吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (9): 2687-2696.doi: 10.13229/j.cnki.jdxbgxb.20221401
• 通信与控制工程 • 上一篇
基于模型预测控制的滑移率控制方法
李寿涛1,2( ),杨路2,屈如意2,孙鹏鹏2,于丁力3
),杨路2,屈如意2,孙鹏鹏2,于丁力3
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
3.利物浦约翰摩尔大学 工程与技术学院,利物浦 L33AF
Slip rate control method based on model predictive control
Shou-tao LI1,2(),Lu YANG2,Ru-yi QU2,Peng-peng SUN2,Ding-li YU3
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
3.School of Engineering and Technology,Liverpool John Moores University,Liverpool L33AF,UK
摘要:
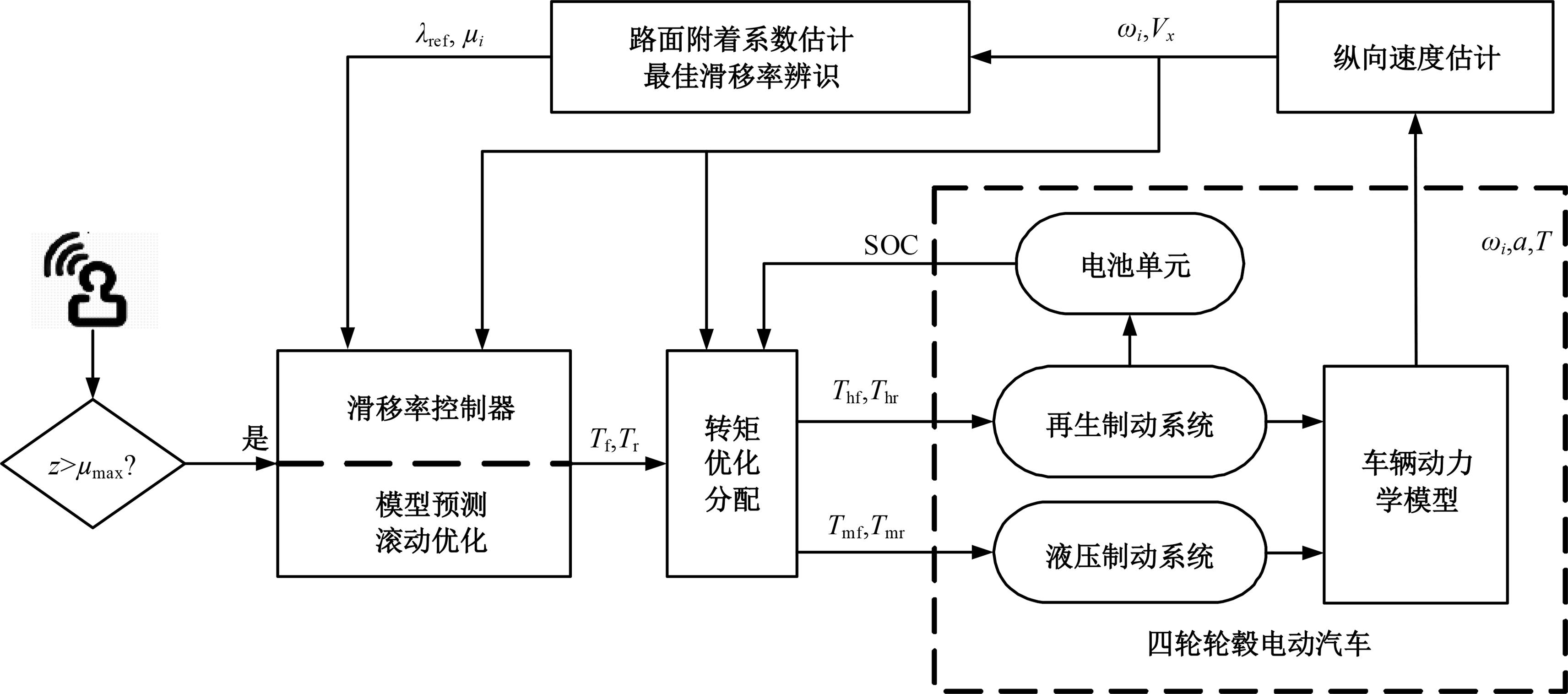
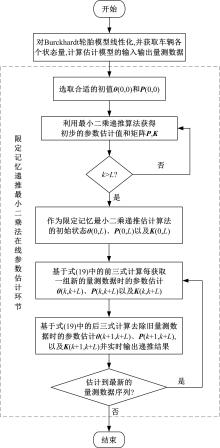
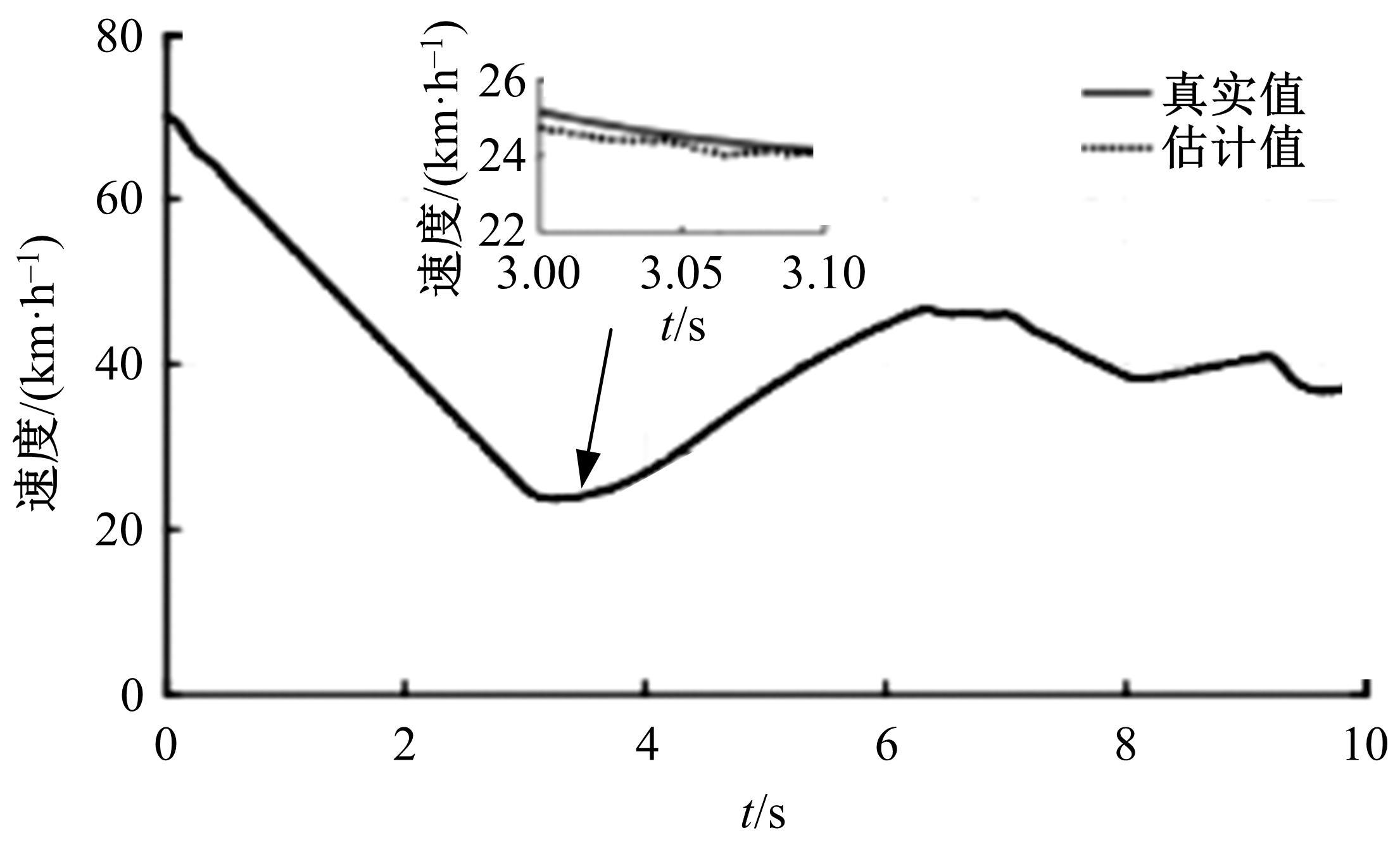
