Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (3): 913-922.doi: 10.13229/j.cnki.jdxbgxb20220557
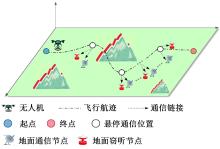
Joint optimization of secure communication and trajectory planning in unmanned aerial vehicle air⁃to⁃ground
Ying HE1( ),Jun-song FAN2,Wei WANG1,Geng SUN2(),Yan-heng LIU1,2
),Jun-song FAN2,Wei WANG1,Geng SUN2(),Yan-heng LIU1,2
- 1.College of Information and Engineering,Changchun University of Finance and Economics,Changchun 130122,China
2.College of Software,Jilin University,Changchun 130012,China
CLC Number:
- TP393








| 1 | 鲜斌, 张诗婧, 韩晓薇, 等.基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报: 工学版, 2021, 51(6): 2259-2267. |
| Xian Bin, Zhang Shi-jing, Han Xiao-wei, et al. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2259-2267. | |
| 2 | Zeng Y, Wu Q, Zhang R. Accessing from the sky: a tutorial on UAV communications for 5G and beyond[J]. Proceedings of the IEEE, 2019, 107(12): 2327-2375. |
| 3 | Zhang G, Wu Q, Cui M, et al. Securing UAV communications via joint trajectory and power control[J]. IEEE Transactions on Wireless Communications, 2019, 18(2): 1376-1389. |
| 4 | Li A, Wu Q, Zhang R. UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel[J]. IEEE Wireless Communications Letters, 2018, 8(1): 181-184. |
| 5 | 陈谋, 肖健, 姜长生.基于改进蚁群算法的无人机三维航路规划[J]. 吉林大学学报: 工学版, 2008, 38(4):991-995. |
| Chen Mou, Xiao Jian, Jiang Chang-sheng. Three dimensional path planning of UAV with improved ant algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2008, 38(4): 991-995. | |
| 6 | Chen H, Lu P, Xiao C. Dynamic obstacle avoidance for UAVs using a fast trajectory planning approach[C]∥2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 2019: 1459-1464. |
| 7 | Choi H H, Rubenecia A, Contreras P V, et al. Collision avoidance scheme for micro UAVs delivering information[C]∥2016 International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia, 2016: 45-50. |
| 8 | Yin C, Xiao Z, Cao X, et al. Offline and online search: UAV multiobjective path planning under dynamic urban environment[J]. IEEE Internet of Things Journal, 2017, 5(2): 546-558. |
| 9 | Zeng Y, Xu J, Zhang R. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329-2345. |
| 10 | Li J, Kang H, Sun G, et al. Physical layer secure communications based on collaborative beamforming for UAV networks: a multi-objective optimization approach[C]∥IEEE Conference on Computer Communications, Vancouver, BC, Canada, 2021: 1-10. |
| 11 | Shao S, Peng Y, He C, et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97: 415-430. |
| 12 | Deb K, Jain H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part i: solving problems with box constraints[J]. IEEE Transactions on Evolutionary Computation, 2013, 18(4): 577-601. |
| 13 | Kasturi K, Nayak C K, Nayak M R. Electric vehicles management enabling G2V and V2G in smart distribution system for maximizing profits using MOMVO[J]. International Transactions on Electrical Energy Systems, 2019, 29(6): e12013. |
| 14 | Jain A, Lalwani S, Lalwani M. A comparative analysis of MOPSO, NSGA-II, SPEA2 and PESA2 for multi-objective optimal power flow[C]∥2018 2nd International Conference on Power, Energy and Environment: Towards Smart Technology (ICEPE), Shillong, India, 2018: 1-6. |
| 15 | 朱文强, 杨卫莉, 库硕, 等. 基于SPEA2算法的UCAV多目标机动轨迹规划[J]. 无人系统技术,2019, 2(6): 23-33. |
| Zhu Wen-qiang, Yang Wei-li, Ku Shuo, et al. Multi-objective maneuvering trajectory planning based on SPEA2 algorithm for UCAV[J]. Unmanned Systems Technology, 2019, 2(6): 23-33. |
| [1] | Shan XUE,Ya-liang ZHANG,Qiong-ying LYU,Guo-hua CAO. Anti⁃unmanned aerial vehicle system object detection algorithm under complex background [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 891-901. |
| [2] | Zhen-yu WU,Xiao-fei LIU,Yi-pu WANG. Trajectory planning of unmanned system based on DKRRT*⁃APF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 781-791. |
| [3] | Bo TAO,Fu-wu YAN,Zhi-shuai YIN,Dong-mei WU. 3D object detection based on high⁃precision map enhancement [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 802-809. |
| [4] | Hong-yang PAN,Zhao LIU,Bo YANG,Geng SUN,Yan-heng LIU. Overview of swarm intelligence methods for unmanned aerial vehicle systems based on new⁃generation information technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 629-642. |
| [5] | Bao-feng SUN,Tian-zi YAO,Yu-qi CHEN. Electric delivery vehicle routing problem optimization model with time⁃varying traffic congestion [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 468-479. |
| [6] | Peng GUO,Wen-chao ZHAO,Kun LEI. Dual⁃resource constrained flexible job shop optimal scheduling based on an improved Jaya algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 480-487. |
| [7] | Jin-Zhen Liu,Guo-Hui Gao,Hui Xiong. Multi⁃scale attention network for brain tissue segmentation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 576-583. |
| [8] | Xiao-hu SHI,Jia-qi WU,Chun-guo WU,Shi CHENG,Xiao-hui WENG,Zhi-yong CHANG. Residual network based curve enhanced lane detection method [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 584-592. |
| [9] | Xian-yu QI,Wei WANG,Lin WANG,Yu-fei ZHAO,Yan-peng DONG. Semantic topological map building with object semantic grid map [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 569-575. |
| [10] | Han-wu LIU,Yu-long LEI,Xiao-feng YIN,Yao FU,Xing-zhong LI. Multi⁃point control strategy optimization for auxiliary power unit of range⁃extended electric vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1741-1750. |
| [11] | Feng-feng ZHOU,Hai-yang ZHU. SEE: sense EEG⁃based emotion algorithm via three⁃step feature selection strategy [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1834-1841. |
| [12] | Fu-heng QU,Tian-yu DING,Yang LU,Yong YANG,Ya-ting HU. Fast image codeword search algorithm based on neighborhood similarity [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1865-1871. |
| [13] | Tian BAI,Ming-wei XU,Si-ming LIU,Ji-an ZHANG,Zhe WANG. Dispute focus identification of pleading text based on deep neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1872-1880. |
| [14] | Gui-he QIN,Jun-feng HUANG,Ming-hui SUN. Text input based on two⁃handed keyboard in virtual environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1881-1888. |
| [15] | Wei ZHANG,Shu-pei ZHANG,Chong-en LUO,Sheng ZHANG,Guo-lin WANG. Collision avoidance trajectory planning for intelligent vehicles in emergency conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1515-1523. |
|
||