吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (9): 2511-2519.doi: 10.13229/j.cnki.jdxbgxb.20221425
• 交通运输工程·土木工程 • 上一篇
面向智能汽车-行人交互的虚拟测试场景构建
郭洪艳1,2( ),张家铭1,2,刘俊1,3(),胡云峰1,2
),张家铭1,2,刘俊1,3(),胡云峰1,2
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
3.吉林大学 汽车工程学院,长春 130022
Construction of virtual test scenario for intelligent vehicle and pedestrian interaction
Hong-yan GUO1,2(),Jia-ming ZHANG1,2,Jun LIU1,3(),Yun-feng HU1,2
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
3.College of Automotive Engineering,Jilin University,Changchun 130022,China
摘要:
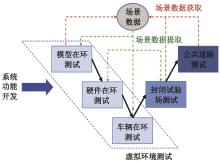
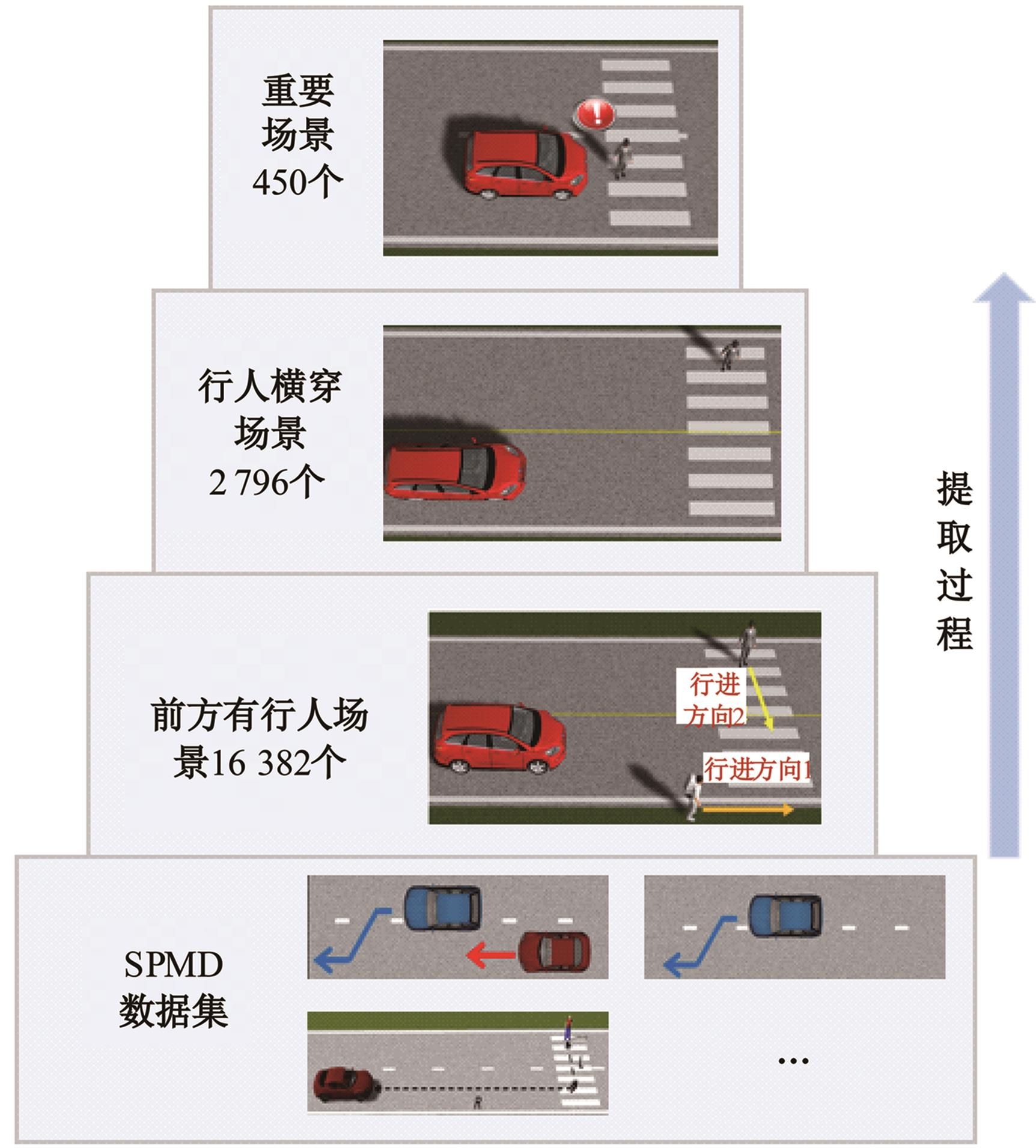
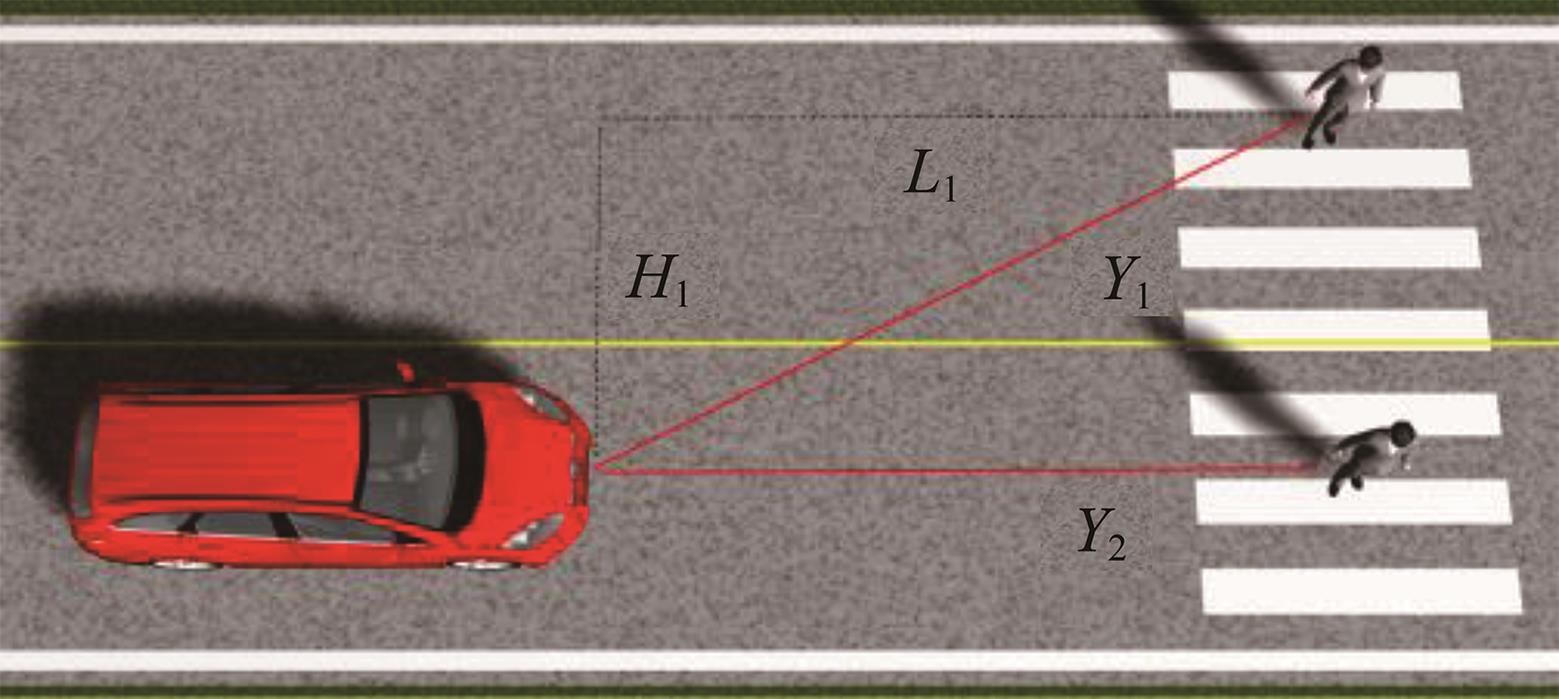
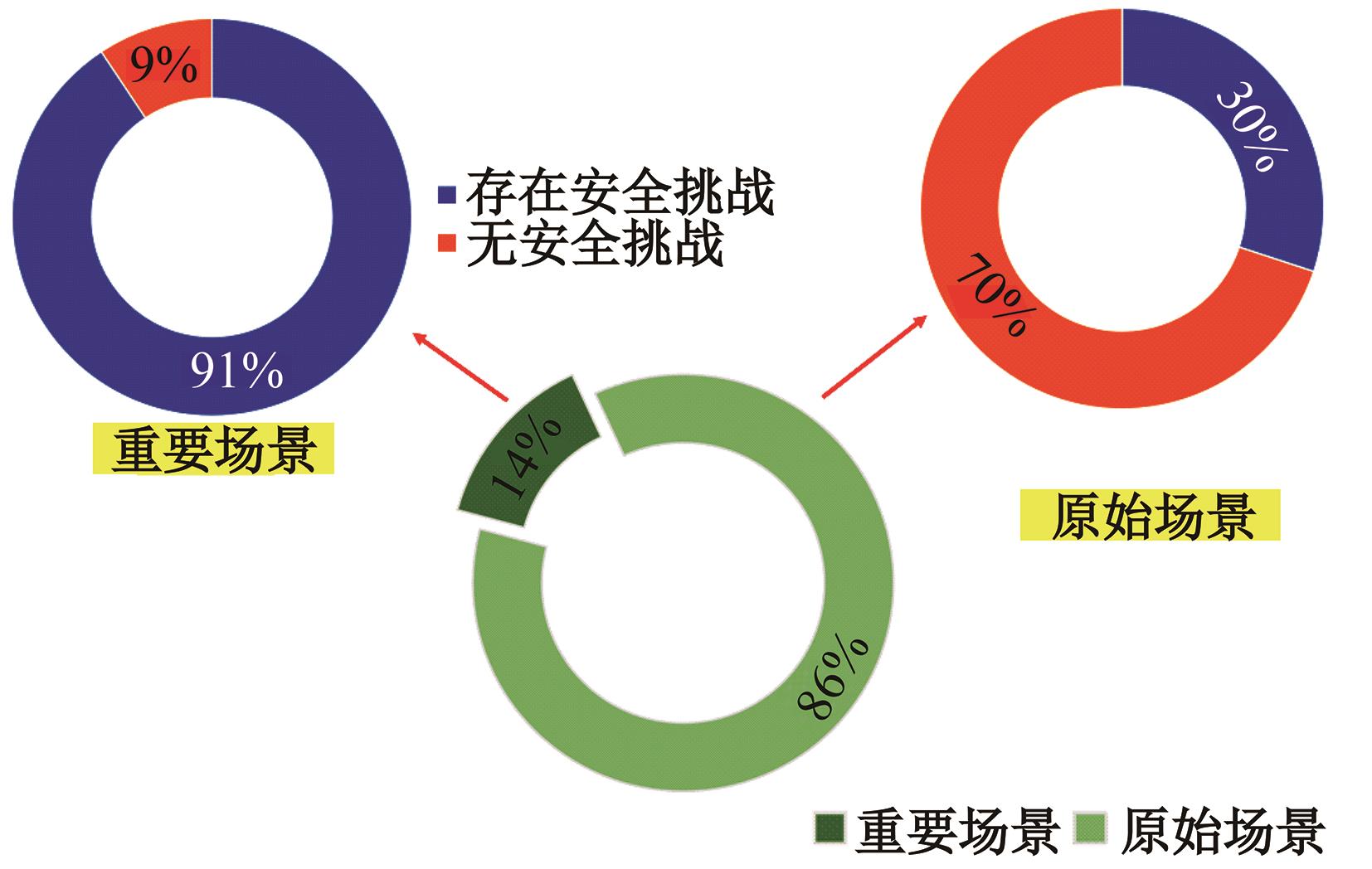
针对城市工况下的智能汽车与行人交互测试需求,提出了一种综合考虑场景在真实世界中的出现频率及其对人车交互性能挑战程度的场景生成方法。首先,依据智能汽车与行人交互的关键特征从自然驾驶数据集中提取出行人横穿道路原始场景数据;然后,针对加速测试需求设计了基于重要性采样理论的关键场景提取方法,从原始场景中提取并构建针对智能汽车-行人交互测试的重要场景;最后,通过对重要场景与原始场景的数据分布比较,证明本文方法能够有效筛选出驾驶过程中可能对安全性能带来挑战的场景,从而实现加速测试,同时兼顾测试场景的统计特征。
中图分类号:
- TP13




















