Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (9): 2935-2945.doi: 10.13229/j.cnki.jdxbgxb.20240526
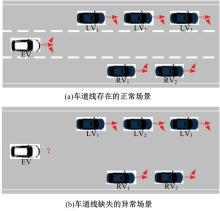
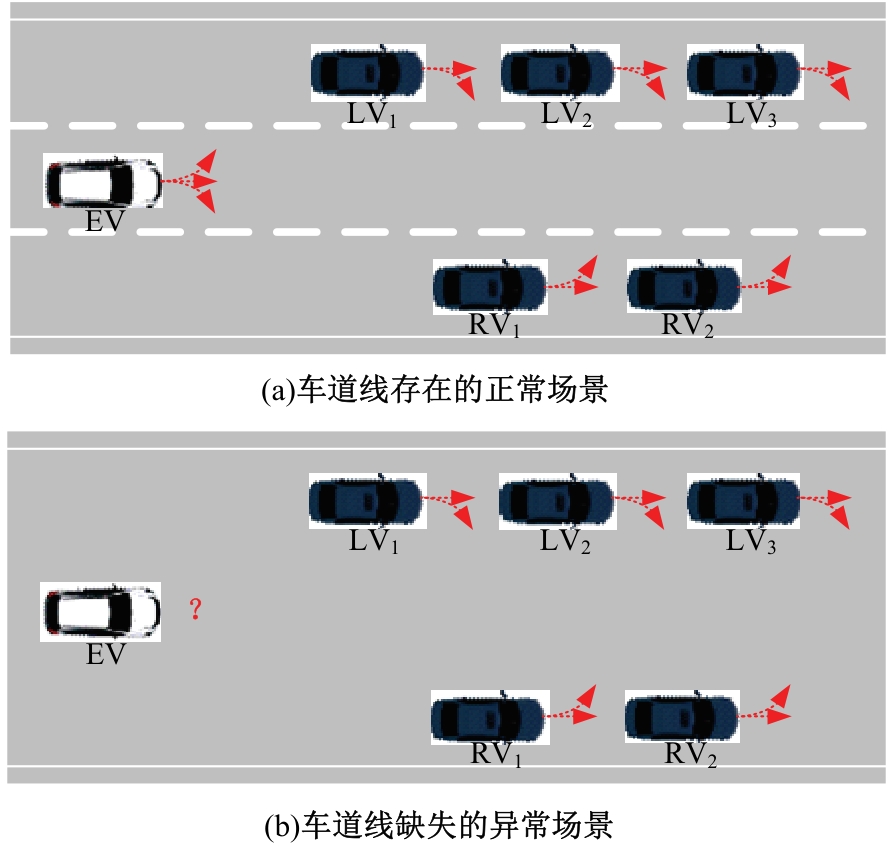
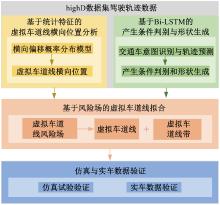
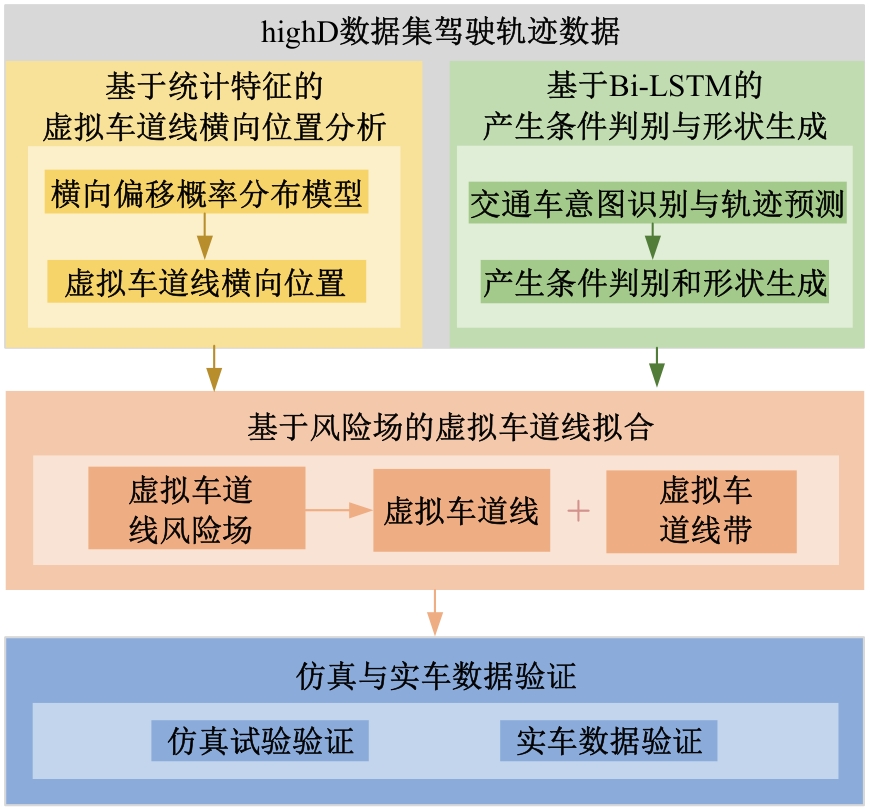
Virtual lane lines fitting method based on traffic environment information
Bing ZHU1( ),Peng-xiang MENG1,Bin LIU2,Jia-yi HAN1(),Jian ZHAO1,Zhi-cheng CHEN1,Dong-jian SONG1,Xiao-wen TAO1
),Peng-xiang MENG1,Bin LIU2,Jia-yi HAN1(),Jian ZHAO1,Zhi-cheng CHEN1,Dong-jian SONG1,Xiao-wen TAO1
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.China FAW Group Co. ,Ltd. ,Changchun 130013,China
CLC Number:
- U463.6


| [1] | 蒋一国. 基于GAN的车道线检测算法研究[D]. 长春: 吉林大学计算机科学与技术学院, 2020. |
| Jiang Yi-guo. Research on lane detection based on GAN[D]. Changchun: College of Computer Science and Technology, Jilin University,2020. | |
| [2] | 邓天民, 谢鹏飞, 余洋, 等. 双分支特征自适应融合的车道线检测方法[J/OL]. [2024-05-03]. |
| Deng Tian-min, Xie Peng-fei, Yu Yang, et al. Method of lane detection based on adaptive fusion of double branch features[J/OL]. [2024-05-03]. | |
| [3] | Tabelini L, Berriel R, Paixao T M, et al. Keep your eyes on the lane: Real-time attention-guided lane detection[J/OL]. [2024-05-03] |
| [4] | John V, Karunakaran N M, Guo C Z, et al. Free space, visible and missing lane marker estimation using the PsiNet and extra trees regression[C]∥2018 24th International Confernece on Pattern Recognition, Beijing, China, 2018: 189-194. |
| [5] | John V, Liu Z, Guo C Z, et al. Real-time lane estimation using deep features and extra trees regression[M]. Cham: Springer International Publishing, 2015. |
| [6] | Wang X L, Qian Y Q, Wang C X, et al. Map-enhanced ego-lane detection in the missing feature scenarios[J]. IEEE Access, 2020, 8: 107958-107968. |
| [7] | Yao H C, Chen C, Liu S D, et al. Lane marking detection algorithm based on high-precision map and multisensor fusion[J]. Concurrency and Computation: Practice and Experience, 2022, 34(8): No.e5797. |
| [8] | 齐春阳. 融合交通环境信息的混合动力汽车能量管理策略研究[D]. 长春: 吉林大学汽车工程学院, 2023. |
| Qi Chun-yang. Research on energy management strategy for hybrid electric vehicle with incorporation of traffic information[D]. Changchun: College of Automotive Engineering, Jilin University,2023. | |
| [9] | 王如月. 基于交通信息的汽车制动动力学研究[D].北京:清华大学车辆与运载学院, 2021. |
