Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (12): 2852-2863.doi: 10.13229/j.cnki.jdxbgxb20210457
Previous Articles Next Articles
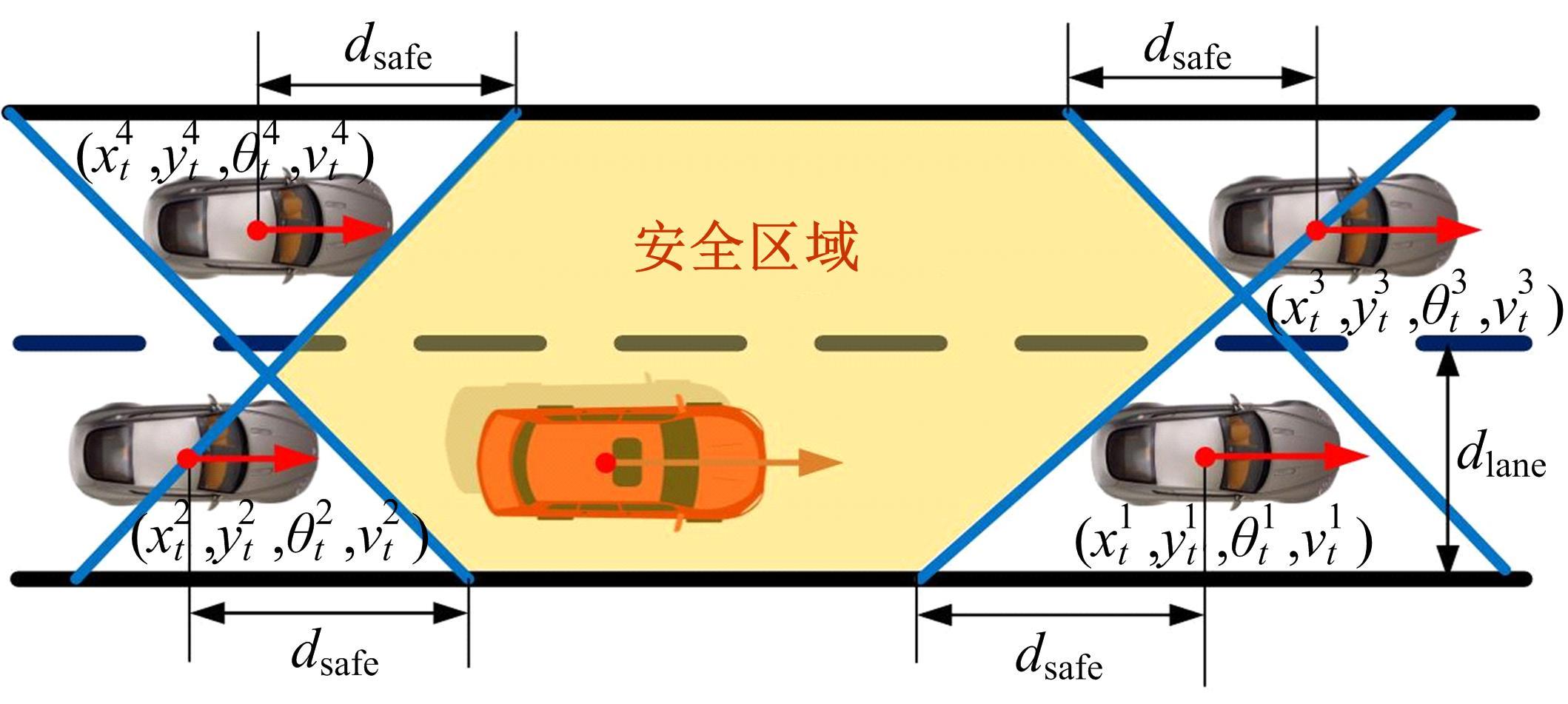
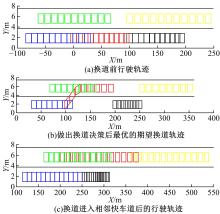
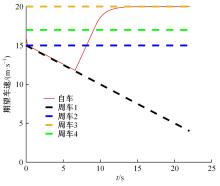
Optimization⁃based lane changing trajectory planning approach for autonomous vehicles on two⁃lane road
Hao-nan PENG1( ),Ming-huan TANG1,Qi-wen ZHA1,Wei-zhong WANG1(),Wei-da WANG2,Chang-le XIANG2,Yu-long LIU3
),Ming-huan TANG1,Qi-wen ZHA1,Wei-zhong WANG1(),Wei-da WANG2,Chang-le XIANG2,Yu-long LIU3
- 1.China Academy of Industrial Internet,Beijing 100102,China
2.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China
3.School of Vehicle and Mobility,Tsinghua University,Beijing 100084,China
CLC Number:
- U461.1











| 1 | Peng Hao-nan, Wang Wei-da, An Quan, et al. Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent-drive vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6053-6066. |
| 2 | Xiang Chang-le, Peng Hao-nan, Wang Wei-da, et al. Path tracking coordinated control strategy for autonomous four in-wheel-motor independent-drive vehicles with consideration of lateral stability[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(4): 1023-1036. |
| 3 | Sun L, Cheng P, Tomizuka M, et al. A Fast integrated planning and control framework for autonomous driving via imitation learning[C]∥Proceedings of the ASME 2018 Dynamic Systems and Control Conference, Atlanta, Georgia, USA, 2018: 1-11. |
| 4 | Noh S. Decision-making framework for autonomous driving at road intersections: safeguarding against collision, overly conservative behavior, and violation vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3275-3286. |
| 5 | 宋威龙. 城区动态环境下智能车辆行为决策研究[D]. 北京:北京理工大学机械与车辆学院, 2016. |
| Song Wei-long. Research on behavioral decision making for intelligent vehicles in dynamic urban environments[D]. Beijing: School of Mechanical Engineering, Beijing Institute of Technology, 2016. | |
| 6 | 何祥坤. 自动驾驶汽车紧急避撞系统的运动控制与决策方法研究[D]. 北京:清华大学车辆与运载学院, 2018. |
| He Xiang-kun, Research on motion control and decision-making method of emergency collision avoidance system for autonomous vehicle[D]. Beijing: School of Vehicle and Mobility, Tsinghua University, 2018. | |
| 7 | Furda A, Vlacic L. Enabling safe autonomous driving in real-world city traffic using multiple criteria decision making[J]. IEEE Intelligent Transportation Systems Magazine, 2011, 3(1): 4-17. |
| 8 | Huang Z, Xu X, He H, et al. Parameterized batch reinforcement learning for longitudinal control of autonomous land vehicles[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(4): 730-741. |