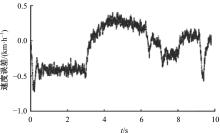
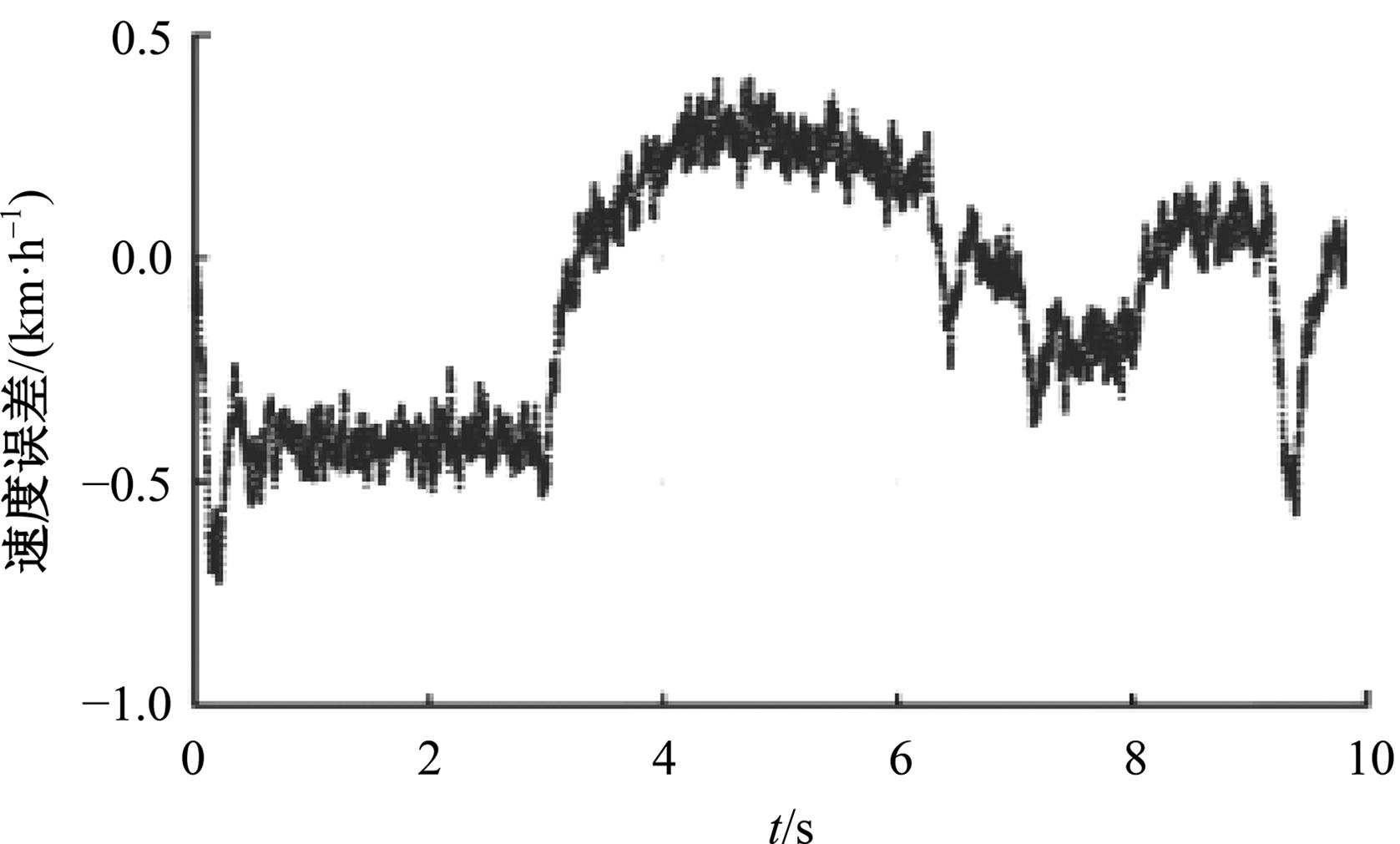
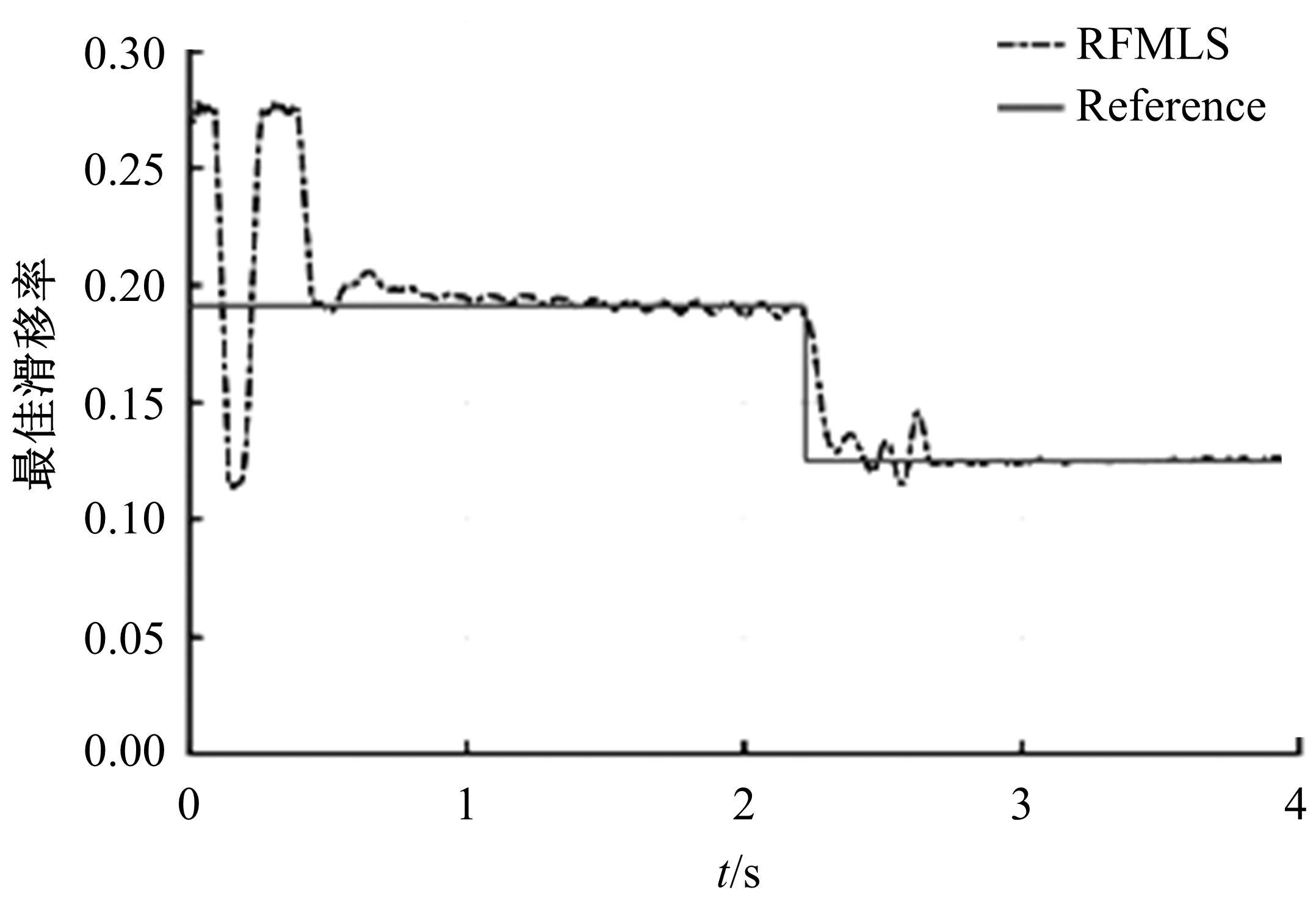
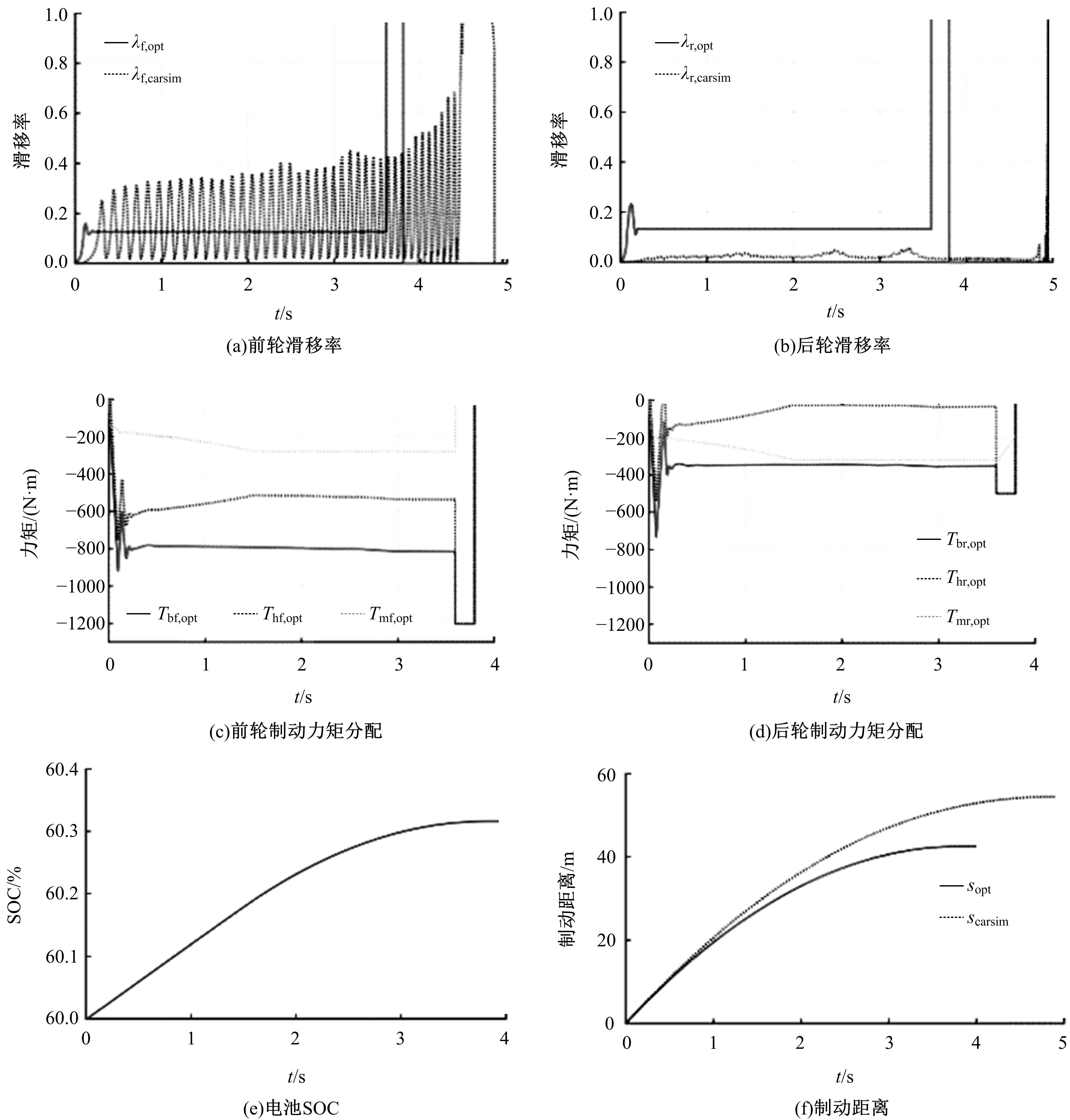
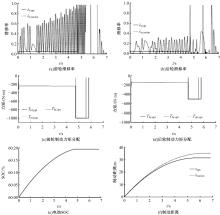
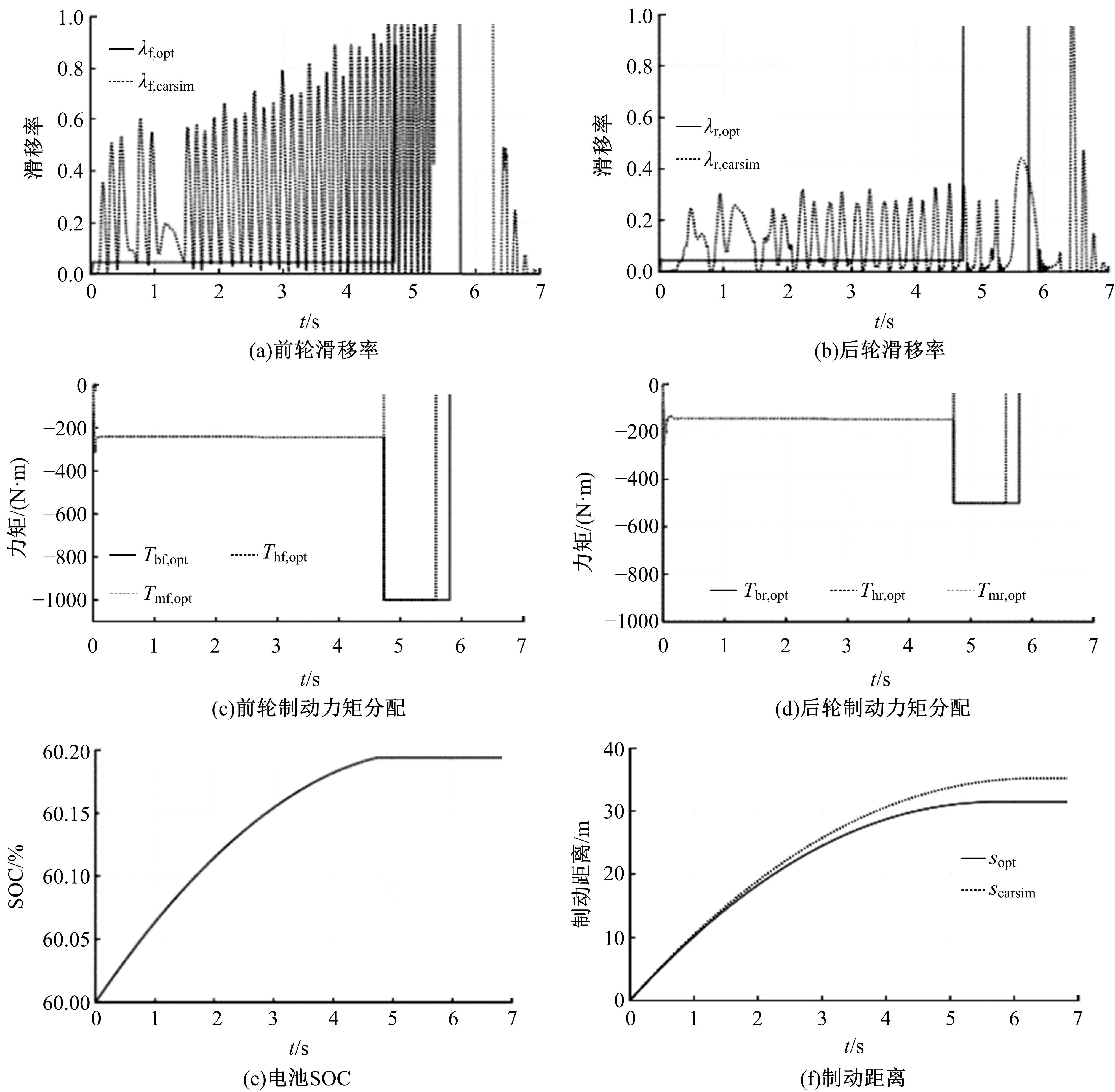
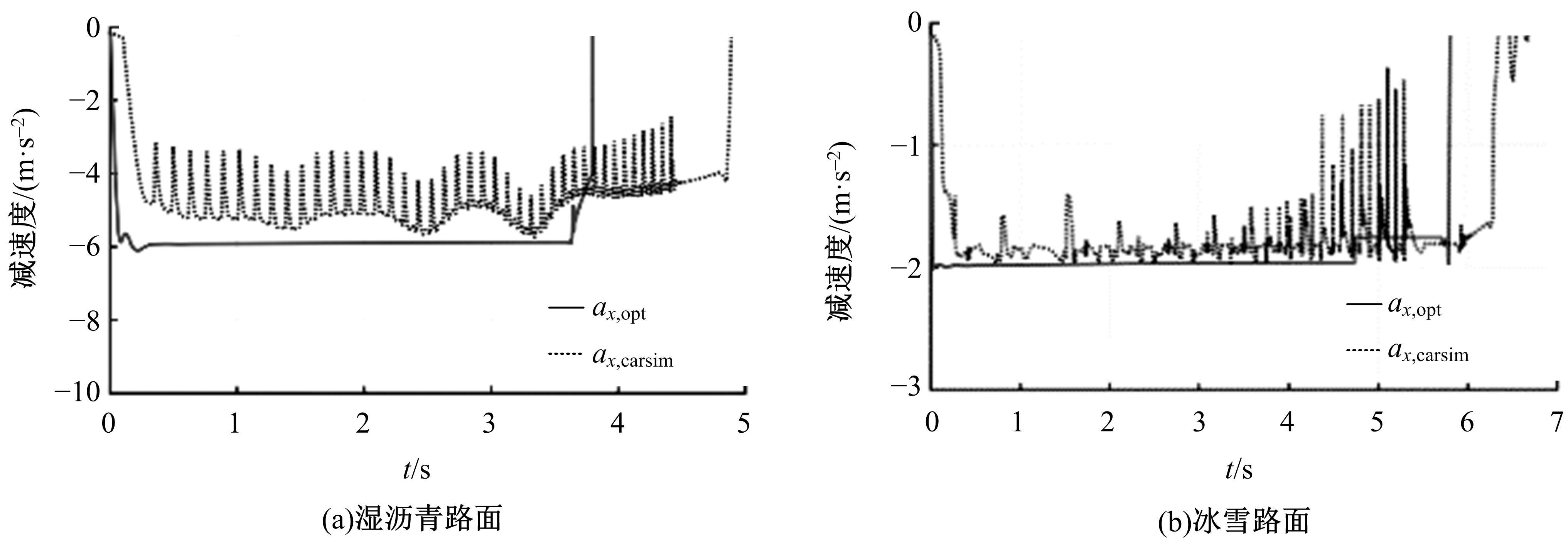
为了解决汽车控制中的安全问题,提高四轮轮毂电动汽车紧急制动时的纵向稳定性,本文提出一种基于模型预测控制的滑移率控制方法。首先,基于扩展卡尔曼滤波的车辆纵向速度估计器对车辆纵向速度进行准确估计,再利用基于限定记忆的递推最小二乘法辨识得到紧急制动工况下车辆的最佳滑移率。其次,上层模型预测控制器跟踪最佳滑移率,在满足安全约束条件下优化求解前后轮在不同路面附着条件下所需的制动力矩,下层转矩分配控制器在电机转矩和电池荷电状态约束条件下分配液压和再生制动力矩,提高能量回收效率。最后,在不同工况下进行仿真实验,实验结果表明本文控制系统能保证紧急制动过程中车辆的安全性和可靠性。
中图分类号:
- TP273





| 1 | 柴凤, 于雁磊, 裴宇龙. 电传动车辆永磁轮毂电机技术现状及展望[J]. 兵工学报, 2021, 42(10): 2060-2074. |
