吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (11): 3130-3140.doi: 10.13229/j.cnki.jdxbgxb.20220029
面向自动驾驶虚拟测试的变道切入场景库构建方法
郭柏苍1( ),雒国凤1,金立生1(),谢宪毅1,孙栋先2
),雒国凤1,金立生1(),谢宪毅1,孙栋先2
- 1.燕山大学 车辆与能源学院,河北 秦皇岛 066004
2.吉林大学 交通学院,长春 130022
Construction method of cut-in scenario library for automatic driving virtual tests
Bai-cang GUO1(),Guo-feng LUO1,Li-sheng JIN1(),Xian-yi XIE1,Dong-xian SUN2
- 1.School of Vehicle and Energy,Yanshan University,Qinhuangdao 066004,China
2.College of Transportation,Jilin University,Changchun 130022,China
摘要:
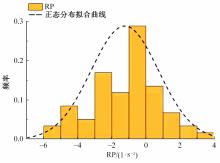
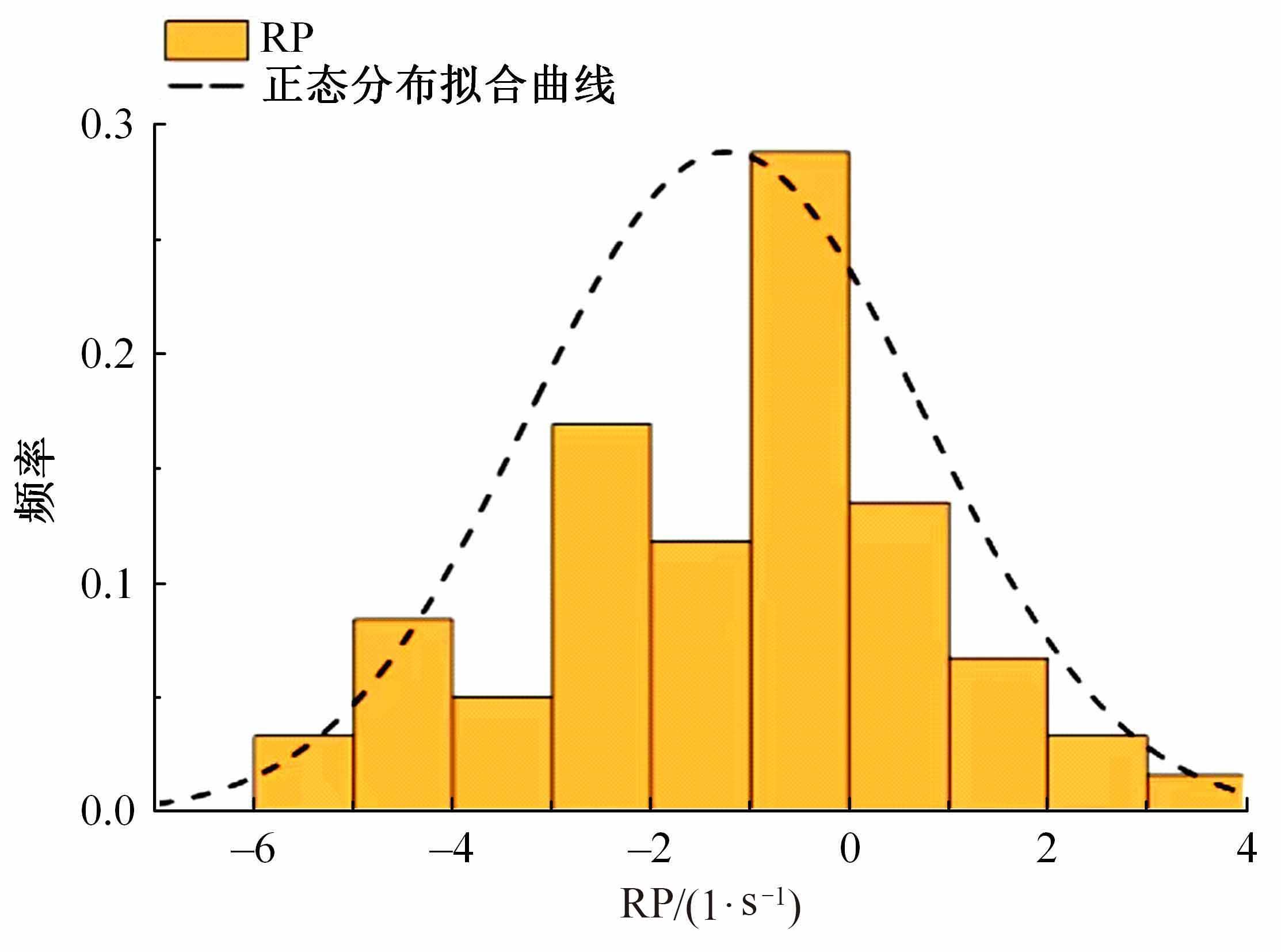
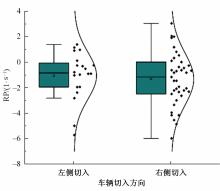
