吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (6): 2003-2014.doi: 10.13229/j.cnki.jdxbgxb.20230939
基于深度学习的高速公路小目标检测算法
徐慧智1( ),郝东升1,徐小婷2,蒋时森1
),郝东升1,徐小婷2,蒋时森1
- 1.东北林业大学 土木与交通学院,哈尔滨 150040
2.浙江公路技师学院 试验检测中心,杭州 310007
Expressway small object detection algorithm based on deep learning
Hui-zhi XU1(),Dong-sheng HAO1,Xiao-ting XU2,Shi-sen JIANG1
- 1.School of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150040,China
2.Test and Inspection Center,Zhejiang Highway Technician College,Hangzhou 310007,China
摘要:
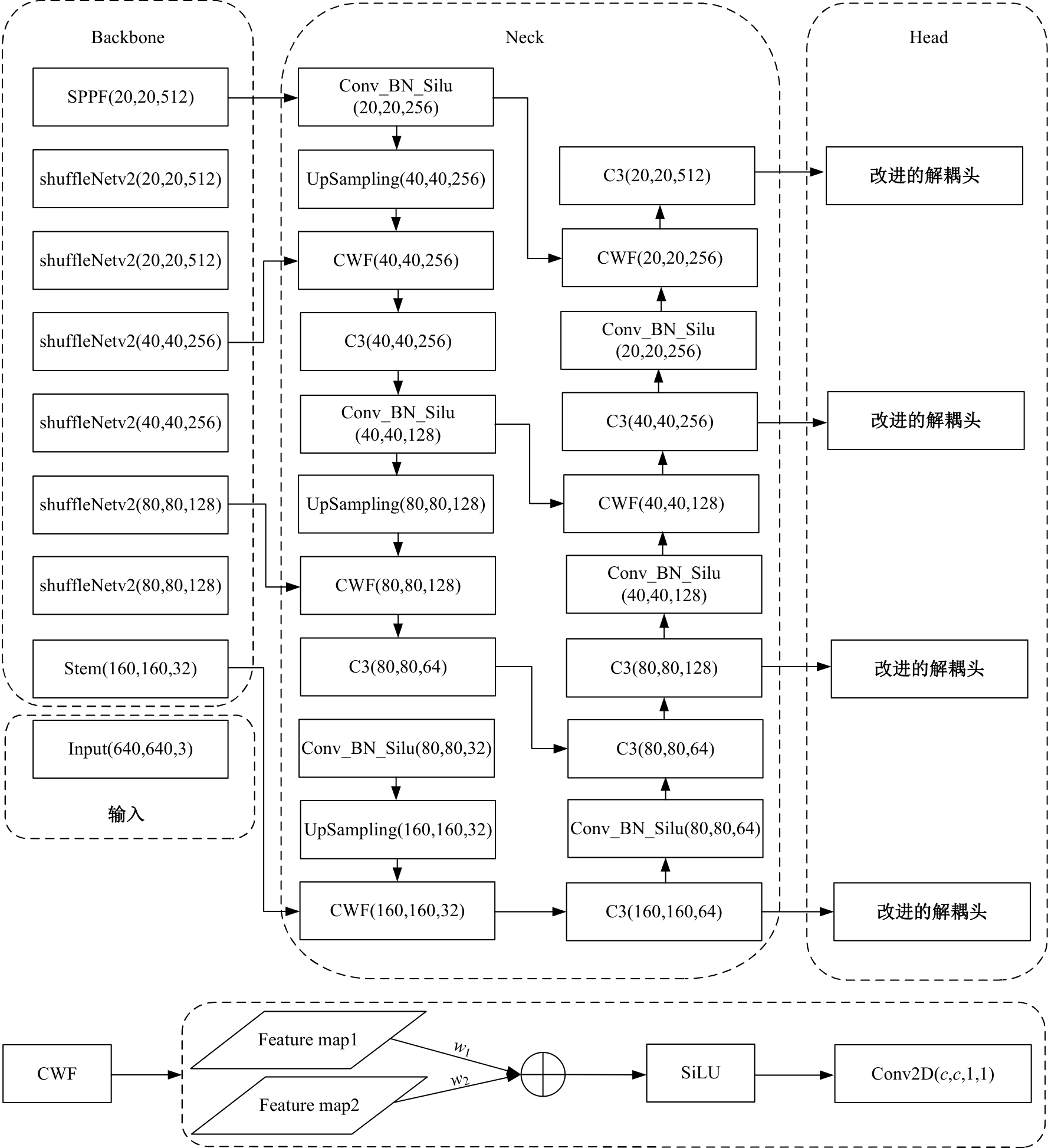
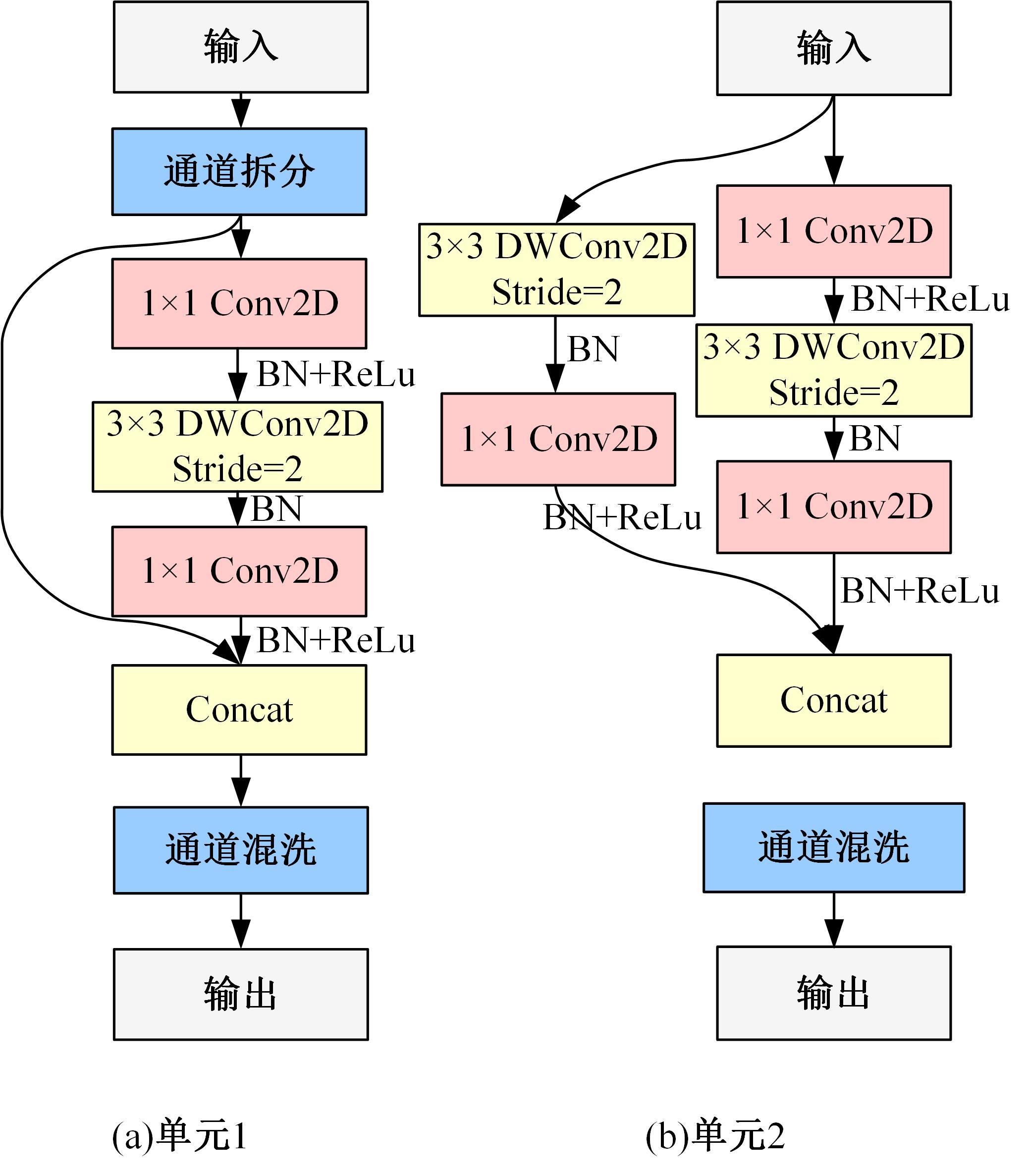
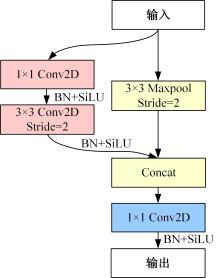
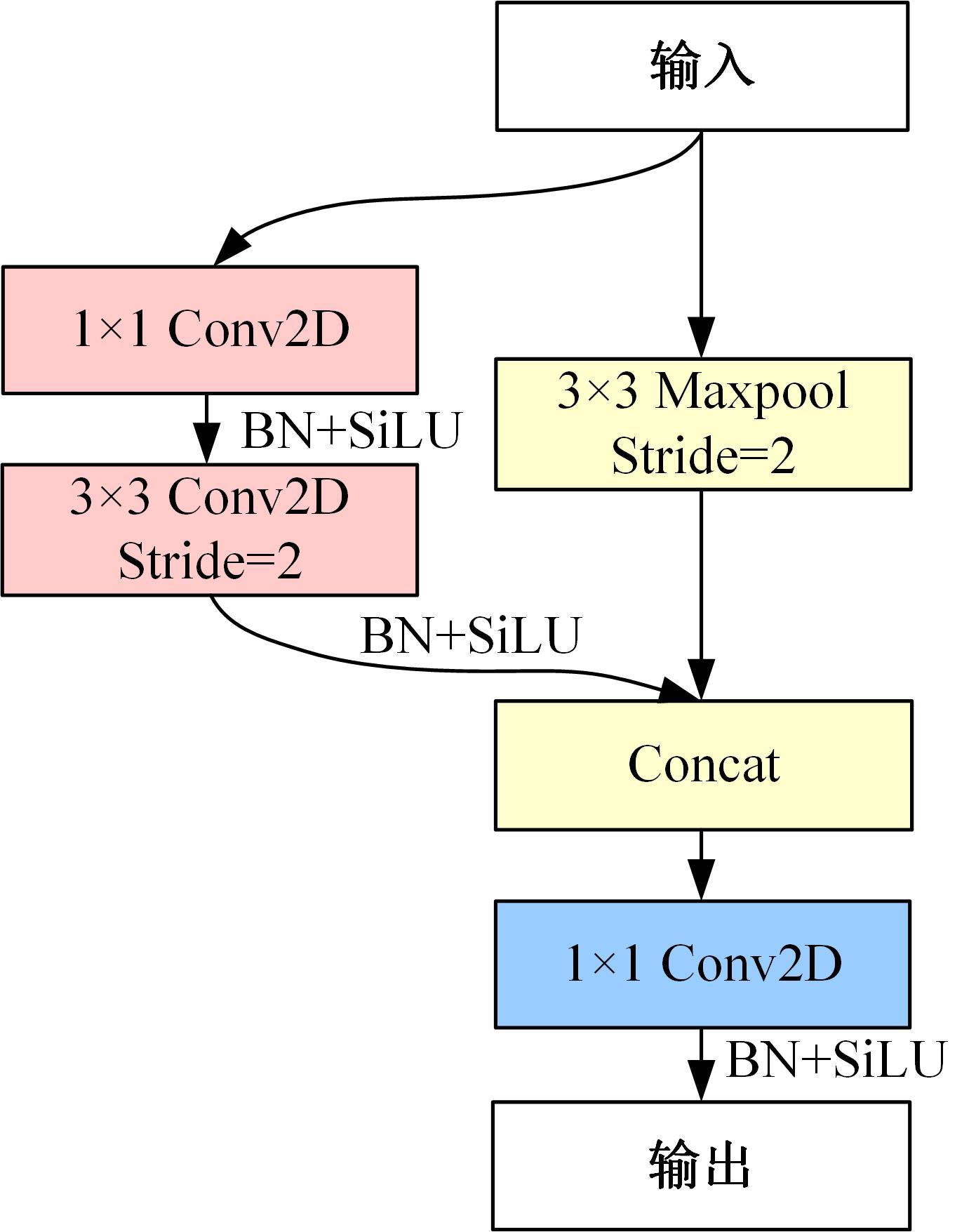
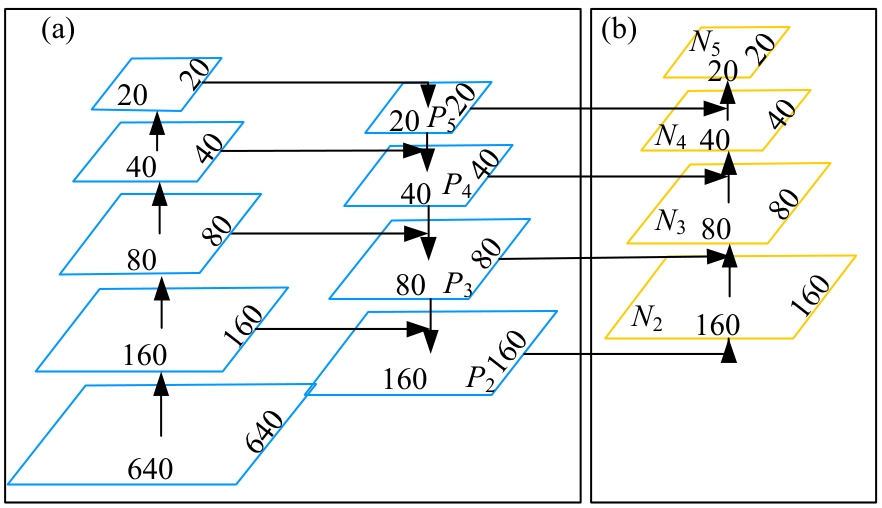
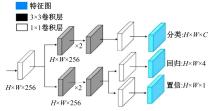
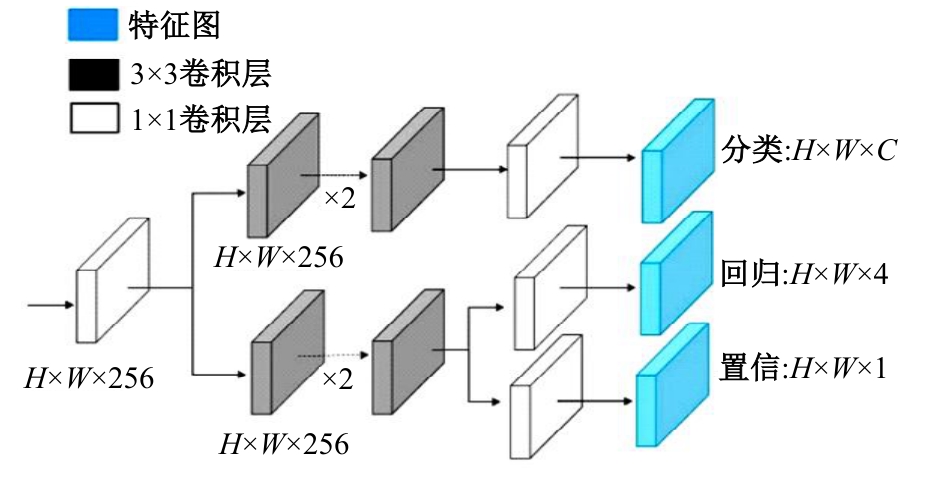
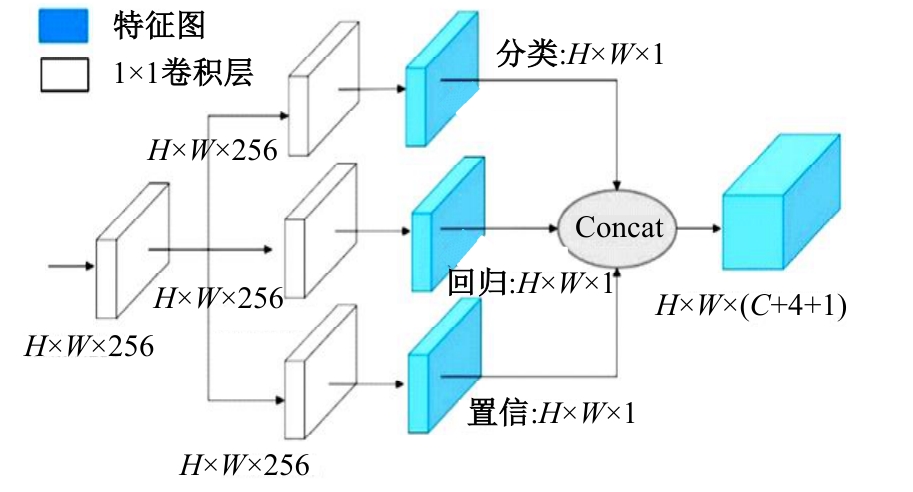
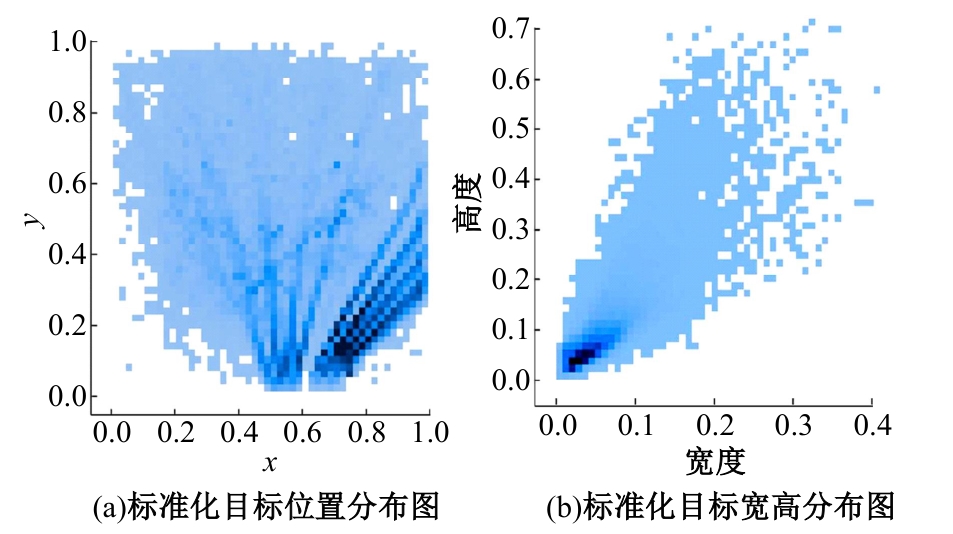
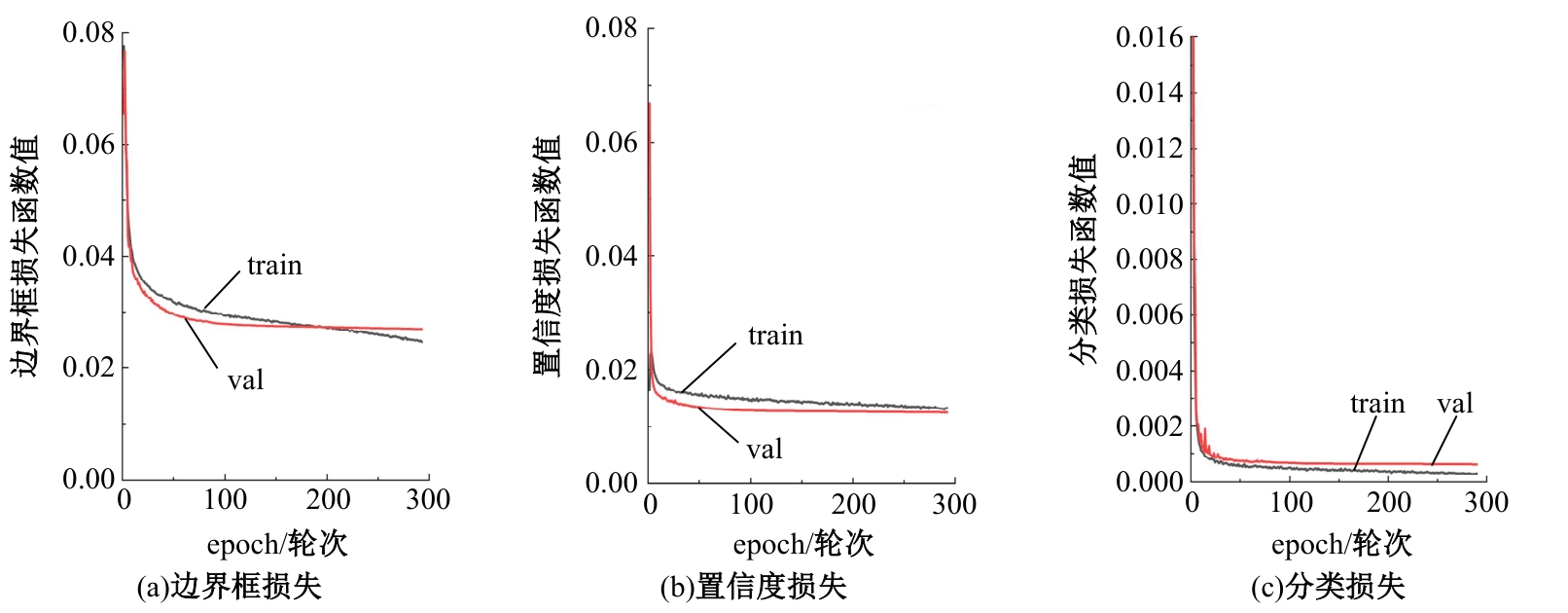
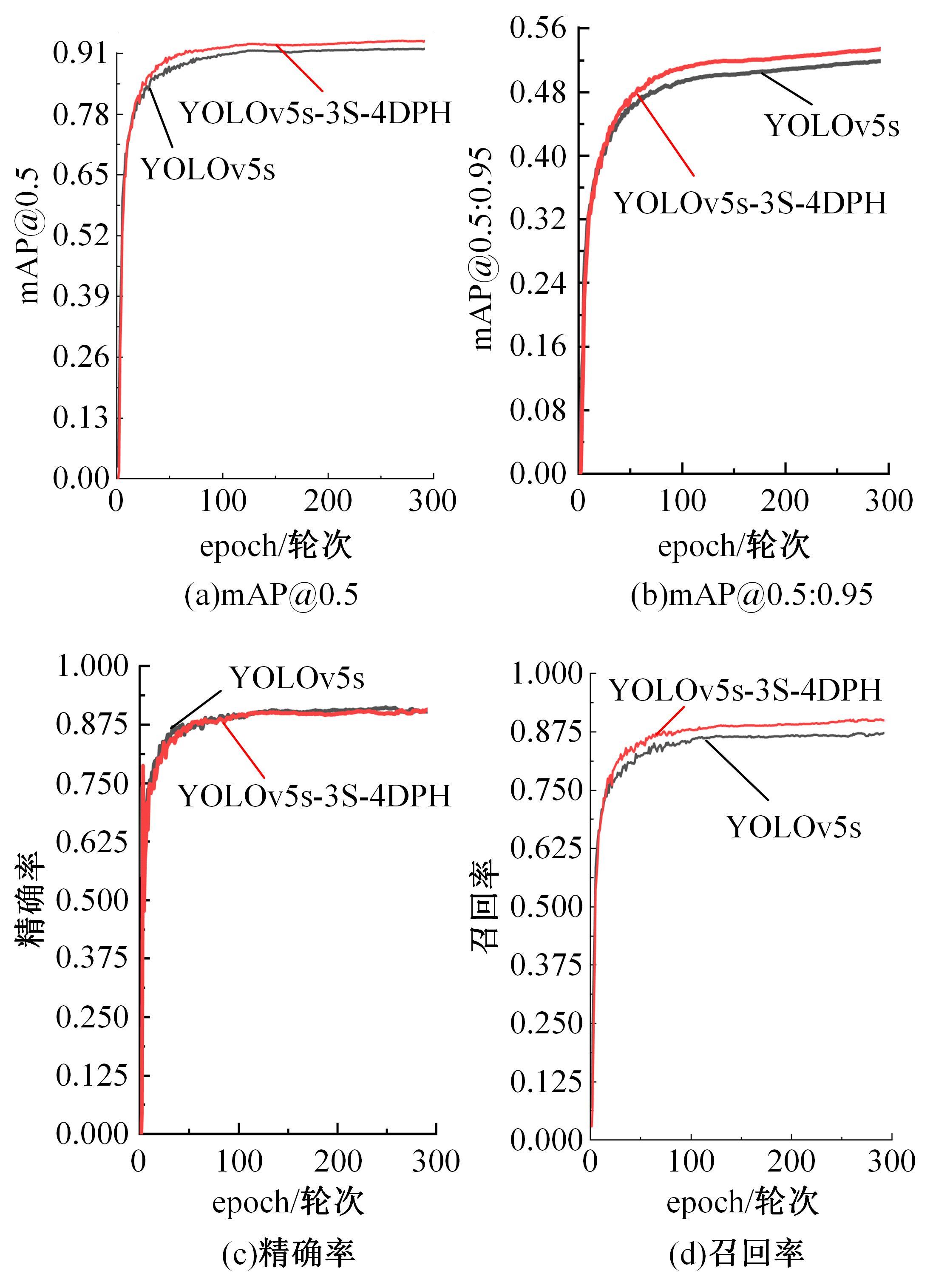
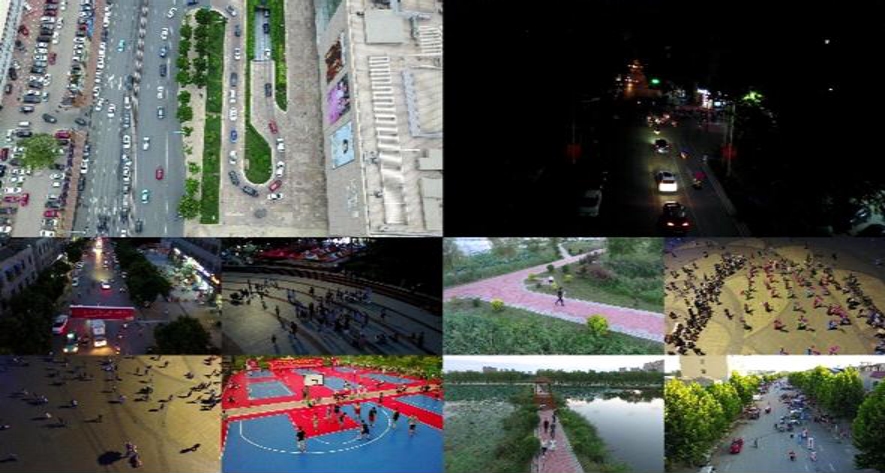
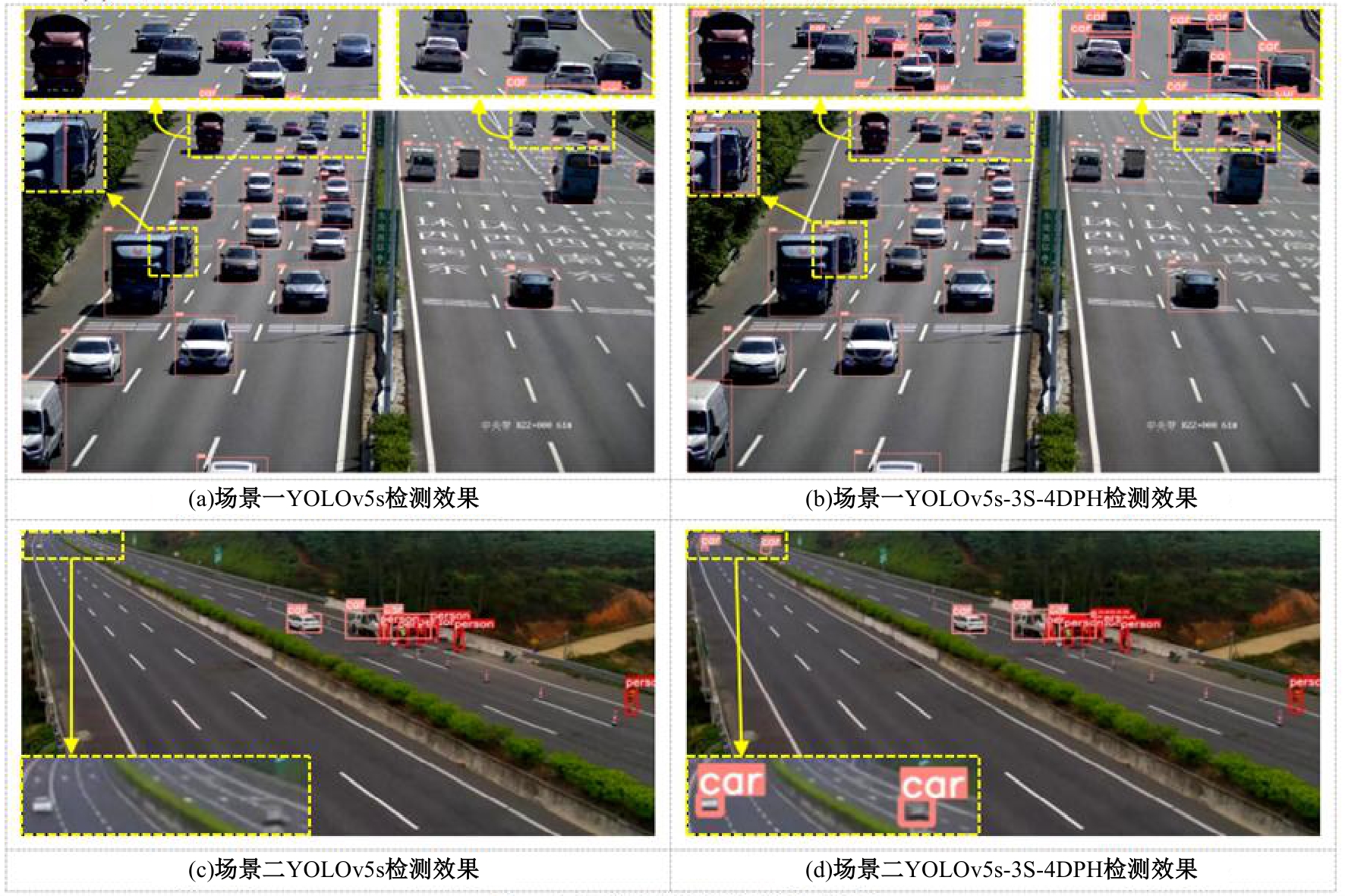