| 9 | 王娟, 朱庆保, 崔靖. 复杂环境下基于贝叶斯决策的机器人路径规划[J]. 计算机工程与应用, 2012, 48(2): 245-248. |
| Wang Juan, Zhu Qing-bao, Cui Jing. Robot path planning based on Bayes decision in complex environment[J]. Computer Engineering and Application, 2012, 48(2): 245-248. | |
| 10 | 赵志成,华一丁,王文扬,等. 智能车辆驾驶行为决策方法研究[J]. 现代信息科技, 2019, 3(24): 191-193. |
| Zhao Zhi-cheng, Hua Yi-ding, Wang Wen-yang, et al. Research on intelligent vehicle driving behavior decision-making method[J]. Modern Information Technology, 2019, 3(24): 191-193. | |
| 11 | Zong X, Xu G, Yu G, et al. Obstacle avoidance for self-driving vehicle with reinforcement learning[J]. SAE International Journal of Passenger Cars-Electronic and Electrical Systems, 2017, 11(1): 28-37. |
| 12 | 惠飞, 穆柯楠, 赵祥模. 基于动态概率网格和贝叶斯决策网络的车辆变道辅助驾驶决策方法[J]. 交通运输工程学报, 2018, 18(2): 148-158. |
| Hui Fei, Mu Ke-nan, Zhao Xiang-mo. Assistant driving decision method of vehicle lane change based on dynamic probability grid and Bayesian decision network[J]. Journal of Transportation Engineering, 2018, 18(2): 148-158. | |
| 13 | 孙浩, 邓伟文, 张素民, 等. 考虑全局最优性的汽车微观动态轨迹规划[J]. 吉林大学学报:工学版, 2014, 44(4): 918-924. |
| Sun Hao, Deng Wei-wen, Zhang Su-min, et al. Micro vehicle dynamic trajectory plan with global optimality[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(4): 918-924. | |
| 14 | 边明远. 基于紧急变道策略的汽车主动避障安全车距模型[J]. 重庆理工大学学报:自然科学, 2012, 26(4): 1-4. |
| Bian Ming-yuan. A vehicle safety distance model for collision avoidance system based on emergency lane change motion[J]. Journal of Chongqing University of Technology(Natural Science), 2012, 26(4): 1-4. | |
| 15 | Ardakani M K, Tavana M. A decremental approach with the A* algorithm for speeding-up the optimization process in dynamic shortest path problems[J]. Measurement, 2015, 60: 299-307. |
| 16 | Kuwata Y, Teo J, Fiore G, et al. Real-time motion planning with applications to autonomous urban driving[J]. IEEE Transactions on Control Systems Technology, 2009, 17(5): 1105-1118. |
| 17 | Madås D, Nosratinia M, Keshavarz M, et al. On path planning methods for automotive collision avoidance[C]∥2013 IEEE Intelligent Vehicles Symposium, Gold Coast City, QLD, Australia, 2013: 931-937. |
| 18 | Ali M, Gray A, Gao Y, et al. Multi-objective collision avoidance[C]∥ASME 2013 Dynamic Systems and Control Conference, Palo Alto, California, USA, 2013: No. V003T47A004. |
| 19 | Ji J, Khajepour A, Melek W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2016, 66(2): 952-964. |
| 20 | Dixit S, Montanaro U, Dianati M,et al. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(6): 2310-2323. |
