Journal of Jilin University(Engineering and Technology Edition) ›› 2026, Vol. 56 ›› Issue (1): 21-30.doi: 10.13229/j.cnki.jdxbgxb.20240682
Previous Articles Next Articles
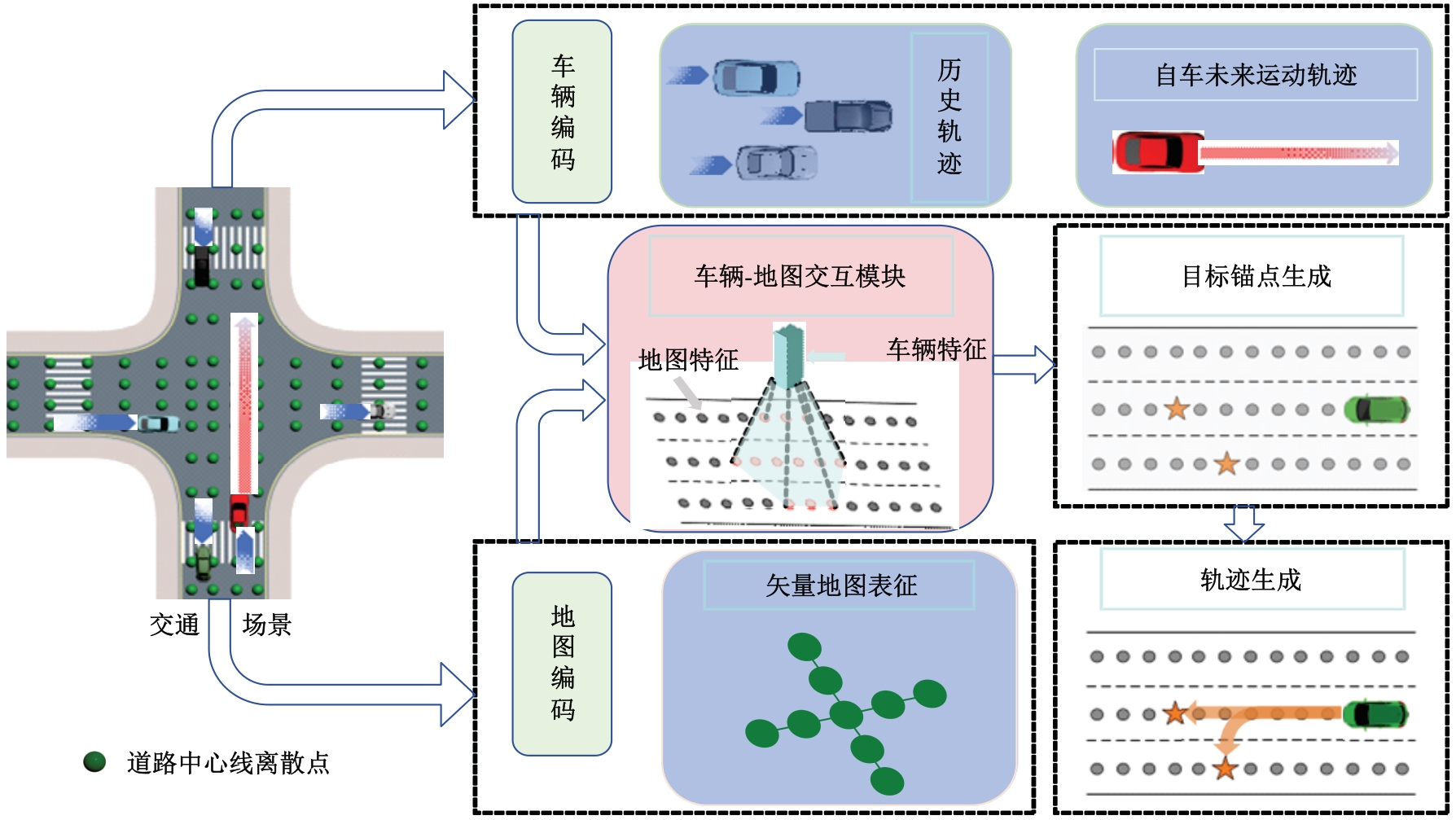
Multimodal trajectory prediction based on target anchor-driven
Zhen-hai GAO( ),Ming-xi BAO,Rui ZHAO,Ming-hong TANG,Fei GAO()
),Ming-xi BAO,Rui ZHAO,Ming-hong TANG,Fei GAO()
- National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
CLC Number:
- U463





| [1] | Huang Y, Du J, Yang Z, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 652-674. |
| [2] | Gao Z, Bao M, Cui T, et al. Collision risk assessment for intelligent vehicles considering multi-dimensional uncertainties[J]. IEEE Access, 2024, 12: 57780-57795. |
| [3] | 高镇海, 鲍明喜, 高菲, 等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152, 1162. |
| Gao Zhen-hai, Bao Ming-xi, Gao Fei, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J].Automotive Engineering, 2023, 45(7): 1145-1152, 1162. | |
| [4] | Gao Z H, Bao M X, Gao F, et al. Probabilistic multi-modal expected trajectory prediction based on LSTM for autonomous driving[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2023,238(9): 2817-2828. |
| [5] | Jia X, Wu P, Chen L, et al. HDGT: heterogeneous driving graph transformer for multi-agent trajectory prediction via scene encoding[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(11): 13860-13875. |
| [6] | Deo N, Trivedi M M. Convolutional social pooling for vehicle trajectory prediction[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops(CVPRW), Salt Lake City, USA, 2018: 1581-1589. |
| [7] | Cai Y, Wang Z, Wang H, et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11216-11227. |
| [8] | Zhong Z, Luo Y, Liang W. STGM: vehicle trajectory prediction based on generative model for spatial-temporal features[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18785-18793. |
| [9] | Deo N, Trivedi M M. Multi-modal trajectory prediction of surrounding vehicles with maneuver based LSTMs[C]∥IEEE Intelligent Vehicles Symposium (IV),Changshu, China, 2018:1179-1184. |
| [10] | Wang Y, Wang J, Jiang J, et al. SA-LSTM: a trajectory prediction model for complex off-road multi-agent systems considering situation awareness based on risk field[J]. IEEE Transactions on Vehicular Technology, 2023, 72(11): 14016-14027. |
| [11] | Lin L, Li W, Bi H, et al. Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(2): 197-208. |
| [12] | Wu Z, Pan S, Chen F, et al. A comprehensive survey on graph neural networks[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 4-24. |
| [13] | Zhou J, Cui G, Hu S, et al. Graph neural networks: a review of methods and applications[J]. AI Open, 2020, 1(1): 57-81. |