针对高速公路路侧摄像头拍摄的图像中,远端的行人和车辆目标小、实时检测难问题,提出一种改进的目标检测算法YOLOv5s-3S-4PDH。首先,采用Shufflenetv2-Stem-SPPF网络结构,提高模型的运行速度;其次,引入加速归一化加权融合特征图和160×160小目标检测层,优化小目标检测性能;然后,引入改进的解耦头机制,提高小目标检测的定位和分类精度;最后,采用Focal EIoU作为定位损失函数,加快模型训练的收敛速度。在自建行人和车辆数据集上进行对比实验,结果表明:该算法与YOLOv5s基准网络算法相比,计算量和参数量分别减少了10.1%和24.6%,检测速度和精度分别提高了15.4%和2.1%;在VisDrone2019数据集上进行的迁移学习实验表明,该算法对所有目标类别的平均精度高于YOLOv5s。YOLOv5s-3S-4PDH算法在满足小目标检测实时性与精度的同时,也具备泛化能力。
中图分类号:
- U495







| [1] | 梁鸿, 王庆玮, 张千, 等. 小目标检测技术研究综述[J]. 计算机工程与应用, 2021, 57(1): 17-28. |
| Liang Hong, Wang Qing-wei, Zhang Qian, et al. Small object detection technology: a review[J]. Computer Engineering and Applications, 2021, 57(1): 17-28. | |
| [2] | Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[J]. Computer Science, 2014, 21(8): 91-103. |
| [3] | Krizhevsky A, Sutskever I, Hinton E G. ImageNet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6): 84-90. |
| [4] | 王芋人, 武德安. 一种提高小目标检测准确率的数据增强方法[J]. 激光杂志, 2021, 42(11): 41-45. |
| Wang Yu-ren, Wu De-an. Data augmentation method for improving the accuracy of small target detection[J]. Laser Journal, 2021, 42(11): 41-45. | |
