吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (12): 3729-3739.doi: 10.13229/j.cnki.jdxbgxb.20230175
无人驾驶汽车变速换道轨迹跟踪动态控制
刘刚1( ),范群1,杨旭2,任宏斌3
),范群1,杨旭2,任宏斌3
- 1.沈阳航空航天大学 机电工程学院,沈阳 110136
2.辽宁陆平机器股份有限公司,辽宁 铁岭 112001
3.北京理工大学 机械与车辆学院,北京 100081
Dynamic control for trajectory tracking of variable speed lane change in autonomous vehicles
Gang LIU1(),Qun FAN1,Xu YANG2,Hong-bin REN3
- 1.School of Mechatronics Engineering,Shenyang Aerospace University,Shenyang 110136,China
2.Liaoning Luping Machinery Co. ,Ltd. ,Tieling 112001,China
3.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China
摘要:
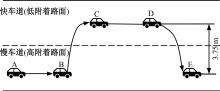
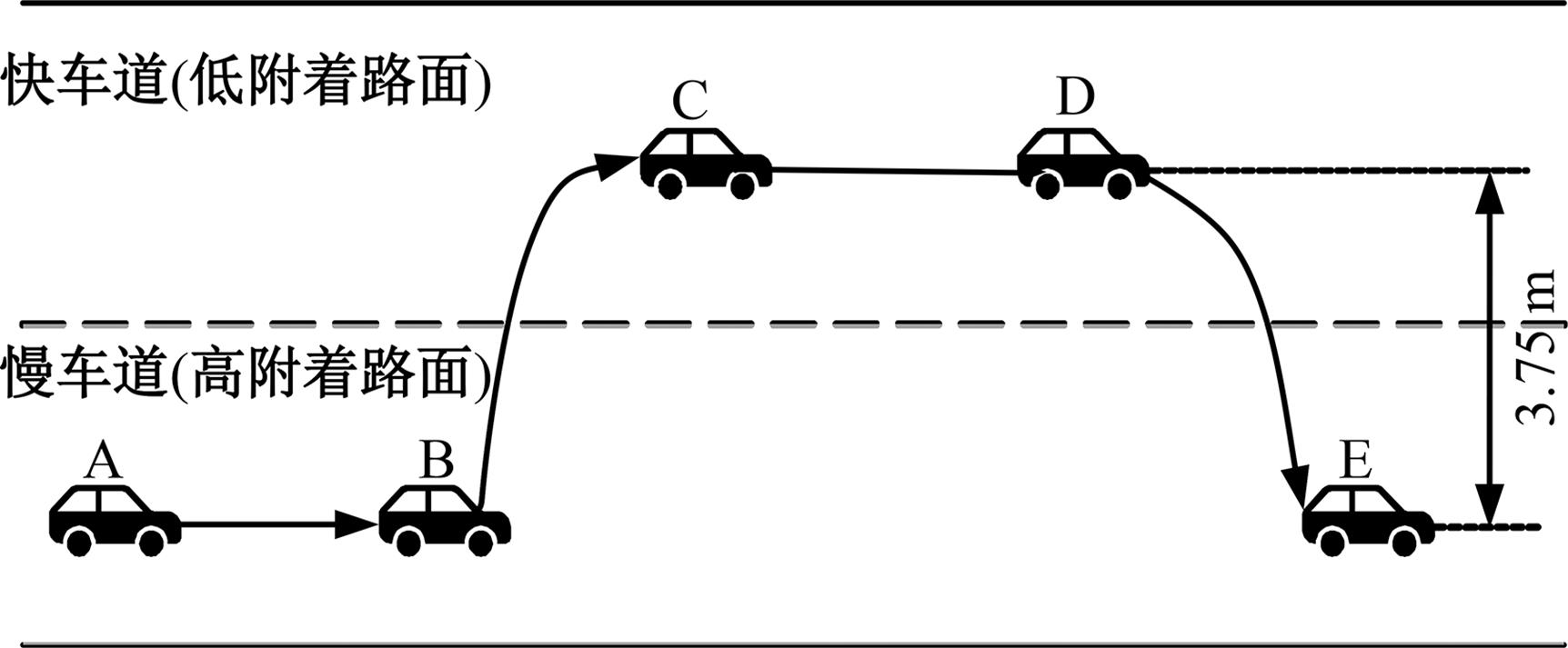
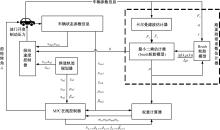
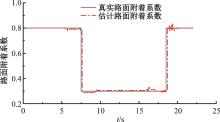
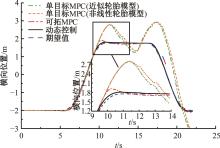
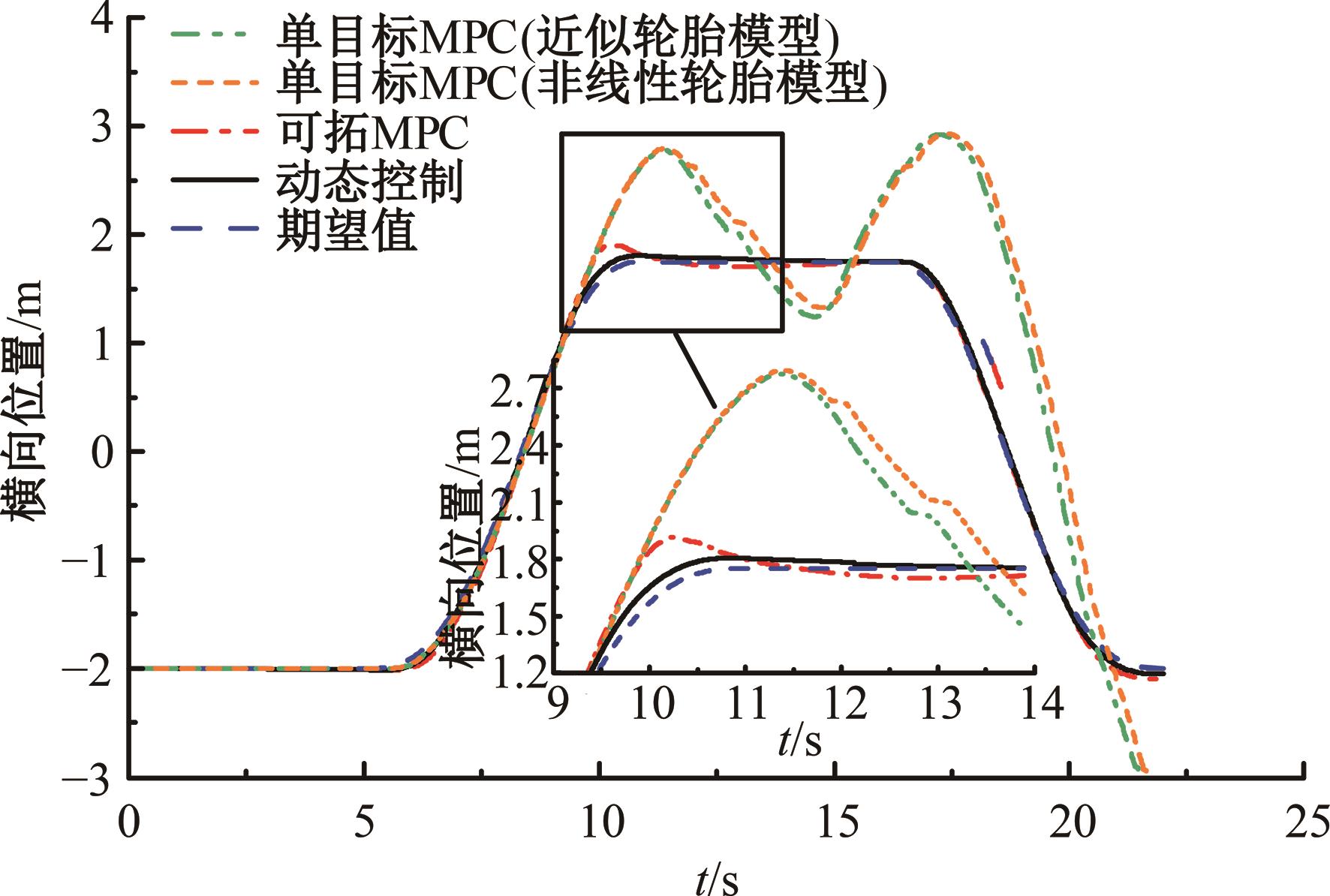
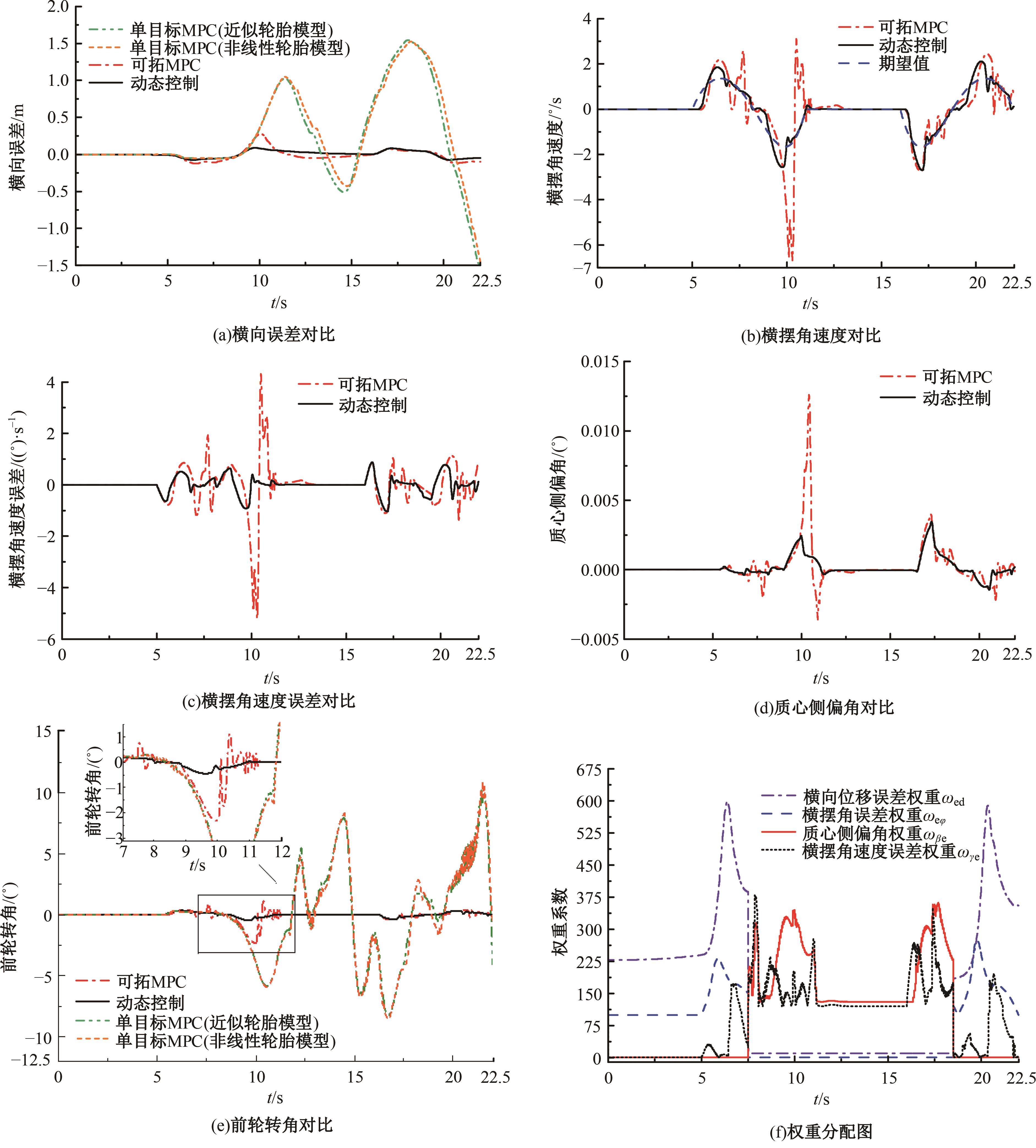
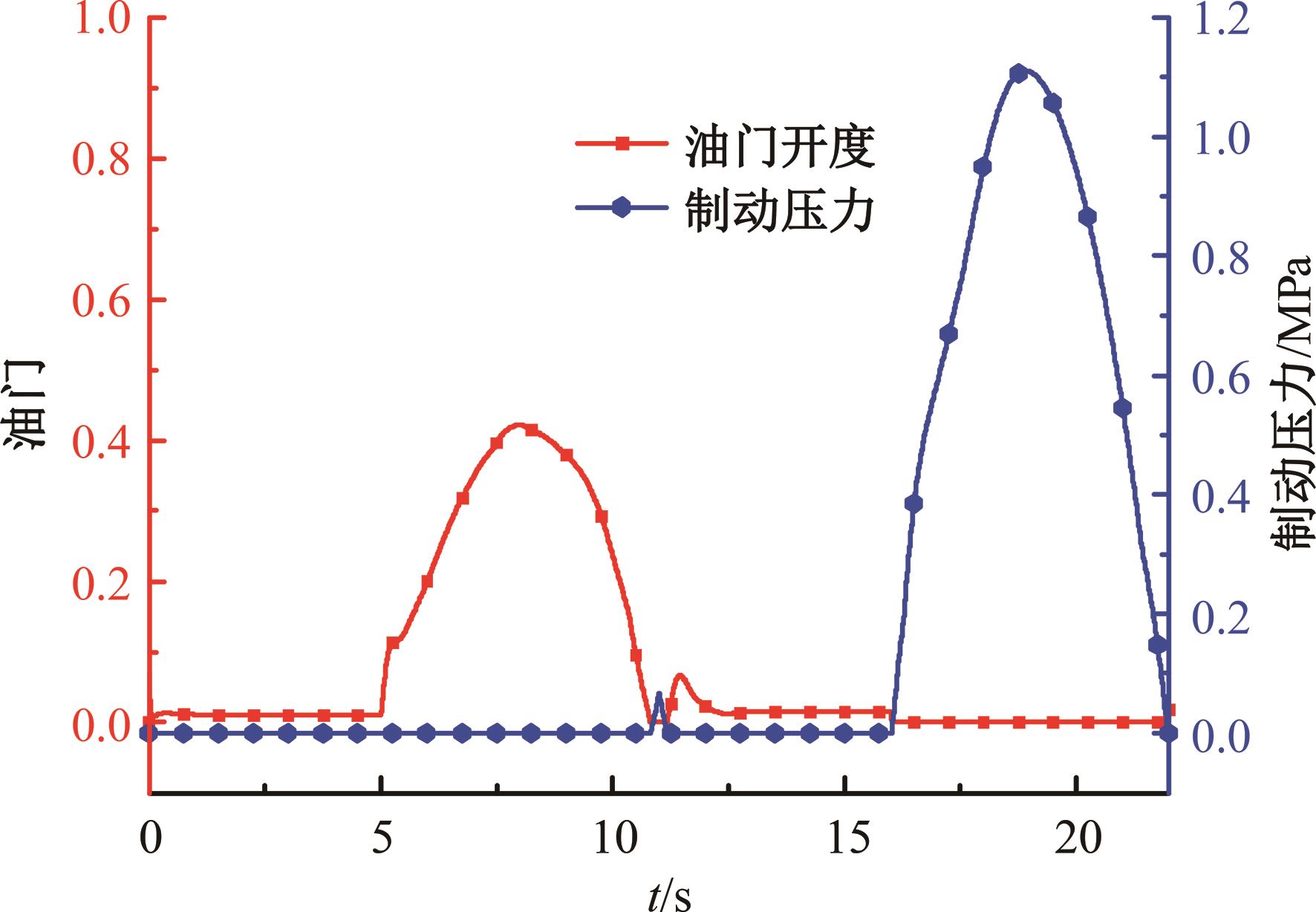
