吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (1): 150-158.doi: 10.13229/j.cnki.jdxbgxb20210601
• 交通运输工程·土木工程 • 上一篇
智能网联混合交通流CO2排放影响及改善方法
秦严严1( ),杨晓庆2,王昊3()
),杨晓庆2,王昊3()
- 1.重庆交通大学 交通运输学院,重庆 400074
2.昆明市规划设计研究院有限公司,昆明 650041
3.东南大学 交通学院,南京 210096
Impacts of CO2 emissions and improving method for connected and automated mixed traffic flow
Yan-yan QIN1(),Xiao-qing YANG2,Hao WANG3()
- 1.School of Traffic and Transportation,Chongqing Jiaotong University,Chongqing 400074,China
2.Kunming Urban Planning & Design Institute Co. ,Ltd. ,Kunming 650041,China
3.School of Transportation,Southeast University,Nanjing 210096,China
摘要:
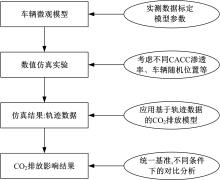
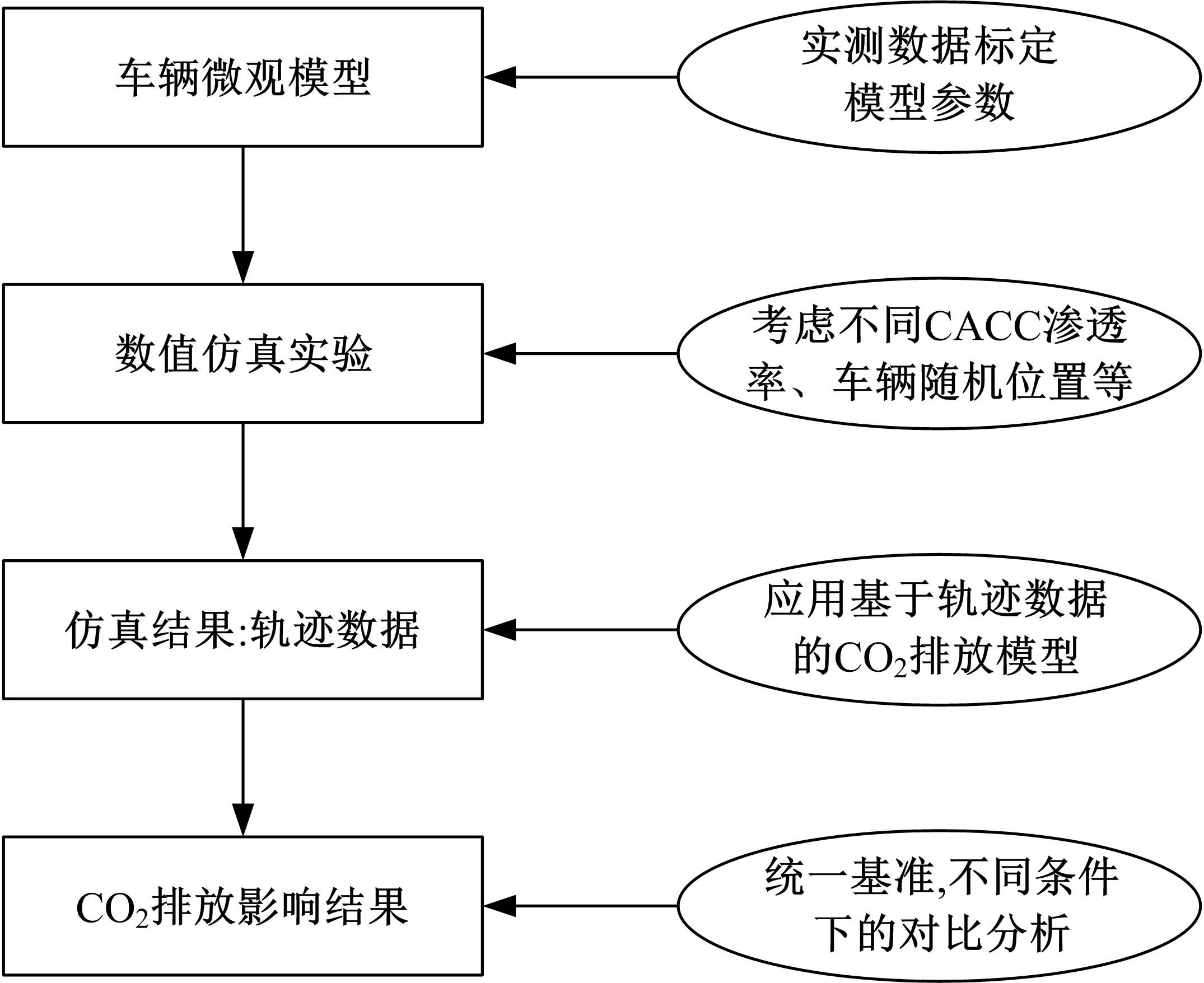
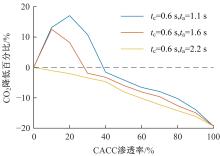
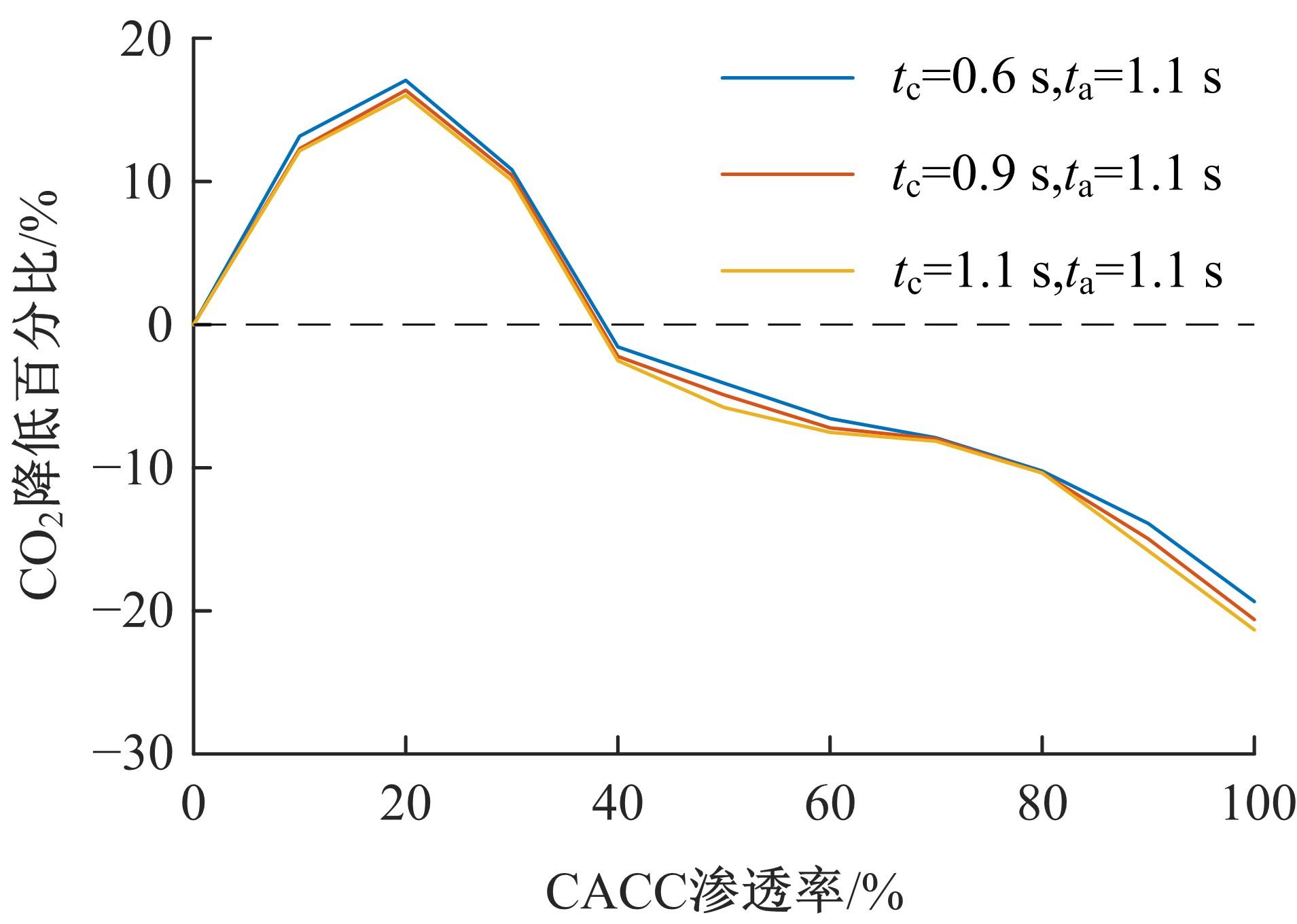
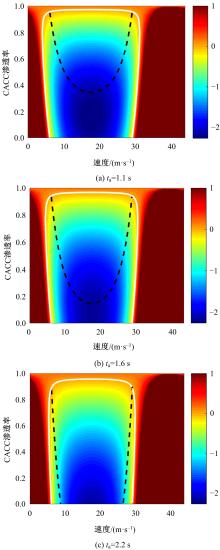
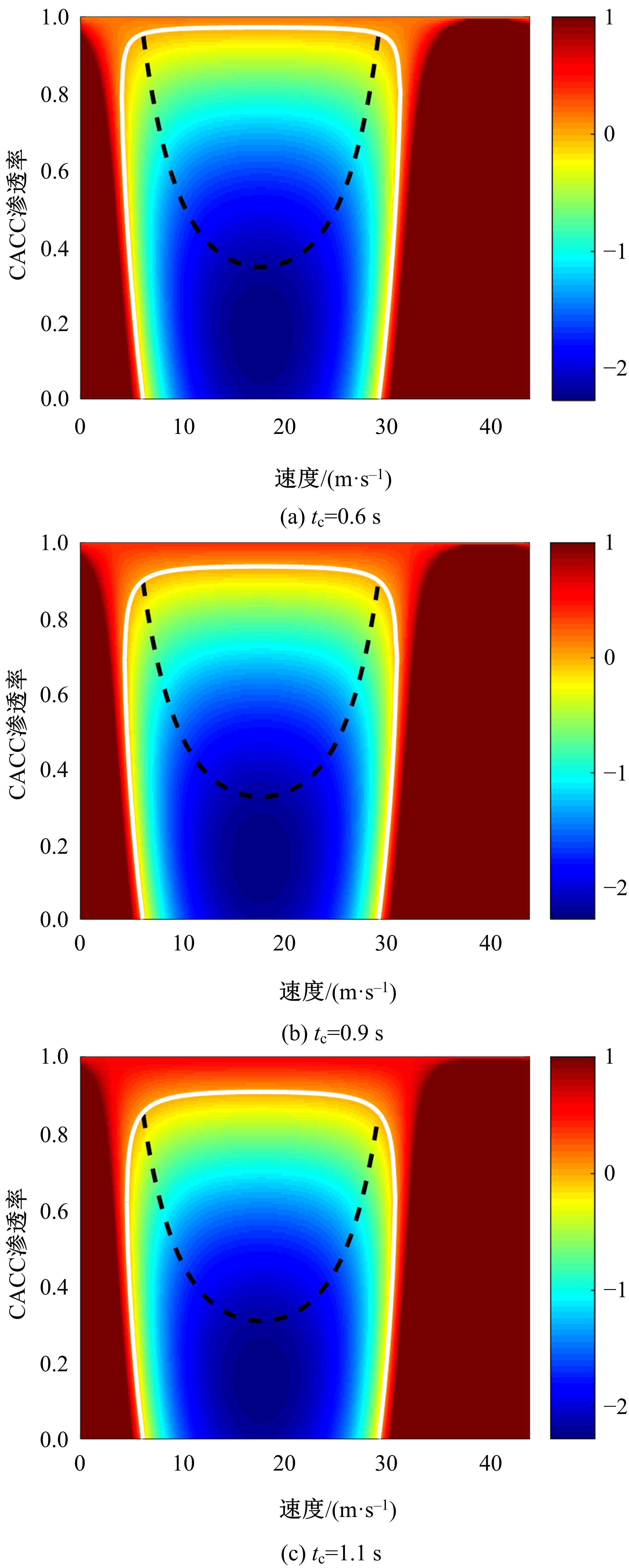
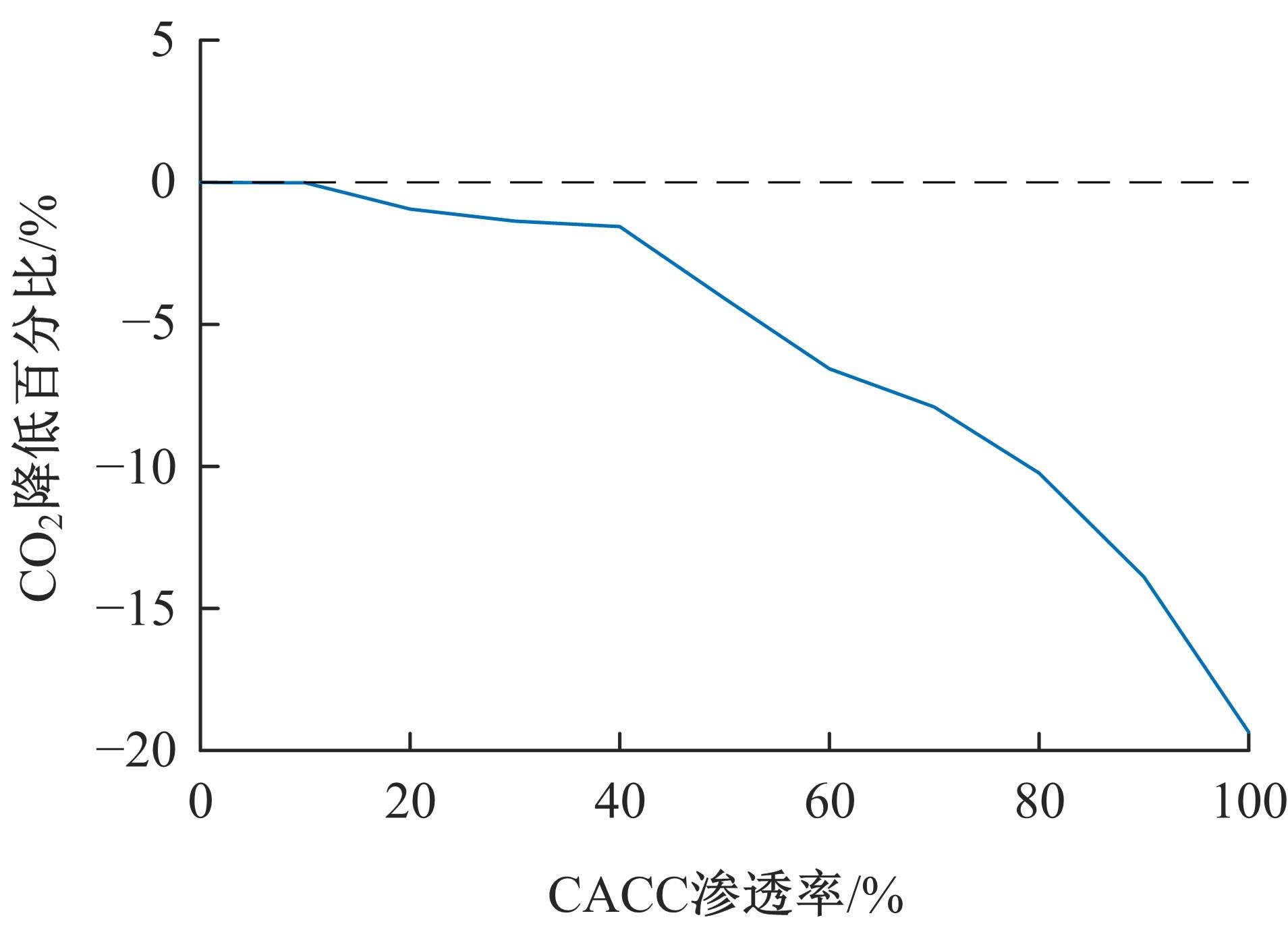