| 1 | Ridel D, Rehder E, Lauer M, et al. A literature review on the prediction of pedestrian behavior in urban scenarios[C]∥Proceeding of 2018 21st International Conference on Intelligent Transportation Systems(ITSC), Maui, USA, 2018: 3105-3112. |
| 2 | Yuan Q, Hu M, Li Y. Scenario design and driving simulation experiment of vehicle-to-pedestrain accidents based on real accident data[J]. J Automotive Safety and Energy, 2012,3(1): 19-25. |
| 3 | Daniel J, Kara K. Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations[J]. Transportation Research Part A: Policy and Practice, 2015(77): 167-181. |
| 4 | J3016.Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles [S]. |
| 5 | Rasouli A, Tsotsos J. Autonomous vehicles that interact with pedestrians: a survey of theory and practice[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 900-918. |
| 6 | Ray L, Joshué P, Martin D. A complete framework for developing and testing automated driving controllers[J]. IFAC-Papers On Line, 2017,50(1): 258-263. |
| 7 | 刘颖,贺锦鹏,朱西产,等.自动紧急制动系统行人测试场景的研究[J].汽车技术,2014(3):35-39. |
| Liu Ying, He Jin Peng, Zhu Xi-chan, et al. Research on test scenarios for AEB pedestrian system[J]. Automobile Technology, 2014(3): 35-39. | |
