Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (7): 1499-1508.doi: 10.13229/j.cnki.jdxbgxb20210049
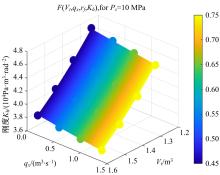
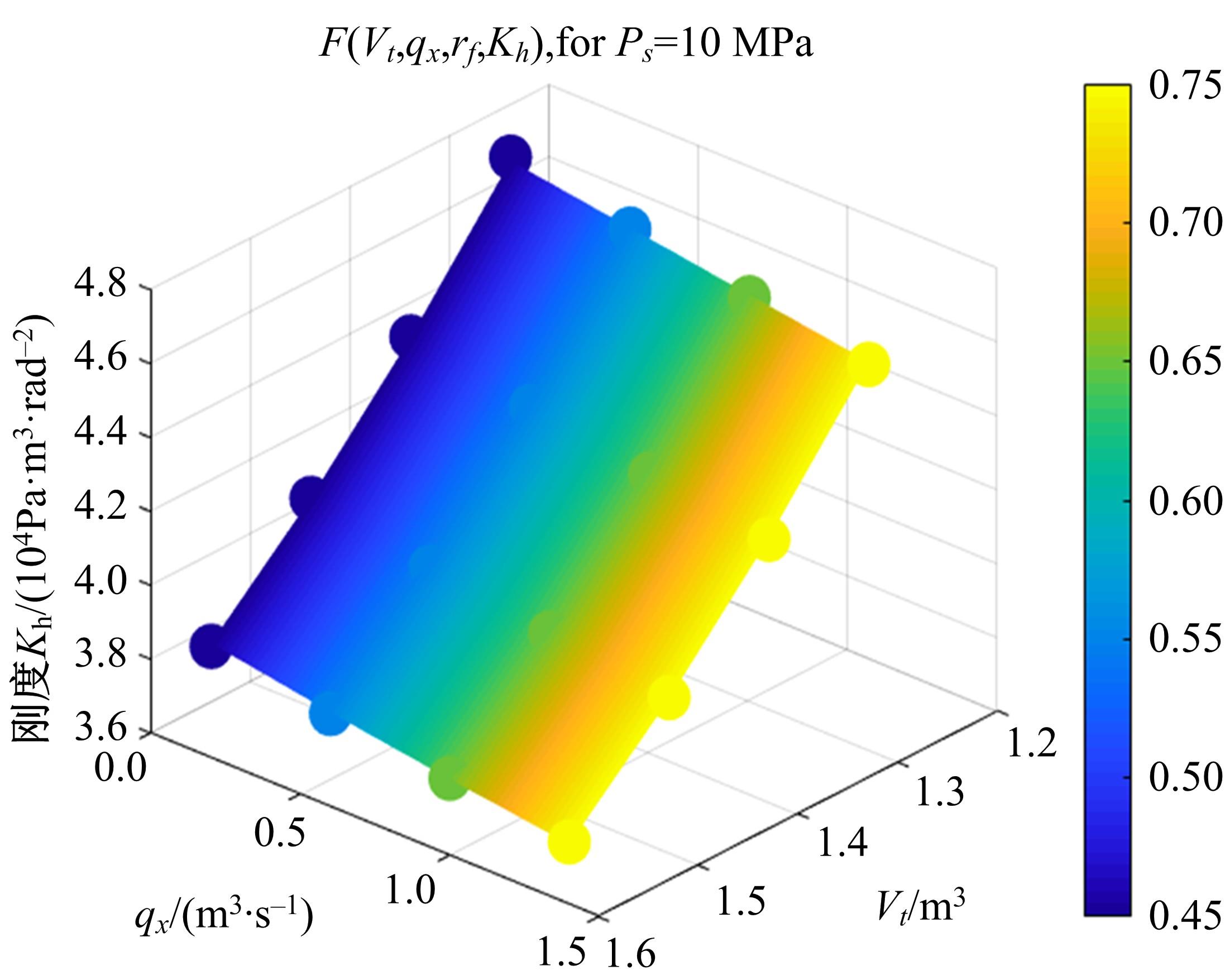
Design and stiffness continuously adjustable analysis of hydraulic servo flexible drive mechanism
Lin JIANG1,2( ),Ling ZHOU1,Hui ZHAO1,2
),Ling ZHOU1,Hui ZHAO1,2
- 1.Key Laboratory of Metallurgical Equipment and Control Technology,Ministry of Education,Wuhan University of Science and Technology,Wuhan 430081,China
2.Institute of Robotics and Intelligent Systems,Wuhan University of Science and Technology,Wuhan 430081,China
CLC Number:
- TH12


| 1 | 王旭,陈乃建,王超,等. 助老助残轮椅用绳传动机械臂结构设计[J]. 济南大学学报:自然科学版,2020,34(3):300-305. |
| Wang Xu, Chen Nai-jian, Wang Chao, et al. Structure design of rope-driven mechanical arm for elderly and disabled wheel chair[J]. Journal of University of Jinan (Natural Science Edition),2020,34(3):300-305. | |
| 2 | Mahdi H, Chavoshian C, Mostafa J,et al. Recurrent neuro-fuzzy model of pneumatic artificial muscle position[J]. Journal of Mechanical Science and Technology,2020,34(1):499-508. |
| 3 | 朱嘉齐,章家岩,冯旭刚. 柔性臂测量机的圆光栅偏心参数标定算法[J]. 电子测量与仪器学报,2019,33(8):1-7. |
| Zhu Jia-qi, Zhang Jia-yan, Feng Xu-gang. Calibration algorithm of circular grating eccentric parameters for flexible arm measuring machine[J]. Journal of Electrical Measurement and Instrumentation,2019,33(8):1-7. | |
| 4 | Montazeri A, West C, Monk S D,et al. Dynamic modelling and parameter estimation of a hydraulic robot manipulator using a multi-objective genetic algorithm[J]. International Journal of Control,2017,90(4):661-683. |
| 5 | 蔡若凡. 一种新型的可变刚度柔性关节设计与控制研究[D]. 哈尔滨:哈尔滨工业大学机电工程学院,2017. |
| Cai Ruo-fan. Design and control research of a novel flexible joint with variable stiffness[D]. Harbin:School of Mechanic Engineering, Harbin Institute of Technology,2017. | |
| 6 | Sohn J W, Gang H G, Choi S B. An experimental study on torque characteristics of magnetorheological brake with modified magnetic core shape[J]. Advances in Mechanical Engineering, 2018, 10(1):1-8. |