智能网联环境下协同自适应巡航控制(CACC)车辆和人工驾驶(MD)车辆将构成混合交通流,针对该混合交通流的CO2排放开展研究。首先,考虑智能网联环境特征,界定本文混合交通流的研究范围,并应用基于实测数据标定的跟驰模型描述混合流中各车型车辆的跟驰行为。然后,考虑周期性边界条件设计数值仿真实验,基于仿真轨迹数据,采用CO2排放模型计算混合交通流CO2排放影响。最后,从混合交通流稳定性层面考察CO2排放的影响机理,同时提出降低CO2排放的改善方法。研究结果表明:混合交通流CO2排放随着CACC渗透率p的增加呈现先上升后下降的影响趋势,且与交通流稳定性存在定性的影响关系,在本文方法下,混合交通流CO2排放将随着p值增加而逐渐下降,相比p=0时的MD车流,p=1时的CACC车流可将CO2排放降低约19.35%。研究结果可从降低CO2排放层面为智能网联混合交通流管理策略提供参考。
中图分类号:
- U491

| 1 | 张健, 吴坤润, 杨敏, 等. 智能网联环境下交叉口双环自适应控制模型[J]. 吉林大学学报:工学版, 2021, 51(2): 541-548. |
| Zhang Jian, Wu Kun-run, Yang Min, et al. Double-ring adaptive control model of intersection during intelligent and connected environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 541-548. | |
| 2 | Qin Y, Wang H, Ni D. Lighthill-whitham-richards model for traffic flow mixed with cooperative adaptive cruise control vehicles[J]. Transportation Science, 2021, 55(4): 883-907. |
| 3 | Li Y, Li Z, Wang H, et al. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways[J]. Accident Analysis & Prevention, 2017, 104: 137-145. |
| 4 | Wang M. Infrastructure assisted adaptive driving to stabilise heterogeneous vehicle strings[J]. Transportation Research Part C: Emerging Technologies, 2018, 91: 276-295. |
