吉林大学学报(工学版) ›› 2026, Vol. 56 ›› Issue (1): 247-256.doi: 10.13229/j.cnki.jdxbgxb.20240678
基于分布式模型预测的商用车队列避障控制
李文博1( ),谢华城1,于树友1,2,林宝君1(),陈虹1,3
),谢华城1,于树友1,2,林宝君1(),陈虹1,3
- 1.吉林大学 通信工程学院,长春 130022
2.重庆邮电大学 工业物联网与网络化控制教育部重点实验室,重庆 400065
3.同济大学 电子与信息工程学院,上海 200092
Obstacle avoidance control for truck platoon using distributed model predictive control
Wen-bo LI1(),Hua-cheng XIE1,Shu-you YU1,2,Bao-jun LIN1(),Hong CHEN1,3
- 1.College of Control Science and Engineering,Jilin University,Changchun 130022,China
2.The Key Laboratory of Industrial Internet of Things and Networked Control,Chongqing University of Posts and Telecommunications,Chongqing 400065,China
3.College of Electronics and Information Engineering,Tongji University,Shanghai 200092,China
摘要:
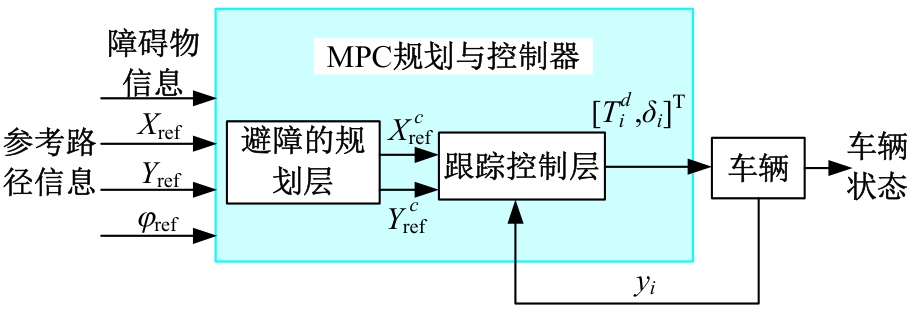
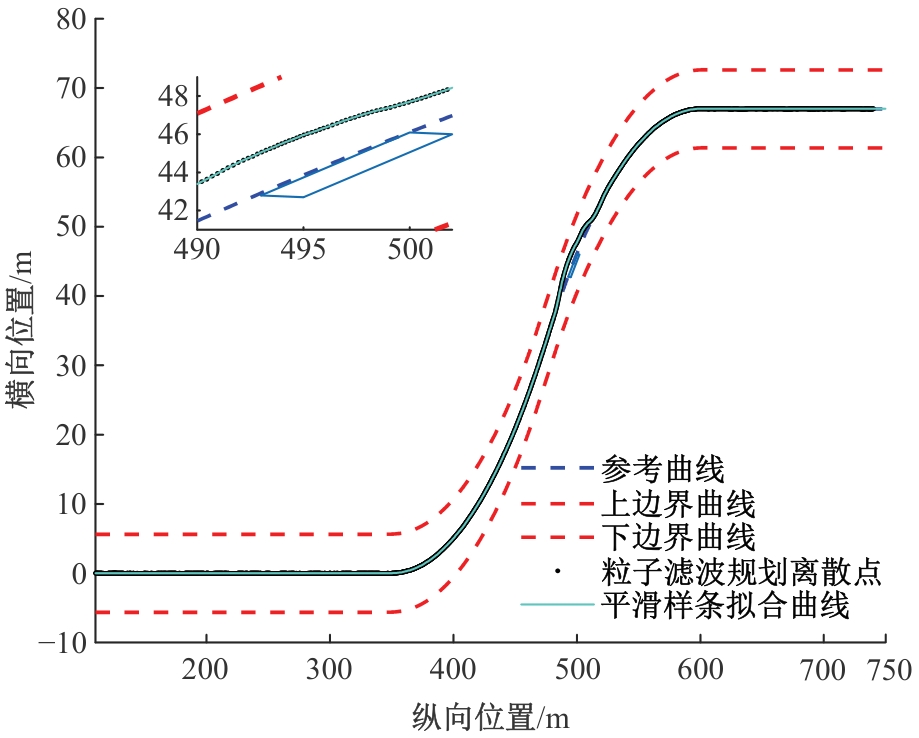
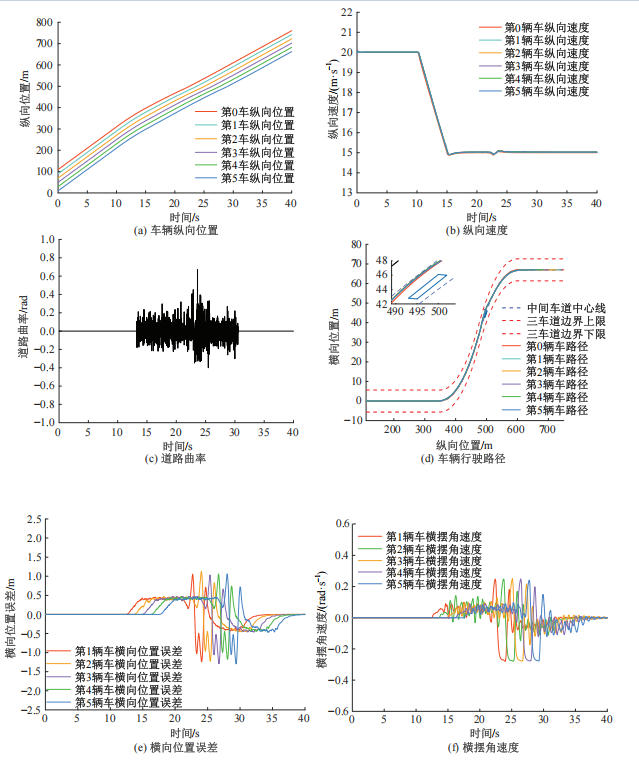
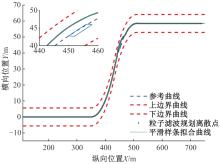
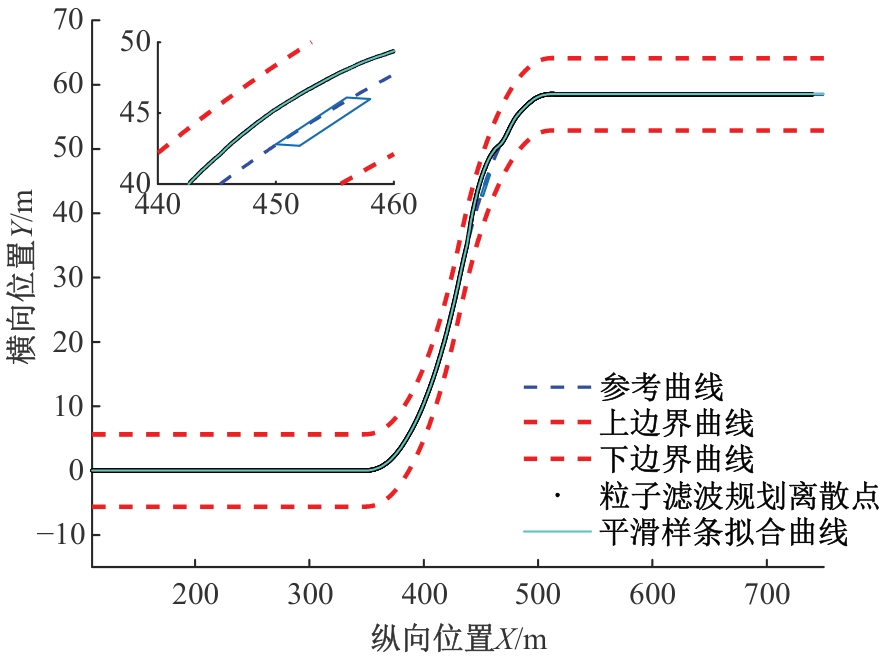
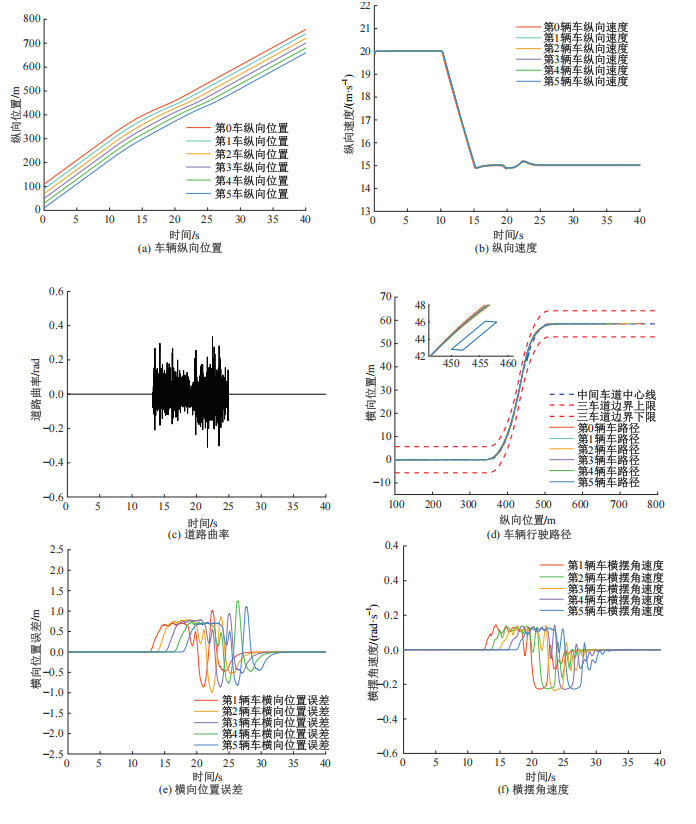
针对商用车队列避障控制问题,提出了上层轨迹规划和下层轨迹跟踪的分层控制方法。在上层中,设计了基于滚动时域优化的领航车轨迹规划方法,其中利用粒子滤波算法将求解优化问题转化为概率估计问题,提高了求解效率。在下层中,针对商用车横纵耦合动力学非线性强的特性,本文设计了基于纵横一体化动力学模型的分布式模型预测控制器,提高了控制精度。TruckSim和Matlab/Simulink的仿联合仿真结果表明:设计的双层控制架构能够保证车辆编队实现避障行驶;在多种道路场景下,所设计的分布式模型预测控制器可以有效跟踪规划轨迹。
中图分类号:
- TP273


| [1] | Liang K Y, Martensson J, Karl H,et al. Heavy-duty vehicle platoon formation for fuel efficiency[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1051-1061. |
| [2] | Li Y, Tang C, Peeta S, et al. Integral-sliding-mode braking control for a connected vehicle platoon: theory and application[J]. IEEE Transactions on Industrial Electronics, 2018, 66(6): 4618-4628. |
| [3] | Sawant J, Chaskar U, Ginoya D. Robust control of cooperative adaptive cruise control in the absence of information about preceding vehicle acceleration[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9): 5589-5598. |
