吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (10): 3200-3207.doi: 10.13229/j.cnki.jdxbgxb.20240383
• 交通运输工程·土木工程 • 上一篇
考虑临界密度的道路网络混合交通流级联失效
路庆昌( ),任永全,李静,孟旭,徐鹏程
),任永全,李静,孟旭,徐鹏程
- 长安大学 电子与控制工程学院,西安 710064
Cascading failures of mixed traffic flows in road networks considering critical density
Qing-chang LU(),Yong-quan REN,Jing LI,Xu MENG,Peng-cheng XU
- School of Electronics and Control Engineering,Chang'an University,Xi'an 710064,China
摘要:
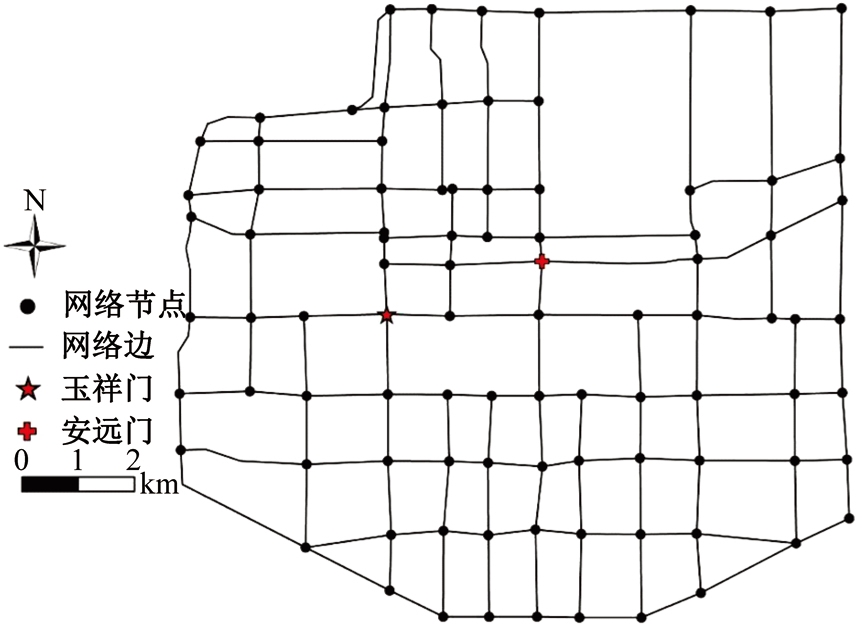
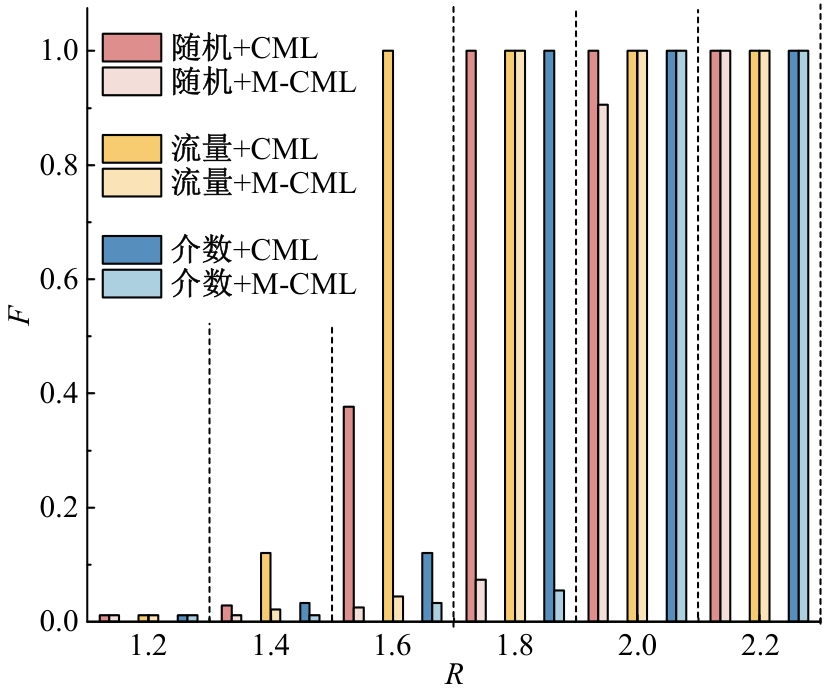
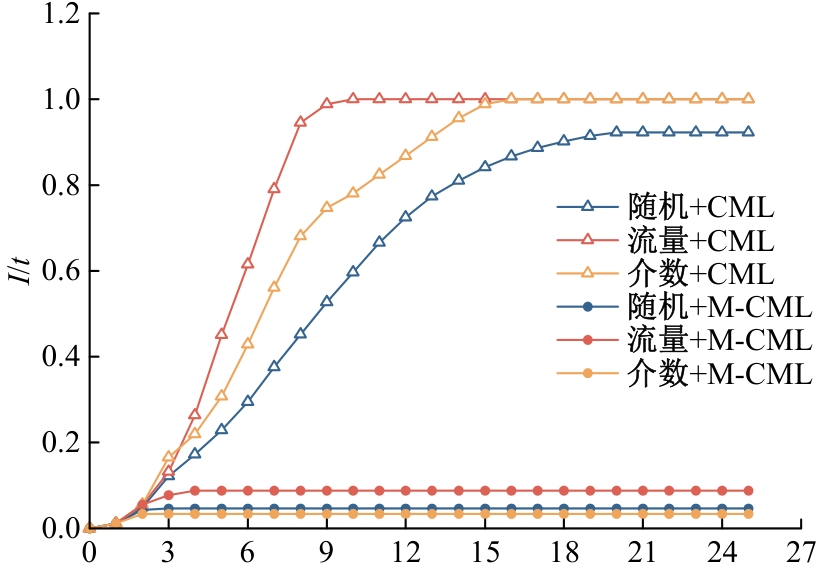
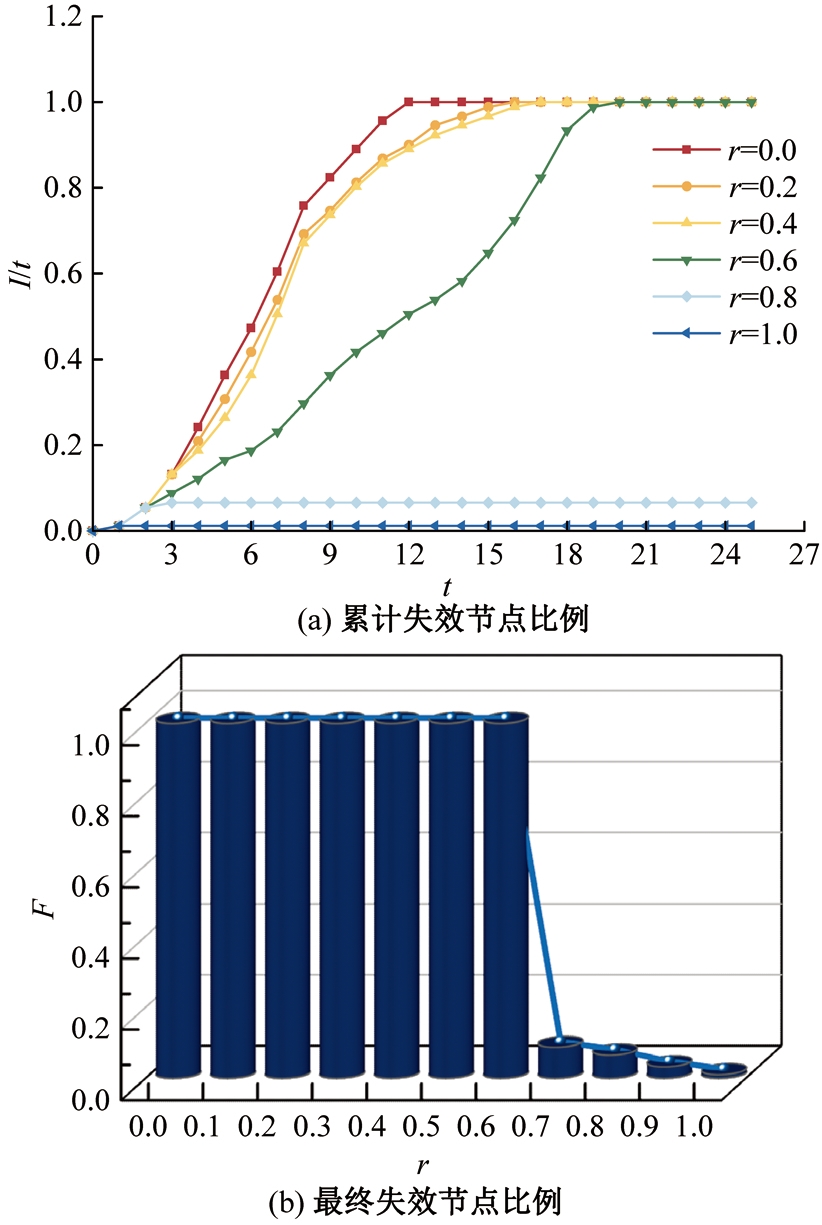
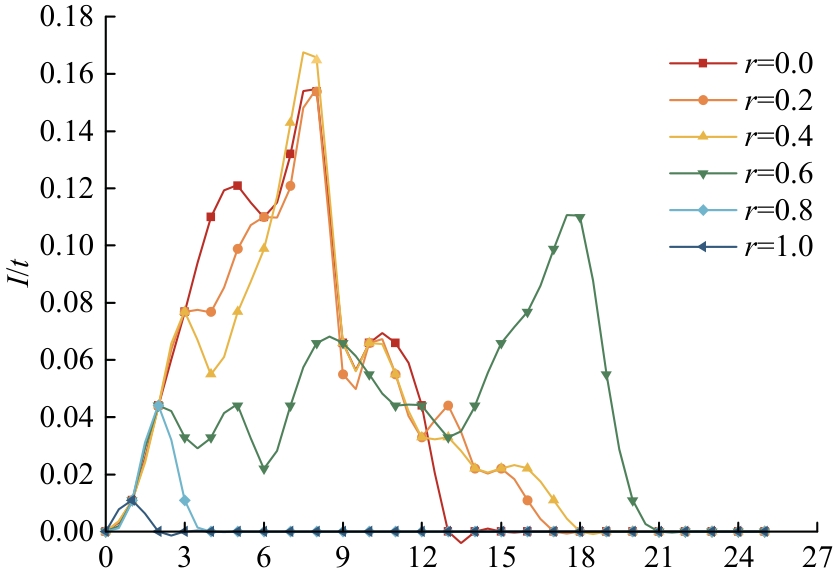
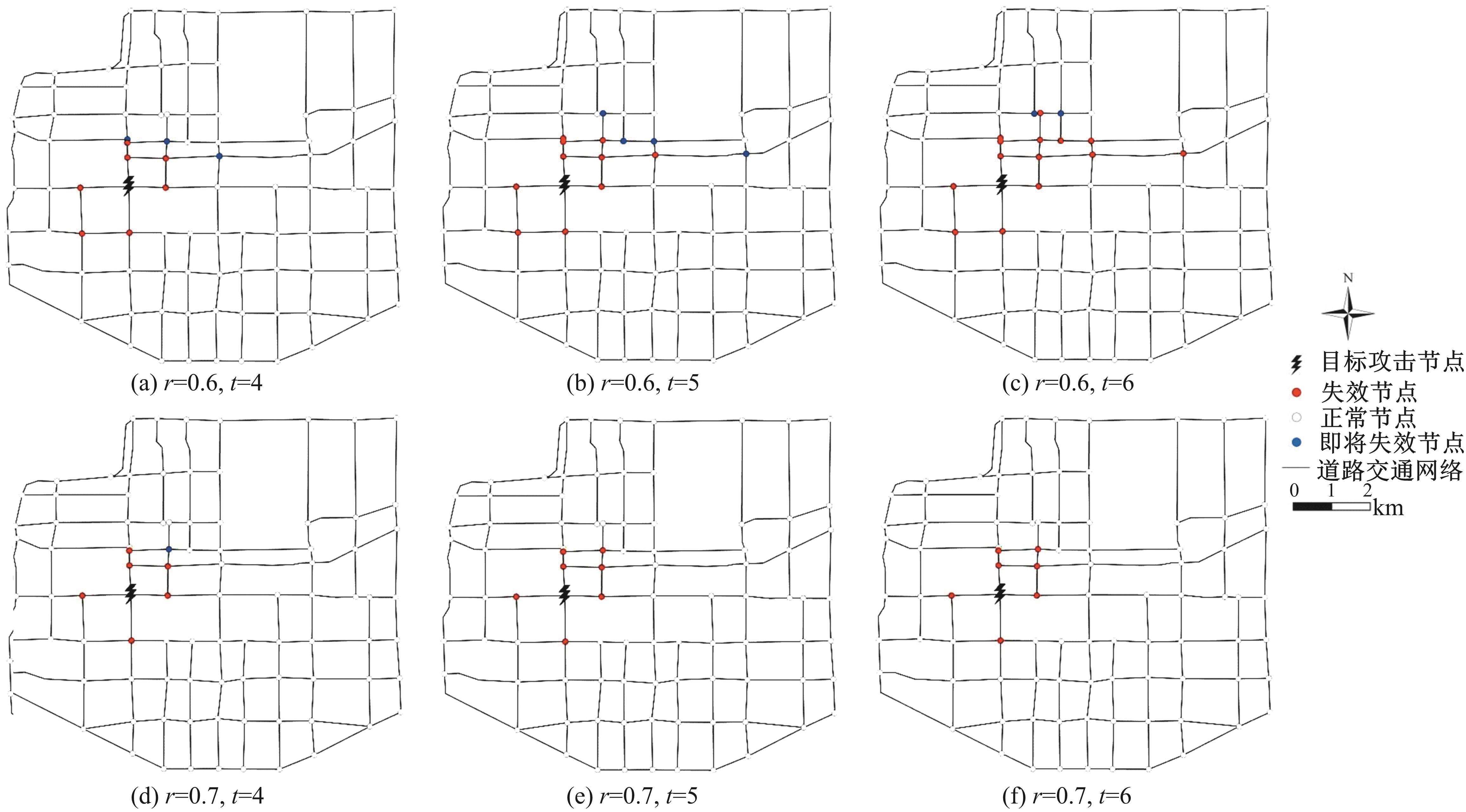
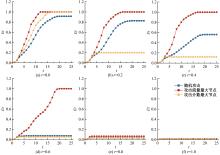
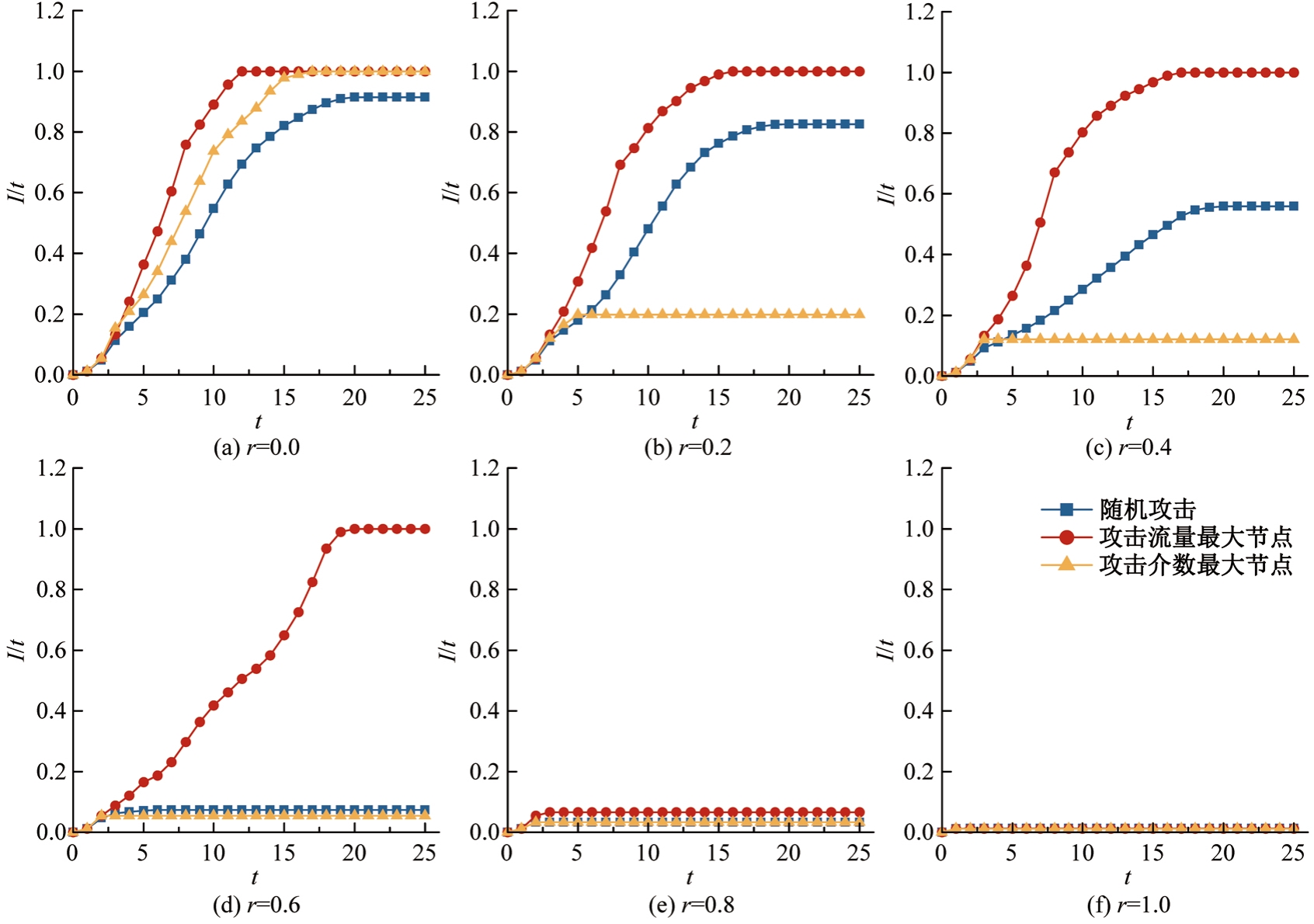
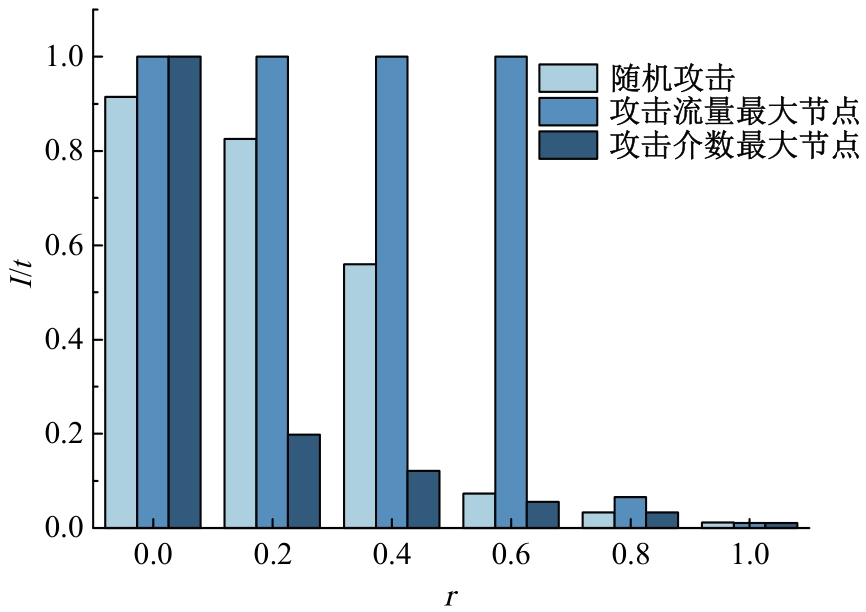
