Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (6): 1788-1795.doi: 10.13229/j.cnki.jdxbgxb.20220882
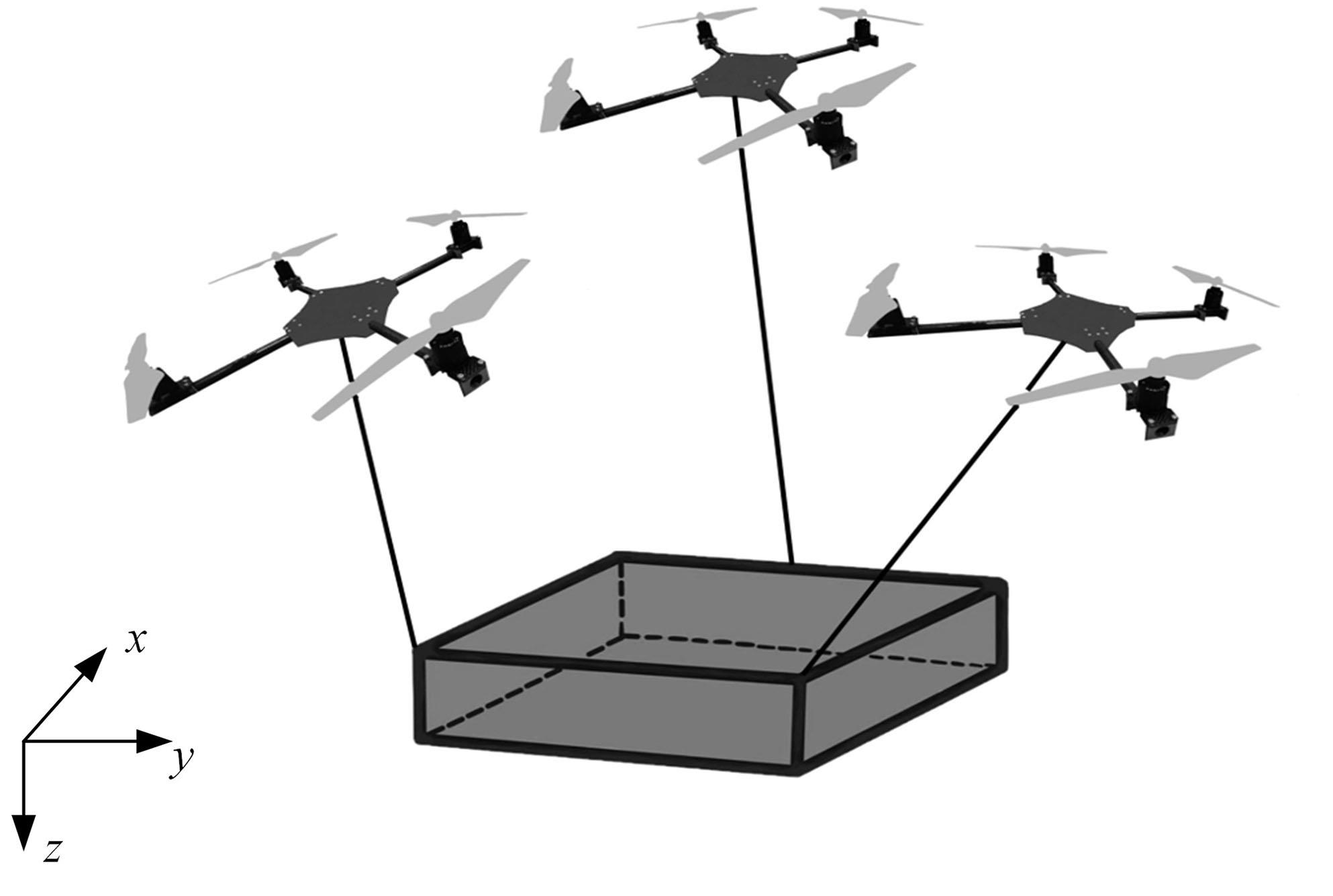
Nonlinear robust control design for multi unmanned aerial vehicles suspended payload transportation system
Bin XIAN( ),Guang-yi WANG,Jia-ming CAI
),Guang-yi WANG,Jia-ming CAI
- School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
CLC Number:
- TP273





| 1 | Gao J, Zhang F, Huang P, et al. Observer-based second order sliding mode control for tethered quadrotor transportation[C]∥2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xi'ning, China, 2021: 1335-1342. |
| 2 | Pizetta I H B, Brandão A S, Sarcinelli-Filho M. Cooperative load transportation using three quadrotors[C]∥2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 2019: 644-650. |
| 3 | Mofid O, Mobayen S, Fekih A. Adaptive integral-type terminal sliding mode control for unmanned aerial vehicle under model uncertainties and external disturbances[J]. IEEE Access, 2021, 9: 53255-53265. |
| 4 | Xian B, Dawson D M, de Queiroz M S, et al. A continuous asymptotic tracking control strategy for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2004, 49(7): 1206-1211. |
| 5 | Gu X, Xian B, Wang Y. Agile flight for a quadrotor via robust geometry control: theory and experimental verification[J]. International Journal of Robust and Nonlinear Control, 2022, 32(7): 4236-4250. |
| 6 | 鲜斌, 李宏图. 分布式多无人机的时变编队非线性控制设计[J]. 控制与决策, 2021, 36(10): 2490-2496. |
| Xian Bin, Li Hong-tu. Time-varying formation nonlinear control of distributed multiple UAVs[J]. Control and Decision, 2021, 36(10): 2490-2496. | |
| 7 | Xian B, Yang S. Robust tracking control of a quadrotor unmanned aerial vehicle-suspended payload system[J]. IEEE/ASME Transactions on Mechatronics, 2020, 26(5): 2653-2663. |
| 8 | 鲜斌, 张诗婧, 韩晓薇, 等. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报: 工学版, 2021, 51(6): 2259-2267. |
| Xian Bin, Zhang Shi-jing, Han Xiao-wei, et al. Trajectory planning for the unmanned aerial vehicle (UAV) slung-payload aerial transportation system based on reinforcement learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2259-2267. | |
| 9 | Shirani B, Najafi M, Izadi I. Cooperative load transportation using multiple UAVs[J]. Aerospace Science and Technology, 2019, 84: 158-169. |
| 10 | Li X, Zhang J, Han J. Trajectory planning of load transportation with multi-quadrotors based on reinforcement learning algorithm[J]. Aerospace Science and Technology, 2021, 116: No.106887. |
| 11 | 梁潇, 王杨, 何慰, 等. 基于能量分析的欠驱动飞行吊运系统协同控制[J]. 控制理论与应用, 2020, 37(12): 2473-2481. |
| Liang Xiao, Wang Yang, He Wei, et al. Cooperative control for underactuated aerial transportation systems via the energy-based analysis[J]. Control Theory & Applications, 2020, 37(12): 2473-2481. | |
| 12 | Sreenath K, Lee T, Kumar V. Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load[C]∥52nd IEEE Conference on Decision and Control, Firenze, Italy, 2013: 2269-2274. |
