吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 727-740.doi: 10.13229/j.cnki.jdxbgxb.20220553
• 交通运输工程·土木工程 • 上一篇
自动驾驶卡车路测安全员接管干预行为解析
涂辉招1( ),王万锦1,乔鹏2,郭静秋1(),鹿畅1,吴海飞3
),王万锦1,乔鹏2,郭静秋1(),鹿畅1,吴海飞3
- 1.同济大学 道路与交通工程教育部重点实验室,上海 201804
2.上海临港科技创新城经济发展有限公司,上海 201306
3.上研智联智能出行科技(上海)有限公司,上海 201306
Analysis of drivers′ intervention behavior in autonomous truck road testing
Hui-zhao TU1(),Wan-jin WANG1,Peng QIAO2,Jing-qiu GUO1(),Chang LU1,Hai-fei WU3
- 1.Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China
2.Shanghai Lingang Science and Technology Innovation City Economic Development Co. ,Ltd. ,Shanghai 201306,China
3.SICVIC (Shanghai) Co. ,Ltd. ,Shanghai 201306,China
摘要:
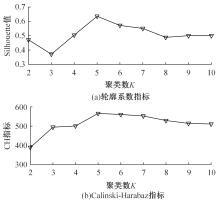
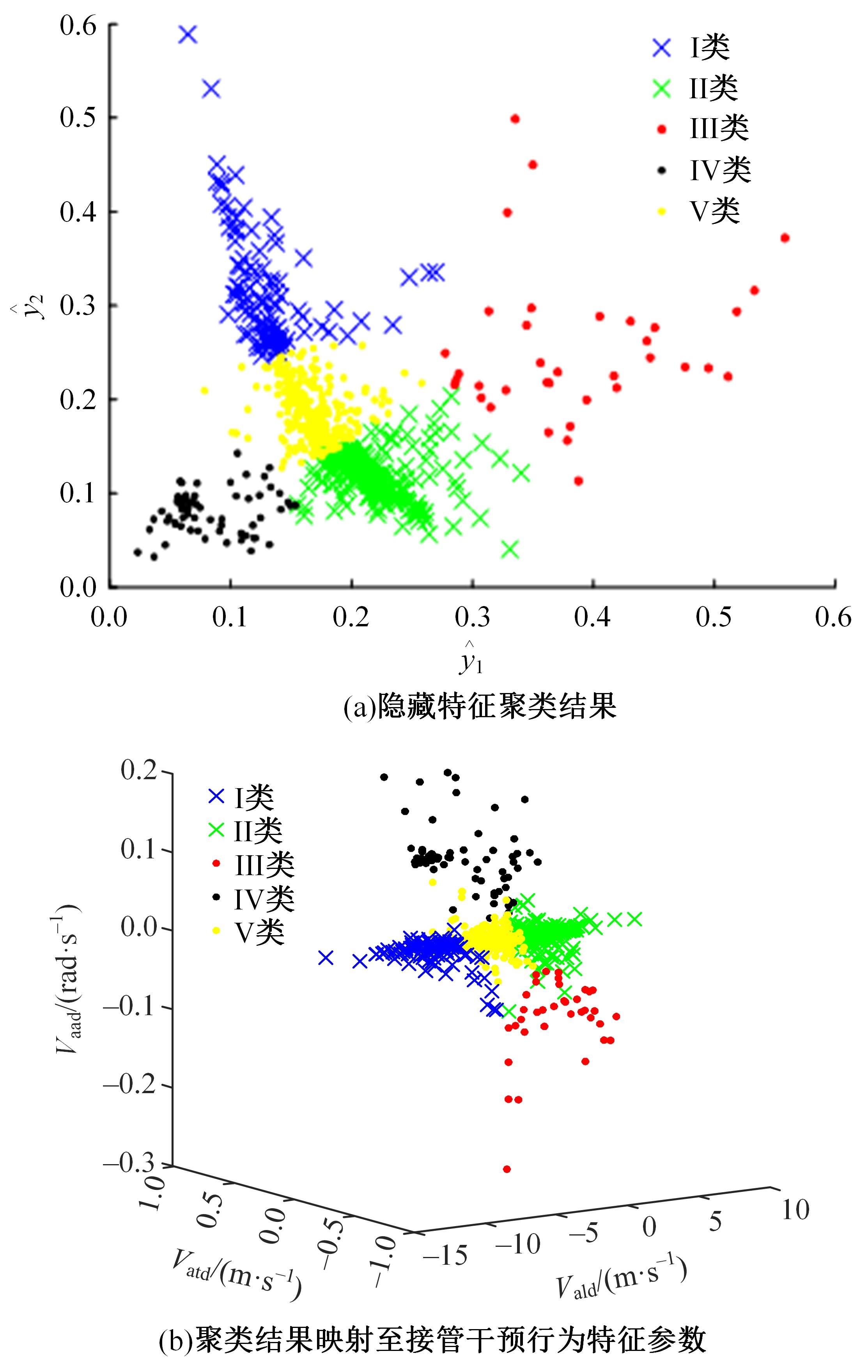
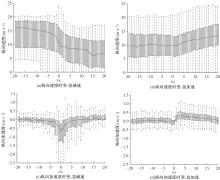
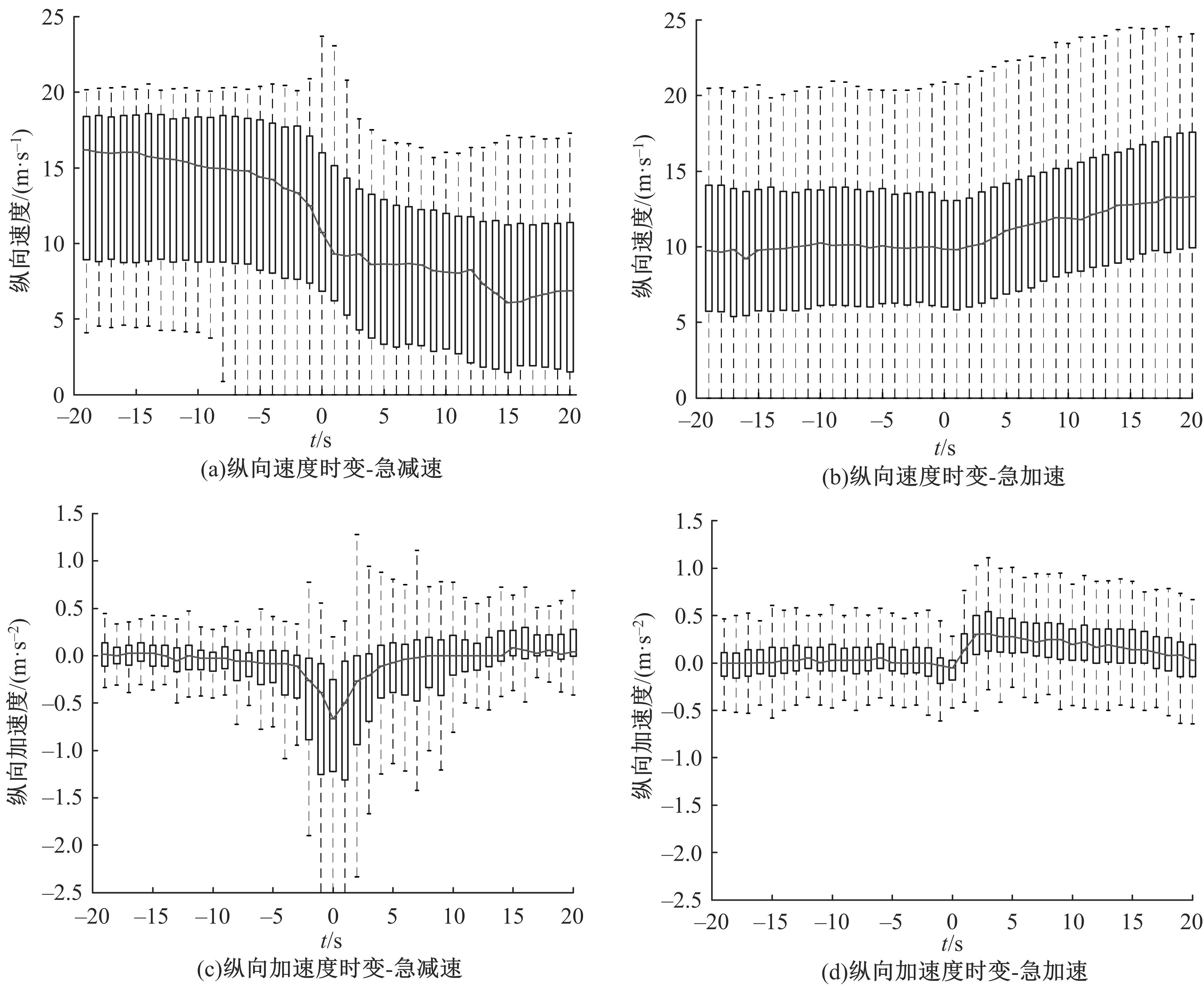
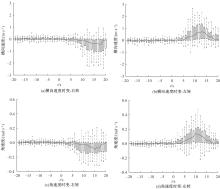
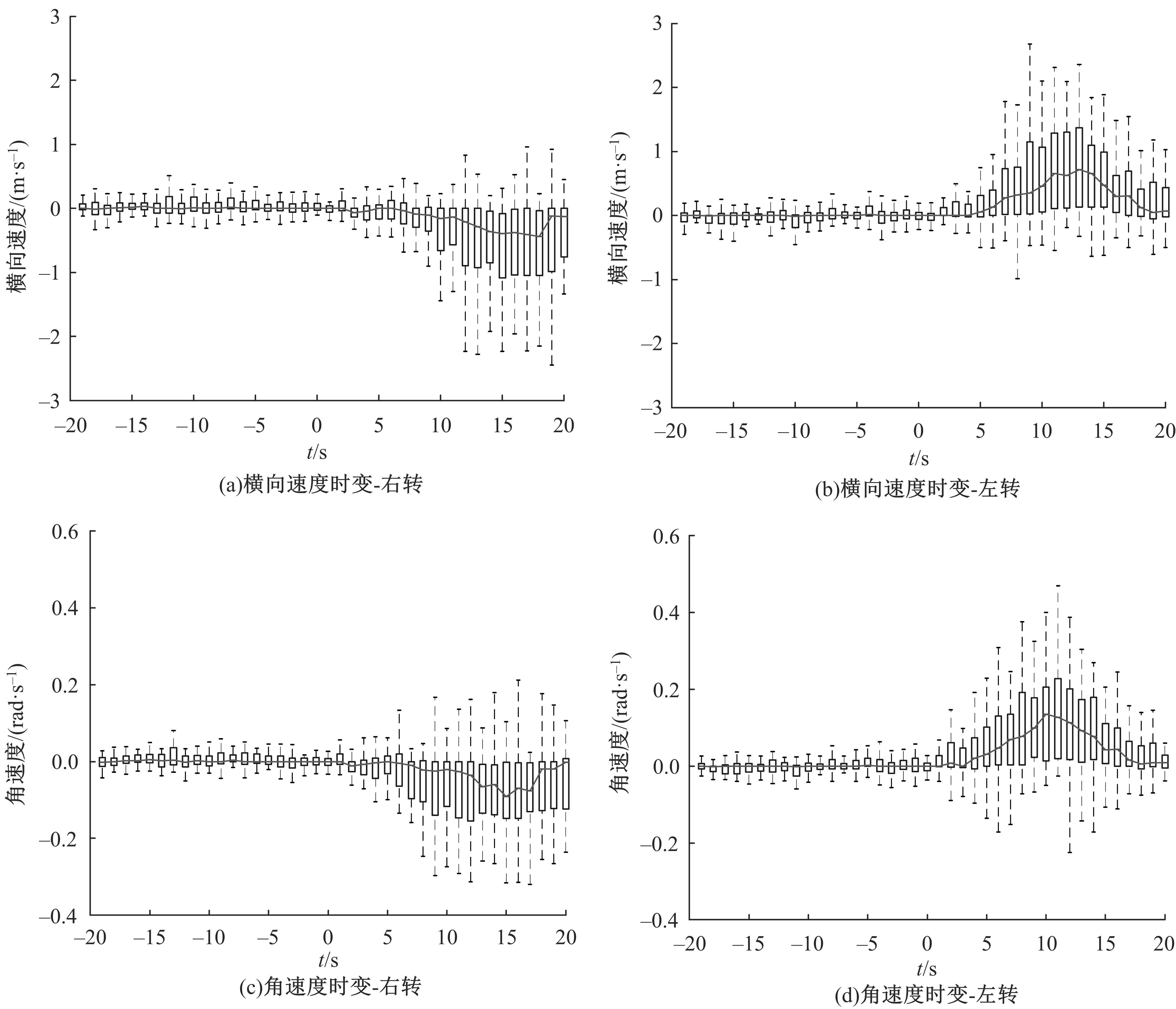
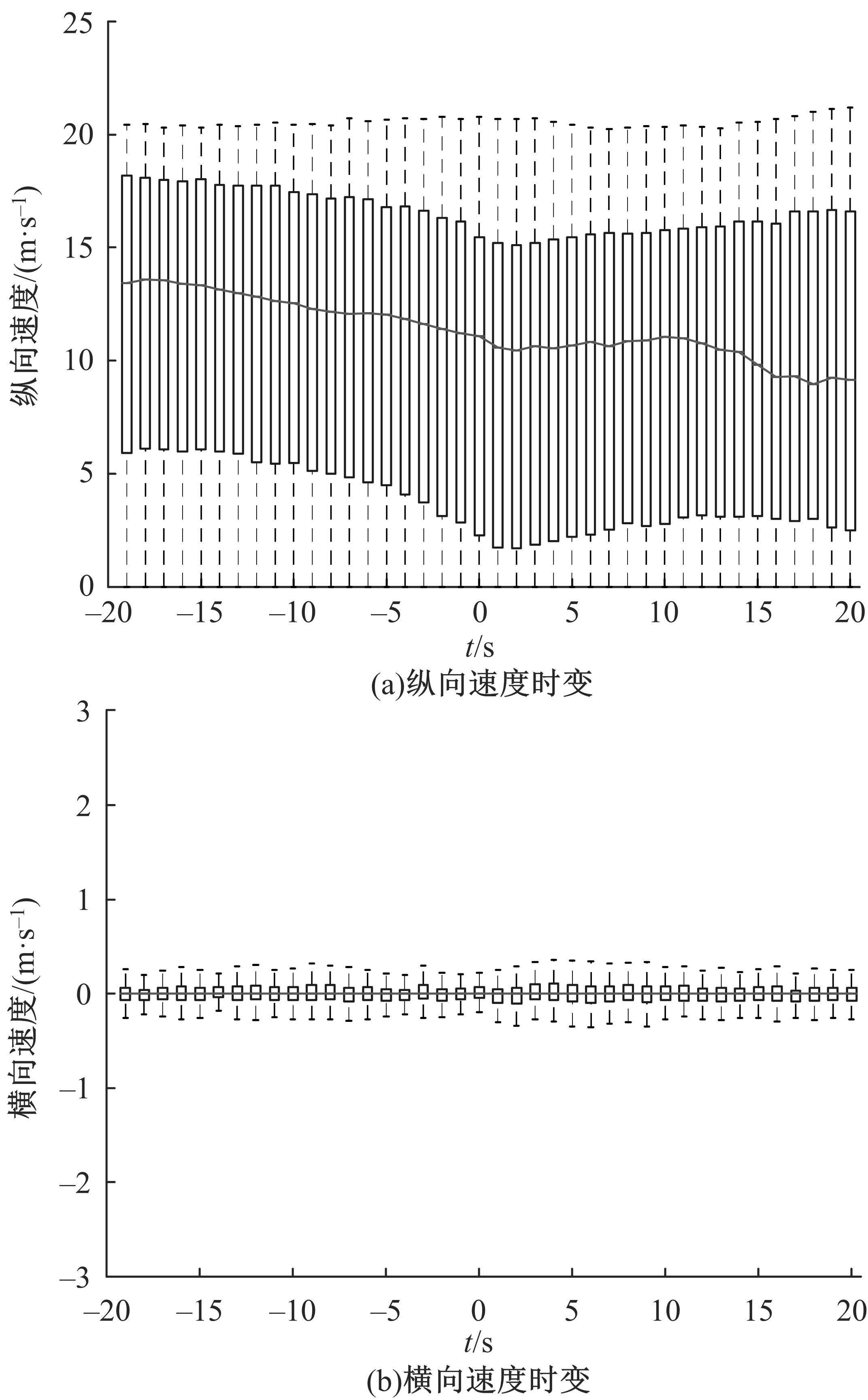
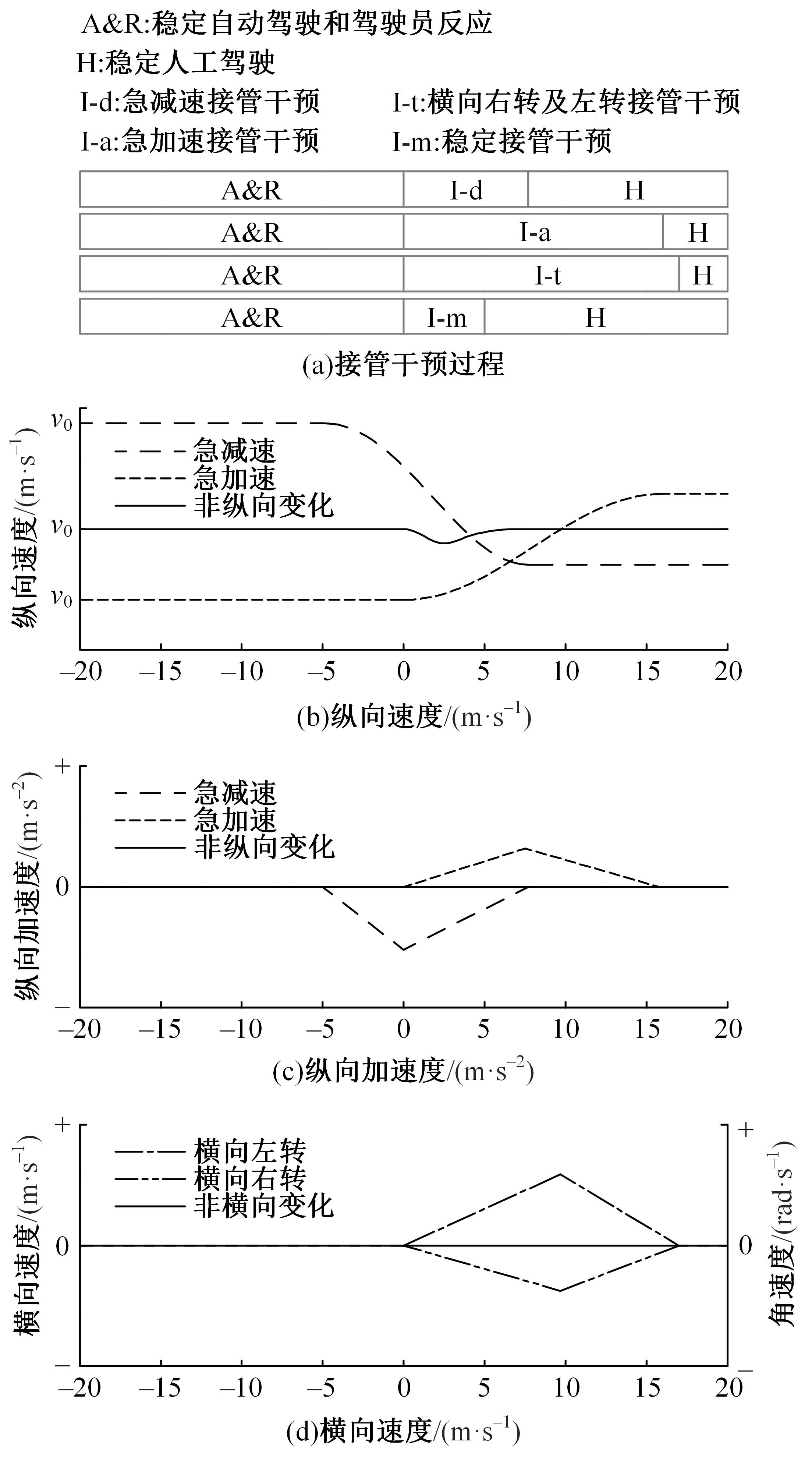
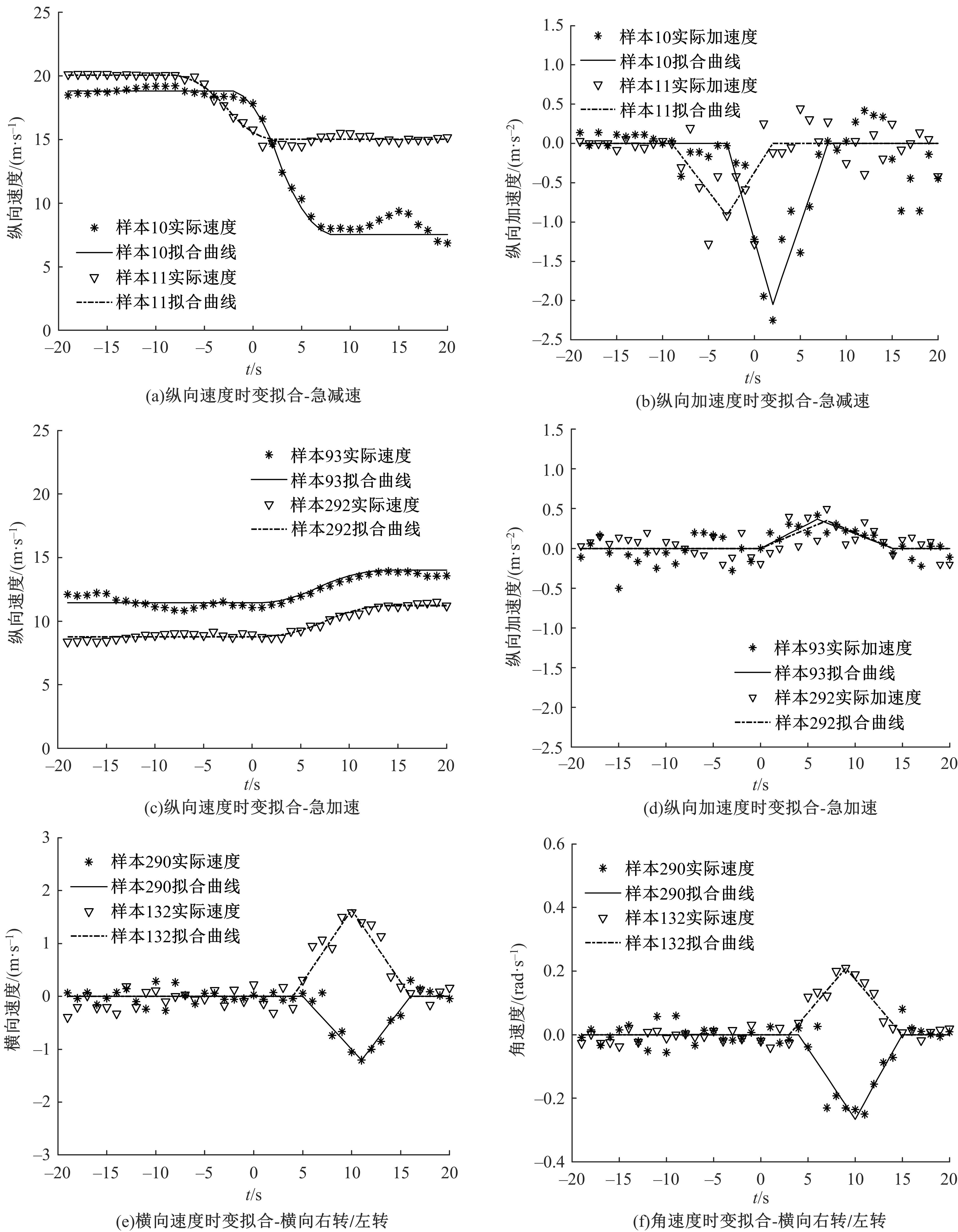
为解析和量化评估自动驾驶卡车路测安全员接管干预行为的有效性和安全性,以卡车速度、加速度及角速度等运行指标构造特征参数,联合自动编码机(AE)与K-means++算法构建复合模型,辨识出急减速、急加速、横向右转、横向左转和稳定接管等5种干预运行模式;综合人-车-路-环境多重因素,将接管干预原因分为避险接管、信任接管及优化接管3个类型;针对不同运行模式,结合时变特征分析其接管控制时间并辨析接管原因。基于自动驾驶卡车路测数据,提取了778个接管干预样本,评估验证方法的合理性和有效性。结果表明,受场景风险程度等要素影响,路测阶段急减速和稳定接管干预运行模式的接管控制时间明显少于其他接管干预运行模式;避险接管主要为急减/加速接管干预运行模式,信任接管多表现为横向右转/左转及稳定接管干预运行模式,优化接管仅有急加速接管干预运行模式;避险及信任接管类型占比大于80%,表明安全员在自动驾驶卡车路测中仍以确保路测安全为首要目标。