| [4] | Zheng Y, Li S E, Wang J Q, et al. Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(1): 14-26. |
| [5] | Bian Y, Li S E, Xu B, et al. Behavioral harmonization of a cyclic vehicular platoon in a closed road network[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(3): 559-570. |
| [6] | Bayuwindra A, Ploeg J, Lefeber E, et al. Combined longitudinal and lateral control of car-like vehicle platooning with extended look-ahead[J]. IEEE Transactions on Control Systems Technology, 2019, 28(3): 790-803. |
| [7] | Zhang D Z, Li K Q, Wang J Q. A curving ACC system with coordination control of longitudinal car-following and lateral stability[J]. Vehicle System Dynamics, 2012, 50(7): 1085-1102. |
| [8] | Wang Y L, Bian N, Zhang L, et al. Coordinated lateral and longitudinal vehicle-following control of connected and automated vehicles considering nonlinear dynamics[J]. IEEE Control Systems Letters, 2020, 4(4): 1054-1059. |
| [9] | Choi Y M, Park J H. Game-based lateral and longitudinal coupling control for autonomous vehicle trajectory tracking[J]. IEEE Access, 2021, 10: 31723-31731. |
| [10] | 于树友, 谢华成, 李文博, 等. 数字孪生驱动的商用车队列纵横向控制[J]. 吉林大学学报: 工学版, 2025, 55(6): 1994-2002. |
| Yu Shu-you, Xie Hua-cheng, Li Wen-bo, et al. Digital twin driven longitudinal and lateral control of truck platoon[J]. Journal of Jilin University(Engineering and Technology Edition),2025, 55(6): 1994-2002. | |
| [11] | Shi S M, Li L, Mu Y, et al. Stable headway prediction of vehicle platoon based on the 5-degree-of-freedom vehicle model[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(6): 1570-1585. |
| [12] | Rajamani R. Vehicle dynamics and control[M].Berlin: Springer Science & Business Media, 2011. |