| 21 | Rajamani R. Vehicle Dynamics and Control[M]. Berlin: Springer Science & Business Media, 2011. |
| [1] | Wei ZHANG,Shu-pei ZHANG,Chong-en LUO,Sheng ZHANG,Guo-lin WANG. Collision avoidance trajectory planning for intelligent vehicles in emergency conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1515-1523. |
| [2] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [3] | Fu-chun JIA,Xian-jie MENG,Yu-long LEI. Optimal design of two degrees of freedom dynamic vibration absorber based on multi-objective genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1969-1976. |
| [4] | Qing⁃ying LAI,Jun LIU,Ruo⁃yu ZHAO,Yong⁃ji LUO,Ling⁃yun MENG,Ya⁃zhi XU. Optimal trajectory planning for middle⁃to⁃high speed maglev based on dynamic programming with mutative spacing [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 749-756. |
| [5] | ZHANG Lin, ZHANG Xin-jie, GUO Kong-hui, WANG Chao, LIU Yang, LIU Tao. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment [J]. 吉林大学学报(工学版), 2018, 48(3): 652-660. |
| [6] | QU Xing-tian, YAN Long-wei, SUN Hui-chao, ZHOU Wei, LI Guang-hui. Structure analysis of 3D printer device of reversible working platform [J]. 吉林大学学报(工学版), 2017, 47(5): 1489-1497. |
| [7] | CAO Fu-cheng, XING Xiao-xue, LI Yuan-chun, ZHAO Xi-lu. Adaptive trajectory sliding mode impedance control for lower limb rehabilitation robot [J]. 吉林大学学报(工学版), 2016, 46(5): 1602-1608. |
| [8] | GUAN Cheng, WANG Fei, ZHANG Deng-yu. NURBS-based time-optimal trajectory planning on robotic excavators [J]. 吉林大学学报(工学版), 2015, 45(2): 540-546. |
| [9] | MIAO Dong-jing,WU Liao,XU Jing,CHEN Ken,XIE Ying,LIU Zhi. Automatic spraying robot system for aircraft surfaces and spraying operation planning [J]. 吉林大学学报(工学版), 2015, 45(2): 547-553. |
| [10] | SUN Hao, DENG Wei-wen, ZHANG Su-min, WU Meng-xun. Micro vehicle dynamic trajectory plan with global optimality [J]. 吉林大学学报(工学版), 2014, 44(4): 918-924. |
| [11] | SHI Wen-xiao,ZHAO Song,FAN Shao-shuai,SUN Chao. Multi-objective decision making based access selection algorithmin heterogeneous wireless networks [J]. 吉林大学学报(工学版), 2011, 41(03): 795-800. |
| [12] | LI Yan-hong,YUAN Zhen-zhou,CHEN Jing-yun,TIAN Meng. Combined capacity optimization of comprehensive transportation corridor based on multi-objective decision making [J]. 吉林大学学报(工学版), 2009, 39(06): 1480-1485. |
| [13] | DENG Zong-quan,HOU Xu-yan,GAO Hai-bo,HU Ming . Multi-attribute decision making on the path of rocker rover based on converted motion control [J]. 吉林大学学报(工学版), 2008, 38(04): 930-935. |
|