中图分类号:
- U491






| 1 | Sinha A, Chand S, Vu V, et al. Crash and disengagement data of autonomous vehicles on public roads in California[J]. Scientific Data, 2021, 8(1): 1-10. |
| 2 | 中关村智通智能交通产业联盟, 北京智能车联产业创新中心. 北京市自动驾驶车辆道路测试报告(2021年)[R]. 北京: 北京市自动驾驶测试管理联席工作小组, 2022. |
| China Mobility Alliance, Beijing Innovation Center for Mobility Intelligent. Beijing autonomous driving vehicle road test report(2021)[R]. Beijing: Beijing Autonomous Driving Test Management Joint Working Group, 2022. | |
| 3 | 上海市交通委员会. 上海市智能网联汽车发展报告(2021年)[R]. 上海: 上海市交通委员会, 2022. |
| Shanghai Municipal Transportation Commission. Shanghai intelligent connected vehicle development report(2021)[R]. Shanghai: Shanghai Municipal Transportation Commission, 2022. | |
| 4 | 陆键, 王可, 蒋愚明. 基于车辆行驶轨迹的道路不良驾驶行为实时辨识方法[J]. 交通运输工程学报, 2020, 20(6): 227-235. |
| Lu Jian, Wang Ke, Jiang Yu-ming. Real-time identification method of abnormal road driving behavior based on vehicle driving trajectory[J]. Journal of Traffic and Transportation Engineering,2020, 20(6): 227-235. | |
| 5 | 张姝玮, 郭忠印, 杨轸, 等. 驾驶行为多重分形特征在驾驶疲劳检测中的应用[J]. 吉林大学学报: 工学版, 2021, 51(2): 557-564. |
| Zhang Shu-wei, Guo Zhong-yin, Yang Zhen, et al. Application of multi⁃fractal features of driving performance in driver fatigue detection[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 557-564. | |