| [5] | 杨慧剑, 孟亮. 基于改进的YOLOv5的航拍图像中小目标检测算法[J]. 计算机工程与科学, 2023, 45(6): 1063-1070. |
| Yang Hui-jian, Meng Liang. A small target detection algorithm based on improved YOLOv5 in aerial image[J]. Computer Engineering & Science, 2023, 45(6): 1063-1070. | |
| [6] | Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [7] | Singh B, Davis L S. An analysis of scale invariance in object detection-SNIP[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018:3578-3587. |
| [8] | Zhang S, Zhu X, Lei Z, et al. Faceboxes:a CPU real-time face detector with high accuracy[C]∥IEEE International Joint Conference on Biometrics, Denver, USA, 2017: 1-9. |
| [9] | 王建中, 王加乐, 于子博, 等. 士兵和装甲车目标多尺度检测方法[J]. 北京理工大学学报, 2023, 43(2): 203-212. |
| Wang Jian-zhong, Wang Jia-le, Yu Zi-bo, et al. Multi-scale detection method for soldier and armored vehicle objects[J]. Transactions of Beijing Institute of Technology, 2023, 43(2): 203-212. | |
| [10] | 谌雨章, 黄逸姿, 张钧涵. 基于多速率空洞卷积的多尺度水下小目标检测[J]. 计算机工程, 2023, 49(6): 257-264. |