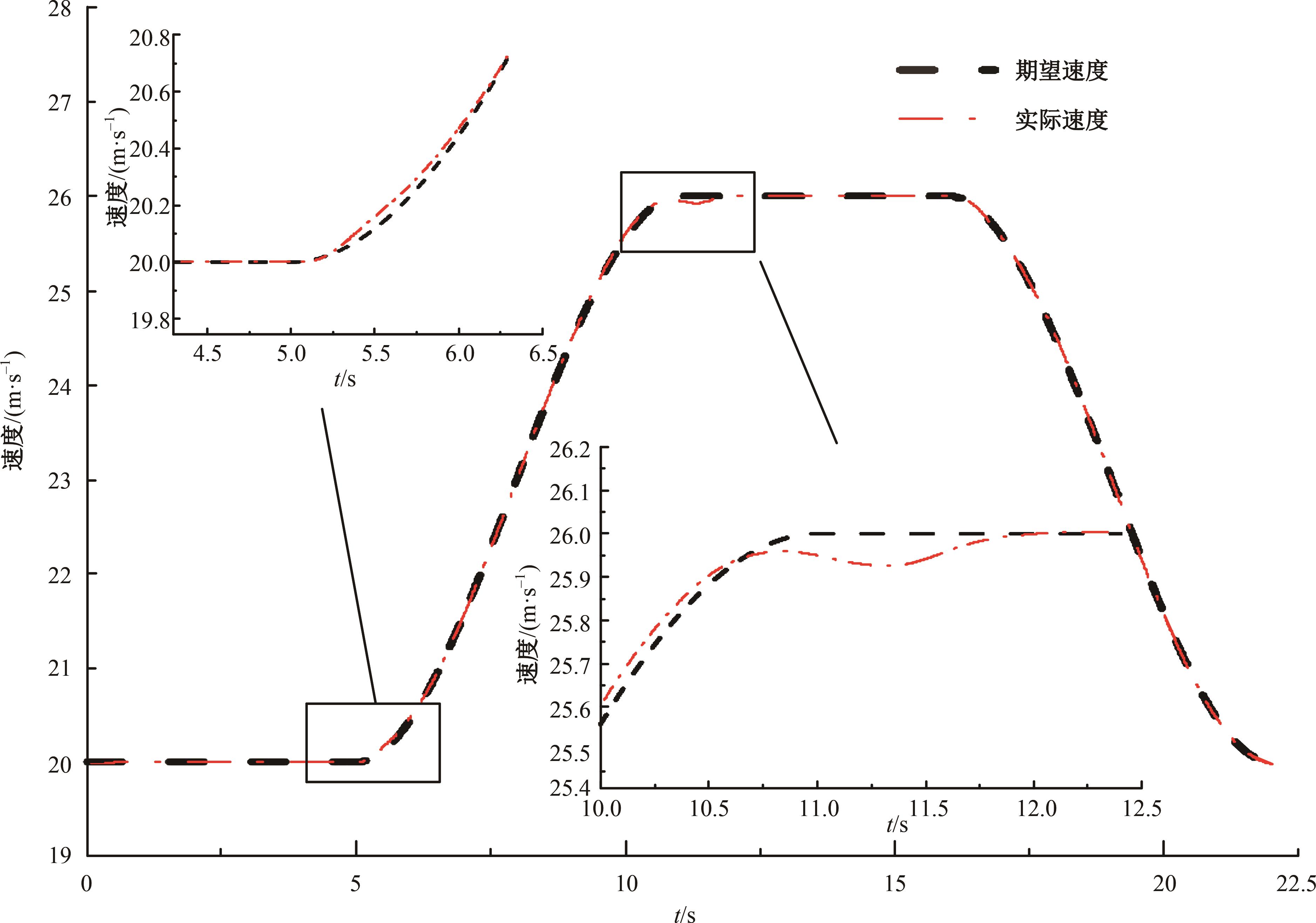
提出了一种变速换道轨迹跟踪动态控制策略,针对变速换道轨迹构建了双PID纵向速度控制器和以横向误差、横摆角速度和质心侧偏角为综合评价指标的模型预测横向控制器,该动态控制算法利用估计得到的路面附着系数和预测的车辆状态信息自动调整算法中各个评价指标的权重系数,实现轨迹跟踪精度和横向稳定性之间的动态控制。据此设计高低附着对开路面的变速换道工况,利用CarSim与Simulink联合仿真对比验证算法的有效性。仿真结果表明:本文提出的动态控制策略实现了不同路面附着系数下的权重因子动态调节,在变速换道时仍可以确保控制量平滑输出,同步提升了无人驾驶汽车轨迹跟踪控制精度和横向稳定性,具有良好的协调控制效果。
中图分类号:
- U463.6

| 1 | Claussmann L, Revilloud M, Gruyer D, et al. A revi-ew of motion planning for highway autonomous driv-ing[J]. IEEE Transactions on Intelligent TransportationSystems,2019,21(5):1826-1848. |
| 2 | 陈磊,王杨,董志圣,等.一种基于转向意图的车辆敏捷性控制策略[J].吉林大学学报:工学版,2023,53(5):1257-1263. |
| Chen Lei, Wang Yang, Dong Zhi-sheng, et al. A vehicle agility control strategy based on steering intention[J]. Journal of Jilin University (Engineering and Technology Edition),2023,53(5):1257-1263. | |
| 3 | 徐明泽,刘清河.基于LQR和PID的智能车轨迹跟踪控制算法设计与仿真[J].太原理工大学学报,2022,53(5):877-885. |
