Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (5): 1612-1619.doi: 10.13229/j.cnki.jdxbgxb20200501
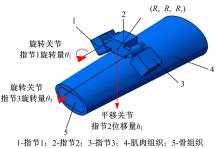
Finite element based calculation method of human⁃robot interaction force
Xue-yong LI1,2,3( ),Zhong-qiu ZHAO1,2,Chun-song ZHANG1,2,Chang-hou LU1,2,3
),Zhong-qiu ZHAO1,2,Chun-song ZHANG1,2,Chang-hou LU1,2,3
- 1.School of Mechanical Engineering,Shandong University,Jinan 250061,China
2.Key Laboratory of High Efficiency and Clean Mechanical Manufacture,Ministry of Education,Shandong University,Jinan 250061,China
3.National Demonstration Center for Experimental Mechanical Engineering Education,Shandong University,Jinan 250061,China
CLC Number:
- TP242.3





| 1 | Hu J, Hou Z G, Chen Y X, et al. Lower limb rehabilitation robots and interactive control methods[J]. Acta Automatica Sinica, 2014, 40(11): 2377-2390. |
| 2 | Basteris A, Nijenhuis S M, Stienen A H A, et al. Training modalities in robot-mediated upper limb rehabilitation in stroke: a framework for classification based on a systematic review[J]. Journal of Neuroengineering and Rehabilitation, 2014, 11(1): 1-15. |
| 3 | 曹恩国, 刘坤, 吉硕, 等. 减重站起康复训练系统机械结构设计与优化[J]. 吉林大学学报: 工学版, 2019, 49(5): 1558-1566. |
| Cao En-guo, Liu Kun, Ji Shuo, et al. Mechanical structure design and optimization of weight-support STS rehabilitation training system[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1558-1566. | |
| 4 | 刘坤, 赵建琛, 曹恩国, 等. 基于下肢动力学检测分析的站起康复训练机器人控制[J]. 吉林大学学报: 工学版, 2015, 45(3): 837-844. |
| Liu Kun, Zhao Jian-chen, Cao En-guo, et al. Control methods for standing-up rehabilitation robot based on estimation and analysis of lower limb kinetics[J]. Journal of Jilin University(Engineering and Technology Edition), 2015, 45(3): 837-844. | |
| 5 | Today Robotics. Life science robotics[EB/OL].[2020-05-14]. |
| 6 | Zhao Z, Li X, Lu C, et al. Compliant manipulation method for a nursing robot based on physical structure of human limb[J]. Journal of Intelligent & Robotic Systems, 2020, 100: 973-986. |
| 7 | Gan H, Li X, Lu C, et al. Biomechanical study of human limbs under a robot hand manipulation using finite element analysis[C]∥IEEE International Conference on Mechatronics and Automation, Changchun,China, 2018: 1856-1860. |
| 8 | 于建均, 安硕, 阮晓钢, 等. 基于仿人机械手的五指力封闭抓取算法[J]. 计算机测量与控制, 2019, 27(5): 192-198. |
| Yu Jian-jun, An Shuo, Ruan Xiao-gang, et al. Five-finger closed grasp algorithm based on humanoid manipulator[J]. Computer Measurement and Control, 2019, 27(5): 192-198. | |
| 9 | 邹俞, 晁建刚, 林万洪. 基于力封闭的虚拟手稳定抓持力生成方法[J]. 计算力学学报, 2019, 36(4): 548-554. |
| Zou Yu, Chao Jian-gang, Lin Wan-hong. Force closure based virtual hand stable grip generation method[J]. Chinese Journal of Computational Mechanics, 2019, 36(4): 548-554. | |
| 10 | Tian J, Jia Y B. Modeling deformations of general parametric shells grasped by a robot hand[J]. IEEE Transactions on Robotics, 2009, 26(5): 1297-1302. |
| 11 | Zaidi L, Corrales J A, Bouzgarrou B C, et al. Model-based strategy for grasping deformable objects using a multi-fingered robotic hand[J]. Robotics and Autonomous Systems, 2017, 95: 196-206. |
| 12 | Kim D, Maeda Y, Komiyama S.Caging-based grasping of deformable objects for geometry-based robotic manipulation[J].Robomech Journal, 2019, 6(3):1-13. |
| [1] | Ping YU,Te MU,Li-hui ZHU,Zi-ye ZHOU,Jie SONG. Nonlinear dynamic analysis and stability control of drilling tool conveying mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 820-830. |
| [2] | Jin-guo WANG,Kai HUANG,Rui-fang YAN,Shuai REN,Zhi-qiang WANG,Jin GUO. Effect of carbon equivalent elements on fluidity of hypoeutectic ductile iron by cellular automata finite element method [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 855-865. |
| [3] | Bo WANG,Yang-yang HE,Bing-bing NIE,Shu-cai XU,Jin-huan ZHANG. Abdominal injury of vehicle occupant in underbody blast events [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 792-798. |
| [4] | Liu ZHANG,Xiao-yi ZHENG,Fan ZHANG,Yu ZHAO,Shu-yang ZHAO. Structural optimization design of large tolerance and multi⁃flexibility lens subassembly [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 478-485. |
| [5] | Fan YANG,Xu-dong ZHANG,Meng ZHAO,Bo SHE,Jun-kai DENG. Deformation behavior of shape memory alloy-metallic glass matrix composites based on finite element calculations [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 172-180. |
| [6] | Ming-wei HU,Hong-guang WANG,Xin-an PAN. Global structural optimization design of collaborative robots using orthogonal design [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 370-378. |
| [7] | Chun-guo LIU,Xiao-tong YU,Tao YUE,Dong-lai LI,Ming-zhe ZHANG. Springback prediction for double-curvature stiffened panel during milling [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 188-199. |
| [8] | Ya-feng GONG,Jia-xiang SONG,Hai-peng BI,Guo-jin TAN,Guo-hai HU,Si-yuan LIN. Static test and finite element analysis of scale model of fabricated box culvert [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1728-1738. |
| [9] | Yin-ping LI,Tian-xu JIN,Li LIU. Design and dynamic characteristic simulation of pantograph⁃catenary continuous energy system for pure electric LHD [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 454-463. |
| [10] | Wei-min ZHUANG,Hong-da SHI,Dong-xuan XIE,Guan-nan YANG. Thickness distribution of adhesive layer in dissimilar clinch⁃adhesive hybrid joint with steel and aluminum alloy [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 100-106. |
| [11] | Xin LI,Yan-peng SUN,Dan WANG,Jun-xu CHEN,Zheng-wei GU,Hong XU. Finite element numerical simulation for automobile front floor forming [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1608-1614. |
| [12] | Xiao⁃qin ZHOU,Lu YANG,Lei ZHANG,Li⁃jun CHEN. Finite element analysis of hinging octahedron structure withnegative compressibility [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 865-871. |
| [13] | BI Qiu-shi,WANG Guo-qiang,HUANG Ting-ting,MAO Rui,LU Yan-peng. Tooth strength analysis of mineral sizer by coupling discrete element method and finite element method [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1770-1776. |
| [14] | GU Hai-dong,LUO Chun-hong. Experiment on soil arching effect of pit supporting structure with scattered row piles and soil nail wall [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1712-1724. |
| [15] | LIU Guo-zheng, SHI Wen-ku, Chen Zhi-yong. Finite element analysis of transmission error for hypoid gears considering installation error [J]. 吉林大学学报(工学版), 2018, 48(4): 984-989. |
|
||