吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (7): 1574-1581.doi: 10.13229/j.cnki.jdxbgxb20210148
• 交通运输工程·土木工程 • 上一篇
合流区域多车交互风险实时评估方法
朱洁玉( ),马艳丽()
),马艳丽()
- 哈尔滨工业大学 交通科学与工程学院,哈尔滨 150090
Real-time risk assessment method of multi-vehicle interaction at merging area
Jie-yu ZHU(),Yan-li MA()
- School of Transportation Science and Engineering,Harbin Institute of Technology,Harbin 150090,China
摘要:
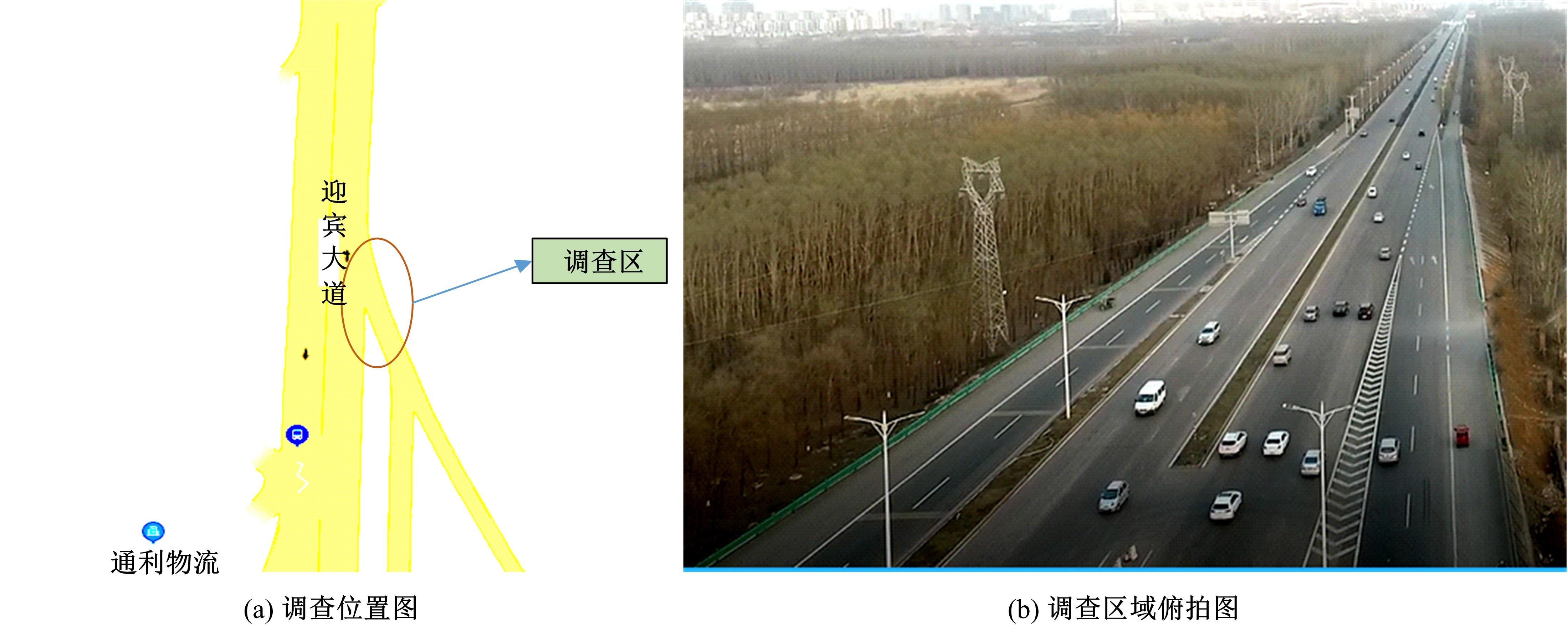
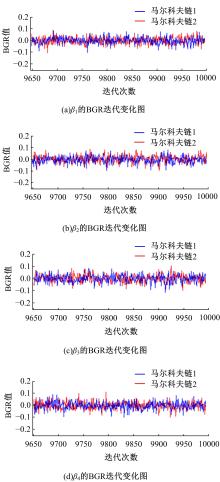
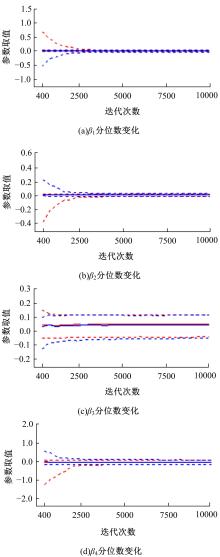
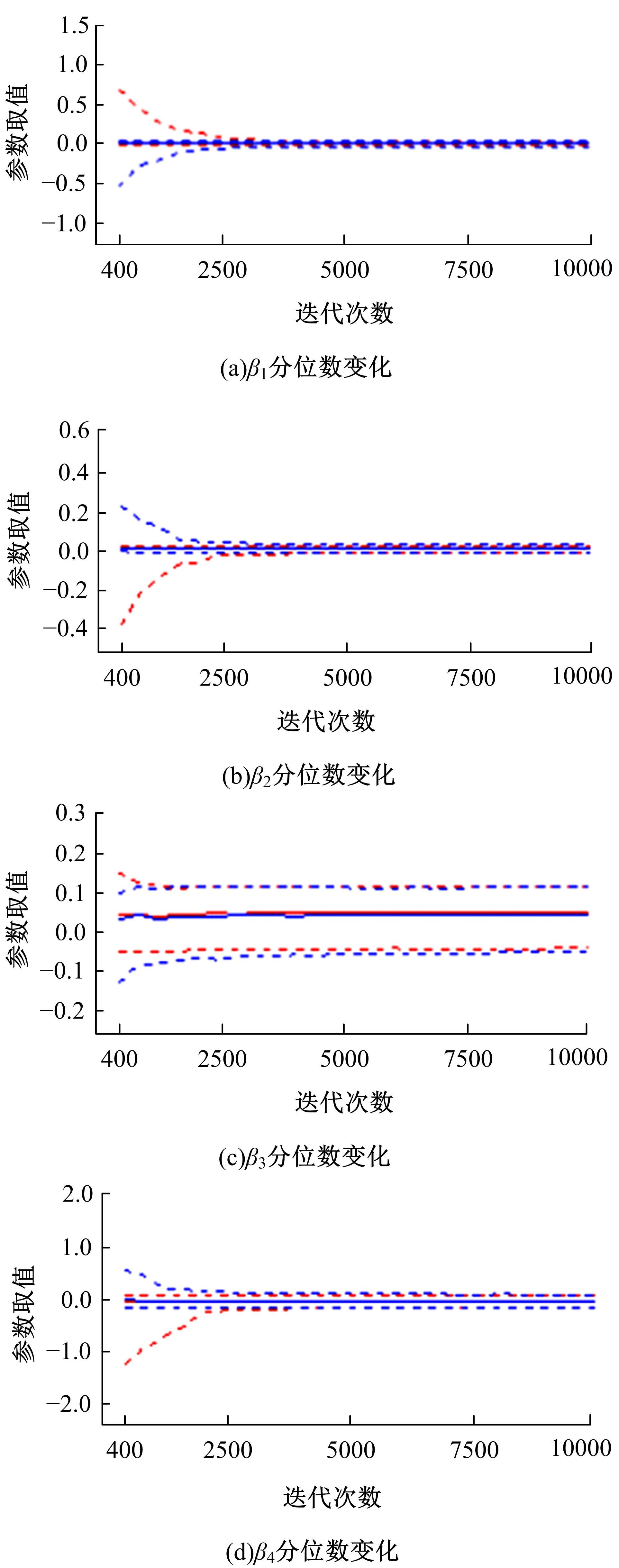
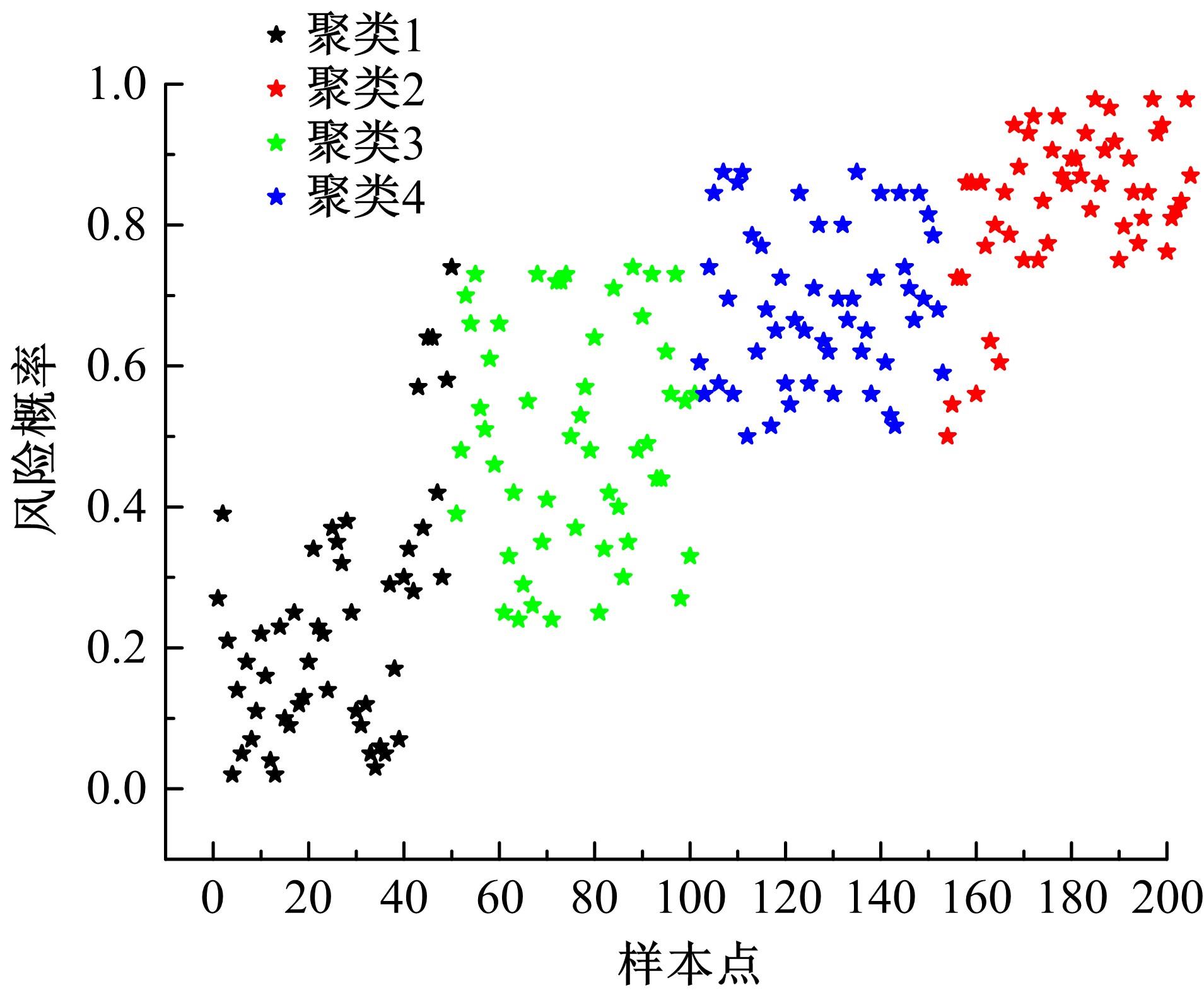
为探究合流区多车交互换道条件下的交通安全状况,开展了合流区多车交互风险实时评估研究。考虑车辆动力学以及多车交互作用特性,构建了基于车辆物理状态层、多车交互层和风险概率层的贝叶斯分层风险实时评估模型。利用MCMC吉布斯取样法标定模型参数,采用后验预测
中图分类号:
- U492.8



| 1 | Ahammed M A, Hassan Y, Sayed T A. Modeling driver behavior and safety on freeway merging areas[J]. Journal of Transportation Engineering, 2008, 134(9):370-377. |
| 2 | Lee C, Abdel-Aty M. Analysis of crashes on freeway ramps by location of crash and presence of advisory speed signs[J]. Journal of Transportation Safety & Security, 2009, 1(2):121-134. |
