Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (7): 1687-1695.doi: 10.13229/j.cnki.jdxbgxb20210120
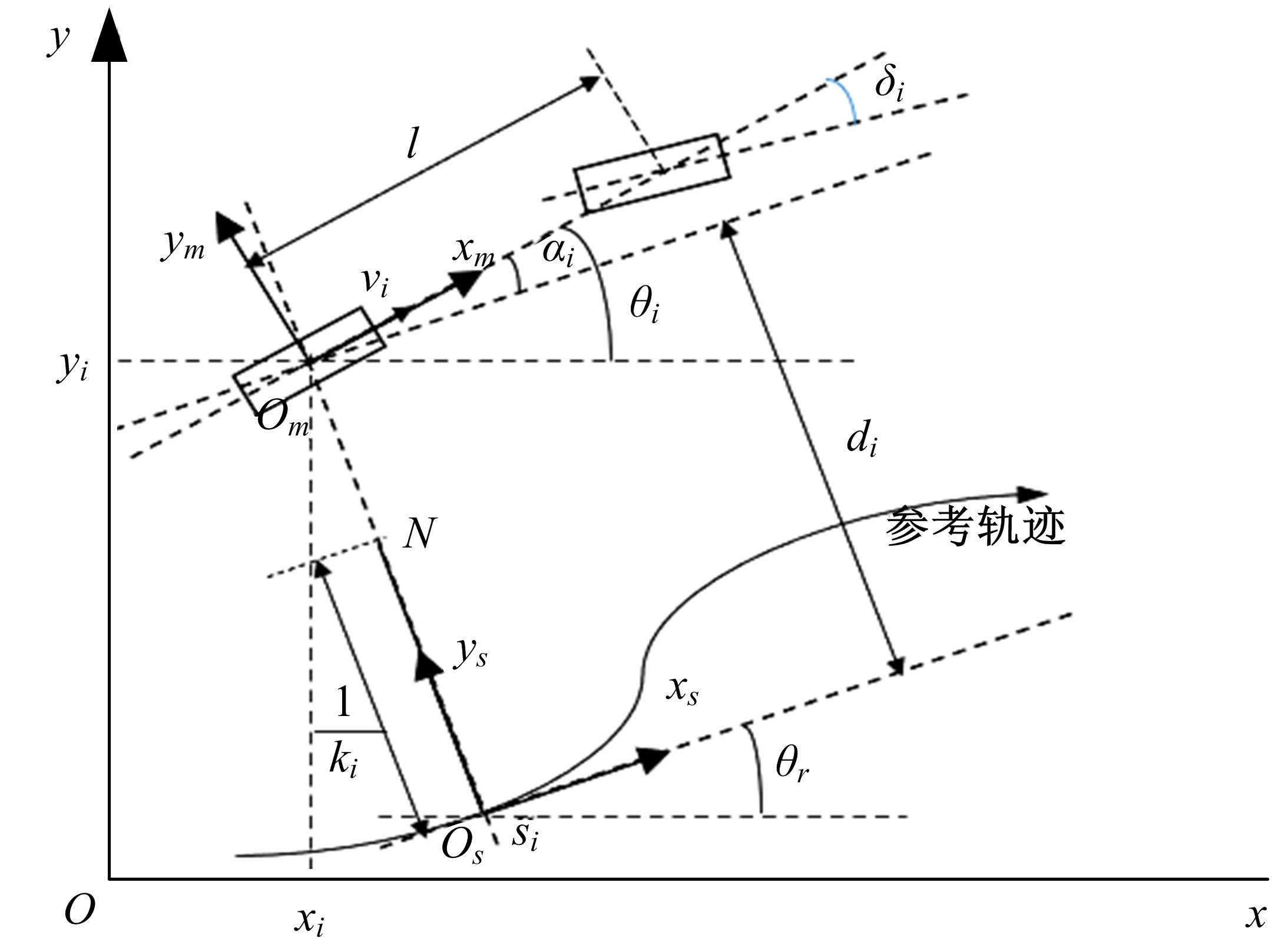
Design of cooperative adaptive cruise control algorithm based on Frenet framework
Guang-ming NIE1( ),Bo XIE1,Yan-tao TIAN1,2()
),Bo XIE1,Yan-tao TIAN1,2()
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.Key Laboratory of Bionic Engineering,Ministry of Education,Jilin University,Changchun 130022,China
CLC Number:
- U461.1







| 1 | Ploeg J, Scheepers B T M, Nunen E V, et al. Design and experimental evaluation of cooperative adaptive cruise control[C]∥International IEEE Conference on Intelligent Transportation Systems, Washington DC, USA, 2011:260-265. |
| 2 | Shladover S E, Su D, Lu X Y. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record Journal of the Transportation Research Board, 2012, 2324(1):63-70. |
| 3 | Feng S, Zhang Y, Li S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47:81-97. |
| 4 | Zhu Y, He H, Zhao D. LMI-based synthesis of string-stable controller for cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2019(99):1-10. |
| 5 | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报:工学版, 2021, 51(1): 349-357. |
| He De-feng, Luo Jie, Shu Xiao-xiang. Delay-feedback predictive cruise control of autonomous and connected vehicles[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(1): 349-357. | |
| 6 | Ploeg J, Semsar-Kazerooni E, Lijster G, et al. Graceful degradation of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1):488-497. |
| 7 | Abou Harfouch Y, Yuan S, Baldi S. An adaptive switched control approach to heterogeneous platooning with inter-vehicle communication losses[J]. IEEE Transactions on Control of Network Systems, 2017, 5(3):1434-1444. |
| 8 | Li B, Zhang Y, Feng Y, et al. Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018,3(3):340-350. |
| 9 | Li T, Wu J, Chan C Y, et al. A cooperative lane change model for connected and automated vehicles[J]. IEEE Access, 2020,8: 54940-54951. |
| 10 | Kianfar R, Ali M, Falcone P, et al. Combined longitudinal and lateral control design for string stable vehicle platooning within a designated lane[C]∥The 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 2014. |
| 11 | Caruntu C F, Maxim A, Rafaila R C. Multiple-lane vehicle platooning based on a multi-agent distributed model predictive control strategy[C]∥The 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 2018. |
| 12 | Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C]∥IEEE International Conference on Robotics and Automation (ICRA), Anchorage, USA,2010. |
