Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (1): 206-216.doi: 10.13229/j.cnki.jdxbgxb20190836
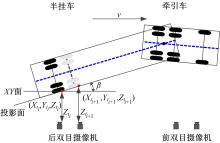
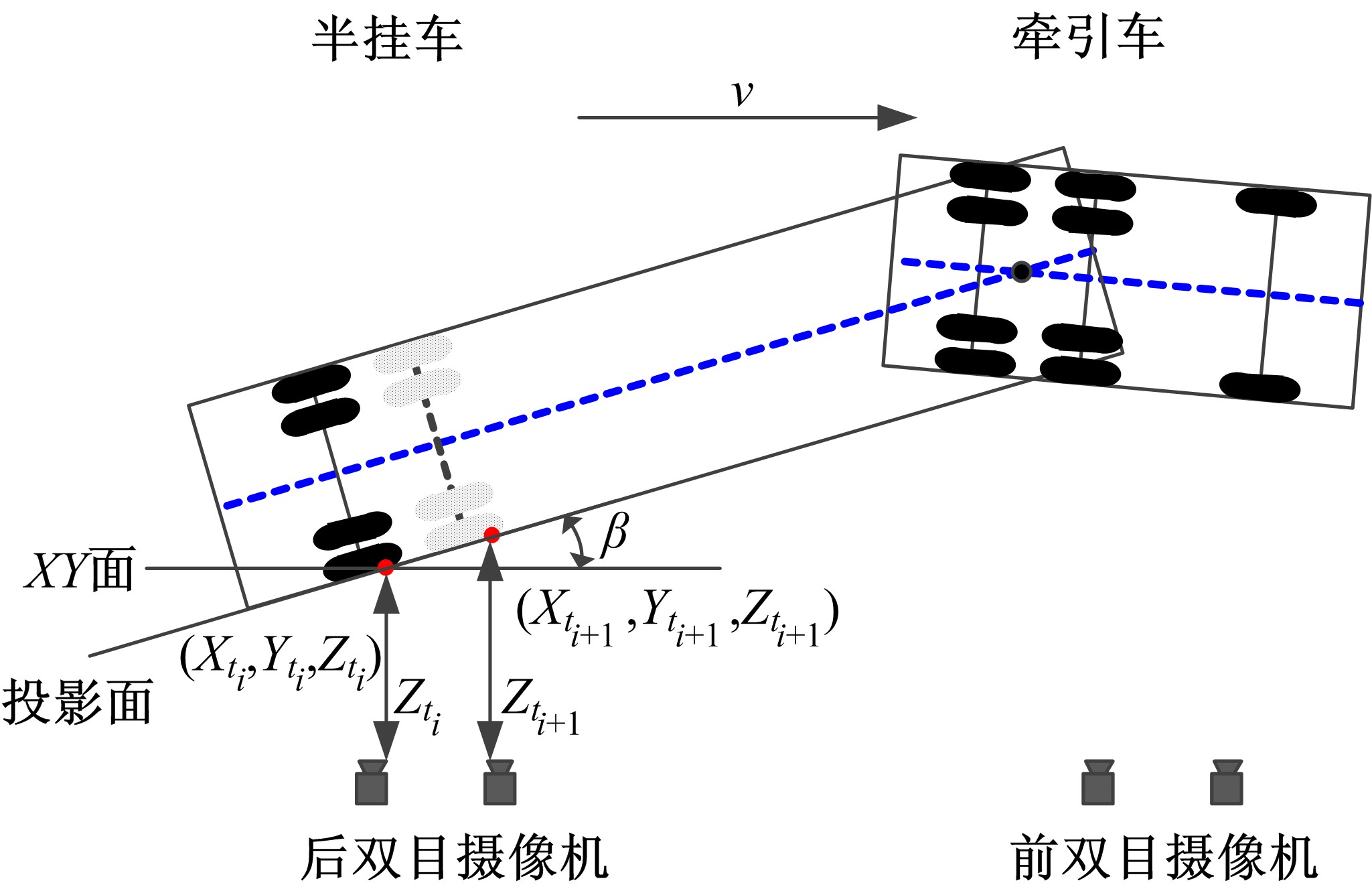
Visual detection method for vehicle braking time sequence based on slip rate identification
Dao WU1( ),Li-bin ZHANG1(),Yun-xiang ZHANG2,Hong-ying SHAN3,Hong-mei SHAN1
),Li-bin ZHANG1(),Yun-xiang ZHANG2,Hong-ying SHAN3,Hong-mei SHAN1
- 1.College of Transportation,Jilin University,Changchun 130022,China
2.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
3.School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
CLC Number:
- U472.9







| 1 | 郭正康. 现代汽车列车设计与使用[M]. 北京:北京理工大学出版社, 2006. |
| 2 | 机动车安全技术检验项目和方法[S]. |
| 3 | Chen L K, Hsu J Y. Investigation of jack-knife prevention in an articulated scaled vehicle[J]. Vehicle System Dynamics, 2008, 46(Sup.1): 765-777. |
| 4 | Goodarzi A, Behmadi M, Esmailzadeh E. An optimised braking force distribution strategy for articulated vehicles[J]. Vehicle System Dynamics, 2008, 46(Sup.1): 849-856. |
| 5 | 李臣, 李兴虎, 张红卫, 等. 半挂汽车列车转弯制动试验方法研究[J]. 汽车工程, 2015, 37(7): 777-781, 801. |
| Li Chen, Li Xing-hu, Zhang Hong-wei, et al. A study on the test methods of cornering braking for tractor-semitrailer combination[J]. Automotive Engineering, 2015, 37(7): 777-781, 801. | |
| 6 | 何仁, 陈珊珊. 基于液力缓速器换挡控制的半挂汽车列车制动稳定性[J]. 吉林大学学报:工学版, 2017, 47(6): 1677-1687. |
