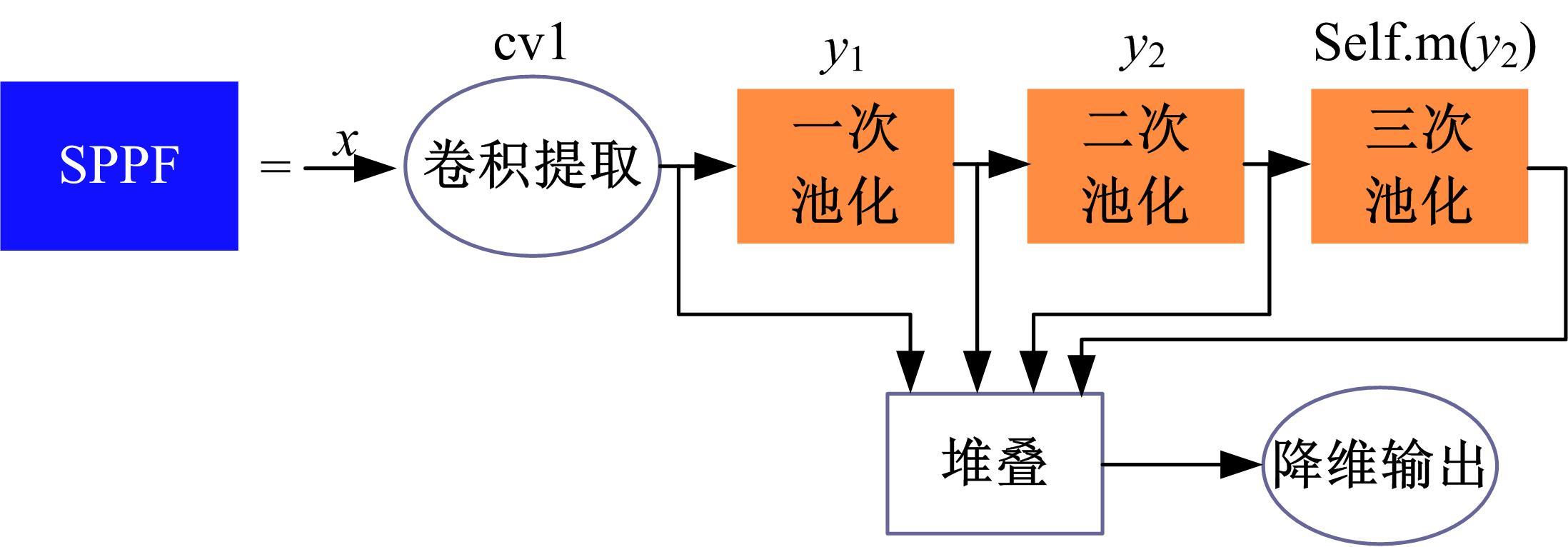
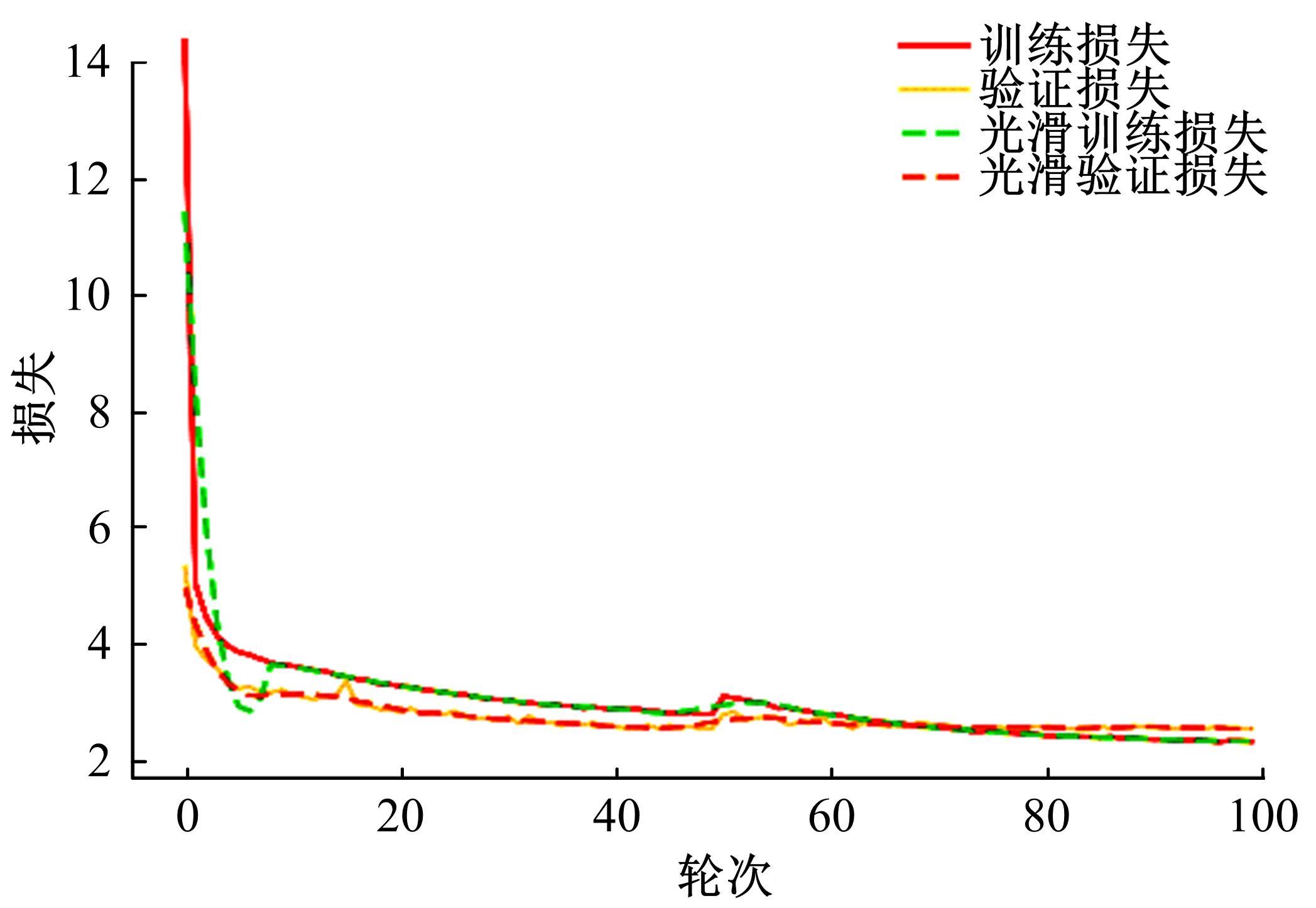
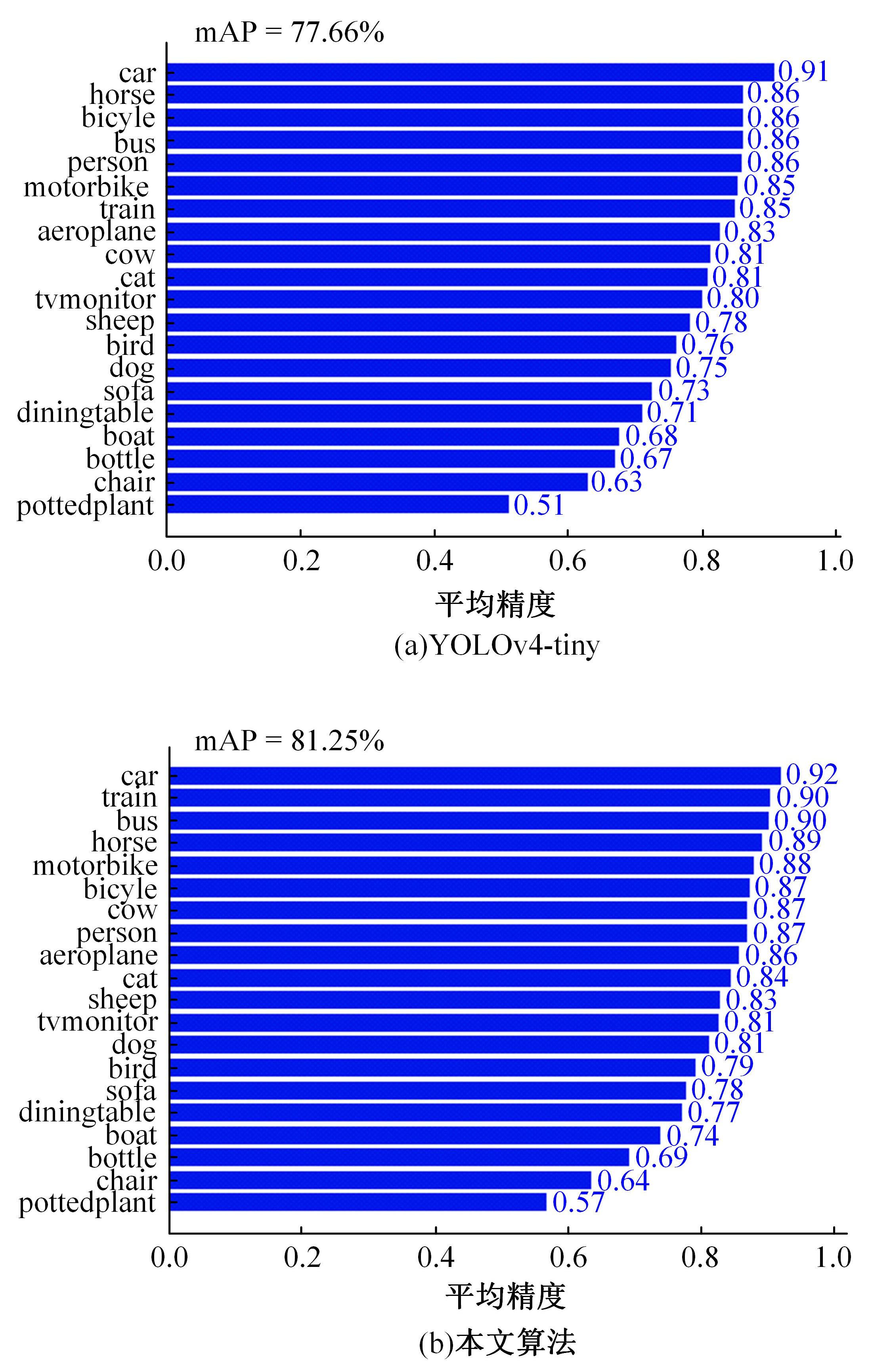
针对现有网络难以实时精确识别道路检测目标及车距的问题,提出了一种基于改进YOLOv4-tiny算法的车距预警方法。首先,总结了YOLOv4-tiny算法的特征提取结构,分析了原网络结构的不足之处。其次,在原网络中增加了空间金字塔池化层SPPF进一步提取目标特征,增强深层次语义信息表达能力,并将特征金字塔网络(FPN)结构添加下采样通道和CSPnet层,充分融合多尺度图像特征,避免浅层信息丢失。最后,使用Mosaic数据增强方法丰富数据集训练样本,并将改进YOLOv4-tiny算法与单目测距原理相结合,依据车距大小设置3种级别的信息提示进行车距预警实验。结果表明:本文算法在PASCAL VOC数据集上的检测速度为43 帧/s,平均精度达到81.25%,较YOLOv4-tiny算法提高了3.59%。可见,改进YOLOv4-tiny算法在满足检测实时性要求的同时,具备良好的目标检测精度,对提升车距预警方法的使用效果具有指导意义。
中图分类号:
- U492.8










| 1 | 王新竹, 李骏, 李红建, 等. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报: 工学版, 2016, 46(2): 360-365. |
| Wang Xin-zhu, Li Jun, Li Hong-jian, et al. Obstacle detection method for autonomous vehicles based on 3D lidar and depth image[J]. Journal of Jilin University (Engineering Science), 2016, 46(2): 360-365. | |
| 2 | 周俊静, 段建民, 杨光祖. 基于雷达测距的车辆识别与跟踪方法[J]. 汽车工程, 2014, 36(11): 1415-1420. |
| Zhou Jun-jing, Duan Jian-min, Yang Guang-zu. Vehicle recognition and tracking method based on radar ranging[J]. Automotive Engineering, 2014, 36(11): 1415-1420. | |
| 3 | 邹斌, 袁宇翔. 面向智能交通的单目视觉测距方法研究[J]. 交通运输系统工程与信息, 2018, 18(4): 46-53. |
| Zou Bin, Yuan Yu-xiang. Research on monocular visual ranging method for intelligent transportation[J]. Transportation Systems Engineering and Information, 2018, 18(4): 46-53. | |
| 4 | 李琳辉, 伦智梅, 连静, 等. 基于卷积神经网络的道路车辆检测方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 384-391. |