| 13 | 王沙晶, 陈建业. 基于Frenet坐标系的智能车运动规划研究[J]. 移动电源与车辆, 2019, 195(1):26-33. |
| Wang Sha-jing, Chen Jian-ye. Motion planning of autonomous vehicle based on Frenet coordinate system[J]. Movable Power Station & Vehicle, 2019, 195(1):26-33. | |
| 14 | 齐雪, 张利军, 赵杰梅. Serret-Frenet坐标系下AUV自适应路径跟踪控制[J]. 系统科学与数学, 2016,36(11):1851-1864. |
| Qi Xue, Zhang Li-jun, Zhao Jie-mei. Adaptive path following control of autonomous underwater vehicles in Serret-Frenet coordinate[J]. Journal of Systems Science and Mathematical Sciences, 2016, 36(11):1851-1864. | |
| 15 | Choi J H, Kim Y H. Associated curves of a Frenet curve and their applications[J]. Applied Mathematics & Computation, 2012, 218(18):9116-9124. |
| 16 | 游峰, 谷广. 面向无人驾驶的车辆协同换道轨迹规划[J]. 科学技术与工程, 2018, 018(15):155-161. |
| You Feng, Gu Guang. Collaborative lane changing trajectory planning of autonomous vehicles[J]. Science Technology and Engineering,2018,18(15) : 155-161. | |
| 17 | 汪佳兴,庄继晖,程晓鸣,等. B样条曲线下的MPC轨迹重规划算法[J]. 重庆理工大学学报:自然科学版,2020,34(4):27-35. |
| Wang Jia-xing, Zhuang Ji-hui, Cheng Xiao-ming, et al. MPC trajectory re-planning algorithm under B-spline curve[J]. Journal of Chongqing Institute of Technology(Natural Sciences Edition), 2020,34(4):27-35. | |
| 18 | Polvara R, Sharma S, Wan J, et al. Obstacle avoidance approaches for autonomous navigation of unmanned surface vehicles[J]. The Journal of Navigation, 2018, 71(1):241-256. |
| 19 | 韩月起,张凯,宾洋,等. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法[J]. 自动化学报, 2020,46(1):153-167. |
| Han Yue-qi, Zhang Kai, Yang Bin, et al. Convex approximation based avoidance theory and path planning MPC for driver-less vehicles[J]. Acta Automatica Sinica, 2020,46(1):153-167. |
| [1] | Hong-bo YANG,Wen-ku SHI,Zhi-yong CHEN,Nian-cheng GUO,Yan-yan ZHAO. Optimization of tooth surface modification based on a two-stage reduction gear system [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1541-1551. |
| [2] | Jia-xu ZHANG,Chong GUO,Chen WANG,Jian ZHAO,Xin-zhi WANG. Performance evaluation of automatic parking system based on hardware in the loop simulation platform [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1552-1560. |
| [3] | Shuai HAO,Chuan-tai CHENG,Jun-nian WANG,Jun-yuan ZHANG,You YU. Ergonomic optimization and test evaluation of sports SUV cockpit layout design [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1477-1488. |
| [4] | Chen HUA,Run-xin NIU,Biao YU. Methods and applications of ground vehicle mobility evaluation [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1229-1244. |