| Xu Ming-ze, Liu Qing-he. Design and simulation of intelligent vehicle trajectory tracking control algorithm based on LQR and PID[J]. Journal of Taiyuan University of Technology,2022,53(5):877-885. | |
| 4 | Pan R Y, Jie L H, Zhao X Y, et al. Active obstacle avoidance trajectory planning for vehicles based on obstacle potential field and MPC in V2P scenario[J]. Sensors,2023,23(6):No.23063248. |
| 5 | Cui Q J, Ding R J, Wei C F, et al. Path-tracking and lateral stabilisation for autonomous vehicles by using the steering angle envelope[J]. Vehicle System Dynamics,2020,59(11/12):1672-1696. |
| 6 | He D F, Peng B B. Gaussian learning-based fuzzy predictive cruise control for improving safety and economy of connected vehicles[J]. IET Intelligent Transport Systems,2020,14(5):346-355. |
| 7 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程,2019,41(10):1109-1116. |
| Chen Te, Chen Long, Xu Xing, et al. Distributed drive unmanned vehicle path tracking and stability of coordinate control[J]. Journal of Automobile Engineering, 2019,41(10):1109-1116. | |
| 8 | 李韶华,杨泽坤,王雪玮.基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J].机械工程学报,2023,59(4):199-212. |
| Li Shao-hua, Yang Ze-kun, Wang Xue-wei. Intelligent vehicle trajectory tracking control based on T-S fuzzy variable weight MPC[J]. Journal of Mechanical Engineering,2023,59(4):199-212. | |
| 9 | Li B, Ouyang Y K, Li L, et al. Autonomous dr-iving on curvy roads without reliance on frenet frame:a cartesian-based trajectory planning method[J]. IEEE Transactions on Intelligent Transportation Systems,2022,23(9):15729-15741. |
| 10 | 孟繁瑞, 王翔, 俄文娟, 等. 基于GCN-CS-LSTM的车辆多模态行驶轨迹预测[J]. 江苏大学学报: 自然科学版, 2024, 45(5): 506-512. |
| Meng Fan-rui, Wang Xiang, Wen-juan E,et al. Multi-modal trajectory prediction of vehicles based on GCN-CS-LSTM[J]. Journal of Jiangsu University (Natural Science Edition), 2024, 45(5): 506-512 | |