| Li Lin-hui, Zhi-mei Lun, Lian Jing, et al. Road vehicle detection method based on convolutional neural network[J]. Journal of Jilin University (Engineering Edition), 2017, 47(2): 384-391. | |
| 5 | 文学志, 方巍, 郑钰辉. 一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J]. 电子学报, 2011, 39(5): 1121-1126. |
| Wen Xue-zhi, Fang Wei, Zheng Yu-hui. A vehicle recognition algorithm based on Haar-like features andimproved AdaBoost classifier[J]. Journal of Electronis, 2011, 39(5): 1121-1126. | |
| 6 | Lienhart R, Maydt J. An extended set of Haar-like features for rapid object detection[J/OL]. [2022-03-15]. |
| 7 | Dooley D, Mcginley B, Hughes C, et al. A blind-zone detection method using a rear-mounted fisheye camera with combination of vehicle detection methods[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(1): 264-278. |
| 8 | Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥Proceedings of 2014 IEEE International Conference on Computer Vision and Pattern Recognition, Columbus, USA, 2014: 580-587. |
| 9 | Girshick R. Fast R-CNN[C]∥Proceedings of 2015 IEEE International Conference on Computer Vision, San-tiago, Chile, 2015: 1440-1448. |
| 10 | He K, Xiang Y, Shao Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2014, 37(9): 1904-1916. |
| 11 | Ren S, He K, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 12 | 彭博, 蔡晓禹, 唐聚, 等. 基于改进Faster R-CNN的无人机视频车辆自动检测[J]. 东南大学学报: 自然科学版, 2019, 49(6): 1199-1204. |
| Peng Bo, Cai Xiao-yu, Tang Ju, et al. Automatic detection of UAV video vehicles based on improved Faster R-CNN[J]. Journal of Southeast University (Natural Science Edition), 2019, 49(6): 1199-1204. | |
| 13 | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 779-788. |
