吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (6): 1788-1795.doi: 10.13229/j.cnki.jdxbgxb.20220882
• 通信与控制工程 • 上一篇
多无人机吊挂负载运输系统的非线性鲁棒控制设计
鲜斌( ),王光怡,蔡佳明
),王光怡,蔡佳明
- 天津大学 电气自动化与信息工程学院,天津 300072
Nonlinear robust control design for multi unmanned aerial vehicles suspended payload transportation system
Bin XIAN(),Guang-yi WANG,Jia-ming CAI
- School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
摘要:
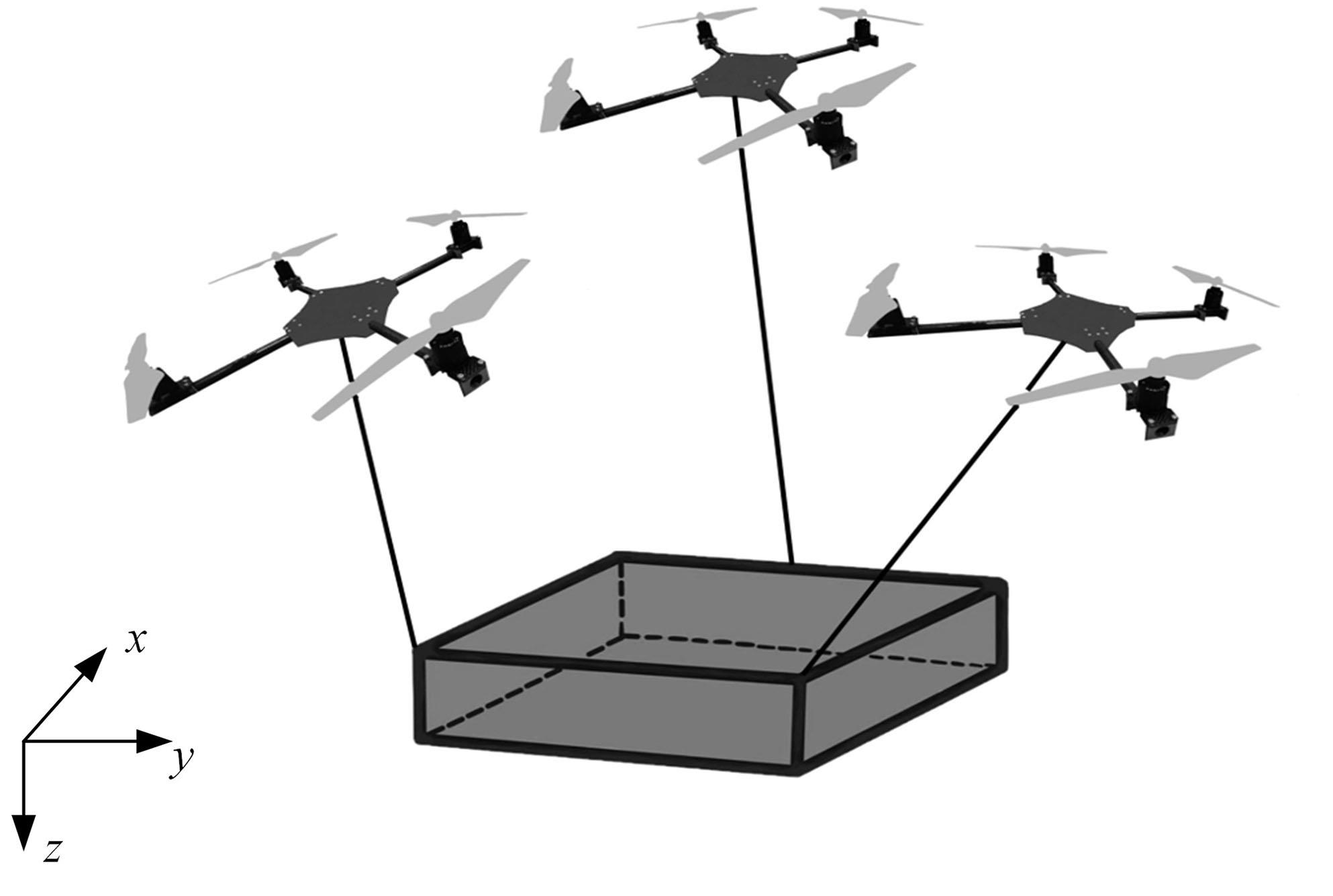
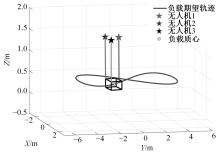
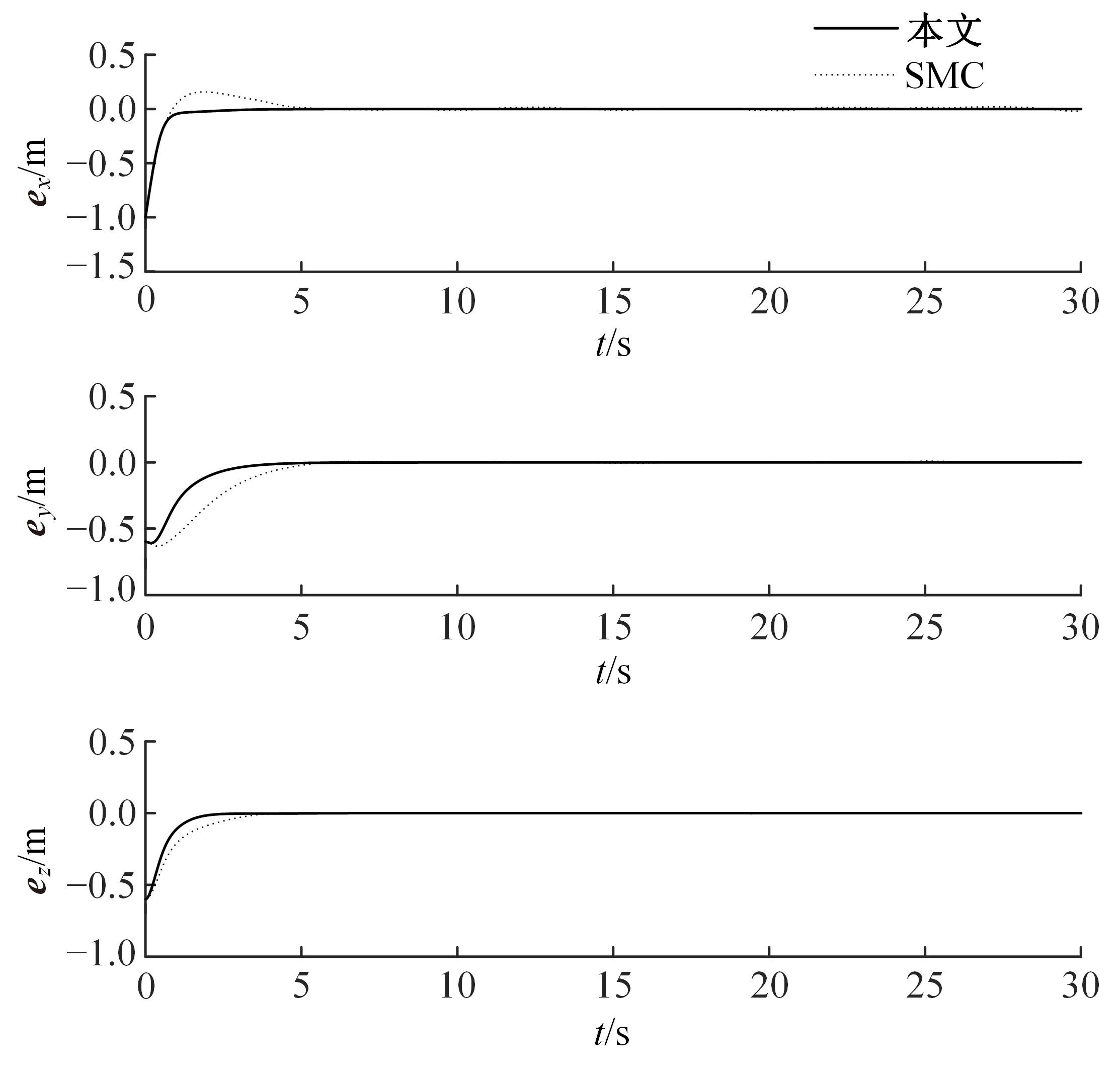
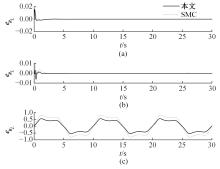
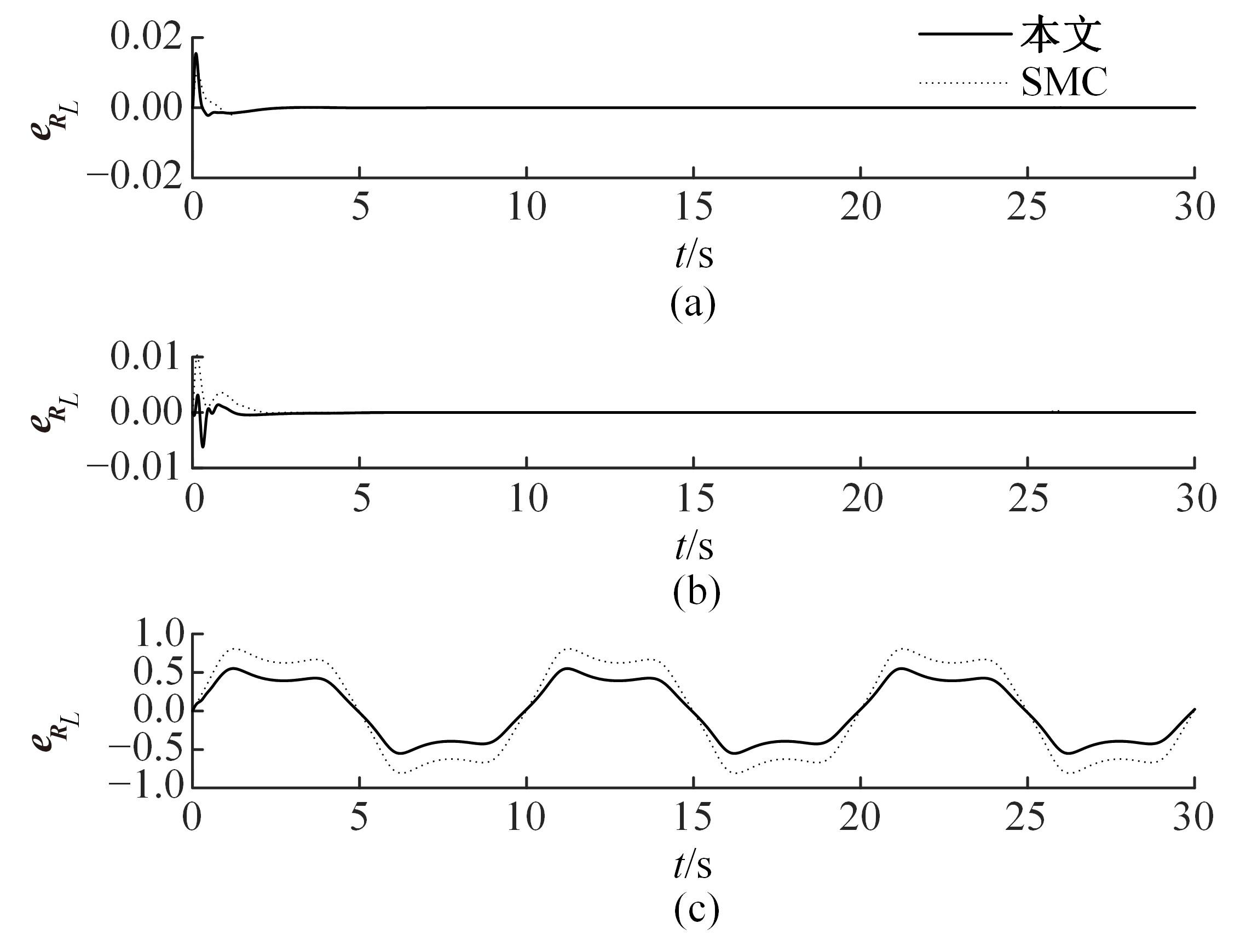
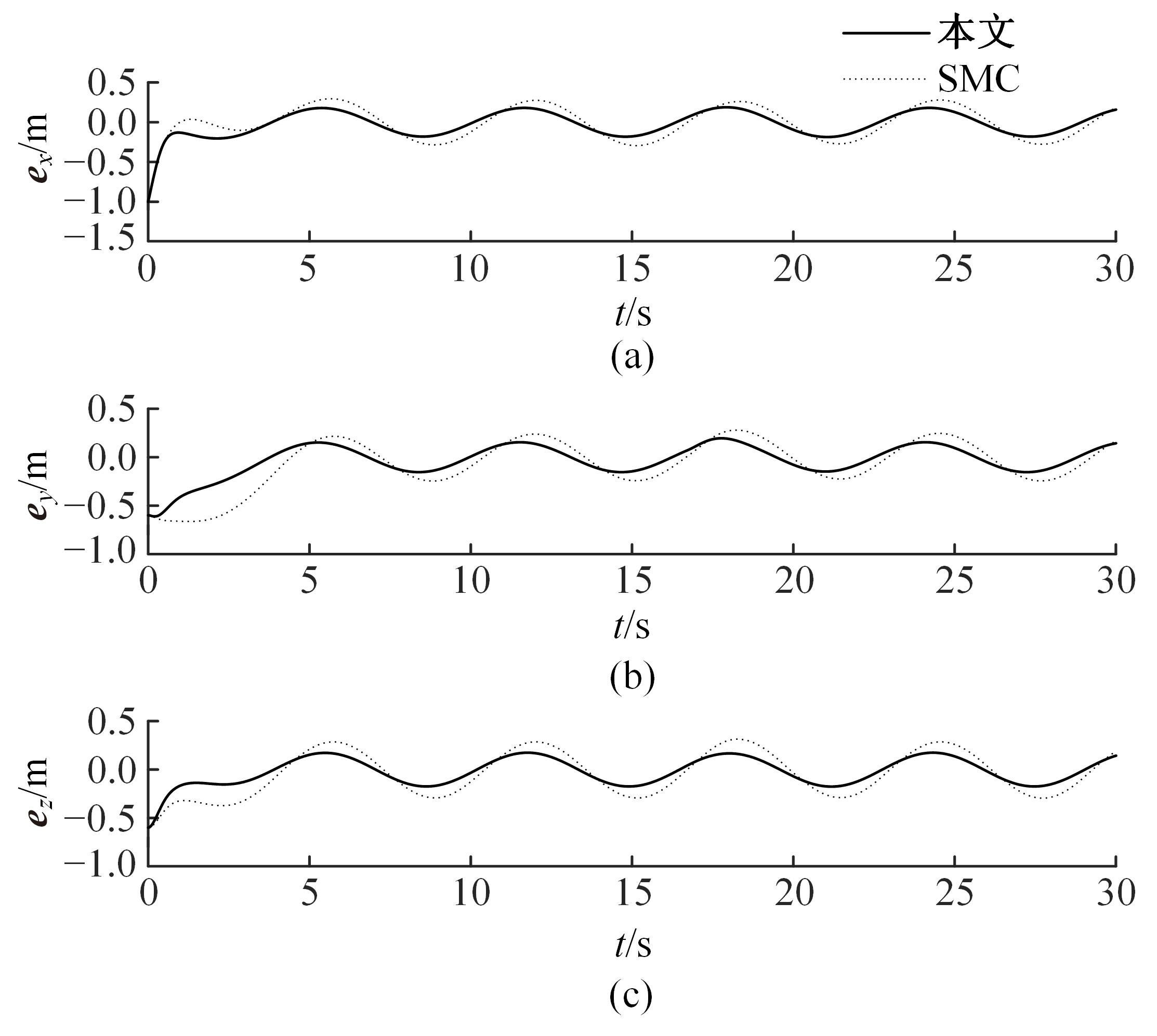
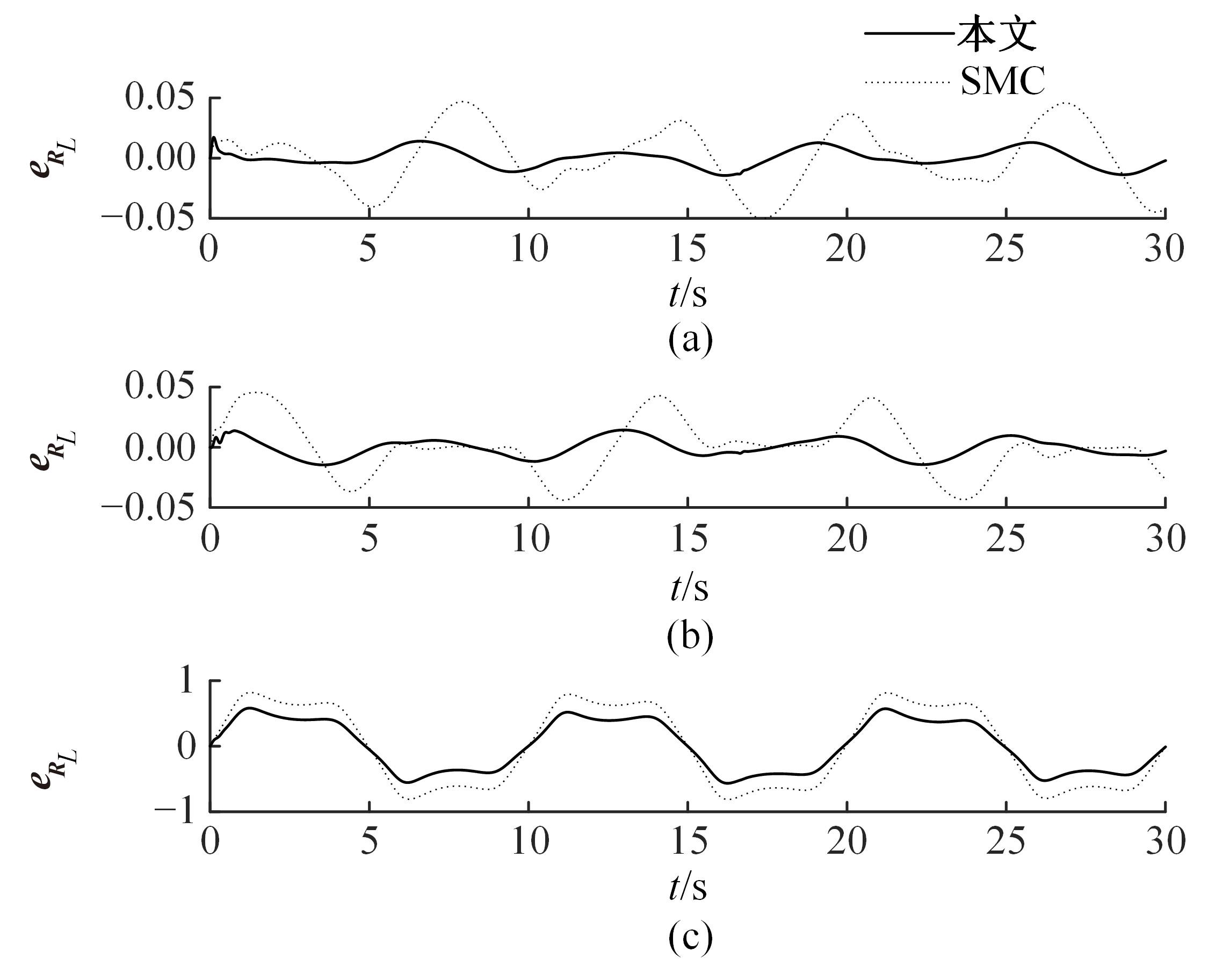
针对多无人机吊挂负载运输系统中负载的位置跟踪和姿态控制问题,提出了一种新型非线性鲁棒控制策略。首先,在存在未知外界扰动和考虑系统内部状态耦合的基础上,基于拉格朗日力学建立了多无人机吊挂负载运输系统的动力学模型。其次,设计了一种基于误差符号函数积分(RISE)和几何控制方法的非线性鲁棒控制策略,用于补偿未知外界扰动的影响,实现了对负载位姿的精确控制。基于Lyapunov方法的稳定性分析证明了闭环系统的稳定性和吊挂负载跟踪误差的渐近收敛。仿真结果表明,本文提出的控制策略可以实现良好的轨迹跟踪效果,并对外界干扰有较好的鲁棒性。