| He Ren, Chen Shan-shan. Braking stability of tractor-semitrailer based on gear-shifting strategy of hydraulic retarder[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(6): 1677-1687. | |
| 7 | 庄汉忠, 吴庆友. 车辆制动时序的测试[J]. 实验室研究与探索, 1991(1): 95-96, 103. |
| Zhuang Han-zhong, Wu Qing-you. Test of Vehicle Braking time sequence[J]. Research and Exploration In Laboratory, 1991(1): 95-96, 103. | |
| 8 | 李宁. 载货汽车气压制动系统制动时序检测方法研究[D]. 长春: 吉林大学交通学院, 2015. |
| Li Ning. Research on detection method of braking time sequence of truck's air brake system[D]. Changchun: College of Transportation, Jilin University, 2015. | |
| 9 | Li X, Chen W, Xu Q. A novel dynamic measurement system for evaluating the braking coordination of articulated vehicles[J]. Journal of Sensors, 2016: 1-10. |
| 10 | ―2016道路运输车辆综合性能要求和检验方法[S]. |
| 11 | 陈南峰, 谷占勋, 应朝阳. 未来汽车列车制动技术改进建议及其检测技术探讨[J]. 汽车与安全, 2015(4):114-119. |
| Chen Nan-feng, Gu Zhan-xun, Ying Zhao-yang. Combination of vehicles braking technology improvement suggestions for future and discussion on the detection technology[J]. Auto & Safety, 2015(4): 114-119. | |
| 12 | 敬天龙. 一种汽车列车制动性能检测台[P]. 2016. |
| 13 | 余志生. 汽车理论[M]. 5版.北京: 机械工业出版社, 2009. |
| 14 | 张广军. 视觉测量[M]. 北京:科学出版社, 2008. |
| 15 | 关立文, 赵肖, 王立平. 基于次摆线轨迹的铣削层厚度模型[J]. 清华大学学报:自然科学版, 2017, 57(11): 1185-1189. |
