Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (1): 82-93.doi: 10.13229/j.cnki.jdxbgxb20210598
Previous Articles Next Articles
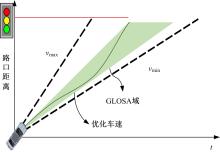
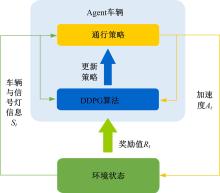
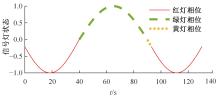
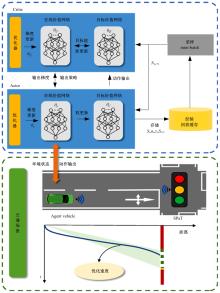
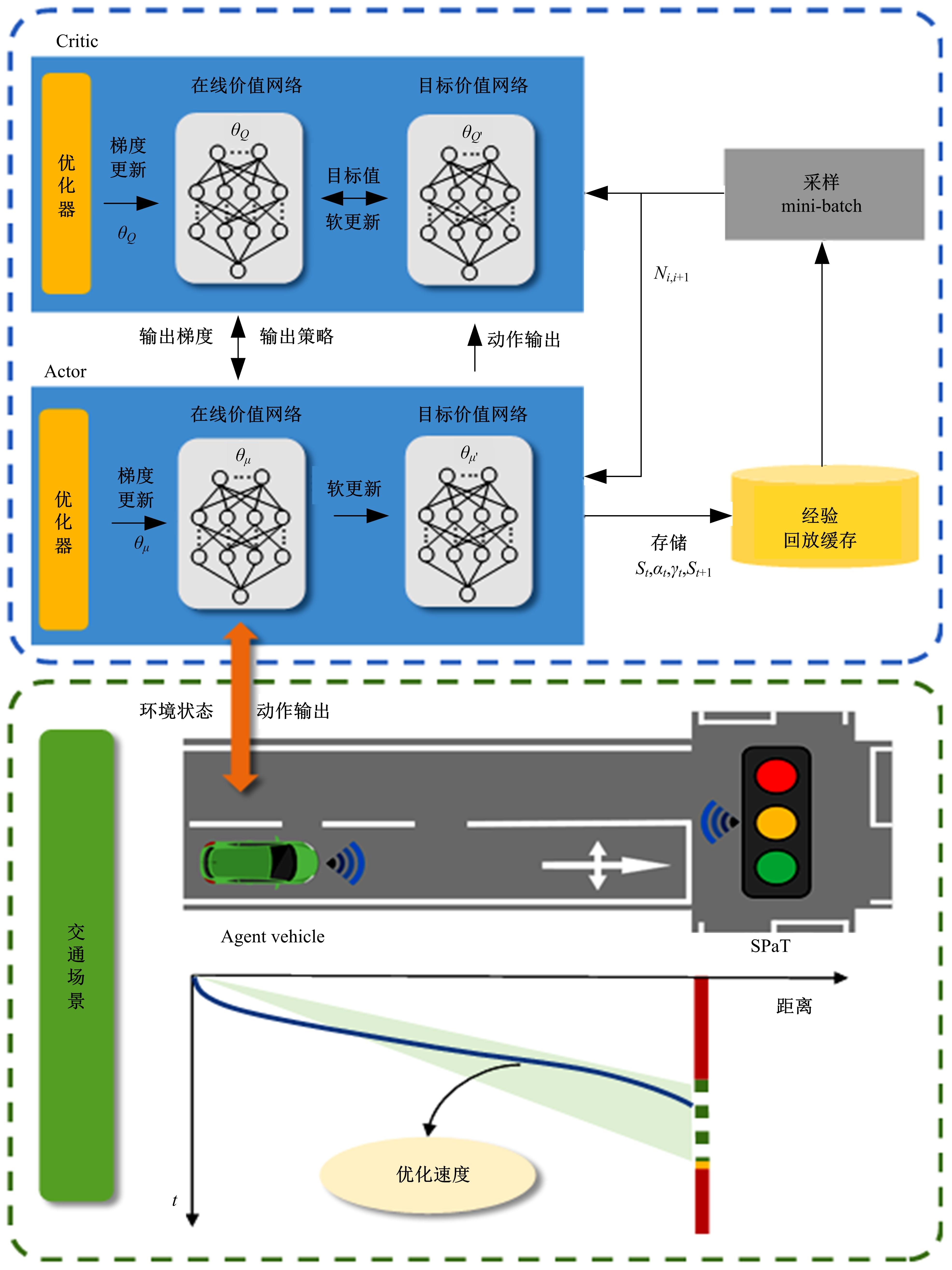
Learning based eco⁃driving strategy of connected electric vehicle at signalized intersection
Wei-chao ZHUANG( ),Hao-nan Ding,Hao-xuan DONG,Guo-dong YIN(),Xi WANG,Chao-bin ZHOU,Li-wei XU
),Hao-nan Ding,Hao-xuan DONG,Guo-dong YIN(),Xi WANG,Chao-bin ZHOU,Li-wei XU
- School of Mechanical Engineering,Southeast University,Nanjing 211189,China
CLC Number:
- U469.72






| 1 | 《中国公路学报》编辑部.中国汽车工程学术研究综述·2017 [J]. 中国公路学报, 2017, 30(6): 1-197. |
| Editorial Department of China Journal of Highway. Review on China's automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1-197. | |
| 2 | 徐兴,陈特,陈龙,等.分布式驱动电动汽车转矩节能优化分配[J].中国公路学报, 2018, 31(5): 183-190. |
| Xu Xing, Chen Te, Chen Long, et al. Optimal distribution of torque energy saving for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2018, 31(5): 183-190. | |
| 3 | Michael Sivak, Brandon Schoettle. Eco-driving: strategic, tactical, and operational decisions of the driver that influence vehicle fuel economy[J]. Transport Policy, 2012, 22: 96-99. |
| 4 | 付锐,张雅丽,袁伟.生态驾驶研究现状及展望[J].中国公路学报, 2019, 32(3): 1-12. |
| Fu Rui, Zhang Ya-li, Yuan Wei. Research status and prospects of eco-driving[J]. China Journal of Highway and Transport, 2019, 32(3): 1-12. | |
| 5 | Ye Fei, Hao Peng, Qi Xue-wei, et al. Prediction-based eco-approach and departure at signalized intersections with speed forecasting on preceding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(4): 1378-1389. |
| 6 | 金辉,张俊.智能车经济性起步车速规划研究[J]. 汽车工程, 2020, 42(2): 270-277. |
| Jin Hui, Zhang Jun. Research on economic speed planning of intelligent vehicle for starting stage[J]. Automotive Engineering, 2020, 42(2): 270-277. | |
| 7 | 洪金龙,高炳钊,董世营,等.智能网联汽车节能优化关键问题与研究进展[J]. 中国公路学报, 2021,34(11):306-334. |
| Hong Jin-long, Gao Bing-zhao, Dong Shi-ying, et al. Key problems and research progress of energy saving optimization for intelligent connected vehicles[J]. China Journal of Highway and Transport, 2021,34(11):306-334. | |
| 8 | Rainer Stahlmann, Malte Möller, Alexej Brauer, et al. exploring GLOSA systems in the field: technical evaluation and results[J]. Computer Communications, 2018, 120: 112-124. |
| 9 | 陈浩, 庄伟超, 殷国栋, 等.网联电动汽车信号灯控路口经济性驾驶策略[J]. 东南大学学报:自然科学版, 2021, 51(1): 178-186. |
| Chen Hao, Zhuang Wei-chao, Yin Guo-dong, et al. Eco-driving control strategy of connected electric vehicle at signalized intersection[J]. Journal of Southeast University (Natural Science Edition), 2021, 51(1): 178-186. | |
| 10 | Hao Peng, Wu Guo-yuan, Kanok Boriboonsomsin, et al. Eco-approach and departure (EAD) application for actuated signals in real-world traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(1): 30-40. |