中图分类号:
- TP273





| 1 | Gao J, Zhang F, Huang P, et al. Observer-based second order sliding mode control for tethered quadrotor transportation[C]∥2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xi'ning, China, 2021: 1335-1342. |
| 2 | Pizetta I H B, Brandão A S, Sarcinelli-Filho M. Cooperative load transportation using three quadrotors[C]∥2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 2019: 644-650. |
| 3 | Mofid O, Mobayen S, Fekih A. Adaptive integral-type terminal sliding mode control for unmanned aerial vehicle under model uncertainties and external disturbances[J]. IEEE Access, 2021, 9: 53255-53265. |
| 4 | Xian B, Dawson D M, de Queiroz M S, et al. A continuous asymptotic tracking control strategy for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2004, 49(7): 1206-1211. |
| 5 | Gu X, Xian B, Wang Y. Agile flight for a quadrotor via robust geometry control: theory and experimental verification[J]. International Journal of Robust and Nonlinear Control, 2022, 32(7): 4236-4250. |
| 6 | 鲜斌, 李宏图. 分布式多无人机的时变编队非线性控制设计[J]. 控制与决策, 2021, 36(10): 2490-2496. |
| Xian Bin, Li Hong-tu. Time-varying formation nonlinear control of distributed multiple UAVs[J]. Control and Decision, 2021, 36(10): 2490-2496. | |
| 7 | Xian B, Yang S. Robust tracking control of a quadrotor unmanned aerial vehicle-suspended payload system[J]. IEEE/ASME Transactions on Mechatronics, 2020, 26(5): 2653-2663. |
| 8 | 鲜斌, 张诗婧, 韩晓薇, 等. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报: 工学版, 2021, 51(6): 2259-2267. |
| Xian Bin, Zhang Shi-jing, Han Xiao-wei, et al. Trajectory planning for the unmanned aerial vehicle (UAV) slung-payload aerial transportation system based on reinforcement learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2259-2267. | |