| 6 | 姚荣涵, 徐文韬, 郭伟伟. 基于因子长短期记忆的驾驶人接管行为及意图识别[J]. 吉林大学学报: 工学版, 2023, 53(3): 758-771. |
| Yao Rong-han, Xu Wen-tao, Guo Wei-wei. Drivers' takeover behavior and intention recognition based on factor and long short-term memory[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 758-771. | |
| 7 | Zeeb K, Buchner A, Schrauf M. Is take-over time all that matters? The impact of visual-cognitive load on driver take-over quality after conditionally automated driving[J]. Accident Analysis & Prevention, 2016, 92(7): 230-239. |
| 8 | Rangesh A, Deo N, Greer R, et al. Autonomous vehicles that alert humans to take-over controls: modeling with real-world data[C]∥2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 231-236. |
| 9 | Du N, Zhou F, Pulver E M, et al. Predicting driver takeover performance in conditionally automated driving[J]. Accident Analysis & Prevention, 2020, 148: No. 105748. |
| 10 | Guo S, Wu K, Zhang G. Application of PCA-K-means++ combination model to construction of light vehicle driving conditions in intelligent traffic[J]. Journal of Measurements in Engineering, 2020, 8(3): 107-121. |
| 11 | 林庆峰, 王兆杰, 鲁光泉. L3级自动驾驶汽车的接管安全性评价模型[J]. 汽车工程, 2019, 41(11): 1258-1264. |
| Lin Qing-feng, Wang Zhao-jie, Lu Guang-quan. Takeover safety evaluation model for level 3 automated vehicles[J]. Automotive Engineering, 2019, 41(11): 1258-1264. | |