| Wang Ru-yue. Research on vehicle braking dynamics based on traffic information[D]. Beijing: School of Vehicle and Mobility, Tsinghua University, 2021. | |
| [10] | Zhang Y, Zhang G. Research on the cooperative car-following behavior based on traffic information iteration[J]. International Journal of Modern Physics C, 2023, 34(1): 1-12. |
| [11] | Ding J Y, Wang J Q, Liu C C, et al. Driver steering behavior model based on lane-keeping characteristics analysis[C]∥17th international IEEE conference on intelligent transportation systems (ITSC), Qingdao, China, 2014: 623-628. |
| [12] | Tian Y, Pei H X, Yang J X, et al. An improved model of driving risk field for connected and automated vehicles[C]∥2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 285-291. |
| [13] | 何仁, 赵晓聪, 杨奕彬, 等.基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报: 工学版, 2021, 51(3): 799-809. |
| He Ren, Zhao Xiao-cong, Yang Yi-bin, et al. Man⁃machine shared driving model using risk⁃response[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 799-809. | |
| [14] | Song X, Sun Y, Tao P. A dynamic Bayesian network model for real-time risk propagation of secondary rear-end collision accident using driving risk field [J]. IEEE Access, 2022, 10: 72429-72443. |
| [15] | Ma Y L, Dong F Q, Yin B Q, et al. Real-time risk assessment model for multi-vehicle interaction of connected and autonomous vehicles in weaving area based on risk potential field[J]. Physica A, 2023, 620: No. 128725. |
| [16] | Li L H, Gan J, Yi Z, et al. Risk perception and the warning strategy based on safety potential field theory[J]. Accident Analysis and Prevention, 2020, 148: No. 105805. |
| [1] | Wei LAN,Zheng ZHOU,Guan-yu WANG,Wei WANG,Miao-miao ZHANG. Intelligent fitting method for vehicle design based on machine learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2858-2863. |
| [2] | Jin-wu GAO,Shao-long SUN,Shun-yao WANG,Bing-zhao GAO. Speed fluctuation suppression strategy of range extender based on motor torque compensation [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2475-2486. |
| [3] | Jun-wu ZHAO,Ting QU,Yun-feng HU. Trajectory planning for intelligent vehicles based on adaptive sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2802-2816. |
| [4] | Gui-shen YU,Xin CHEN,Yue TANG,Chun-hui ZHAO,Ai-jia NIU,Hui CHAI,Jing-xin NA. Effect of laser surface treatment on the shear strength of aluminum-aluminum bonding joints [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2555-2569. |