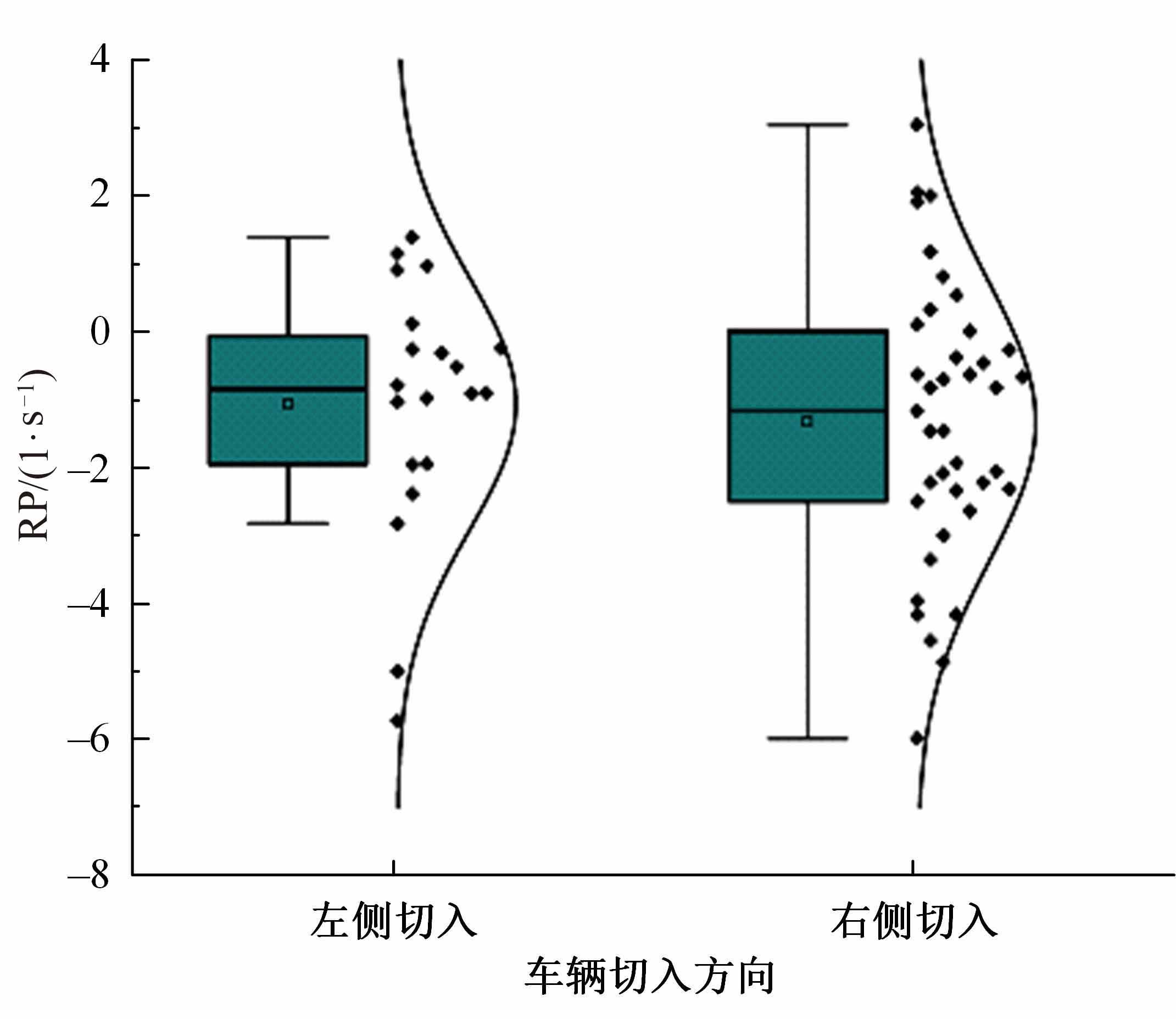
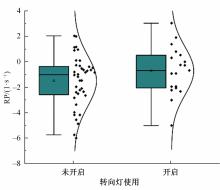
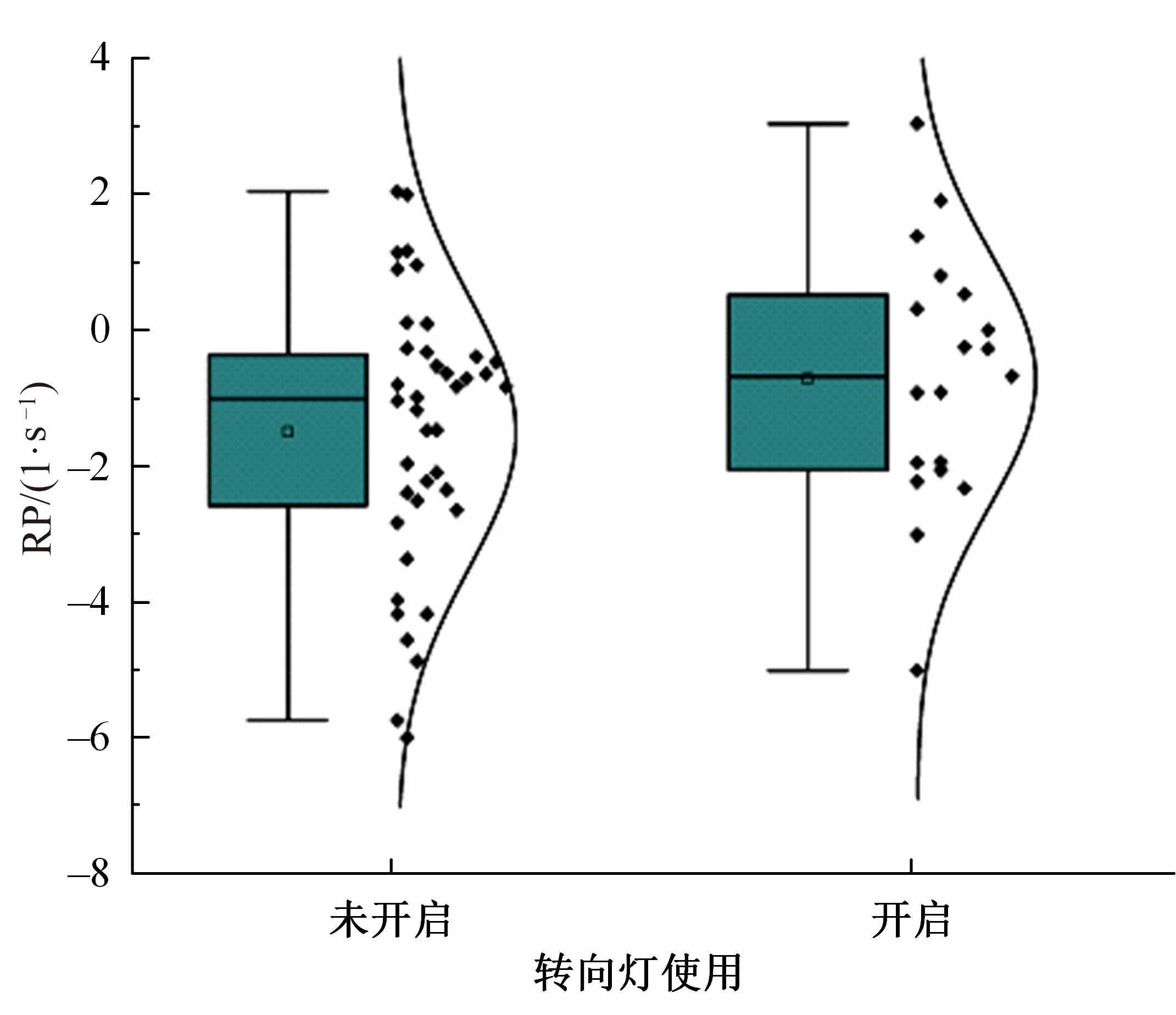
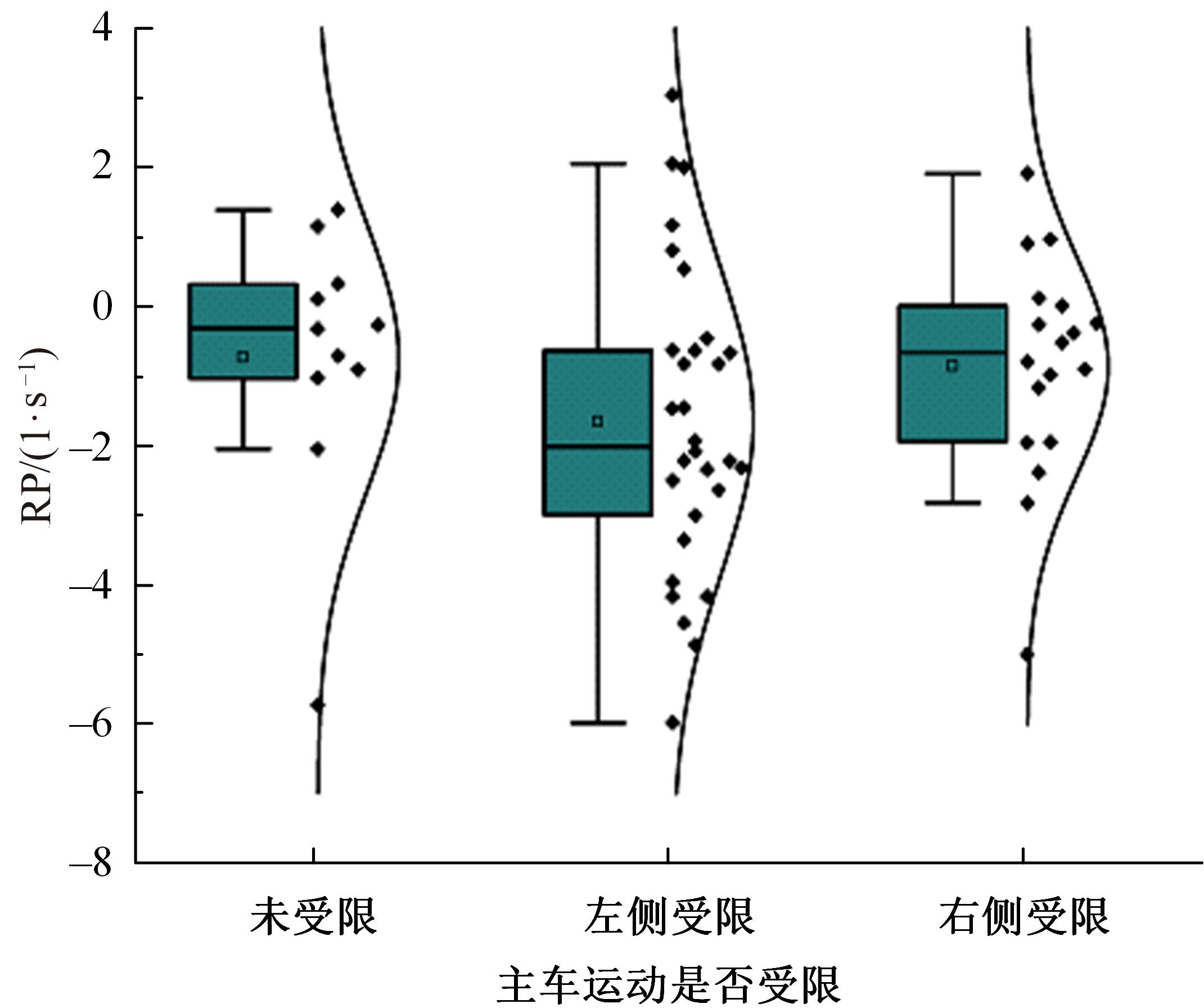