| 5 | 秦严严, 张健, 陈凌志, 等. 手动-自动驾驶混合交通流元胞传输模型[J]. 交通运输工程学报, 2020, 20(2): 229-238. |
| Qin Yan-yan, Zhang Jian, Chen Ling-zhi, et al. Cell transportation model of mixed traffic flow of manual-automated driving[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 229-238. | |
| 6 | Rahman M S, Abdel-Aty M, Wang L, et al. Understanding the highway safety benefits of different approaches of connected vehicles in reduced visibility conditions[J]. Transportation Research Record, 2018, 2672(19): 91-101. |
| 7 | Milanés V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. |
| 8 | Gong S, Zhou A, Peeta S. Cooperative adaptive cruise control for a platoon of connected and autonomous vehicles considering dynamic information flow topology[J]. Transportation Research Record, 2019, 2673(10): 185-198. |
| 9 | Zhou Y, Wang M, Ahn S. Distributed model predictive control approach for cooperative car-following with guaranteed local and string stability[J]. Transportation Research Part B: Methodological, 2019, 128: 69-86. |
| 10 | van Nunen E, Reinders J, Semsar-Kazerooni E, et al. String stable model predictive cooperative adaptive cruise control for heterogeneous platoons[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2): 186-196. |
| 11 | 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127⁃136. | |
| 12 | 常鑫, 李海舰, 荣建, 等. 混有智能网联车队的交通流基本图模型分析[J]. 东南大学学报:自然科学版, 2020, 50(4): 782-788. |
| Chang Xin, Li Hai-jian, Rong Jian, et al. Analysis on fundamental diagram model for mixed traffic flow with connected vehicle platoons[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(4): 782-788. | |
| 13 | 贾彦峰, 曲大义, 林璐, 等. 基于运行轨迹的网联混合车流速度协调控制[J].吉林大学学报:工学版, 2021, 51(6):2051-2060. |
| Jia Yan-feng, Qu Da-yi, Lin Lu, et al. Coordinated speed control of connected mixed traffic flow based on trajectory[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6):2051-2060. | |
| 14 | Jiang R, Wu Q, Zhu Z. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64:No. 017101. |
| 15 | 王雪松, 孙平, 张晓春, 等. 基于自然驾驶数据的高速公路跟驰模型参数标定[J]. 中国公路学报, 2020, 33(5): 132-142. |