| 3 | Mergia W Y, Eustace D, Chimba D, et al. Exploring factors contributing to injury severity at freeway merging and diverging locations in Ohio[J]. Accident Analysis and Prevention, 2013, 55(6):202-210. |
| 4 | Cafiso S, Graziano A D, Silvestro G D, et al. Development of comprehensive accident models for two-lane rural highways using exposure, geometry, consistency and context variables[J]. Accident Analysis & Prevention, 2010, 42(4):1072-1079. |
| 5 | Geedipally S R, Lord D, Dhavala S S. The negative binomial-Lindley generalized linear model: Characteristics and application using crash data[J]. Accident Analysis and Prevention, 2012, 45:258-265. |
| 6 | Eustace D, Aylo A, Mergia W Y. Crash frequency analysis of left-side merging and diverging areas on urban freeway segments——a case study of I-75 through downtown Dayton, Ohio[J]. Transportation Research Part C, 2015, 50(1):78-85. |
| 7 | 王雪松, 宋洋, 黄合来, 等. 基于分层负二项模型的城郊公路安全影响因素研究[J].中国公路学报, 2014, 27(1):100-106. |
| Wang Xue-song, Song Yang, Huang He-lai, et al. Research on influencing factors of Suburban Highway safety based on hierarchical negative binomial model[J]. Chinese Journal of Highways, 2014, 27(1):100-106. | |
| 8 | 马聪, 张生瑞, 马壮林, 等. 高速公路交通事故非线性负二项预测模型[J].中国公路学报, 2018, 31(11):176-185. |