| Chai Feng, Yu Yan-lei, Pei Yu-long. State-of-the-art technology and prospects of permanent magnet in-wheel motors for electric drive vehicles[J]. Acta Armamentarii, 2021, 42(10): 2060-2074. | |
| 2 | Chere J E, Radac M B, Szedlak-Stinean A I. Sliding mode control algorithms for anti-lock braking systems with performance comparisons[J]. Algorithms, 2020, 14(1): No.2. |
| 3 | Dash B K, Subud H B. A fuzzy adaptive sliding mode slip ratio controller of a HEV[C]∥2013 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Hyderabad, India, 2013: 1-8. |
| 4 | Mokarram M, Khoei A, Hadidi K. A fuzzy Anti-lock braking system (ABS) controller using CMOS circuits[J]. Microprocessors and Microsystems, 2019, 70: 47-52. |
| 5 | Zhang J, Kong D, Chen L, et al. Optimization of control strategy for regenerative braking of an electrified bus equipped with an anti-lock braking system[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2012, 226(4): 494-506. |
| 6 | 苑磊, 何仁. 基于线性自抗扰控制的汽车ABS滑移率控制研究[J]. 汽车工程, 2021, 43(9): 1367-1374, 1393. |
| Yuan Lei, He Ren. Research on ABS slip ratio control of vehicle based on linear active disturbance rejection control[J]. Automotive Engineering, 2021, 43(9): 1367-1374, 1393. | |