| Wang Xue-song, Sun Ping, Zhang Xiao-chun, et al. Calibrating car-following models on freeway based on naturalistic driving data [J]. China Journal of Highway and Transport, 2020, 33(5): 132-142. | |
| 16 | Yu S, Shi Z. The effects of vehicular gap changes with memory on traffic flow in cooperative adaptive cruise control strategy[J]. Physica A: Statistical Mechanics and its Applications, 2015, 428: 206-223. |
| 17 | Zeng W, Miwa T, Morikawa T. Prediction of vehicle CO2 emission and its application to eco-routing navigation[J]. Transportation Research Part C: Emerging Technologies, 2016, 68: 194-214. |
| 18 | Ward J A. Heterogeneity, lane-changing and instability in traffic: a mathematical approach[D]. Bristol: University of Bristol, 2009. |
| [1] | 王殿海,胡佑薇,蔡正义,曾佳棋,姚文彬. 基于BPR函数的城市道路间断流动态路阻模型[J]. 吉林大学学报(工学版), 2023, 53(7): 1951-1961. |
| [2] | 李艳波,柳柏松,姚博彬,陈俊硕,渠开发,武奇生,曹洁宁. 考虑路网随机特性的高速公路换电站选址[J]. 吉林大学学报(工学版), 2023, 53(5): 1364-1371. |
| [3] | 胡莹,邵春福,王书灵,蒋熙,孙海瑞. 基于共享单车骑行轨迹的骑行质量识别方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1040-1046. |