| 14 | Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]∥IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, USA, 2017: 6517-6525. |
| 15 | Redmon J, Farhadi A. YOLOv3: an incremental improvement[J/OL]. [2022-03-17]. |
| 16 | Bochkovskiy A, Wang C Y, Liao H. YOLOv4: optimal speed and accuracy of object detection[J/OL]. [2022-03-17]. |
| 17 | Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector[C]∥European Conference on Computer Vision. Berlin: Springer, 2016: 21-37. |
| 18 | 谭红臣, 李淑华, 刘彬, 等. 特征增强的SSD算法及其在目标检测中的应用[J]. 计算机辅助设计与图形学学报, 2019, 31(4): 573-579. |
| Tan Hong-chen, Li Shu-hua, Liu Bin, et al. Feature enhanced SSD algorithm and its application in object detection[J]. Journal of Computer Aided Design and Graphics, 2019, 31(4): 573-579. | |
| 19 | Huang J, Rathod V, Sun C, et al. Speed/accuracy trade-offs for modern convolutional object detectors[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, USA, 2017: 7310-7311. |
| 20 | Concise feature pyramid region proposal network formulti-scale object detection[J]. Journal of Supercomp-uting, 2020, 76(5): 3327-3337. |
| 21 | Lin T Y, Dollar P, Girshick R, et al. Feature pyramid networks for object detection[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, USA, 2017: 936-944. |
| 22 | Wang C Y, Liao H, Wu Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]∥Proceedings of IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPR), Seattle, USA, 2020: 1571-1580. |
| 23 | Li Z, Wang H, Zhong H, et al. Self-attention moduleand FPN-based remote sensing image target detection[J]. Arabian Journal of Geosciences, 2021, 14(23): 1-18. |