| 12 | 鲁光泉, 陈发城, 李鹏辉, 等. 驾驶人跟车风险接受水平对其接管绩效的影响[J]. 汽车工程, 2021, 43(6): 808-814. |
| Lu Guang-quan, Chen Fa-cheng, Li Peng-hui, et al. Effect of drivers'acceptance level of car-following risk on the takeover performance[J]. Automotive Engineering, 2021, 43(6): 808-814. | |
| 13 | 涂辉招, 崔航, 鹿畅, 等. 面向自动驾驶路测驾驶能力评估的避险脱离率模型[J]. 同济大学学报: 自然科学版, 2020, 48(11): 1562-1569. |
| Tu Hui-zhao, Cui Hang, Lu Chang, et al. A risk-avoiding disengagement frequency model for assessing driving ability of autonomous vehicles in road testing[J]. Journal of Tongji University (Natural Science), 2020, 48(11): 1562-1569. | |
| 14 | Wan J, Wu C. The effects of lead time of take-over request and nondriving tasks on taking-over control of automated vehicles[J]. IEEE Transactions on Human-Machine Systems, 2018, 48(6): 582-591. |
| 15 | Lu Z, Happee R, Cabrall C D, et al. Human factors of transitions in automated driving: A general framework and literature survey[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 43: 183-198. |
| 16 | 姚荣涵, 祁文彦, 郭伟伟. 自动驾驶环境下驾驶人接管行为结构方程模型[J]. 交通运输工程学报, 2021, 21(2): 209-221. |
| Yao Rong-han, Qi Wen-yan, Guo Wei-wei. Structual equation modell of drivers' takeover behaviors in autonomous driving environment[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 209-221. | |
