吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (4): 996-1006.doi: 10.13229/j.cnki.jdxbgxb.20221059
寒区危险路段半挂汽车列车横向稳定性控制策略
都雪静( ),王宁,张杰,裴玉龙
),王宁,张杰,裴玉龙
- 东北林业大学 交通学院,哈尔滨 150040
Control strategy of lateral stability of semi-trailer train in dangerous section of cold area
Xue-jing DU(),Ning WANG,Jie ZHANG,Yu-long PEI
- School of Traffic and Transportation,Northeast Forestry University,Harbin 150040,China
摘要:
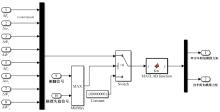
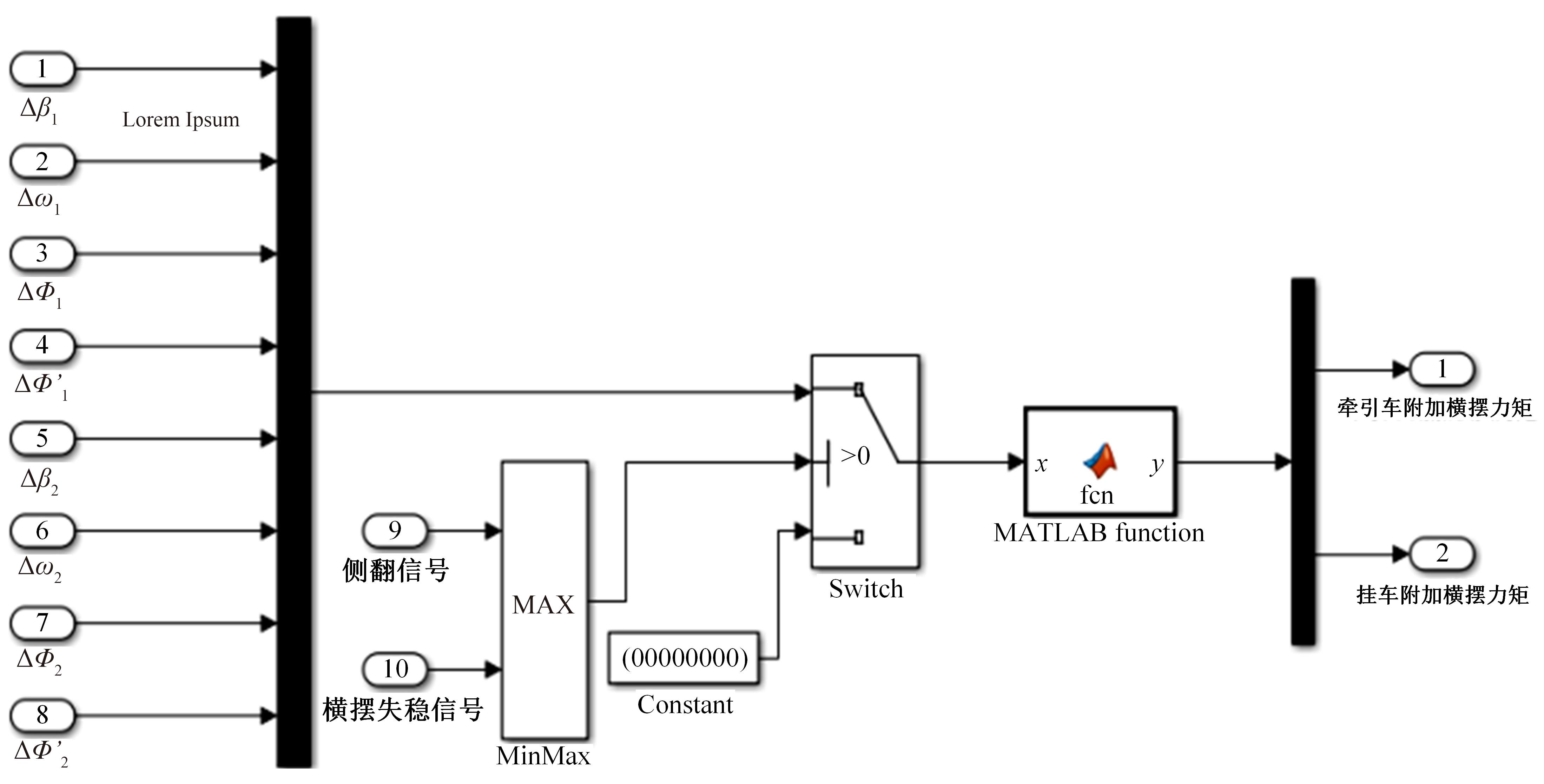
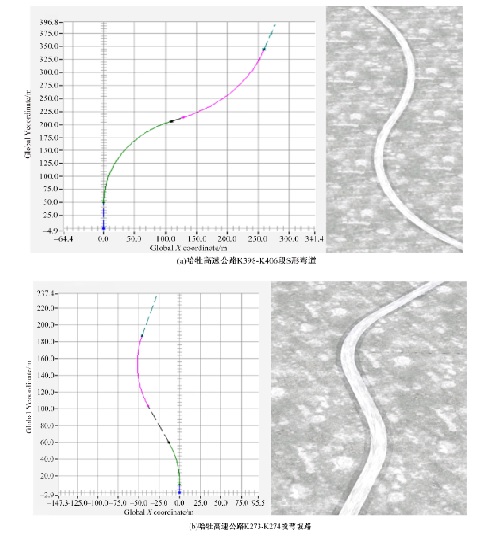
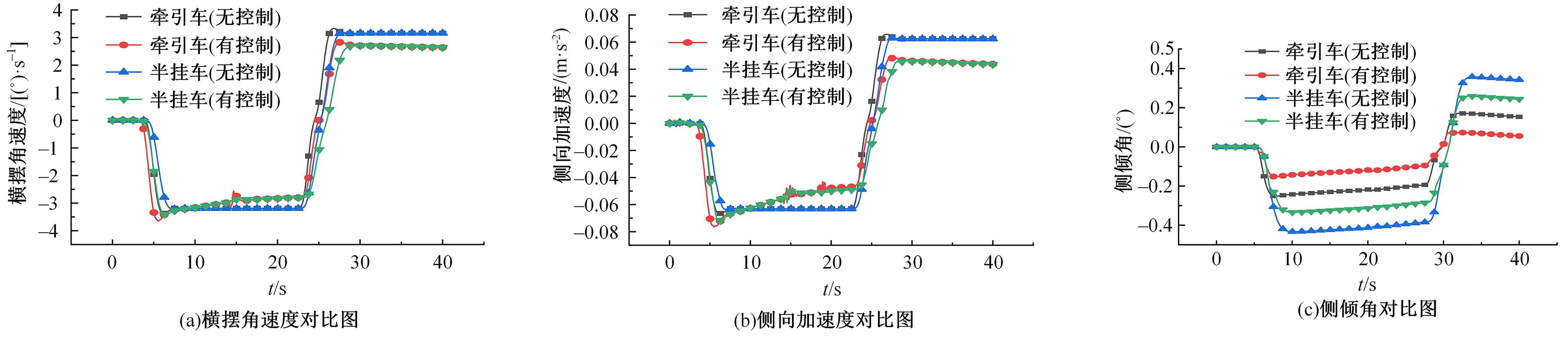
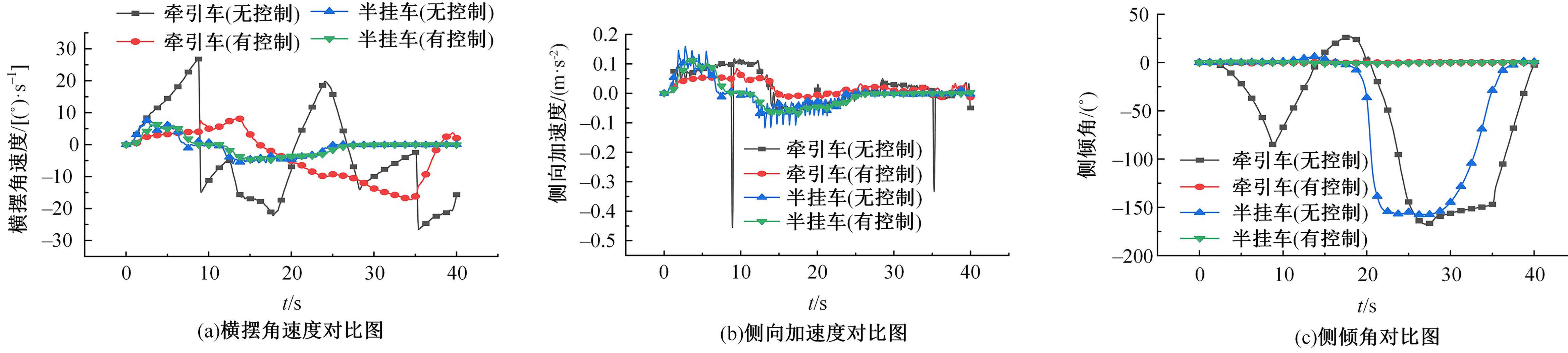
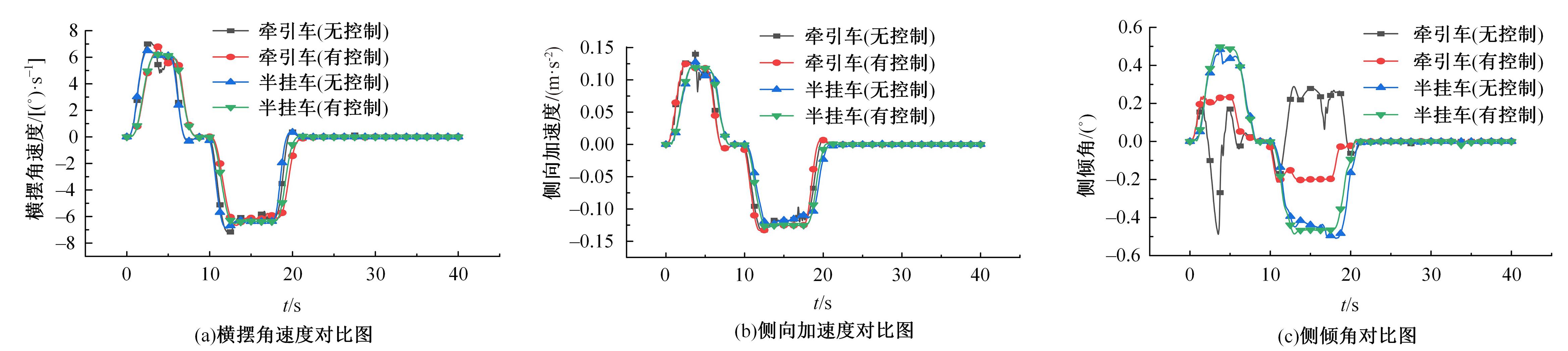
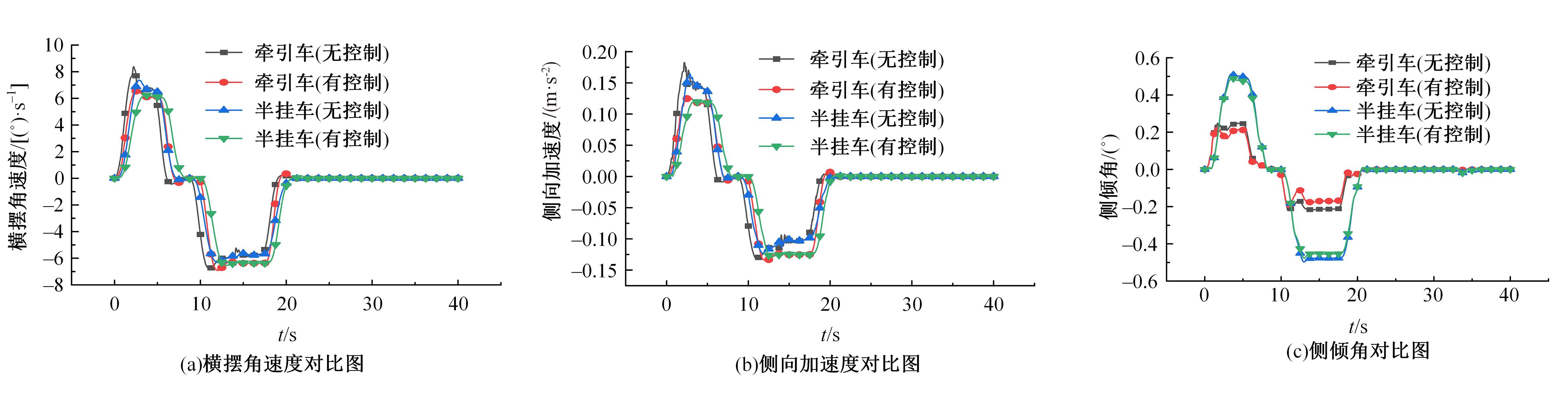
针对半挂汽车列车在寒区山地公路危险路段行驶会发生折叠、甩尾和侧翻的问题,以国内某款半挂汽车列车为研究对象,基于汽车动力学理论建立六自由度半挂汽车列车动力学数学模型;运用Truck-sim完成半挂汽车列车整车模型和危险路段模型的建立,依据半挂汽车列车发生侧翻和横摆失稳的原理,确定了半挂汽车列车侧翻和横摆失稳的判定条件。以半挂汽车列车的理想状态参数和实际状态参数的差值为控制目标,借助Simulink建立了基于线性二次型调节器(LQR)控制算法和差动制动的半挂汽车列车防侧翻和横摆失稳控制策略;选取哈牡高速公路较为典型的危险路段,改变路面附着系数对应不同实际情况下的路面,通过Truck-sim与Simulink联合仿真进行场景重构,对本文控制策略进行仿真试验。结果表明:在哈牡高速公路K398-K406段S形弯道公路上,路面附着系数为0.1、0.25和0.35时,能够实现牵引车侧倾角最大值减小0.05°、0.04°和0.1°,半挂车侧倾角最大值减小0.04°、0.01°和0.1°,路面附着系数为0.35时,减小幅度最大,分别为40%和23.26%。在哈牡高速公路K273-K274段弯坡路上,路面附着系数为0.1时,控制策略有效阻止了车辆的侧翻,路面附着系数为0.25和0.35时,控制策略下侧倾角最大值减小0.04°和0.02°,对应减小幅度为16%和3.92%。控制策略能够有效降低牵引车和半挂车侧向加速度、横摆角速度及侧倾角的峰值,对侧倾角的控制尤为明显,可以避免冰雪天气下半挂汽车列车行驶在弯坡路时出现侧翻等危险事故。