| Ma Cong, Zhang Sheng-rui, Ma Zhuang-lin, et al. Nonlinear negative binomial forecasting model for expressway traffic accidents[J]. Chinese Journal of Highways, 2018, 31(11):176-185. | |
| 9 | 郭璘, 周继彪, 董升, 等. 基于改进K-means算法的城市道路交通事故分析[J].中国公路学报,2012,31(4):270-279. |
| Guo Lin, Zhou Ji-biao, Dong Sheng, et al. Analysis of urban road traffic accidents based on improved K-means algorithm [J]. Chinese Journal of Highways, 2012,31(4):270-279. | |
| 10 | Abdel A M, Pande A. Identifying crash propensity using specific traffic speed conditions[J]. Journal of Safety Research, 2005, 36(1):97-108. |
| 11 | 马艳丽,范璐洋,吕天玲,等.车辆运行风险贝叶斯网络量化分级方法[J].哈尔滨工业大学学报, 2020,52(3):33-37. |
| Ma Yan-li, Fan Lu-yang, Lv Tian-ling, et al. Bayesian network quantitative classification method of vehicle operation risk[J]. Journal of Harbin Institute of Technology, 2020,52(3):33-37. | |
| 12 | Xiong X, Chen L, Liang J, et al. Vehicle driving risk prediction based on markov chain model[J]. Discrete Dynamics in Nature and Society, 2018: 1-12. |
| 13 | Mohamed, M, Ahmed H. Application of stochastic gradient boosting technique to enhance reliability of real-time risk assessment: use of automatic vehicle identification and remote traffic microwave sensor data[J]. Transportation Research Record, 2018, 2386(1):26-34. |
