吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (2): 469-477.doi: 10.13229/j.cnki.jdxbgxb.20220990
• 交通运输工程·土木工程 • 上一篇
网联混合环境快速路交织区自动驾驶车辆换道模型
张卫华( ),刘嘉茗,解立鹏,丁恒()
),刘嘉茗,解立鹏,丁恒()
- 合肥工业大学 汽车与交通工程学院,合肥 230009
Lane⁃changing model of autonomous vehicle in weaving area of expressway in intelligent and connected mixed environment
Wei-hua ZHANG(),Jia-ming LIU,Li-peng XIE,Heng DING()
- School of Automotive and Transportation Engineering,Hefei University of Technology,Hefei 230009,China
摘要:
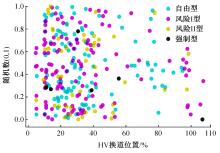
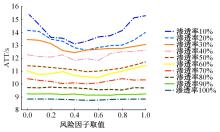
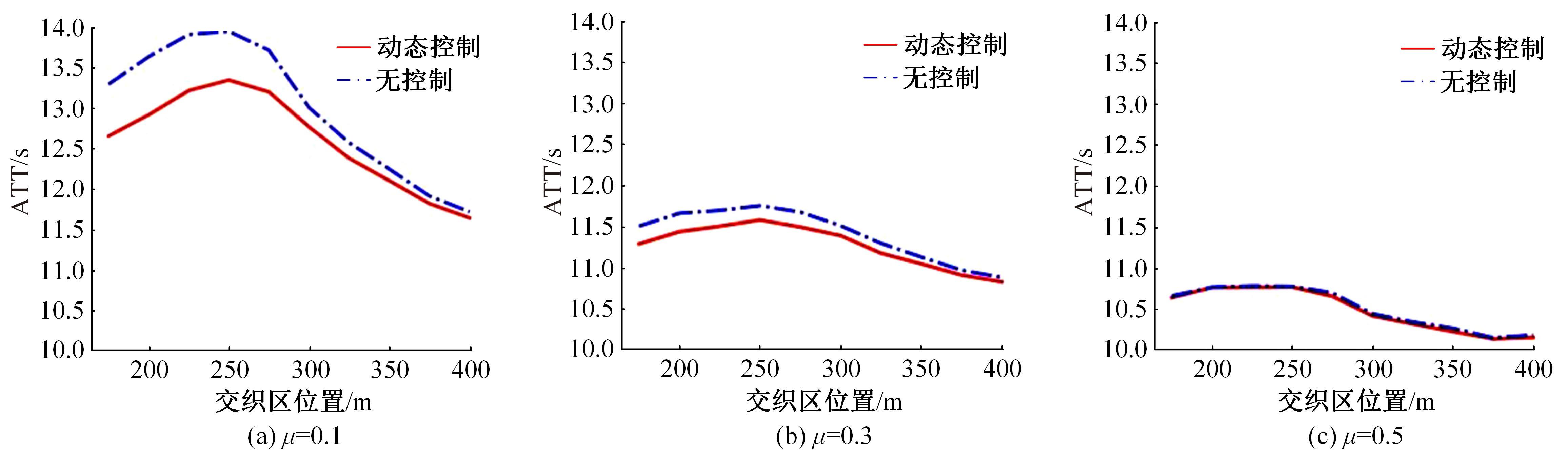
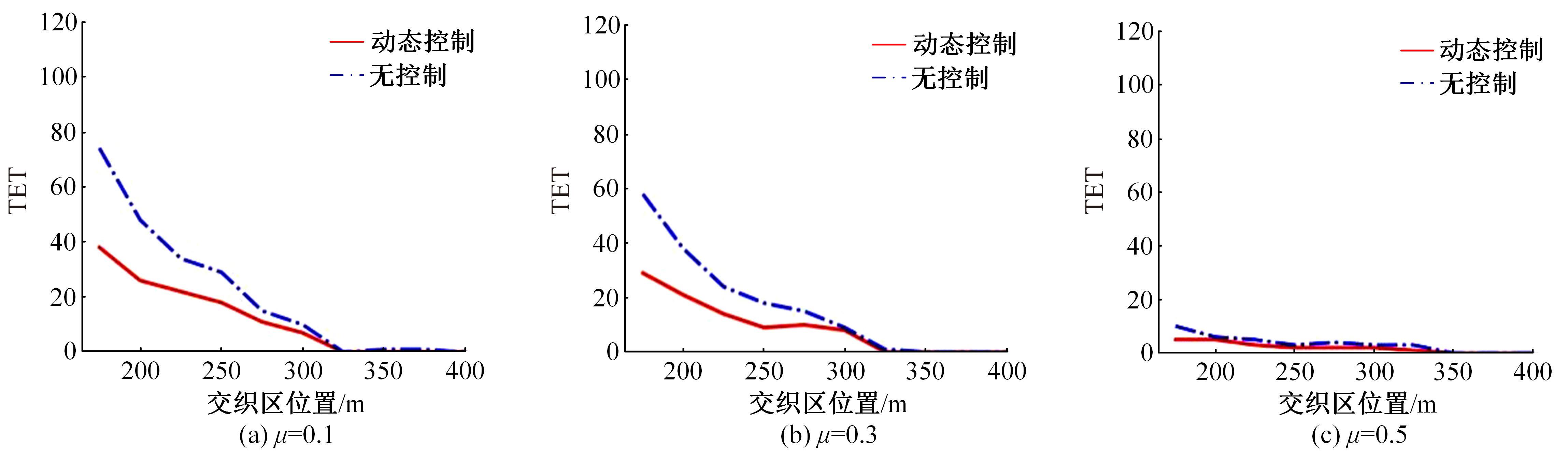
在网联自动驾驶车辆(CAV)与常规人驾车辆(HV)组成的混合交通环境,为改善快速路交织区运行状况,提出了一种CAV自由型换道动态控制模型。首先,通过引入驾驶风格参数,优化HV多级换道策略,构建快速路交织区HV数值仿真模型,并根据不同换道比例和换道位置分布对所构建模型进行了验证。进一步结合CAV渗透率与其换道模型参数,提出了CAV自由型换道动态控制模型。最后,在CAV渗透率随机服从正态分布条件下,分析了CAV动态控制模型对交通效率与安全性的影响。结果表明:在低CAV渗透率条件下,动态控制模型可以进一步改善交织区内的交通效率与安全性,并且随着渗透率的提升,动态控制模型的改善效果变化幅度逐渐减弱。
中图分类号:
- U491.2









| 1 | 曲大义,黑凯先,郭海兵,等. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报:工学版, 2022, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the internet of vehicles environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(1): 101-109. | |
| 2 | 《中国公路学报》编辑部. 中国交通工程学术研究综述·2016[J]. 中国公路学报, 2016, 29(6): 1-161. |
| Editorial Department of China Journal of Highway and Transport. Review on China's traffic engineering research progress: 2016[J]. China Journal of Highway and Transport, 2016, 29(6): 1-161. | |
| 3 | Hao W, Zhang Z, Gao Z, et al. Research on mandatory lane-changing behavior in highway weaving sections[J]. Journal of Advanced Transportation, 2020, 2020(6): 1-9. |
| 4 | 彭博, 王玉婷, 谢济铭, 等. 城市干线短交织区元胞自动机多级换道决策模型[J]. 交通运输系统工程与信息, 2020, 20(4): 41-48. |
| Peng Bo, Wang Yu-ting, Xie Ji-ming, et al. Multi-stage lane changing decision model of urban trunk road's short weaving area based on cellular automata[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(4): 41-48. | |
| 5 | 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. |
| Zong Fang, Shi Pei-xin, Wang Meng, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicle[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. | |