| [14] | Gilles T, Sabatini S, Tsishkou D, et al. GOHOME: graph-oriented heatmap output for future motion estimation[C]∥International Conference on Robotics and Automation(ICRA),Philadelphia, USA, 2022: 9107-9114. |
| [15] | Gilles T, Sabatini S, Tsishkou D, et al. HOME: heatmap output for future motion estimation[C]∥IEEE International Intelligent Transportation Systems Conference(ITSC), Indianapolis, USA,2021: 500-507. |
| [16] | Hong J, Sapp B, Phibin J. Rules of the road: predicting driving behavior with a convolutional model of semantic interactions[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR),Long Beach, USA, 2019: 8446-8454 . |
| [17] | Zhang L, Li P, Chen J, et al. Trajectory prediction with graph-based dual-scale context fusion[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Kyoto, Japan,2022: 11374-11381 . |
| [18] | Gu J, Sun C, Zhao H. DenseTNT: end-to-end trajectory prediction from dense goal sets[C]∥IEEE/CVF International Conference on Computer Vision (ICCV), Online,2021:15283-15292. |
| [19] | Liang M, Yang B, Hu R, et al. LaneGCN:learning lane graph representations for motion forecasting[C]∥ The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 541-556. |
| [20] | Song H, Ding W, Chen Y, et al. PiP: planning-informed trajectory prediction for autonomous driving[C]∥The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 598-614. |
| [21] | Guo H, Meng Q, Cao D, et al. Vehicle trajectory prediction method coupled with ego vehicle motion trend under dual attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement,2022, 71: 1-16. |
| [22] | Zhang L, Su P H, Hoang J, et al. Map-adaptive goal-based trajectory prediction[J/OL].[2024-05-26].. |
| [23] | Zhao H, Gao J, Lan T, et al. TNT: Target-driveN trajectory prediction[C]∥IEEE Conference on Robot Learning,London, UK,2021: 895-904. |
| [24] | Chang M F, Ramanan D, Hays J, et al. Argoverse: 3D tracking and forecasting with rich maps[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR), Long Beach, USA,2019:8740-8749. |
| [25] | Gilles T, Sabatini S, Tsishkou D, et al. THOMAS: trajectory heatmap output with learned multi-agent sampling[J/OL].[2024-05-26].. |
| [1] | Xiang-wen ZHANG,Zi-hao WANG. Electro-hydraulic coordinated control strategy for braking mode switching process of electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2026, 56(1): 31-43. |
| [2] | Wei LAN,Zheng ZHOU,Guan-yu WANG,Wei WANG,Miao-miao ZHANG. Intelligent fitting method for vehicle design based on machine learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2858-2863. |