| 8 | 马峻岩,田叶凡,赵祥模,等.基于自然驾驶数据挖掘的二阶车辆与行人交互测试场景[J].中国公路学报, 2022,35(3):139-152. |
| Ma Jun-yan, Tian Ye-fan, Zhao Xiang-mo, et al. Two-stages test scenarios for interaction of vehicles and pedestrians based on naturalistic driving data mining[J]. China Journal of Highway and Transport, 2022,35(3):139-152. | |
| 9 | V9.0.4. Vulnerable road user (VRU) protection [S]. |
| 10 | Swanson E, Yanagisawa M, Naim W, et al. Crash avoidance needs and countermeasure profiles for safety applications based on light-vehicle-to-pedestrian communications[R]. Washington DC: National Highway Traffic Safety Administration, 2016. |
| 11 | Lenard J, Welsh R, Danton R. Time-to-collision analysis of pedestrian and pedal-cycle accidents for the development of autonomous emergency braking systems[J]. Accident Analysis & Prevention,2018,115: 128-136. |
| 12 | 谭正平, 车瑶栎, 肖凌云, 等.面向自动驾驶的典型汽车与行人事故冲突场景研究[J].安全与环境学报,2021,21(4): 1573-1582. |
| Tan Zheng-ping, Che Yao-yue, Xiao Ling-yun, et al. Trace analysis for the typical precrash scenario between car vehicle and pedestrian caused by the automatic driving[J]. Journal of Safety and Environment, 2021, 21(4): 1573-1582. | |