为探究网联自动驾驶车辆(Connected automated vehicle,CAV)引入后道路网络级联失效机理,建立了考虑新型混合交通流道路临界密度的路网级联失效模型。该方法考虑失效后流量重分配的方式,并捕捉混合交通流对道路抵抗拥堵能力的影响。本文以西安市城市道路网络为例,研究了混合交通流级联失效的规律特征。结果表明:CAV渗透率达到0.6(临界值)时,最外层节点开始抵御失效,级联失效的传播速度会显著放缓;渗透率超过0.6后,最外层节点成功抵御失效,失效总规模下降91%左右;攻击流量最大节点时的失效传播速度最快且规模最大,管控流量最大节点是级联失效管控的重点。
中图分类号:
- U491.2

| [1] | 北京交通发展研究院. 2023年北京交通发展年度报告[R]. 北京: 北京交通发展研究院, 2023. |
| [2] | Reddy V H P, Raja A R, Polasi P K, et al. Design and development of traffic light recognition method for autonomous vehicles using V2I communication[C]∥The 3rd International Conference on Artificial Intelligence and Signal Processing(AISP), Vijayawada, India,2023: 1-6. |
| [3] | Gong Y, Zhu W. Modeling the heterogeneous traffic flow considering the effect of self-stabilizing and autonomous vehicles[J]. Chinese Physics B, 2022, 31(2): No.024502. |
| [4] | Lu Q, Zhang L, Xu P, et al. Modeling network vulnerability of urban rail transit under cascading failures: a coupled map lattices approach[J]. Reliability Engineering & System Safety, 2022, 221: No. 108320. |