| Guan Li-wen, Zhao Xiao, Wang Li-ping. et al. Milling-layer thickness model based on a trochoid trajectory[J]. Journal of Tsinghua University (Science and Technology), 2017, 57(11): 1185-1189. | |
| 16 | Zhang Z Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2000, 22(11): 1330-1334. |
| 17 | Madsen K, Nielsen H B, Tingleff O. Methods for non-linear least squares problems [M]. 2nd ed. Copenhagen: Technical University of Denmark, 2004: 5-24. |
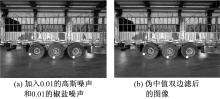
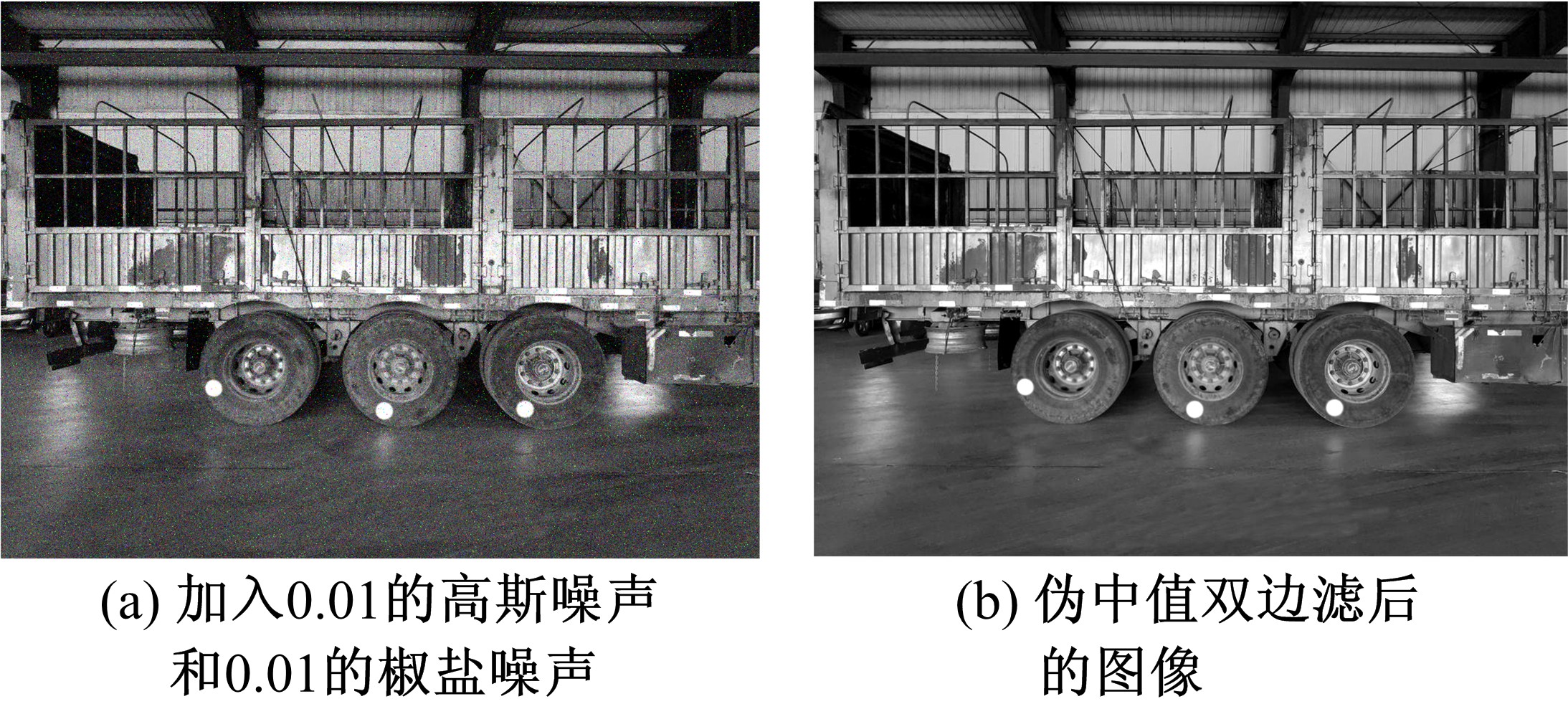
| 18 | 王玉灵. 基于双边滤波的图像处理算法研究[D]. 西安:西安电子科技大学理学院, 2010. |
| Wang Yu-ling. Study of Algorithm in Image Processing Based on the Bilateral Filter[D]. Xi'an: School of Science, Xidian University, 2010. | |
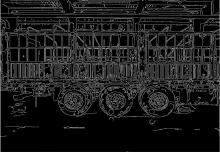
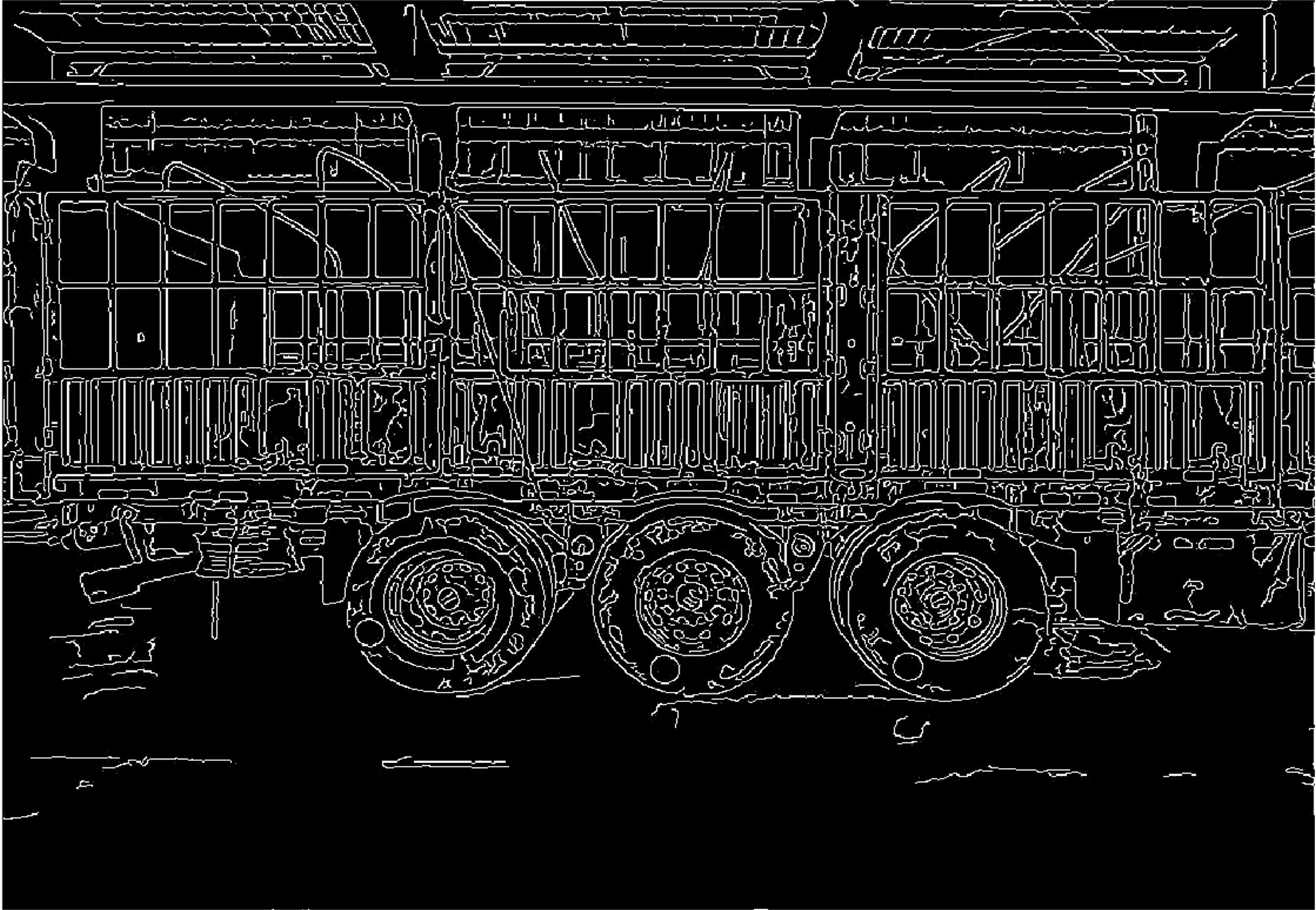
| 19 | Canny J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986(6): 679-698. |
| 20 | Djekoune A O, Messaoudi K, Amara K. Incremental circle hough transform: an improved method for circle detection[J]. Optik, 2017, 133: 17-31. |
| 21 | ―2017.测量不确定度评定和表示[S]. |
| [1] | Fang-wu MA,Hong-yu LIANG,Qiang WANG,Yong-feng PU. In-plane dynamic crushing of dual-material structure with negative Poisson′s ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 114-121. |
| [2] | Lu XIONG,Yan-chao WEI,Le-tian GAO. Inertial measurement unit/wheel speed sensor integrated zero-speed detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 134-138. |