| 11 | 王其东,刘伟,陈无畏,等.基于路面识别的汽车稳定系统滑模控制[J].汽车工程, 2018,40(1):82-90, 106. |
| Wang Qi-dong, Liu Wei, Chen Wu-wei, et al. Slidingmode control of vehicle stability system based on ro-ad recognition[J]. Automotive Engineering,2018,40(1):82-90, 106. | |
| 12 | 牛国臣,李文帅.基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986, 1004. |
| Niu Guo-chen, Li Wen-shuai. Smart car based on double five times polynomial lane changing trajectory planning[J]. Journal of Automobile Engineering,2021,43(7):978-986, 1004. | |
| 13 | 张志勇,龙凯,杜荣华,等.自动驾驶汽车高速超车轨迹跟踪协调控制[J].汽车工程,2021,43(7):995-1004. |
| Zhang Zhi-yong, Long Kai, Du Rong-hua, et al. High-speed automatic driving a car overtaking trajectory tracking coordination control[J]. Journal of Automobile Engineering, 2021,43(7):995-1004. | |
| 14 | Zhang X Y, Wang P, Lin J M, et al. Real-time nonlinear predictive controller design for drive-by-wire vehicle lateral stability with dynamic boundary conditions[J]. Fundamental Research,2022,2(1):131-143. |
| [1] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [2] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [3] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [4] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [5] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [6] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [7] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [8] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [9] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [10] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [11] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [12] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [13] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [14] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [15] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
|