| [5] | Zhang J, Wang Z, Wang S, et al. Vulnerability assessments of weighted urban rail transit networks with integrated coupled map lattices[J]. Reliability Engineering & System Safety, 2021, 214: No.107707. |
| [6] | Shen Y, Ren G, Ran B. Analysis of cascading failure induced by load fluctuation and robust station capacity assignment for metros[J]. Transportmetrica A: Transport Science, 2022, 18(3): 1401-1419. |
| [7] | Mikaberidze G, D´Souza R M. Sandpile cascades on oscillator networks: the BTW model meets Kuramoto[J]. Chaos: an Interdisciplinary Journal of Nonlinear Science, 2022, 32(5): No.053121. |
| [8] | Mei S, He F, Zhang X, et al. An improved OPA model and blackout risk assessment[J]. IEEE Transactions on Power Systems, 2009, 24(2): 814-823. |
| [9] | Elawady A, Abuzwidah M, Zeiada W. The benefits of using connected vehicles system on traffic delay and safety at urban signalized intersections[C]∥Advances in Science and Engineering Technology International Conferences (ASET), Dubai, UAE,2022: 1-6. |
| [10] | Wu Y, Lin Y, Hu R, et al. Modeling and simulation of traffic congestion for mixed traffic flow with connected automated vehicles: a cell transmission model approach[J]. Journal of Advanced Transportation, 2022, 2022(1):1-20. |
| [11] | 马庆禄, 牛圣平, 曾皓威, 等. 网联环境下混合交通流偶发拥堵演化机理研究[J]. 交通运输系统工程与信息, 2022, 22(5): 97-106. |
| Ma Qing-lu, Niu Sheng-ping, Zeng Hao-wei, et al. Mechanism of non-recurring congestion evolution under mixed traffic flow with connected and autonomous vehicles[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(5): 97-106. | |
| [12] | 石路源. 基于手自混合驾驶的道路网络级联失效演变[D]. 重庆: 重庆交通大学交通运输学院, 2020. |
| Shi Lu-yuan. Cascade failure evolution of road network based on manual and autonomous mixed driving[D]. Chongqing: College of Traffic and Transportation,Chongqing Jiaotong University, 2020. | |
