Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (7): 2099-2108.doi: 10.13229/j.cnki.jdxbgxb.20210981
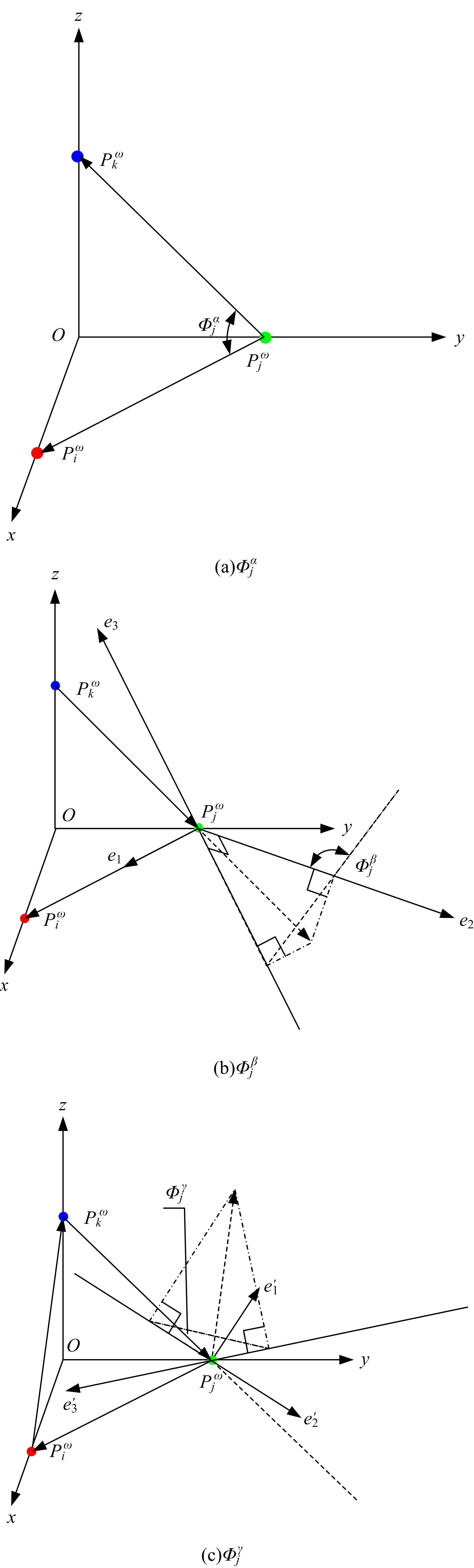
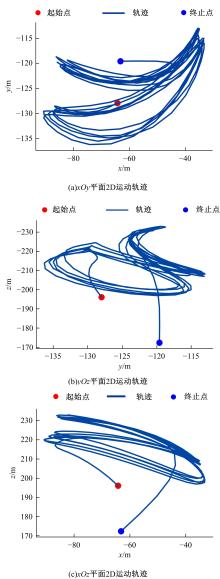
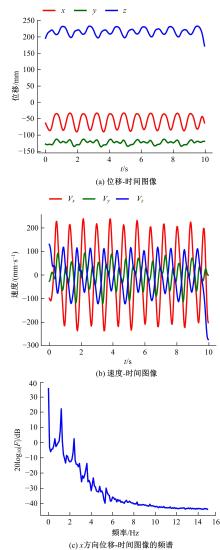
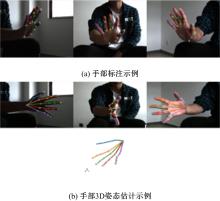
Method for 3D motion parameter measurement based on pose estimation
Lian-ming WANG1( ),Xin WU2
),Xin WU2
- 1.School of Marine Information Engineering,Hainan Tropical Ocean University,Sanya 572022,China
2.School of Physics,Northeast Normal University,Changchun 130024,China
CLC Number:
- TP183















| 1 | Haydari A, Yilmaz Y. Deep reinforcement learning for intelligent transportation systems: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 2 | Ju F, Zhu J, Shao B, et al. CopulaNet: learning residue co-evolution directly from multiple sequence alignment for protein structure prediction[J]. Nature Communications, 2021, 12(1): 1-9. |
| 3 | Hermann J, Schätzle Z, Noé F. Deep-neural-network solution of the electronic Schrödinger equation[J]. Nature Chemistry, 2020, 12(10): 891-897. |
| 4 | Wang T M, Tao Y, Liu H. Current researches and future development trend of intelligent robot: a review[J]. International Journal of Automation and Computing, 2018, 15(5): 525-546. |
| 5 | Zhao H, Wang Z. Motion measurement using inertial sensors, ultrasonic sensors, and magnetometers with extended Kalman filter for data fusion[J]. IEEE Sensors Journal, 2011, 12(5): 943-953. |
| 6 | Zeng H, Zhao Y. Sensing movement: Microsensors for body motion measurement[J]. Sensors, 2011, 11(1): 638-660. |
| 7 | Meinhart C D, Wereley S T, Santiago J G. PIV measurements of a microchannel flow[J]. Experiments in Fluids, 1999, 27(5): 414-419. |
| 8 | Sabel J C. Optical 3D motion measurement[C]∥IEEE Instrumentation and Measurement Technology Conference and IMEKO Tec, Brussels, Belgium, 1996: 367-370. |
| 9 | Eltanany A S, Elwan M S, Amein A S. Key Point Detection Techniques[M]. Cham: Springer International Publishing, 2020: 901-911. |
| 10 | Shapiro L, Stockman G. Computer Vision[M]. Upper Saddle River: Prentice Hall, 2001. |
| 11 | Needham L, Evans M, Cosker D P. The accuracy of several pose estimation methods for 3D joint centre localisation[J]. Scientific Reports, 11(1):No.20673. |
| 12 | Nath T, Mathis A, Chen A C, et al. Using DeepLabCut for 3D markerless pose estimation across species and behaviors[J]. Nature Protocols, 2019, 14(7): 2152-2176. |
| 13 | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770-778. |
| 14 | Howard A, Sandler M, Chu G, et al. Searching for mobilenetv3[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 2019: 1314-1324. |
| 15 | Tan M, Le Q. Efficientnet: rethinking model scaling for convolutional neural networks[C]∥International Conference on Machine Learning, New York, USA 2019: 6105-6114. |
| 16 | Mathis A, Biasi T, Schneider S, et al. Pretraining boosts out-of-domain robustness for pose estimation[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Online, 2021: 1859-1868. |
| 17 | Szeliski R. Computer Vision: Algorithms and Applications[M]. Berlin: Springer Science & Business Media, 2010. |
| 18 | Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| 19 | Karashchuk P, Rupp K L, Dickinson E S, et al. Anipose: a toolkit for robust markerless 3D pose estimation[J]. Cell Reports, 2021, 36(13):No.109730. |
| 20 | Xu Z, Chang X, Xu F, et al. L 1 / 2 regularization: A thresholding representation theory and a fast solver[J]. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(7): 1013-1027. |