| [4] | 罗瑞发,郝慧君,徐桃让,顾秋凡. 考虑智能网联车队强度的混合交通流基本图模型[J]. 吉林大学学报(工学版), 2023, 53(2): 405-412. |
| [5] | 王占中,蒋婷,张景海. 基于模糊双边界网络模型的道路运输效率评价[J]. 吉林大学学报(工学版), 2023, 53(2): 385-395. |
| [6] | 聂光明,谢波,田彦涛. 基于Frenet框架的协同自适应巡航控制算法设计[J]. 吉林大学学报(工学版), 2022, 52(7): 1687-1695. |
| [7] | 曲大义,赵梓旭,贾彦峰,王韬,刘琼辉. 基于Lennard-Jones势的车辆跟驰动力学特性及模型[J]. 吉林大学学报(工学版), 2022, 52(11): 2549-2557. |
| [8] | 闫云娟,查伟雄,石俊刚,李剑. 具有随机充电需求的混合动态网络平衡模型[J]. 吉林大学学报(工学版), 2022, 52(1): 136-143. |
| [9] | 户佐安,夏一鸣,蔡佳,薛锋. 延误条件下综合多种策略的城轨列车运行调整优化[J]. 吉林大学学报(工学版), 2021, 51(5): 1664-1672. |
| [10] | 李浩,陈浩. 考虑充电排队时间的电动汽车混合交通路网均衡[J]. 吉林大学学报(工学版), 2021, 51(5): 1684-1691. |
| [11] | 朱才华,孙晓黎,李岩. 站点分类下的城市公共自行车交通需求预测[J]. 吉林大学学报(工学版), 2021, 51(2): 531-540. |
| [12] | 罗清玉,田万利,贾洪飞. 考虑通勤需求的电动汽车充电站选址与定容模型[J]. 吉林大学学报(工学版), 2019, 49(5): 1471-1477. |
| [13] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [14] | 曹骞, 李君, 刘宇, 曲大为. 基于马尔科夫链的长春市乘用车行驶工况构建[J]. 吉林大学学报(工学版), 2018, 48(5): 1366-1373. |
| [15] | 孙宝凤, 高坤, 申琇秀, 梁婷. 基于能力平衡和变覆盖半径的加油站网络扩充选址模型[J]. 吉林大学学报(工学版), 2018, 48(3): 704-711. |
|
||