中图分类号:
- U461.6










| 1 | You K S, Sun L. Reliability analysis of vehicle stability on combined horizontal and vertical alignments: driving safety perspective[J]. Journal of Transportation Engineering, 2013, 139(8): 804-813. |
| 2 | Kim K, Guan H, Wang B, et al. Active steering control strategy for articulated vehicles[J]. Frontiers of Information Technology & Electronic Engineering, 2016, 17(6): 576-586. |
| 3 | Esmaeili N, Kazemi R. Development of the active disturbance rejection control method for increasing the stability of the long articulate vehicle[J]. Journal of Automobile Engineering, 2019, 233(13):3554-3576. |
| 4 | Michalek M. Agile maneuvering with intelligent articulated vehicles: a control perspective[J]. IFAC PapersOnLine, 2019, 52(8):458-473. |
| 5 | Kharrazi S, Lidberg M, Fredriksson J. Robustness analysis of a steering-based control strategy for improved lateral performance of a truck-dolly-semitrailer[J]. International Journal of Heavy Systems, 2015,22(1):1-20. |
| 6 | Jalali M, Hashemi E, Khajepour A, et al. Model predictive control of vehicle rollover with experimental verification[J]. Control Engineering Practice, 2018, 77: 95-108. |
| 7 | 朱天军, 李飞, 宗长富, 等. 重型半挂车多目标稳定性控制策略[J]. 农业机械学报, 2011, 42(12): 32-37. |
| Zhu Tian-jun, Li Fei, Zong Chang-fu,et al. Multi-objective stability control strategy for heavy semi-trailers [J]. Transactions of the Chinese Society of Agricultural Machinery, 2011, 42(12): 32-37. | |
| 8 | 杨秀建,杨春曦,张弦,等. 基于主动制动的半挂汽车列车横摆稳定性控制[J]. 汽车工程, 2011, 33(11): 955-961. |
| Yang Xiu-jian, Yang Chun-xi, Zhang Xian, et al. Semi-trailer yaw stability control based on active braking[J]. Automotive Engineering, 2011, 33(11): 955-961. | |
| 9 | Feng C, Ding N G,Heyn,et al. Integrated control of automobile ABS/DYC/AFS for improving braking performance and stability[J] .International Journal of Vehicle Design, 2015,67(3):259-293. |
| 10 | Riofrio A, Sanz S, Boada M J L, et al. A LQR-based controller with estimation of road bank for improving vehicle lateral and rollover stability via active suspension[J]. Sensors, 2017, 17(10): 2318-2318. |
| 11 | Shao K, Zheng J, Huang K, et al. Robust active steering control for vehicle rollover prevention[J]. International Journal of Modelling, Identification and Control, 2019, 32(1): 70-84.. |