| 17 | Kim J, Kim W, Kim H S, et al. A novel study on subjective driver readiness in terms of non-driving related tasks and take-over performance[J]. ICT Express, 2022, 8(1): 91-96. |
| 18 | 郭烈, 胥林立, 秦增科, 等. 自动驾驶接管影响因素分析与研究进展[J]. 交通运输系统工程与信息, 2022, 22(2): 72-90. |
| Guo Lie, Xu Lin-li, Qin Zeng-ke, et al. Analysis and overview of influencing factors on autonomous driving takeover[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(2): 72-90. | |
| 19 | 钮建伟, 张雪梅, 孙一品, 等. 险情中驾驶人接管自动驾驶车辆的驾驶行为研究[J]. 中国公路学报, 2018, 31(6): 272-280. |
| Niu Jian-wei, Zhang Xue-mei, Sun Yi-pin, et al. Analysis of the driving behavior during the takeover of automatic driving vehicles in dangerous traffic situatios[J]. China Journal of Highway and Transport, 2018, 31(6): 272-280. | |
| 20 | Boggs A M, Arvin R, Khattak A J. Exploring the who, what, when, where, and why of automated vehicle disengagements[J]. Accident Analysis & Prevention, 2020, 136: No. 105406. |
| 21 | Favarò F, Eurich S, Nader N. Autonomous vehicles' disengagements: trends, triggers, and regulatory limitations[J]. Accident Analysis & Prevention, 2018, 110: 136-148. |
| 22 | Khattak Z H, Fontaine M D, Smith B L. Exploratory investigation of disengagements and crashes in autonomous vehicles under mixed traffic: an endogenous switching regime framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(12): 7485-7495. |
