Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (5): 1443-1458.doi: 10.13229/j.cnki.jdxbgxb.20220742
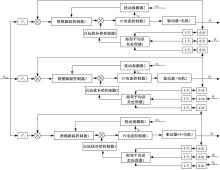
A novel sliding mode control strategy of multi-motor for robot arm based on position tracking
Hong-zhi WANG( ),Ting-ting WANG(),Miao-miao LAN,Shuo XU
),Ting-ting WANG(),Miao-miao LAN,Shuo XU
- School of Computer Science and Engineering,Changchun University of Technology,Changchun 130012,China
CLC Number:
- TP273














| 1 | Aljalal M, Ibrahim S, Djemal R, et al. Comprehensive review on brain-controlled mobile robots and robotic arms based on electroencephalography signals[J]. Intelligent Service Robotics, 2020, 13(4): 539-563. |
| 2 | Grushko S, Vysock A, Oádal P, et al. Improved mutual understanding for human-robot collaboration: combining human-aware motion planning with haptic feedback devices for communicating panned trajectory[J]. Sensors, 2021, 21(11): No.21113673. |
| 3 | 刘克平, 秦悦, 杨宏韬, 等. 多轴工业机器人非线性环形耦合补偿同步控制[J]. 机械科学与技术, 2018, 37(6): 910-914. |
| Liu Ke-ping, Qin Yue, Yang Hong-tao, et al. Nonlinear ring coupling compensation synchronization control for multi-axis industrial robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(6): 910-914. | |
| 4 | Cordeiro A, Manuel J, Pires V F. Performance of synchronized master-slave closed-loop control of AC electric drives using real time motion over ethernet (RTMoE)[J]. Mechatronics, 2020, 69(4): No.102400. |
| 5 | 杨小庆, 赵振华. 多电机机器人模糊PID控制仿真研究[J]. 中国工程机械学报, 2020, 18(3): 248-252. |
| Yang Xiao-qing, Zhao Zhen-hua. Simulation of fuzzy-PID control for multi-motor robot[J]. Chinese Journal of Construction Machinery, 2020, 18(3): 248-252. | |
| 6 | Li Z, Zhang Q, An J, et al. Cross-coupling control method of the two-axis linear motor based on second-order terminal sliding mode[J]. Journal of Mechanical Science and Technology, 2022, 36(3): 1485-1495. |
| 7 | 赵宏英, 曾彦, 廖丽. 基于改进交叉耦合的多永磁同步电机速度同步控制[J]. 机床与液压, 2021, 49(22): 44-51. |
| Zhao Hong-ying, Zeng Yan, Liao Li. Speed synchronous control of multiple permanent magnet synchronous motors based on an improved cross-coupling structure[J]. Machine Tool & Hydraulics, 2021, 49(22): 44-51. | |
| 8 | Deng Z, Shang J, Nian X. Synchronization controller design of two coupling permanent magnet synchronous motors system with nonlinear constraints[J]. ISA Transac Tions, 2015, 59: 243-255. |
| 9 | Sun D, Mills J K. Adaptive synchronized control for coordination of multirobot assembly tasks[J]. IEEE Transactions on Robotics and Automation, 2002, 18(4): 498-510. |
| 10 | 刘玉强, 徐为民, 张梦杰, 等. 关于多电机位置同步优化控制仿真研究[J]. 计算机仿真, 2016, 33(11): 369-374. |
| Liu Yu-qiang, Xu Wei-ming, Zhang Meng-jie, et al. Simulation research on optimal control of multi motor position synchronization[J]. Computer Simulation, 2016, 33(11): 369-374. | |
| 11 | Perez-Pinal F J, Calderon G, Araujo-Vargas I. Relative coupling strategy[C]∥IEEE International Electric Machines and Drives Conference, Madison, USA, 2003: 1162-1166. |
| 12 | Zhang C, Xiao M, He J. Multimotor improved relative coupling cooperative control based on sliding-mode controller[J]. Mathematical Problems in Engineering, 2020, 2020(23): 1-10. |
| 13 | Shi T, Hao L, Qiang G, et al. An improved relative coupling control structure for multi-motor speed synchronous driving system[J]. IET Electric Power Applications, 2016, 10(6): 451-457. |
| 14 | Lorenz R D, Schmidt P B. Synchronized motion control for process automation[C]∥IEEE Conference Record of the Industry Applications Society Annual Meeting, San Diego, USA, 1989: 1693-1698. |
| 15 | Payette K. The virtual shaft control algorithm for synchronized motion control[C]∥IEEE Proceedings of the 1998 American Control Conference, Philadelphia, USA, 1998: 3008-3012. |
| 16 | Zhang C, Xiao M, He J, et al. Collaborative control of multimotor systems for fixed-time optimisation based on virtual main-axis speed compensation structure[J]. Complexity, 2021, 2021:1-15. |
| 17 | 鲁文儒. 多关节机械臂同步控制策略研究[D]. 兰州: 兰州交通大学自动化与电气工程学院, 2021. |
| Lu Wen-ru. Research on synchronous control strategy of multi-joint manipulator[D]. Lanzhou: School of Automation and Electrical Engineering of Lanzhou Jiaotong University, 2021. | |