| 6 | Dong C, Wang H, Li Y, et al. Route control strategies for autonomous vehicles exiting to off-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(7): 3104-3116. |
| 7 | 彭浩楠,唐明环,查奇文,等. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报:工学版, 2022, 52(12): 2852-2863. |
| Peng Hao-nan, Tang Ming-huan, Zha Qi-wen, et al. Optimization based lane changing trajectory planning approach for autonomous vehicles on two lane road[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(12): 2852-2863. | |
| 8 | Guo J, Cheng S, Liu Y. Merging and diverging impact on mixed traffic of regular and autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3): 1639-1649. |
| 9 | Treiber M, Hennecke A, Helbing D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. |
| 10 | Wang H, Wang W, Chen J, et al. Using trajectory data to analyze intradriver heterogeneity in car-following[J]. Transportation Research Record Journal of the Transportation Research Board, 2010, 2188(1): 85-95. |
| 11 | 秦严严, 王昊, 王炜, 等. 混有协同自适应巡航控制车辆的异质交通流稳定性解析与基本图模型[J]. 物理学报, 2017, 66(9): 252-261. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Stability analysis and basic graph model of heterogeneous traffic flow with cooperative adaptive cruise control vehicles[J]. Acta Physica Sinica, 2017, 66(9): 252-261. | |
| 12 | Milanés V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. |
| 13 | Beinum A, Farah H, Wegman F, et al. Driving behaviour at motorway ramps and weaving segments based on empirical trajectory data[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 426-441. |
| 14 | Kesting A, Treiber M, Schoenhof M, et al. Adaptive cruise control design for active congestion avoidance[J]. Transportation Research Part C: Emerging Technologies, 2008, 16(6): 668-683. |
| 15 | Gipps P G. A model for the structure of lane-changing decision[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 16 | Yang Q, Koutsopoulos H N. A microscopic traffic simulator for evaluation of dynamic traffic management systems[J]. Transportation Research Part C: Emerging Technologies, 1996, 4(3): 113-129. |