| 14 | Ma Y, Qi S, Fan L, et al. Dynamic bayesian network approach to evaluate vehicle driving risk based on on-road experiment driving data[J]. IEEE Access, 2019, 99: 135050-135062. |
| 15 | Sun Jie, Sun Jian. A dynamic Bayesian network model for real-time crash prediction using traffic speed conditions data[J]. Transportation Research, Part C: Emerging Technologies, 2015, 54(5):176-186. |
| 16 | Abdel A M, Pande A, Lee C, et al. Crash risk assessment using intelligent transportation systems data and real-time intervention strategies to improve safety on freeways[J]. Journal of Intelligent Transportation Systems, 2007, 11(3):107-120. |
| 17 | Yang K, Wang X, Yu R, et al. A Bayesian dynamic updating approach for urban expressway real-time crash risk evaluation[J]. Transportation Research Part C: Emerging Technologies, 2018, 96:192-207. |
| 18 | John K. Doing Bayesian Data Analysis: A Tutorial with R and BUGS[M]. Beijing: China Machine Press, 1900. |
| 19 | 刘金山, 夏强. 基于MCMC算法的贝叶斯统计方法[M]. 北京:科学出版社, 2015. |
| [1] | 程国柱,程瑞,徐亮,张文会. 基于乘员伤害分析的公路路侧事故风险评价[J]. 吉林大学学报(工学版), 2021, 51(3): 875-885. |