| 13 | Huang X, Zhao D, Peng H. Empirical study of DSRC performance based on safety pilot model deployment data[J]. IEEE Transactions on Intelligent Transportation Systems, 2017,18(10): 2619-2628. |
| 14 | 中国汽车技术研究中心有限公司. 中国新车评价规程(C-NCAP)2018年版管理规则[EB/OL]. [2022-11-02]. |
| 15 | 郭晓东. 轿车前方行人识别及碰撞预警系统研究[D].沈阳:东北大学机械工程与自动化学院,2012. |
| Guo Xiao-dong. Study on pedestrian recognition ahead of vehicle and collision warning system[D]. Shenyang:School of Mechanical Engineering and Automation,Northeastern University, 2012. | |
| 16 | 李霖,朱西产,陈海林.驾驶员制动和转向避撞极限[J].同济大学学报: 自然科学版, 2016, 44(11): 1743-1748. |
| Li Lin, Zhu Xi-chan, Chen Hai-lin. Drivers´ collision avoidance limit by braking and steering[J]. Journal of Tongji University (Natural Science), 2016,44(11): 1743-1748. | |
| 17 | 蒋拯民,党少博,李慧云,等.自动驾驶汽车场景测试研究进展综述[J].汽车技术, 2022(8):10-22. |
| Jiang Zheng-min, Dang Shao-bo, Li Hui-yun, et al. A survey on the research progress of scenario-based testing for autonomous vehicles[J]. Automobile Technology, 2022(8): 10-22. |
| [1] | 鲜斌,王印鑫,王岭. 无人机集群分布式跟踪抗扰控制设计与实验验证[J]. 吉林大学学报(工学版), 2024, 54(7): 2093-2103. |