| [3] | Bing ZHU,Peng-xiang MENG,Bin LIU,Jia-yi HAN,Jian ZHAO,Zhi-cheng CHEN,Dong-jian SONG,Xiao-wen TAO. Virtual lane lines fitting method based on traffic environment information [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2935-2945. |
| [4] | Shou-tao LI,Xiang-yi JIA,Jun ZHU,Hong-yan GUO,Ding-li YU. Uncontrolled intersections decision⁃making method for intelligent driving vehicles based on Level⁃K [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 3069-3078. |
| [5] | Gui-shen YU,Xin CHEN,Yue TANG,Chun-hui ZHAO,Ai-jia NIU,Hui CHAI,Jing-xin NA. Effect of laser surface treatment on the shear strength of aluminum-aluminum bonding joints [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2555-2569. |
| [6] | Jun-wu ZHAO,Ting QU,Yun-feng HU. Trajectory planning for intelligent vehicles based on adaptive sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2802-2816. |
| [7] | Jin-wu GAO,Shao-long SUN,Shun-yao WANG,Bing-zhao GAO. Speed fluctuation suppression strategy of range extender based on motor torque compensation [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2475-2486. |
| [8] | Rui ZHAO,Qi-rui YUAN,Jia-jun LIAN,Fei GAO,Hong-yu HU,Zhen-hai GAO. Intelligent vehicle collision risk assessment considering dual uncertainties [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2597-2610. |
| [9] | Mei-xia JIA,Jian-jun HU,Feng XIAO. Multi⁃physics simulation method of vehicle motor under varying working conditions based on multi⁃software combination [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1862-1872. |
| [10] | Xue-wei SONG,Ze-ping YU,Yang XIAO,De-ping WANG,Quan YUAN,Xin-zhuo LI,Jia-wen ZHENG. Research progress on the performance changes of lithium⁃ion batteries after aging [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1817-1833. |
| [11] | Chun XIAO,Zi-chun YI,Bing-yin ZHOU,Shao-rui ZHANG. Fuzzy energy management strategy of fuel cell electric vehicle based on improved pigeon⁃inspired optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1873-1882. |
| [12] | Jian WANG,Chen-wei JIA. Trajectory prediction model for intelligent connected vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1963-1972. |
| [13] | Wei-dong LI,Cao-yuan MA,Hao SHI,Heng CAO. An automatic driving decision control algorithm based on hierarchical reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1798-1805. |
| [14] | Dang LU,Yan-ru SUO,Yu-hang SUN,Hai-dong WU. Estimation of tire camber and sideslip combined mechanical characteristics based on dimensionless expression [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1516-1524. |
| [15] | Zhen-hai GAO,Cheng-yuan ZHENG,Rui ZHAO. Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1142-1162. |
|
||