| [13] | Besselink B, Johansson K H. String stability and a delay-based spacing policy for vehicle platoons subject to disturbances[J]. IEEE Transactions on Automatic Control, 2017, 62(9): 4376-4391. |
| [14] | Ghasemi A, Kazemi R, Azadi S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4299-4308. |
| [15] | Guo G, Wei Y. Hierarchical platoon control with heterogeneous information feedback[J]. IET Control Theory & Applications, 2011, 5(15): 1766-1781. |
| [16] | Fujioka T, Omae M. Vehicle following control in lateral direction for platooning[J]. Vehicle System Dynamics, 1998, 29(Sup.1): 422-437. |
| [17] | Wei S Y, Zou Y, Zhang X D, et al. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1116-1127. |
| [18] | Kianfar R, Ali M, Falcone P, et al. Combined longitudinal and lateral control design for string stable vehicle platooning within a designated lane[C]∥The 17th International IEEE Conference on Intelligent Transportation Systems(ITSC), Qingdao, China, 2014: 1003-1008. |
| [19] | Marino R, Scalzi S, Netto M. Nested PID steering control for lane keeping in autonomous vehicles[J]. Control Engineering Practice, 2011, 19(12): 1459-1467. |
| [20] | Tsugawa S, Kato S, Aoki K. An automated truck platoon for energy saving[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, USA, 2011: 4109-4114. |
| [21] | Askari I, Zeng S, Fang H. Nonlinear model predictive control based on constraint-aware particle filtering/smoothing[C]∥American Control Conference (ACC), New Orleans, USA,2021: 3532-3537. |
| [22] | Mammar S, Koenig D. Vehicle handling improvement by active steering[J]. Vehicle System Dynamics, 2002, 38(3): 211-242. |
| [23] | Gao Y. Model predictive control for autonomous and semiautonomous vehicles[D]. Berkeley: College of Engineering,University of California, 2014. |