| 12 | Latif A R, Chalhoub N, Pilipchuk V. Control of the nonlinear dynamics of a truck and trailer combination[J].Nonlinear Dynamics, 2020, 99(4):2505-2526. |
| 13 | Kural K, Hatzidimitris P, Wouw N V D, et al. Active trailer steering control for high capacity vehicle combinations[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(4):251-265. |
| 14 | Abroshan M, Taiebat M, Goodarzi A, et al. Automatic steering control in tractor semi-trailer vehicles for low-speed maneuverability enhancement[J]. Journal of Multi-Body Dynamics, 2017, 231(1):83-102. |
| 15 | 赵伟强,凌锦鹏,宗长富. 半挂式液罐车防侧翻控制策略开发[J]. 汽车工程, 2019, 41(1): 50-56. |
| Zhao Wei-qiang, Ling Jin-peng, Zong Chang-fu. Development of anti-rollover control strategy for semi-trailer tanker[J]. Automotive Engineering, 2019, 41(1): 50-56. | |
| 16 | 聂枝根,王万琼,宗长富,等. 基于线性变参数实时简化模型的重型半挂车稳定性控制策略[J]. 中国公路学报, 2018, 31(1): 128-136. |
| Nie Zhi-gen, Wang Wan-qiong, Zong Chang-fu, et al. Heavy-duty semi-trailer stability control strategy based on linear variable parameter real-time simplified model[J]. China Journal of Highway and Transport, 2018, 31(1): 128-136. | |
| 17 | 郭祥靖,孙攀,邓杰,等. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359, 1366. |