| [2] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [3] | 李寿涛,李嘉霖,孟庆瑜,郭洪艳. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2395-2403. |
| [4] | 于鹏,朴燕. 基于多尺度特征的行人重识别属性提取新方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1155-1162. |
| [5] | 马丹,裴玉龙,刘涛,刘锐. 城市路段行人不良过街行为决策模型及技术矫正措施[J]. 吉林大学学报(工学版), 2023, 53(1): 111-123. |
| [6] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [7] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [8] | 张玮,张树培,罗崇恩,张生,王国林. 智能汽车紧急工况避撞轨迹规划[J]. 吉林大学学报(工学版), 2022, 52(7): 1515-1523. |
| [9] | 陈雪云,贝学宇,姚渠,金鑫. 基于G⁃UNet的多场景行人精确分割与检测[J]. 吉林大学学报(工学版), 2022, 52(4): 925-933. |
| [10] | 邝先验,陈自如. 基于CA的无信号灯控制路段行人过街横道处动态博弈礼让行为[J]. 吉林大学学报(工学版), 2022, 52(4): 837-846. |
| [11] | 侯春萍,杨庆元,黄美艳,王致芃. 基于语义耦合和身份一致性的跨模态行人重识别方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2954-2963. |
| [12] | 张彦玲,王灿,张旭,王昂洋,李运生. 不同吊杆形式悬索桥人致振动分析及舒适度评价[J]. 吉林大学学报(工学版), 2022, 52(11): 2644-2652. |
| [13] | 刘远红,郭攀攀,张彦生,李鑫. 基于黎曼流形的稀疏图保持投影的特征提取[J]. 吉林大学学报(工学版), 2021, 51(6): 2268-2279. |
| [14] | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报(工学版), 2021, 51(1): 349-357. |
| [15] | 胡钊政,李招康,陶倩文. 基于分布式二维激光测距仪的室内行人检测与跟踪[J]. 吉林大学学报(工学版), 2020, 50(2): 719-729. |
|
||