| 7 | Groothuis S, Rusticelli G, Zucchelli A,et al. The variable stiffness actuator vsaUT-II:mechanical design,modeling,and identification[J]. IEEE/ASME Transactions on Mechatronics,2014,19(2):589-597. |
| 8 | 张明, 房立金, 孙凤,等. 永磁变刚度柔性关节的力学分析与控制器设计[J]. 机械工程学报, 2019, 55(5):89-96. |
| Zhang Ming, Fang Li-jin, Sun Feng,et al. Mechanical analysis and controller design of flexible joint with permanent magnet variable stiffness[J]. Journal of Mechanical Engineering,2019,55(5):89-96. | |
| 9 | 李满宏,马艳悦,张明路,等. 基于凸轮机构的变刚度仿生柔性关节设计与分析[J]. 仪器仪表学报,2019,40(2):216-225. |
| Li Man-hong, Ma Yan-yue, Zhang Ming-lu,et al. Design and analysis of bionic flexible joint with variable stiffness based on cam mechanism[J]. Chinese Journal of Scientific Instrument,2019,40(2): 216-225. | |
| 10 | 蒋林,陈新元,赵慧,等. 基于液压转角伺服的液压关节研究[J]. 机电工程,2011,28(3):265-268. |
| Jiang Lin, Chen Xin-yuan, Zhao Hui, et al. Research on hydraulic joint based on hydraulic angle servo[J]. Mechanical and Electrical Engineering,2011,28(3):265-268. | |
| 11 | 潘孝越,蒋林, 任利胜,等. 液压伺服柔顺关节的变刚度设计与研究[J]. 武汉科技大学学报,2020,43(4):290-296. |
| Pan Xiao-yue, Jiang Lin, Ren Li-sheng, et al. Design and research on variable stiffness of hydraulic servo compliant joint[J]. Journal of Wuhan University of Science and Technology,2020,43(4):290-296. | |
| 12 | 恭飞,王雪婷,杜奕. 基于AMEsim的液压系统建模与仿真[J]. 软件,2020,41(1):42-45. |
| Gong Fei, Wang Xue-ting, Du Yi. Modeling and simulation of hydraulic system based on AMESim [J]. Software, 2020,41(1) :42-45. | |
| 13 | 彭贺,马文星,王忠山,等. 丘陵山地拖拉机车身调平控制仿真分析与试验[J].吉林大学学报:工学版,2019,49(1):157-165. |
| Peng He, Ma Wen-xing, Wang Zhong-shan,et al. Simulation analysis and experiment on leveling control of tractor body in hilly mountains[J]. Journal of Jilin University (Engineering and Technology Edition), 2019,49(1):157-165. | |
| 14 | 陈德刚,孙仁云,陈勇,等. 基于AMESim的天然气发动机电控调压器仿真研究[J]. 机床与液压,2012,40(11):109-112. |
| Chen De-gang, Sun Ren-yun, Chen Yong,et al. Simulation research on electrically controlled voltage regulator of natural gas engine based on AMESim[J]. Machine Tool & Hydraulics,2012, 40(11):109-112. | |