| 11 | 解少博,辛宗科,李会灵,等.插电式混合动力公交车电池配置和能量管理策略协同优化的研究[J]. 汽车工程, 2018, 40(6): 625-631, 645. |
| Xie Shao-bo, Xin Zong-ke, Li Hui-ling, et al. A study on coordinated optimization on battery capacity and energy management strategy for a plug-in hybrid electric bus[J]. Automotive Engineering, 2018, 40(6): 625-631, 645. | |
| 12 | Li Chun-ming, Zhang Tao, Sun Xiao-xia, et al. Connected ecological cruise control strategy considering multi-intersection traffic flow[J]. IEEE Access, 2020, 8: 219378-219390. |
| 13 | Han Ji-hun, Ardalan Vahidi, Antonio Sciarretta. Fundamentals of energy efficient driving for combustion engine and electric vehicles: an optimal control perspective[J]. Automatica, 2019, 103: 558-572. |
| 14 | 朱冰,蒋渊德,赵健,等.基于深度强化学习的车辆跟驰控制[J].中国公路学报,2019,32(6):53-60. |
| Zhu Bing, Jiang Yuan-de, Zhao Jian, et al. A car-following control algorithm based on deep reinforcement learning[J]. China Journal of Highway and Transport,2019,32(6):53-60. | |
| 15 | Wu Yuan-kai, Tan Hua-chun, Peng Jian-kun, et al. Deep reinforcement learning of energy management with continuous control strategy and traffic information for a series-parallel plug-in hybrid electric bus[J]. Applied Energy, 2019, 247: 454-466. |
| 16 | Li Yue-cheng, He Hong-wen, Amir Khajepour, et al. Energy management for a power-split hybrid electric bus via deep reinforcement learning with terrain information[J]. Applied Energy, 2019, 255: 113762. |
| 17 | Zhou Mo-fan, Yu Yang, Qu Xiao-bo. Development of an efficient driving strategy for connected and automated vehicles at signalized intersections: a reinforcement learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(1): 433-443. |
| 18 | Zhu Zhao-xuan, Shobhit Gupta, Abhishek Gupta, et al. A deep reinforcement learning framework for eco-driving in connected and automated hybrid electric vehicles[J/OL].[2021-01-13]. . |
| 19 | Dimitri Bertsekas. Reinforcement Learning and Optimal Control[M]. Belmont: Athena Scientific, 2019. |
| 20 | Xu Xin, Zuo Lei, Li Xin, et al. A reinforcement learning approach to autonomous decision making of intelligent vehicles on highways[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 50(10): 3884-3897. |
| 21 | Pi Jian-zong. A reinforcement learning framework for autonomous eco-driving[D]. The Ohio State University, 2020. |
| 22 | John Schulman, Filip Wolski, Prafulla Dhariwal, et al. Proximal policy optimization algorithms[J/OL].[2017-04-23].. |
| 23 | David Silver, Guy Lever, Nicolas Heess, et al. Deterministic policy gradient algorithms[C]∥ International Conference on Machine Learning, Detroit, USA, 2014: 387-395. |
| [1] | Lei CHEN,Yang WANG,Zhi-sheng DONG,Ya-qi SONG. A vehicle agility control strategy based on steering intent [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1257-1263. |
| [2] | Xin CHEN,Guan-chen ZHANG,Kang-ming ZHAO,Jia-ning WANG,Li-fei YANG,De-rong SITU. Influence of lap welds on the lightweight design of welded aluminum structures [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1282-1288. |