| [5] | Xiong LI,Feng-chong LAN,Ji-qing CHEN,Fang TONG. Comparison of injuries in front impact between Hybird III dummy model and CHUBM human biomechanical model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1264-1272. |
| [6] | Ying-chao ZHANG,Yun-hang LI,Zi-yu GUO,Guo-hua WANG,Zhe ZHANG,Chang SU. Optimization of the aerodynamic drag reduction of a cab behind engine vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 745-753. |
| [7] | Wen-ku SHI,Shu-guang ZHANG,You-kun ZHANG,Zhi-yong CHEN,Yi-fei JIANG,Bin-bin LIN. Parameter identification of magnetorheological damper model with modified seagull optimization algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 764-772. |
| [8] | Wei-min ZHUANG,Shen CHEN,Di WU. Influence of strengthening form of CFRP on transverse impact performance of steel tube [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 819-828. |
| [9] | Jie LI,Tao CHEN,Wen-cui GUO,Qi ZHAO. Pseudo excitation method of vehicle non-stationary random vibration in space domain and its application [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 738-744. |
| [10] | Wei LI,Hai-sheng SONG,Hao-yu LU,Wen-ku SHI,Qiang WANG,Xiao-jun WANG. Linear identification method of hysteresis characteristic of composite leaf springs [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 829-836. |
| [11] | Liang DUAN,Chun-yuan SONG,Chao LIU,Wei WEI,Cheng-ji LYU. State recognition in bearing temperature of high-speed train based on machine learning algorithms [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(1): 53-62. |
| [12] | Wei-min ZHUANG,Shen CHEN,Nan WANG. Influence on thermal stress of autobody steel-aluminum clinch-adhesive connection structure [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(1): 70-78. |
| [13] | Jian-bin CHEN,Song-ze ZHOU,Feng-yong FEI,Yong-long CHEN,Guo-ping LING. Influences of interference fit and knurling connection type on press fitting failure of assembled camshaft [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1959-1966. |
| [14] | Xing-jun HU,Jing-long ZHANG,Yu-fei LUO,Li XIN,Sheng LI,Jin-rui HU,Wei LAN. Influence investigation of cooling tube structure and airflow direction on thermal⁃hydraulic performance of air⁃cooled charge air cooler [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1933-1942. |
| [15] | Yong LUO,Yong-heng WEI,Huan HUANG,Ren-jie XIAO,Lin REN,Huan-yu CUI. Starting control of P2.5 plug⁃in hybrid configuration dual⁃clutch based on driver's intention recognition [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1575-1582. |
|
||