| [24] | Askari I, Badnava B, Woodruff T, et al. Sampling-based nonlinear MPC of neural network dynamics with application to autonomous vehicle motion planning[C]∥American Control Conference(ACC), Atlanta,USA,2022: 2084-2090. |
| [25] | Feng Y Y, Yu S Y, Sheng E C, et al. Distributed MPC of vehicle platoons considering longitudinal and lateral coupling[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(3): 2293-2310. |
| [26] | Hichri Y, Cerezo V, Do M. Friction on road surfaces contaminated by fine particles: some new experimental evidences[J]. Journal of Engineering Tribology, 2017, 231(9): 1209-1225. |
| [1] | 孙鹏远,陈国栋,张慧峰,陈伟轩,刘帅. 基于自适应观测器的氢内燃机排气流量估计[J]. 吉林大学学报(工学版), 2025, 55(9): 2837-2846. |
| [2] | 王菲,陆恒辉,卢荡. 基于UniTire轮胎模型的车辆稳定性控制[J]. 吉林大学学报(工学版), 2025, 55(9): 2864-2873. |
| [3] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [4] | 王旭. 四足机器人运动及稳定控制关键技术综述[J]. 吉林大学学报(工学版), 2025, 55(5): 1483-1496. |
| [5] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [6] | 胡云峰,李佳敏,唐志国. 移动装弹机械臂的逆运动学多种群灰狼算法求解方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1443-1452. |
| [7] | 宫洵,任航,张华霖,汪介瑜,胡云峰,孙耀. 冬季网联纯电动汽车热泵空调生态制热控制方法[J]. 吉林大学学报(工学版), 2025, 55(3): 820-828. |
| [8] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [9] | 鲜斌,王光怡,蔡佳明. 多无人机吊挂负载运输系统的非线性鲁棒控制设计[J]. 吉林大学学报(工学版), 2024, 54(6): 1788-1795. |
| [10] | 王宏志,王婷婷,兰淼淼,徐硕. 基于位置跟踪的机械臂多电机新型滑模控制策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1443-1458. |
| [11] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [12] | 赵军,赵子亮,朱庆林,郭斌. 不依赖观测器的不确定性系统输出反馈鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(3): 828-835. |
| [13] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [14] | 江和耀,王永海,吴幼冬,王萍. 四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略[J]. 吉林大学学报(工学版), 2024, 54(2): 540-549. |
| [15] | 刘刚,范群,杨旭,任宏斌. 无人驾驶汽车变速换道轨迹跟踪动态控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3729-3739. |
|
||