| [5] | Mei-xia JIA,Jian-jun HU,Feng XIAO. Multi⁃physics simulation method of vehicle motor under varying working conditions based on multi⁃software combination [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1862-1872. |
| [6] | Chun XIAO,Zi-chun YI,Bing-yin ZHOU,Shao-rui ZHANG. Fuzzy energy management strategy of fuel cell electric vehicle based on improved pigeon⁃inspired optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1873-1882. |
| [7] | Xue-wei SONG,Ze-ping YU,Yang XIAO,De-ping WANG,Quan YUAN,Xin-zhuo LI,Jia-wen ZHENG. Research progress on the performance changes of lithium⁃ion batteries after aging [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1817-1833. |
| [8] | Wei-dong LI,Cao-yuan MA,Hao SHI,Heng CAO. An automatic driving decision control algorithm based on hierarchical reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1798-1805. |
| [9] | Dang LU,Yan-ru SUO,Yu-hang SUN,Hai-dong WU. Estimation of tire camber and sideslip combined mechanical characteristics based on dimensionless expression [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1516-1524. |
| [10] | Zhen-hai GAO,Cheng-yuan ZHENG,Rui ZHAO. Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1142-1162. |
| [11] | Tao ZHANG,Huang-da LIN,Zhong-jun YU. Real-time rolling optimization control method for gearshift of hybrid electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1215-1224. |
| [12] | Dang LU,Xiao-fan WANG,Hai-dong WU. Analysis of uniform distribution characteristics of contact pressure of TWEEL tires [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 811-819. |
| [13] | Xin CHEN,Xiang-yuan ZHANG,Zi-tao WU,Gui-shen YU,Li-fei YANG. Effect of process sequence on tensile shear properties of PFSSW joints for automotive aluminum sheets [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 468-475. |
| [14] | Jun-long QU,Wen-ku SHI,Sheng-yi XUAN,Zhi-yong CHEN. Parameter design method of multiple dynamic vibration absorbers for suppressing multi-frequency resonance of automotive powertrain [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 444-455. |
| [15] | Jun-nian WANG,Yu-jing CAO,Zhi-ren LUO,Kai-xuan LI,Wen-bo ZHAO,Ying-yi MENG. Online detection algorithm of road water depth based on binocular vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 175-184. |
|
||