| 23 | de Waard D, van Der Hulst M, Hoedemaeker M, et al. Driver behavior in an emergency situation in the Automated Highway System[J]. Transportation Human Factors, 1999, 1(1): 67-82. |
| 24 | Strand N, Nilsson J, Karlsson I M, et al. Semi-automated versus highly automated driving in critical situations caused by automation failures[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2014, 27: 218-228. |
| 25 | 甘蜜, 卿三东, 刘晓波, 等. 货车轨迹数据在公路货运系统中应用研究综述[J]. 交通运输系统工程与信息, 2021, 21(5): 91-101. |
| Gan Mi, San-dong Qing, Liu Xiao-bo, et al. Review on application of truck trajectory data in highway freight system[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 91-101. | |
| 26 | Morgan P L, Alford C, Williams C, et al. Manual takeover and handover of a simulated fully autonomous vehicle within urban and extra-urban settings[C]∥International Conference on Applied Human Factors and Ergonomics, Los Angeles, USA, 2017: 760-771. |
| 27 | Walch M, Lange K, Baumann M, et al. Autonomous driving: investigating the feasibility of car-driver handover assistance[C]∥Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, United Kingdom, 2015: 11-18. |
| 28 | 彭博, 张媛媛, 王玉婷, 等. 基于自动编码机-分类器的视频交通状态自动识别[J]. 吉林大学学报: 工学版, 2021, 51(3): 886-892. |
| Peng Bo, Zhang Yuan-yuan, Wang Yu-ting, et al. Automatic traffic state recognition from videos based on auto⁃encoder and classifiers[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 886-892. | |