| Chen Yu-zhang, Huang Yi-zi, Zhang Jun-han. Multi-scale underwater small object detection based on multi-rate dilated convolution[J]. Computer Engineering, 2023, 49(6): 257-264. | |
| [11] | 李成豪, 张静, 胡莉, 等. 基于多尺度感受野融合的小目标检测算法[J]. 计算机工程与应用, 2022, 58(12): 177-182. |
| Li Cheng-hao, Zhang Jing, Hu Li, et al. Small object detection algorithm based on multiscale receptive field fusion[J]. Computer Engineering and Applications, 2022, 58(12): 177-182. | |
| [12] | 董亚盼, 高陈强, 谌放, 等. 基于注意力机制的红外小目标检测方法[J]. 重庆邮电大学学报: 自然科学版, 2023, 35(2): 219-226. |
| Dong Ya-pan, Gao Chen-qiang, Chen Fang, et al. Infrared small target detection method based on attention mechanism[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2023, 35(2): 219-226. | |
| [13] | Qu J S, Su C, Zhang Z W, et al. Dilated convolution and feature fusion SSD network for small object detection in remote sensing images[J]. IEEE Access, 2020, 8: 82832-82843. |
| [14] | Li K, Cheng G, Bu S, et al. Rotation-insensitive and context-augmented object detection in remote sensing images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 56(4): 2337-2348. |