| 18 | Liu R, Sun J Z, Luo Y Q, et al. Research on multi-motor synchronization control based on the ring coupling strategy for cutter head driving system of shield machines[J]. Applied Mechanics & Materials, 2011, 52: 65-72. |
| 19 | Wu Y, Cheng Y, Wang Y. Research on a multi-motor coordinated control strategy based on fuzzy ring network control[J]. IEEE Access, 2020, 8: 39375-39388. |
| 20 | Sun D. Position synchronization of multiple motion axes with adaptive coupling control[J]. Automatica, 2003, 39(6): 997-1005. |
| 21 | 丁威, 杜钦君, 宋传明, 等. 均值耦合多电机滑模速度同步控制[J]. 西安交通大学学报, 2022, 56(2): 159-170. |
| Ding Wei, Du Qin-jun, Song Chuan-ming, et al. A synchronous control method for mean-coupled sliding mode speed of multi-motor [J]. Journal of Xi 'an Jiaotong University, 2022, 56(2): 159-170. | |
| 22 | 张润梅, 罗谷安, 袁彬, 等. 多关节机械臂干扰观测器的自适应滑模控制[J]. 机械科学与技术, 2021, 40(10): 1595-1602. |
| Zhang Run-mei, Luo Gu-an, Yuan Bin, et al. Adaptive sliding mode control of disturbance observer for multi joint manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(10): 1595-1602. | |
| 23 | 贺志浩, 于海生. 基于自抗扰与观测器的环形耦合多电机协调滑模控制[J]. 微电机, 2021, 54(4): 48-55. |
| He Zhi-hao, Yu Hai-sheng. Coordinated sliding mode control of ring-coupled multi-motor based on active disturbance rejection and observer[J]. Micromotors, 2021, 54(4): 48-55. | |
| 24 | 周挺, 徐宇工, 吴斌. 球形机器人的自适应分数阶PIλDμ滑模速度控制方法[J]. 吉林大学学报: 工学版, 2021, 51(2): 728-737. |
| Zhou Ting, Xu Yu-gong, Wu Bin. Adaptive fractional PIλDμ sliding mode control method for speed control of spherical robot[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 728-737. | |
| 25 | Vanchinathan K, Selvaganesan N. Adaptive fractional order PID controller tuning for brushless DC motor using artificial bee colony algorithm[J]. Results in Control and Optimization, 2021, 4(4): No.100032. |
| 26 | 吴伟, 曾庆军, 王阳, 等. 水下机器人多电机协同模糊滑模控制研究[J]. 中国测试, 2021, 47(11): 101-106. |
| Wu Wei, Zeng Qing-jun, Wang Yang, et al. Research on fuzzy sliding mode control of multi motor cooperative underwater robot[J]. China Measurement & Test, 2021, 47(11): 101-106. |
| [1] | Jun ZHAO,Zi-liang ZHAO,Qing-lin ZHU,Bin GUO. Output⁃feedback robust control of uncertain systems without observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 828-835. |
| [2] | Guo-yuan QI,Hao CHEN. Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 810-822. |
| [3] | Long-long CHEN,Tian-yu FENG,Zong-yang LYU,Yu-hu WU. Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 883-890. |
| [4] | Guo-yuan QI,Kuo LI,Kun WANG. Attitude constrained control of quadrotor unmanned aerial vehicle based on compensation function observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 853-862. |
| [5] | Hong-yan GUO,Wen-ya YU,Jun LIU,Qi-kun DAI. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 693-703. |
| [6] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [7] | Zhuo-jun XU,Yao-xiang WANG,Xing HUANG,Cheng PENG. Ground moving target search and location with multi⁃unmanned aerial vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 832-840. |
| [8] | De-feng HE,Dan ZHOU,Jie LUO. Efficient cooperative predictive control of predecessor⁃following vehicle platoons with guaranteed string stability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 726-734. |
| [9] | Yan MA,Ze-xuan GUO. SoE estimation of lithium-ion batteries based on improved BPNN-MPF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 263-272. |
| [10] | Hong-zhi WANG,Ting-ting WANG,Huang-shui HU,Xiao-fan LU. PID control based on BP neural network optimized by Q⁃learning for speed control of BLDCM [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2280-2286. |
| [11] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
| [12] | Yan MA,Jian-fei HUANG,Hai-yan ZHAO. Method of vehicle formation control based on vehicle to vehicle communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 711-718. |
| [13] | DENG Li-fei, SHI Yao-wu, ZHU Lan-xiang, YU Ding-li. Failure detection of closed-loop systems and application to SI engines [J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
|
||