| Guo Xiang-jing, Sun Pan, Deng Jie, et al. Research on AEB control strategy of a heavy tractor-semitrailer combination based on BP neural network algorithm prediction[J]. Automotive Engineering, 2021, 43(9):1350-1359, 1366. | |
| 18 | 刘春辉,关志伟,申荣卫,等. 四轮转向半挂汽车列车鲁棒最优保性能控制[J]. 现代制造工程, 2016(4): 69-73. |
| Liu Chun-hui, Guan Zhi-wei, Shen Rong-wei, et al. Robust and optimal guaranteed performance control for four-wheel steering semi-trailer trucks and trains[J]. Modern Manufacturing Engineering, 2016(4): 69-73. | |
| 19 | 孙文财, 李伟建, 张景海, 等. 基于液固双向耦合的罐式半挂车侧翻阈值辨识[J]. 吉林大学学报:工学版, 2020, 50(4): 1387-1395. |
| Sun Wen-chai, Li Wei-jian, Zhang Jing-hai, et al. Identification of rollover threshold value of tank semi-trailer based onliquid-solid coupling[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(4): 1387-1395. | |
| 20 | 徐飞翔, 周晨, 王军, 等. 基于变传动比的全轮线控转向车辆可拓H∞控制方法研究[J]. 中国公路学报, 2021, 34(9): 133-145. |
| Xu Fei-xiang, Zhou Chen, Wang Jun, et al. Extension control method for all-wheel steer-by-wire vehicles based on variable transmission ratio[J]. China Journal of Highway and Transport, 2021, 34(9): 133-145. |
| [1] | 周遊,洪伟,解方喜,刘宇,宫洵,李小平. 气门控制策略对无节气门发动机性能的影响[J]. 吉林大学学报(工学版), 2024, 54(1): 55-65. |