| 21 | Triggs B, McLauchlan P F, Hartley R I, et al. Bundle adjustment—a modern synthesis[C]//International Workshop on Vision Algorithms, Berlin, Germany, 1999: 298-372. |
| 22 | Roithmayr C M, Hodges D H. Dynamics: theory and application of Kane's method[J]. Journal of Computational and Nonlinear Dynamics, 2016, 11(6):No. 066501. |
| [1] | Zhen-hai ZHANG,Kun JI,Jian-wu DANG. Crack identification method for bridge based on BCEM model [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1418-1426. |
| [2] | Pei-yong LIU,Jie DONG,Luo-feng XIE,Yang-yang ZHU,Guo-fu YIN. Surface defect detection algorithm of magnetic tiles based on multi⁃branch convolutional neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1449-1457. |
| [3] | Ze-qiang ZHANG,Wei LIANG,Meng-ke XIE,Hong-bin ZHENG. Elite differential evolution algorithm for mixed⁃model two⁃side disassembly line balancing problem [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1297-1304. |
| [4] | Peng YU,Yan PIAO. New method for extracting person re-identification attributes based on multi-scale features [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1155-1162. |
| [5] | Yu JIANG,Jia-zheng PAN,He-huai CHEN,Ling-zhi FU,Hong QI. Segmentation-based detector for traditional Chinese newspaper [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1146-1154. |
| [6] | Zhen-yu WU,Xiao-fei LIU,Yi-pu WANG. Trajectory planning of unmanned system based on DKRRT*⁃APF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 781-791. |
| [7] | Bo TAO,Fu-wu YAN,Zhi-shuai YIN,Dong-mei WU. 3D object detection based on high⁃precision map enhancement [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 802-809. |
| [8] | Shan XUE,Ya-liang ZHANG,Qiong-ying LYU,Guo-hua CAO. Anti⁃unmanned aerial vehicle system object detection algorithm under complex background [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 891-901. |
| [9] | Hong-yang PAN,Zhao LIU,Bo YANG,Geng SUN,Yan-heng LIU. Overview of swarm intelligence methods for unmanned aerial vehicle systems based on new⁃generation information technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 629-642. |
| [10] | Ying HE,Jun-song FAN,Wei WANG,Geng SUN,Yan-heng LIU. Joint optimization of secure communication and trajectory planning in unmanned aerial vehicle air⁃to⁃ground [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 913-922. |
| [11] | Peng GUO,Wen-chao ZHAO,Kun LEI. Dual⁃resource constrained flexible job shop optimal scheduling based on an improved Jaya algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 480-487. |
| [12] | Jin-Zhen Liu,Guo-Hui Gao,Hui Xiong. Multi⁃scale attention network for brain tissue segmentation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 576-583. |
| [13] | Xian-yu QI,Wei WANG,Lin WANG,Yu-fei ZHAO,Yan-peng DONG. Semantic topological map building with object semantic grid map [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 569-575. |
| [14] | Xiao-hu SHI,Jia-qi WU,Chun-guo WU,Shi CHENG,Xiao-hui WENG,Zhi-yong CHANG. Residual network based curve enhanced lane detection method [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 584-592. |
| [15] | Fu-heng QU,Tian-yu DING,Yang LU,Yong YANG,Ya-ting HU. Fast image codeword search algorithm based on neighborhood similarity [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1865-1871. |
|
||