| [2] | 王露,刘玉雯,陈红. 侧风下峡谷桥隧连接段汽车的行驶特性[J]. 吉林大学学报(工学版), 2019, 49(3): 736-748. |
| [3] | 代存杰,李引珍,马昌喜,柴获,牟海波. 不确定条件下危险品配送路线多准则优化[J]. 吉林大学学报(工学版), 2018, 48(6): 1694-1702. |
| [4] | 王芳荣, 郭柏苍, 金立生, 高琳琳, 岳欣羽. 次任务驾驶安全评价指标筛选及其权值计算[J]. 吉林大学学报(工学版), 2017, 47(6): 1710-1715. |
| [5] | 谭立东, 刘丹, 李文军. 基于蝇复眼的交通事故现场全景图像阵列仿生设计[J]. 吉林大学学报(工学版), 2017, 47(6): 1738-1744. |
| [6] | 李显生, 孟祥雨, 郑雪莲, 程竹青, 任圆圆. 非满载罐体内液体冲击动力学特性[J]. 吉林大学学报(工学版), 2017, 47(3): 737-743. |
| [7] | 王占中, 赵利英, 曹宁博. 基于多层编码遗传算法的危险品运输调度模型[J]. 吉林大学学报(工学版), 2017, 47(3): 751-755. |
| [8] | 徐进, 陈薇, 周佳, 罗骁, 邵毅明. 汽车转向盘操作与驾驶负荷的相关性[J]. 吉林大学学报(工学版), 2017, 47(2): 438-445. |
| [9] | 郭应时, 付锐, 赵凯, 马勇, 袁伟. 驾驶人换道意图实时识别模型评价及测试[J]. 吉林大学学报(工学版), 2016, 46(6): 1836-1844. |
| [10] | 孙璐, 徐建, 崔相民. 面板数据模型分析及交通事故预测[J]. 吉林大学学报(工学版), 2015, 45(6): 1771-1778. |
| [11] | 王喆, 杨柏婷, 刘昕, 刘群, 宋现敏. 基于模糊聚类的驾驶决策判别[J]. 吉林大学学报(工学版), 2015, 45(5): 1414-1419. |
| [12] | 马勇, 石涌泉, 付锐, 郭应时. 驾驶人分心时长对车道偏离影响的实车试验[J]. 吉林大学学报(工学版), 2015, 45(4): 1095-1101. |
| [13] | 徐建, 孙璐. 解决交通事故数据分析中零值问题的模型[J]. 吉林大学学报(工学版), 2015, 45(3): 769-775. |
| [14] | 金立生, 王岩, 刘景华, 王亚丽, 郑义. 基于Adaboost算法的日间前方车辆检测[J]. 吉林大学学报(工学版), 2014, 44(6): 1604-1608. |
| [15] | 金立生,牛清宁,刘景华,秦彦光,吕欢欢. 不同道路线形下驾驶人认知分散状态监测[J]. 吉林大学学报(工学版), 2014, 44(3): 642-647. |
|
||