| [13] | Zhou Z, Li L, Qu X, et al. An autonomous platoon formation strategy to optimize CAV car-following stability under periodic disturbance[J]. Physica A: Statistical Mechanics and its Applications, 2023, 626:No. 129096. |
| [14] | Chen B, Sun D, Zhou J, et al. A future intelligent traffic system with mixed autonomous vehicles and human-driven vehicles[J]. Information Sciences, 2020, 529: 59-72. |
| [15] | Kaneko K. Overview of coupled map lattices[J]. Chaos: an Interdisciplinary Journal of Nonlinear Science, 1992, 2(3): 279-282. |
| [16] | 王秋玲, 朱璋元, 陈红, 等. 基于CML的级联失效下异质多层交通网络节点抵抗特性研究[J]. 中国公路学报, 2022, 35(1): 263-274. |
| Wang Qiu-ling, Zhu Zhang-yuan, Chen Hong, et al. Node resistance characteristic of heterogeneous multi-layer transportation networks under cascading failure based on coupled map lattice[J]. China Journal of Highway and Transport, 2022, 35(1): 263-274. | |
| [17] | Xu K, Hong C, Zhang X, et al. Cascades in coupled map lattices with heterogeneous distribution of perturbations[J]. Physica a: Statistical Mechanics and its Applications, 2020, 547: No.123839. |