| 29 | 郭靖, 侯苏. K-means算法最佳聚类数评价指标研究[J]. 软件导刊, 2017, 16(11): 5-8. |
| Guo Jing, Hou Su. Study on index of determining the optimal clustering number of K-means algorithm[J]. Software Guide, 2017, 16(11): 5-8. | |
| 30 | 吴斌, 朱西产, 沈剑平. 基于自然驾驶数据的驾驶员紧急制动行为特征[J]. 同济大学学报: 自然科学版, 2018, 46(11): 1514-1519, 1535. |
| Wu Bin, Zhu Xi-chan, Shen Jian-ping. Driver emergency braking behavior based on naturalistic driving data[J]. Journal of Tongji University (Natural Science), 2018, 46(11): 1514-1519, 1535. | |
| 31 | Markkula G, Benderius O, Wolff K, et al. A review of near-collision driver behavior models[J]. Human Factors The Journal of the Human Factors and Ergonomics Society, 2012, 54(6): 1117-1143. |
| 32 | 王雪松, 杨敏明. 基于自然驾驶数据的变道切入行为分析[J]. 同济大学学报: 自然科学版, 2018, 46(8): 1057-1063. |
| Wang Xue-song, Yang Min-ming. Cut-in behavior analysis based on naturalistic driving data[J]. Journal of Tongji University (natural science), 2018, 46(8): 1057-1063. | |
| 33 | Lv C, Cao D, Zhao Y, et al. Analysis of autopilot disengagements occurring during autonomous vehicle testing[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 5(1): 58-68. |
| 34 | Liu Q, Wang X, Wu X, et al. Crash comparison of autonomous and conventional vehicles using pre-crash scenario typology[J]. Accident Analysis & Prevention, 2021, 159(4): No. 106281. |