| 15 | Jiang Lin, Zhu Zhi-chao, Liu Hong-hai,et al. Analysis of dynamic characteristics of water hydraulic rotating angle self-servo robot joint actuator[J]. Journal of Intelligent & Robotic Systems,2018,92(2):279-291. |
| 16 | 马铭泽,田拥胜,王涛,等. 基于AMESim的比例伺服流量阀建模与仿真[J]. 液压气动与密封,2017, 37(1):16-19. |
| Ma Ming-ze, Tian Yong-sheng, Wang Tao,et al. Modeling and simulation of proportional servo flow valve based on AMESim[J]. Hydraulics Pneumatics & Seals,2017,37(1):16-19. | |
| 17 | 徐巨华. 油液体积弹性模量对电液伺服系统动态特性影响研究[D]. 杭州:浙江大学机械工程学院,2013. |
| Xu Ju-hua. Study on the influence of oil volume elastic modulus on dynamic characteristics of electro-hydraulic servo system[D]. Hangzhou:School of Mechanic Engineering, Zhejiang University,2013. | |
| 18 | 周志鸿,闫建辉,刘连华. 间隙泄漏量的分析计算[J]. 凿岩机械气动工具,2002(4):14-17. |
| Zhou Zhi-hong, Yan Jian-hui, Liu Lian-hua. Analysis and calculation of clearance leakage[J]. Rock Drilling Machinery and Pneumatic Tools,2002(4):14-17. | |
| 19 | 伍家驹,于阳,李园庭,等. 非对称T型滤波器设计的一种五维可视化算法[J]. 中国电机工程学报,2010,30(33):30-36. |
| Wu Jia-ju, Yu Yang, Li Yuan-ting,et al. A five-dimensional visualization algorithm for design of asymmetric T-filter[J]. Proceedings of the CSEE,2010,30(33):30-36. | |
| 20 | 伍家驹,马若飞,王长坤,等. 实现五维数据可视化的一种方法[J]. 电力电子技术, 2011,45(12):90-92. |
| Wu Jia-ju, Ma Ruo-fei, Wang Chang-kun, et al. A method to realize five-dimensional data visualization[J]. Power Electronics,2011,45(12):90-92. |
| [1] | Xue-yong LI,Zhong-qiu ZHAO,Chun-song ZHANG,Chang-hou LU. Finite element based calculation method of human⁃robot interaction force [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1612-1619. |
| [2] | Ping YU,Te MU,Li-hui ZHU,Zi-ye ZHOU,Jie SONG. Nonlinear dynamic analysis and stability control of drilling tool conveying mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 820-830. |
| [3] | Ming-wei HU,Hong-guang WANG,Xin-an PAN. Global structural optimization design of collaborative robots using orthogonal design [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 370-378. |
|
||