| [15] | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 779-788. |
| [16] | Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6517-6525. |
| [17] | Redmon J, Farhadi A. YOLOv3: an incremental improvement[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018:1-6. |
| [18] | Bochkovskiy A, Wang C Y, Liao H. YOLOv4: optimal speed and accuracy of object detection[DB/OL].[2023-06-05]. |
| [19] | Liu S, Qi L, Qin H, et al. Path aggregation network for instance segmentation[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 8759-8768. |
| [20] | Ma N, Zhang X, Zheng H T, et al. ShuffleNet: an extremely efficient convolutional neural network for mobile devices[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 116-131. |
| [21] | Yu C, Gao C, Wang J, et al. BiSeNet V2: bilateral network with guided aggregation for real-time semantic segmentation[J]. International Journal of Computer Vision, 2021, 129: 3051-3068. |
| [22] | 陈奎, 刘晓, 贾立娇, 等. 基于轻量化网络与增强多尺度特征融合的绝缘子缺陷检测[J].高压技术,2024(3):1289-1300. |
| Chen Kui, Liu Xiao, Jia Li-jiao, et al. Insulator defect detection based on lightweight network and enhanced multi-scale feature fusion[J].高压技术,2024(3):1289-1300. | |
| [23] | Tan M, Pang R, Le A V. EfficientDet: scalable and efficient object detection[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020:10778-10787. |
| [24] | 高新波, 莫梦竟成, 汪海涛, 等. 小目标检测研究进展[J]. 数据采集与处理, 2021, 36(3):391-417. |
| Gao Xin-bo, Jing-cheng Momeng, Wang Hai-tao, et al. Recent advances in small object detection[J]. Journal of Data Acquisition and Processing, 2021, 36(3):391-417. | |
| [25] | Lin T Y, Dollar P, Girshick R, et al. Feature pyramid networks for object detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition Honolulu, USA, 2017: 2117-2125. |
| [26] | Song G, Liu Y, Wang X. Revisiting the sibling head in object detector[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 11560-11569. |
| [27] | Ge Z, Liu S, Wang F, et al. YOLOX: exceeding YOLO series in 2021[DB/OL]. [2023-06-10]. |