| 13 | Lee T. Geometric control of quadrotor UAVs transporting a cable-suspended rigid body[J]. IEEE Transactions on Control Systems Technology, 2017, 26(1): 255-264. |
| 14 | Sanalitro D, Savino H J, Tognon M, et al. Full-pose manipulation control of a cable-suspended load with multiple UAVs under uncertainties[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2185-2191. |
| 15 | Fernando T, Chandiramani J, Lee T, et al. Robust adaptive geometric tracking controls on SO (3) with an application to the attitude dynamics of a quadrotor UAV[C]∥2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 2011: 7380-7385. |
| [1] | Hong-zhi WANG,Ting-ting WANG,Miao-miao LAN,Shuo XU. A novel sliding mode control strategy of multi-motor for robot arm based on position tracking [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1443-1458. |
| [2] | Jun ZHAO,Zi-liang ZHAO,Qing-lin ZHU,Bin GUO. Output⁃feedback robust control of uncertain systems without observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 828-835. |
| [3] | Guo-yuan QI,Hao CHEN. Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 810-822. |
| [4] | Long-long CHEN,Tian-yu FENG,Zong-yang LYU,Yu-hu WU. Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 883-890. |
| [5] | Guo-yuan QI,Kuo LI,Kun WANG. Attitude constrained control of quadrotor unmanned aerial vehicle based on compensation function observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 853-862. |
| [6] | Hong-yan GUO,Wen-ya YU,Jun LIU,Qi-kun DAI. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 693-703. |
| [7] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [8] | Zhuo-jun XU,Yao-xiang WANG,Xing HUANG,Cheng PENG. Ground moving target search and location with multi⁃unmanned aerial vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 832-840. |
| [9] | De-feng HE,Dan ZHOU,Jie LUO. Efficient cooperative predictive control of predecessor⁃following vehicle platoons with guaranteed string stability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 726-734. |
| [10] | Yan MA,Ze-xuan GUO. SoE estimation of lithium-ion batteries based on improved BPNN-MPF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 263-272. |
| [11] | Xiao-dong SUN,Yao ZHANG,Long CHEN. Deadbeat predictive voltage compensation control for permanent magnet synchronous hub motors of electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2213-2224. |
| [12] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
| [13] | Hong-zhi WANG,Ting-ting WANG,Huang-shui HU,Xiao-fan LU. PID control based on BP neural network optimized by Q⁃learning for speed control of BLDCM [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2280-2286. |
| [14] | Yan MA,Jian-fei HUANG,Hai-yan ZHAO. Method of vehicle formation control based on vehicle to vehicle communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 711-718. |
| [15] | HE Xiang-kun, JI Xue-wu, YANG Kai-ming, WU Jian, LIU Ya-hui. Tire slip control based on integrated-electro-hydraulic braking system [J]. 吉林大学学报(工学版), 2018, 48(2): 364-372. |
|
||