| 17 | Minderhoud M M, Bovy P H L. Extended time-to-collision measures for road traffic safety assessment[J]. Accident Analysis & Prevention, 2001, 33(1): 89-97. |
| 18 | Li Y, Wang H, Wang W, et al. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways[J]. Accident Analysis & Prevention, 2017, 98: 87-95. |
| 19 | Rahman M, Chowdhury S, Xie Y, et al. Review of microscopic lane-changing models and future research opportunities[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(4): 1942-1956. |
| 20 | Li Y, Xing L, Wang W, et al. Evaluating impacts of different longitudinal driver assistance systems on reducing multi-vehicle rear-end crashes during small-scale inclement weather[J]. Accident Analysis & Prevention, 2017, 107: 63-76. |
| [1] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [2] | 宋成举,贾洪飞,秦昊溥. 网联车混入条件下混合交通流跟驰稳定性[J]. 吉林大学学报(工学版), 2024, 54(2): 419-426. |
| [3] | 岳昊,张琦悦,杨子玉,任孟杰,张旭. 拥堵空间排队的静态交通流分配迭代加权算法[J]. 吉林大学学报(工学版), 2024, 54(1): 136-145. |
| [4] | 杜筱婧,姚荣涵. 智能网联公交车出站强制换道的演化博弈机制[J]. 吉林大学学报(工学版), 2024, 54(1): 124-135. |
| [5] | 马壮林,崔姗姗,胡大伟,王晋. 限行政策下传统小汽车出行者出行方式选择[J]. 吉林大学学报(工学版), 2023, 53(7): 1981-1993. |
| [6] | 张雅丽,付锐,袁伟,郭应时. 考虑能耗的进出站驾驶风格分类及识别模型[J]. 吉林大学学报(工学版), 2023, 53(7): 2029-2042. |
| [7] | 尹超英,陆颖,邵春福,马健霄,许得杰. 考虑空间自相关的建成环境对通勤方式选择的影响[J]. 吉林大学学报(工学版), 2023, 53(7): 1994-2000. |
| [8] | 吴春利,黄诗茗,李魁,顾正伟,黄晓明,张炳涛,杨润超. 基于数值仿真和统计分析的洪水作用下桥墩作用效应分析[J]. 吉林大学学报(工学版), 2023, 53(6): 1612-1620. |
| [9] | 潘恒彦,王永岗,李德林,陈俊先,宋杰,杨钰泉. 基于交通冲突的长纵坡路段追尾风险评估及预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1355-1363. |
| [10] | 宋灿灿,荆迪菲,谢俊峰,康可心. 设置广告牌的高速公路平曲线路段驾驶行为分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1345-1354. |
| [11] | 罗瑞发,郝慧君,徐桃让,顾秋凡. 考虑智能网联车队强度的混合交通流基本图模型[J]. 吉林大学学报(工学版), 2023, 53(2): 405-412. |
| [12] | 卢凯,徐广辉,叶志宏,林永杰. 考虑清空时间的双向队首绿波协调控制数解算法[J]. 吉林大学学报(工学版), 2023, 53(2): 421-429. |
| [13] | 曹倩,李志慧,陶鹏飞,马永建,杨晨曦. 考虑风险异质特性的路网交通事故风险评估方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2817-2825. |
| [14] | 秦严严,杨晓庆,王昊. 智能网联混合交通流CO2排放影响及改善方法[J]. 吉林大学学报(工学版), 2023, 53(1): 150-158. |
| [15] | 张鑫,张卫华. 快速路合流区主线不同交通状态下的安全性分析[J]. 吉林大学学报(工学版), 2022, 52(6): 1308-1314. |
|
||