| [28] | Zhang Y F, Ren W, Zhang Z, et al. Focal and efficient IOU loss for accurate bounding box regression[J]. Neurocomputing, 2022, 506: 146-157. |
| [29] | 徐慧智, 宋爱秋, 武笑宇. 基于均匀设计的船舶目标检测深度学习模型训练方法[J]. 科学技术与工程, 2022, 22(25): 11241-11249. |
| Xu Hui-zhi, Song Ai-qiu, Wu Xiao-yu. Training method of deep learning to ship target detection based on uniform design[J]. Science Technology and Engineering, 2022, 22(25) : 11241-11249. | |
| [30] | 冒国韬, 邓天民, 于楠晶. 基于多尺度分割注意力的无人机航拍图像目标检测算法[J]. 航空学报, 2023, 44(5): 273-283. |
| Mao Guo-tao, Deng Tian-min, Yu Nan-jing. Object detection in UAV images based on multiscale split attention[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 273-283. |
| [1] | 何庆龄,裴玉龙,侯琳,刘静,潘胜. 混合策略改进WOA-BiLSTM的快速路出口匝道车速预测[J]. 吉林大学学报(工学版), 2025, 55(6): 2038-2049. |
| [2] | 张汝波,常世淇,张天一. 基于深度学习的图像信息隐藏方法综述[J]. 吉林大学学报(工学版), 2025, 55(5): 1497-1515. |
| [3] | 李健,刘欢,李艳秋,王海瑞,关路,廖昌义. 基于THGS算法优化ResNet-18模型的图像识别[J]. 吉林大学学报(工学版), 2025, 55(5): 1629-1637. |
| [4] | 田丽,贾煜辉. 改进YOLOv5s算法的高光谱遥感图像目标检测[J]. 吉林大学学报(工学版), 2025, 55(5): 1742-1748. |