| [2] | 张立斌,冯诗源,单洪颖,王冠然. 基于轮胎滑移率与单目视觉的半挂汽车列车制动时序检测[J]. 吉林大学学报(工学版), 2023, 53(12): 3415-3423. |
| [3] | 郭柏苍,雒国凤,金立生,谢宪毅,孙栋先. 面向自动驾驶虚拟测试的变道切入场景库构建方法[J]. 吉林大学学报(工学版), 2023, 53(11): 3130-3140. |
| [4] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [5] | 马义,张剑,游美祥,宫熔,何特立,方伟. 燃料电池空气系统动态控制策略优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2175-2181. |
| [6] | 刘汉武,雷雨龙,阴晓峰,付尧,李兴忠. 增程式电动汽车增程器多点控制策略优化[J]. 吉林大学学报(工学版), 2022, 52(8): 1741-1750. |
| [7] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [8] | 林学东, 江涛, 许涛, 李德刚, 郭亮. 高压共轨柴油机起动工况高压泵控制策略[J]. 吉林大学学报(工学版), 2018, 48(5): 1436-1443. |
| [9] | 秦大同, 林毓培, 胡建军, 郭子涵. 基于无级变速器速比控制的插电式混合动力汽车再生制动控制策略[J]. 吉林大学学报(工学版), 2018, 48(2): 380-386. |
| [10] | 王郭俊, 许洪国, 刘宏飞. 双半挂汽车列车转弯运动轨迹仿真分析[J]. 吉林大学学报(工学版), 2018, 48(2): 415-422. |
| [11] | 何仁, 陈珊珊. 基于液力缓速器换挡控制的半挂汽车列车制动稳定性[J]. 吉林大学学报(工学版), 2017, 47(6): 1677-1687. |
| [12] | 王佳怡, 刘昕晖, 王昕, 齐海波, 孙晓宇, 王丽. 数字二次元件变量冲击机理及其抑制[J]. 吉林大学学报(工学版), 2017, 47(6): 1775-1781. |
| [13] | 夏超英, 杜智明. 混合动力汽车实时优化控制策略仿真分析[J]. 吉林大学学报(工学版), 2016, 46(4): 1276-1286. |
| [14] | 韩晓梅, 林学东, 李德刚, 李闯. 轻型车用柴油机起动怠速过渡过程瞬态喷油量控制[J]. 吉林大学学报(工学版), 2016, 46(4): 1103-1108. |
| [15] | 张义花, 许洪国, 刘宏飞. 基于Trucksim的双挂汽车列车瞬态侧翻状态[J]. 吉林大学学报(工学版), 2016, 46(4): 1065-1069. |
|
||