| [3] | Ji-qing CHEN,Qing-sheng LAN,Feng-chong LAN,Zhao-lin LIU. Trajectory tracking control based on tire force prediction and fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1565-1573. |
| [4] | Zhi-gang YANG,Ya-jun FAN,Chao XIA,Shi-jun CHU,Xi-zhuang SHAN. Drag reduction of a square⁃back Ahmed model based on bi⁃stable wake [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1635-1644. |
| [5] | Zhe SHEN,Yi-gang WANG,Zhi-gang YANG,Yin-zhi HE. Drift error correction of unknown sound source in wind tunnel using approximation method [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1584-1589. |
| [6] | Zhao LIU,Jiang-lin CHENG,Yu-tian ZHU,Li-hui ZHENG. Vertical vibration modeling and motion correlation analysis of rail vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1600-1607. |
| [7] | Chang-qing DU,Xi-liang CAO,Biao HE,Wei-qun REN. Parameters optimization of dual clutch transmission based on hybrid particle swarm optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1556-1564. |
| [8] | Jing LI,Qiu-jun SHI,Liang HONG,Peng LIU. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1545-1555. |
| [9] | Fei GAO,Yang XIAO,Wen-hua ZHANG,Jin-xuan QI,Zi-qiao LI,Xiao-yuan MA. Influence of coupling of elevated temperature and state of charge on mechanical response of Li⁃ion battery cells [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1574-1583. |
| [10] | Xiao-yu LI,Nan XU,Tao QIU,Kong-hui GUO. Influence of anisotropic stiffness on tire mechanical properties and vehicle handling characteristics under combined slip situations [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 389-398. |
| [11] | Xin CHEN,Ning WANG,Chuan-liang SHEN,Xiao FENG,Chang-hai YANG. Effect of rearview mirror modeling on aerodynamic noise of front window [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 426-436. |
| [12] | Yin-ping LI,Tian-xu JIN,Li LIU. Design and dynamic characteristic simulation of pantograph⁃catenary continuous energy system for pure electric LHD [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 454-463. |
| [13] | Chen-guang LAI,Qing-yu WANG,Bo HU,Kai-ping WEN,Yan-yu CHEN. Design and optimization of a car empennage with winglet under effect of static aeroelasticity [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 399-407. |
| [14] | Hui YE,Chang LIU,Kang-kang YAN. Application of fiber reinforced composite in auto⁃body panel [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 417-425. |
| [15] | Fang-wu MA,Hong-yu LIANG,Ying ZHAO,Meng YANG,Yong-feng PU. Multi⁃objective crashworthiness optimization design of concave triangles cell structure with negative Poisson′s ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 29-35. |
|
||