| [5] | 文斌,丁弈夫,杨超,沈艳军,李辉. 基于自选择架构网络的交通标志分类算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1705-1713. |
| [6] | 孟祥海,王国锐,张明扬,田毕江. 基于选择集成的山区高速事故预测模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1298-1306. |
| [7] | 李振江,万利,周世睿,陶楚青,魏巍. 基于时空Transformer网络的隧道交通运行风险动态辨识方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1336-1345. |
| [8] | 吴文静,邓淳淳,贾洪飞,孙舒航. 内涝影响下路网畅通可靠度评估及关键路段识别[J]. 吉林大学学报(工学版), 2025, 55(4): 1250-1257. |
| [9] | 岳昊,常笑,刘建业,曲秋莳. 引入车辆窗的定制公交线路优化[J]. 吉林大学学报(工学版), 2025, 55(4): 1266-1274. |
| [10] | 郑利民,陈双,李刚. YOLOv5网络算法下交通监控视频违章车辆多目标检测[J]. 吉林大学学报(工学版), 2025, 55(2): 693-699. |
| [11] | 赵孟雪,车翔玖,徐欢,刘全乐. 基于先验知识优化的医学图像候选区域生成方法[J]. 吉林大学学报(工学版), 2025, 55(2): 722-730. |
| [12] | 马书红,张俊杰,陈西芳,廖国美. 利用出租车时序数据识别城市功能区[J]. 吉林大学学报(工学版), 2025, 55(2): 603-613. |
| [13] | 高天洋,胡大伟,姜瑞森,吴雪,刘慧甜. 基于模块化车辆的区域灵活接驳公交线路优化[J]. 吉林大学学报(工学版), 2025, 55(2): 537-545. |
| [14] | 才华,郑延阳,付强,王晟宇,王伟刚,马智勇. 基于多尺度候选融合与优化的三维目标检测算法[J]. 吉林大学学报(工学版), 2025, 55(2): 709-721. |
| [15] | 李昱燃,汪飞,朱才华,韩飞,李岩. 污染天气居民通勤模式选择影响因素的链式效用[J]. 吉林大学学报(工学版), 2025, 55(2): 577-590. |
|