| [1] | 曲大义,张可琨,顾原,王韬,宋慧,戴守晨. 自动驾驶车辆换道决策行为分析及分子动力学建模[J]. 吉林大学学报(工学版), 2024, 54(3): 700-710. |
| [2] | 马潇驰,陆建. 基于基因表达式编程的高架道路事故实时预测[J]. 吉林大学学报(工学版), 2024, 54(3): 719-726. |
| [3] | 严利鑫,冯进培,郭军华,龚毅轲. 不同险态情景下共驾型智能车辆接管行为特征分析[J]. 吉林大学学报(工学版), 2024, 54(3): 683-691. |
| [4] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [5] | 郑植,袁佩,金轩慧,魏思斯,耿波. 桥墩复合材料柔性防撞护舷试验[J]. 吉林大学学报(工学版), 2023, 53(9): 2581-2590. |
| [6] | 李洪涛,王琳虹,李俊达. 公路交叉口照明和限速对视觉搜索能力的影响[J]. 吉林大学学报(工学版), 2023, 53(8): 2287-2297. |
| [7] | 李建华,王泽鼎. 考虑路径耗时的城市汽车分布式充电桩选点规划[J]. 吉林大学学报(工学版), 2023, 53(8): 2298-2303. |
| [8] | 巫威眺,曾坤,周伟,李鹏,靳文舟. 基于多源数据和响应面优化的公交客流预测深度学习方法[J]. 吉林大学学报(工学版), 2023, 53(7): 2001-2015. |
| [9] | 何永明,陈世升,冯佳,万亚楠. 基于高精地图的超高速公路虚拟轨道系统[J]. 吉林大学学报(工学版), 2023, 53(7): 2016-2028. |
| [10] | 程国柱,盛林,赵浩,冯天军. 基于危险度分析的信号交叉口专用相位设置条件[J]. 吉林大学学报(工学版), 2023, 53(7): 1962-1969. |
| [11] | 薛志佳,王召阳,张久鹏,晏长根,许子凯,张英立,黄晓明,马涛. 泥石流作用下道路结构韧性分析及提升[J]. 吉林大学学报(工学版), 2023, 53(6): 1773-1781. |
| [12] | 刘振亮,赵存宝,吴云鹏,马迷娜,马龙双. 数据驱动的公路桥梁网络全寿命抗震韧性评估[J]. 吉林大学学报(工学版), 2023, 53(6): 1695-1701. |
| [13] | 贾洪飞,徐英俊,杨丽丽,王楠. 商品车多式联运联盟成员选择及利益分配[J]. 吉林大学学报(工学版), 2023, 53(4): 1060-1069. |
| [14] | 孙超,尹浩为,汤文蕴,褚昭明. 交通需求估计下的检测器布局和手机数据扩样推断[J]. 吉林大学学报(工学版), 2023, 53(4): 1070-1077. |
| [15] | 常玉林,徐文倩,孙超,张鹏. 车联网环境下考虑遵从程度的混合流量逐日均衡[J]. 吉林大学学报(工学版), 2023, 53(4): 1085-1093. |
|
||