| [3] | Yong ZHANG,Feng-zhao MAO,Shui-chang LIU,Qing-yu WANG,Shen-gong PAN,Guang-sheng ZENG. Optimization on distortion grid of vehicle external flow field based on Laplacian Algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1289-1296. |
| [4] | Shao-hua WANG,Kun CHU,De-hua SHI,Chun-fang YIN,Chun LI. Robust compound coordinated control of HEV based on finite⁃time extended state observation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1272-1281. |
| [5] | Yan-li YIN,Xue-jiang HUANG,Xiao-liang PAN,Li-tuan WANG,Sen ZHAN,Xin-xin ZHANG. Hierarchical control of hybrid electric vehicle platooning based on PID and Q⁃Learning algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1481-1489. |
| [6] | Gui-shen YU,Xin CHEN,Zi-tao WU,Yi-xiong CHEN,Guan-chen ZHANG. Analysis of microstructure and mechanical properties of probeless friction stir spot welding joint in AA6061⁃T6 aluminum thin plate [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1338-1344. |
| [7] | Yan-tao TIAN,Xing HUANG,Hui-qiu LU,Kai-ge WANG,Fu-qiang XU. Multi⁃mode behavior trajectory prediction of surrounding vehicle based on attention and depth interaction [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1474-1480. |
| [8] | Hong-bo YANG,Wen-ku SHI,Zhi-yong CHEN,Nian-cheng GUO,Yan-yan ZHAO. Multi⁃objective optimization of macro parameters of helical gear based on NSGA⁃Ⅱ [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1007-1018. |
| [9] | Rui ZHAO,Yun LI,Hong-yu HU,Zhen-hai GAO. Vehicle collision warning method at intersection based on V2I communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1019-1029. |
| [10] | Xiao-bo CHEN,Ling CHEN. Variational Bayesian cooperative target tracking with unknown localization noise statistics [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1030-1039. |
| [11] | Yan-tao TIAN,Yan-shi JI,Huan CHANG,Bo XIE. Deep reinforcement learning augmented decision⁃making model for intelligent driving vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 682-692. |
| [12] | Jian ZHANG,Jin-bo LIU,Yuan GAO,Meng-ke LIU,Zhen-hai GAO,Bin YANG. Localization algorithm of vehicular sensor based on multi⁃mode interaction [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 772-780. |
| [13] | Ke HE,Hai-tao DING,Xuan-qi LAI,Nan XU,Kong-hui GUO. Wheel odometry error prediction model based on transformer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 653-662. |
| [14] | Yan-ran LIU,Qing-yu MENG,Hong-yan GUO,Jia-lin LI. Vehicle trajectory prediction combined with high definition map in graph attention mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 792-801. |
| [15] | Bo XIE,Rong GAO,Fu-qiang XU,Yan-tao TIAN. Stability control of human⁃vehicle shared steering system under low adhesion road conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 713-725. |
|
||