| [18] | Sun D, Jiang T, Zhao H, et al. Quantitative studies on traffic efficiency and safety variation trend of mixed traffic flow with different penetration rates of automated vehicles[C]∥The 2nd International Conference on Sustainable Energy, Environment and Information Engineering,Xi'an, China,2020. |
| [19] | 张磊. 基于级联失效的城市轨道交通网络脆弱性研究 [D]. 西安: 长安大学电子与控制工程学院, 2022. |
| Zhang Lei. Research on network vulnerability of urban rail transit based on cascading failures[D]. Xi´an: College of Electronics and Control Engineering, Chang´an University, 2022. |
| [1] | 吴德华,陈荣峰. 智能网联客货混合交通流特性及集聚换道策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2588-2596. |
| [2] | 王健,贾晨威. 面向智能网联车辆的轨迹预测模型[J]. 吉林大学学报(工学版), 2025, 55(6): 1963-1972. |
| [3] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [4] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [5] | 金盛,李博林,薛炜. 智能网联车借用公交专用道的轨迹与信号协同优化[J]. 吉林大学学报(工学版), 2025, 55(2): 566-576. |
| [6] | 陈发城,鲁光泉,林庆峰,张浩东,马社强,刘德志,宋会军. 有条件自动驾驶下驾驶人接管行为综述[J]. 吉林大学学报(工学版), 2025, 55(2): 419-433. |
| [7] | 朱冰,范天昕,赵文博,李伟男,张培兴. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报(工学版), 2025, 55(2): 456-467. |
| [8] | 王祥,谭国真,彭衍飞,任浩,李健平. 基于语言推理和认知记忆的自动驾驶决策模型[J]. 吉林大学学报(工学版), 2025, 55(12): 3918-3927. |
| [9] | 杨柳,李鸿辉,李文芳. 考虑自动驾驶小客车的高速公路施工区上游过渡区间距[J]. 吉林大学学报(工学版), 2025, 55(11): 3604-3613. |
| [10] | 胡伟超,杨镇铭,于鹏程,陈艳艳,马社强. 基于深度强化学习的自动驾驶车辆与行人交互建模[J]. 吉林大学学报(工学版), 2025, 55(10): 3180-3188. |
| [11] | 罗玉涛,薛志成. 基于环境表征的强化学习自动驾驶策略[J]. 吉林大学学报(工学版), 2025, 55(10): 3169-3179. |
| [12] | 王长帅,徐铖铖,任卫林,彭畅,佟昊. 自动驾驶接管过程中驾驶能力恢复状态对交通流振荡特性的影响[J]. 吉林大学学报(工学版), 2025, 55(1): 150-161. |
| [13] | 郑长江,陶童统,陈志超. 基于流量可调重分配的级联失效模型[J]. 吉林大学学报(工学版), 2024, 54(9): 2441-2450. |
| [14] | 涂辉招,鹿畅,陆淼嘉,李浩. 基于避险脱离的自动驾驶路测安全影响因素[J]. 吉林大学学报(工学版), 2024, 54(7): 1935-1943. |
| [15] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
|
||