| 7 | Wang B, Huang X, Wang J, et al. A robust wheel slip ratio control design combining hydraulic and regenerative braking systems for in-wheel-motors-driven electric vehicles[J]. Journal of the Franklin Institute, 2015, 352(2): 577-602. |
| 8 | 郭兆松, 吴士力, 文爱民. 纯电动汽车机电复合制动的模型预测分配策略[J]. 机械设计与制造, 2020(7): 156-160. |
| Guo Zhao-song, Wu Shi-li, Wen Ai-min. Electrical vehicle electro-mechanical hybrid Braking torques distribution strategy based on model predicting control[J]. Machinery Design & Manufacture, 2020(7): 156-160. | |
| 9 | 刘刚, 靳立强, 陈鹏飞. 复杂工况下基于最佳滑移率的汽车牵引力控制算法[J]. 吉林大学学报: 工学版, 2016, 46(5): 1391-1398. |
| Liu Gang, Jin Li-chang, Chen Peng-fei. Vehicle traction control algorithm based on optimal slip ratio under complicated road conditions[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1391-1398. | |
| 10 | Yuan L, Zhao H, Chen H, et al. Nonlinear MPC-based slip control for electric vehicles with vehicle safety constraints[J]. Mechatronics, 2016, 38: 1-15. |
| 11 | 丁辉. 混合动力汽车制动协调及稳定性控制策略研究[D]. 长春: 吉林大学通信工程学院, 2017. |
| Ding Hui. Research on braking coordination and stability control strategy of hybrid electric vehicle[D]. Changchun: College of Communications Engineering, Jilin University, 2017. | |
| 12 | Liang K, Tu Q Z, Xin M, et al. An improved LuGre model for calculating static steering torque of rubber tracked chassis[J]. Defence Technology, 2022, 18(5): 797-810. |
| 13 | Zhang J, Sun W, Jing H. Nonlinear robust control of antilock braking systems assisted by active suspensions for automobile[J]. IEEE Transactions on Control Systems Technology, 2018, 27(3): 1352-1359. |
| 14 | Khodaparast J, Khederzadeh M. Least square and kalman based methods for dynamic phasor estimation: a review[J]. Protection and Control of Modern Power Systems, 2017, 2(1): 1-18. |
| [1] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [2] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [3] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [4] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [5] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [6] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [7] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [8] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [9] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [10] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [11] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [12] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [13] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [14] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [15] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
|
||