| 24 | Prasetyo E, Suciati N, Fatichah C. Yolov4-tiny and spatial pyramid pooling for detecting head and tail of fish[C]∥2021 International Conference on Artificial Intelligence and Computer Science Technology (ICAICST), Yogyakarta, Indonesia, 2021: 157-161. |
| 25 | Shum H Y, Szeliski R, Systems and experiment paper : construction of panoramic image mosaics with global and local alignment[J]. International Journal of Computer Vision, 2000, 36(2): 101-130. |
| 26 | Zheng Z, Wang P, Liu W, et al. Distance-IoU loss: faster and better learning for bounding box regression[J]. AAAI Technical Track: Vision, 2019, 34(7): 12993-13000. |
| 27 | Li G, Liu Z, Li F, et al. Block Convolution: towards memory-efficient inference of large-scale CNNs on FPGA[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2021, 41(5): 1436-1447. |
| 28 | Zhang L, Wang S, Sun H, et al. Research on dual mode target detection algorithm for embedded platform[J]. Complexity, 2021, 2021(8): 1-8. |
| 29 | Liu C, Su X Y, Wu J, et al. Method for detecting surface defects of runner blades of large hydraulic turbines based on improved real-time lightweight net-work[J]. Journal of Physics Conference Series, 2021, 1955(1): 714-724. |
| 30 | Shen C, Zhao X, Liu Z, et al. Joint vehicle detection and distance prediction via monocular depth estimation[J]. IET Intelligent Transport Systems, 2020, 14(7): 753-763. |
| 31 | Zhe T, Huang L, Wu Q, et al. Inter-vehicle distance estimation method based on monocular vision using 3D detection[J]. IEEE Transactions on Vehicular Technology, 2020, 69(5): 4907-4919. |