| 9 | Shirani B, Najafi M, Izadi I. Cooperative load transportation using multiple UAVs[J]. Aerospace Science and Technology, 2019, 84: 158-169. |
| 10 | Li X, Zhang J, Han J. Trajectory planning of load transportation with multi-quadrotors based on reinforcement learning algorithm[J]. Aerospace Science and Technology, 2021, 116: No.106887. |
| 11 | 梁潇, 王杨, 何慰, 等. 基于能量分析的欠驱动飞行吊运系统协同控制[J]. 控制理论与应用, 2020, 37(12): 2473-2481. |
| Liang Xiao, Wang Yang, He Wei, et al. Cooperative control for underactuated aerial transportation systems via the energy-based analysis[J]. Control Theory & Applications, 2020, 37(12): 2473-2481. | |
| 12 | Sreenath K, Lee T, Kumar V. Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load[C]∥52nd IEEE Conference on Decision and Control, Firenze, Italy, 2013: 2269-2274. |
| 13 | Lee T. Geometric control of quadrotor UAVs transporting a cable-suspended rigid body[J]. IEEE Transactions on Control Systems Technology, 2017, 26(1): 255-264. |
| 14 | Sanalitro D, Savino H J, Tognon M, et al. Full-pose manipulation control of a cable-suspended load with multiple UAVs under uncertainties[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2185-2191. |
| 15 | Fernando T, Chandiramani J, Lee T, et al. Robust adaptive geometric tracking controls on SO (3) with an application to the attitude dynamics of a quadrotor UAV[C]∥2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 2011: 7380-7385. |
| [1] | 王宏志,王婷婷,兰淼淼,徐硕. 基于位置跟踪的机械臂多电机新型滑模控制策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1443-1458. |
| [2] | 赵军,赵子亮,朱庆林,郭斌. 不依赖观测器的不确定性系统输出反馈鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(3): 828-835. |
| [3] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [4] | 陈珑茏,冯天宇,吕宗阳,吴玉虎. 共轴倾转旋翼无人机有限时间滑模姿态控制[J]. 吉林大学学报(工学版), 2023, 53(3): 883-890. |
| [5] | 齐国元,李阔,王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J]. 吉林大学学报(工学版), 2023, 53(3): 853-862. |
| [6] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [7] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [8] | 胡江平,周子粲,陈波. 基于方位测量的固定时间多目标定位和环航控制[J]. 吉林大学学报(工学版), 2023, 53(3): 923-932. |
| [9] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [10] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [11] | 马彦,郭则宣. 基于改进BPNN⁃MPF算法的锂离子电池SoE估计[J]. 吉林大学学报(工学版), 2023, 53(1): 263-272. |
| [12] | 孙晓东,张瑶,陈龙. 电动汽车永磁同步轮毂电机无差拍预测电压补偿控制[J]. 吉林大学学报(工学版), 2022, 52(10): 2213-2224. |
| [13] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [14] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [15] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
|
||