| [1] | 何杰,张长健,严欣彤,王琛玮,叶云涛. 基于微观动力学参数的高速公路特征路段事故风险分析[J]. 吉林大学学报(工学版), 2024, 54(1): 162-172. |
| [2] | 王春华,李恩泽,肖敏. 多特征融合和孪生注意力网络的高分辨率遥感图像目标检测[J]. 吉林大学学报(工学版), 2024, 54(1): 240-250. |
| [3] | 薛珊,张亚亮,吕琼莹,曹国华. 复杂背景下的反无人机系统目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 891-901. |
| [4] | 陶博,颜伏伍,尹智帅,武冬梅. 基于高精度地图增强的三维目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 802-809. |
| [5] | 贺宜,孙昌鑫,彭建华,吴超仲,江亮,马明. 电动载货三轮车风险行为及影响因素分析[J]. 吉林大学学报(工学版), 2023, 53(2): 413-420. |
| [6] | 潘恒彦,张文会,梁婷婷,彭志鹏,高维,王永岗. 基于MIMIC与机器学习的出租车驾驶员交通事故诱因分析[J]. 吉林大学学报(工学版), 2023, 53(2): 457-467. |
| [7] | 朱洁玉,马艳丽. 合流区域多车交互风险实时评估方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1574-1581. |
| [8] | 高明华,杨璨. 基于改进卷积神经网络的交通目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1353-1361. |
| [9] | 彭涛,方锐,刘兴亮,王海玮,庞彦伟,许洪国,刘福聚,王涛. 基于典型事故场景的雪天高速换道自动驾驶策略[J]. 吉林大学学报(工学版), 2022, 52(11): 2558-2567. |
| [10] | 曲优,李文辉. 基于锚框变换的单阶段旋转目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(1): 162-173. |
| [11] | 潘德伦,冀隽,张跃进. 基于运动矢量空间编码的视频监控动态目标检测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1370-1374. |
| [12] | 陈雪云,许韬,黄小巧. 基于条件生成对抗网络的医学细胞图像生成检测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1414-1419. |
| [13] | 金立生,郭柏苍,王芳荣,石健. 基于改进YOLOv3的车辆前方动态多目标检测算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1427-1436. |
| [14] | 兰凤崇,李继文,陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1437-1446. |
| [15] | 袁哲明,袁鸿杰,言雨璇,李钎,刘双清,谭泗桥. 基于深度学习的轻量化田间昆虫识别及分类模型[J]. 吉林大学学报(工学版), 2021, 51(3): 1131-1139. |
|
||