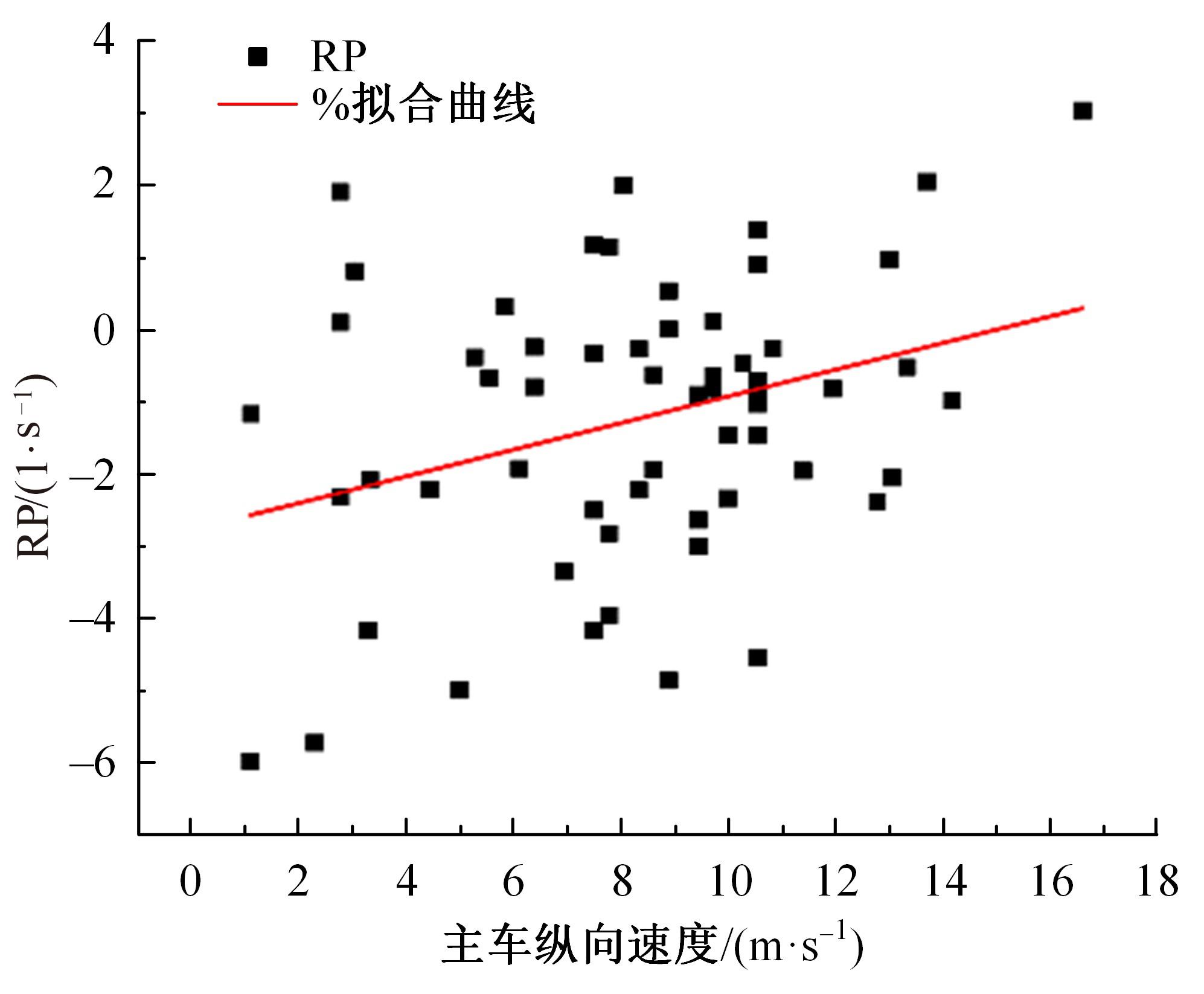
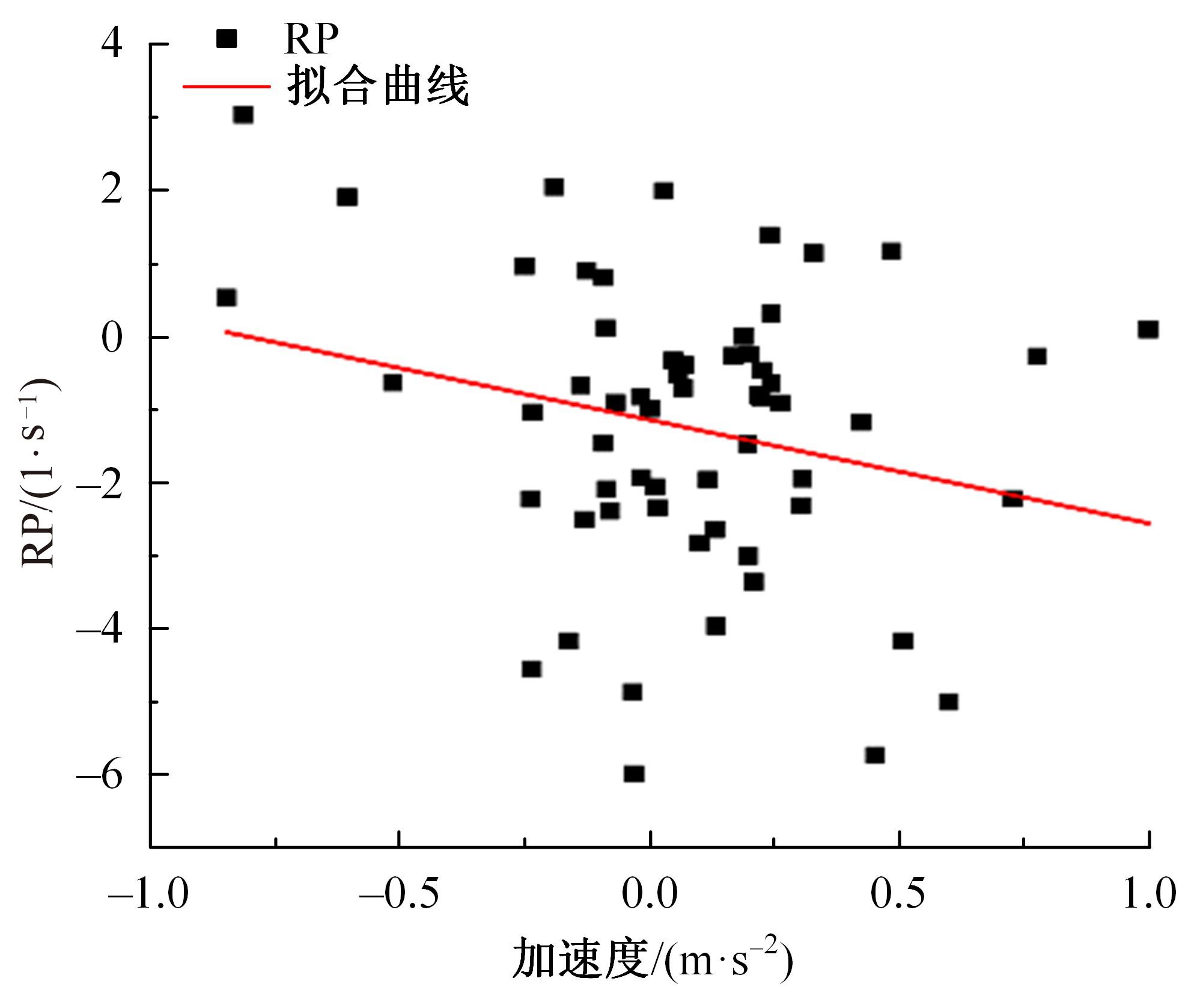
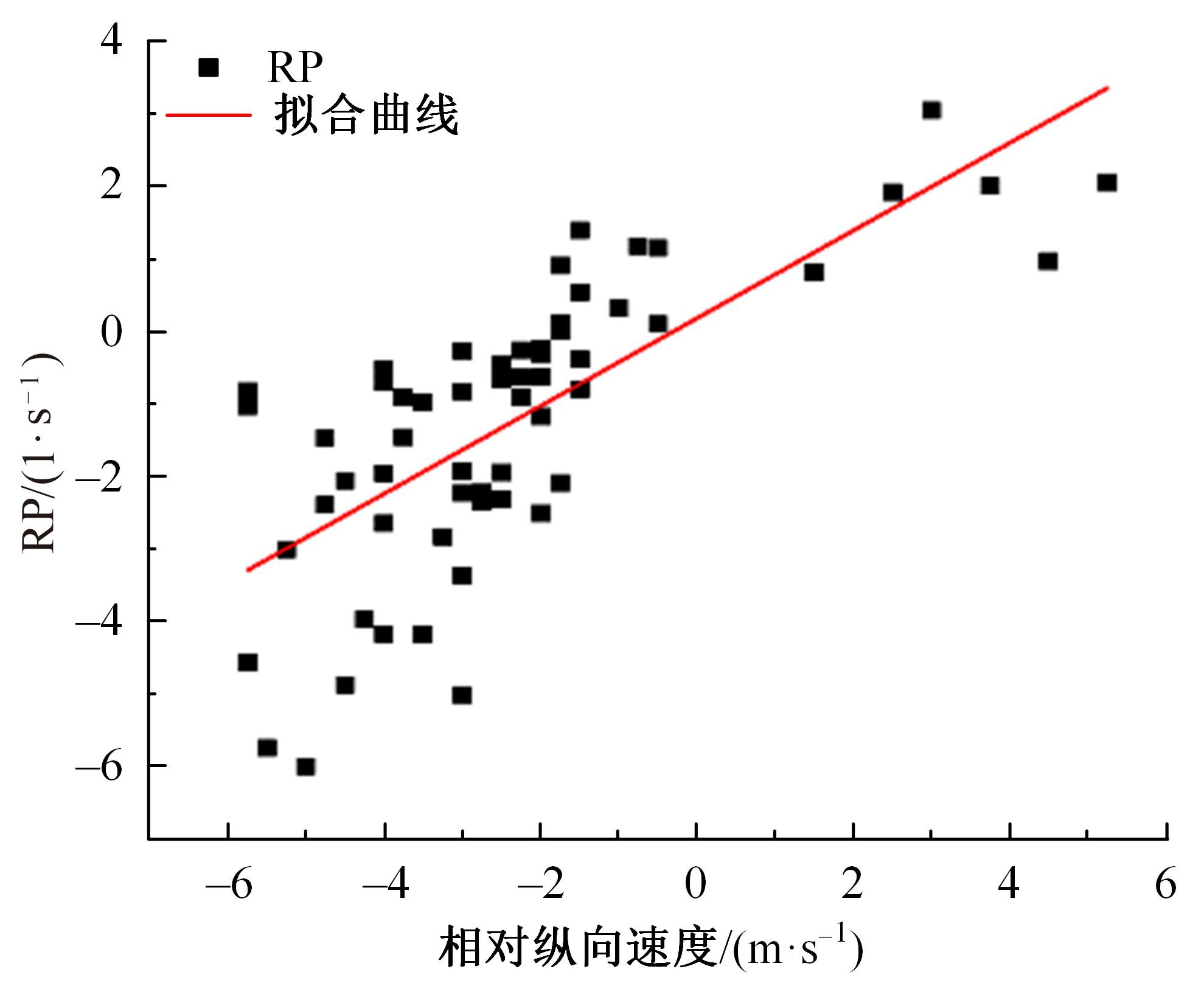
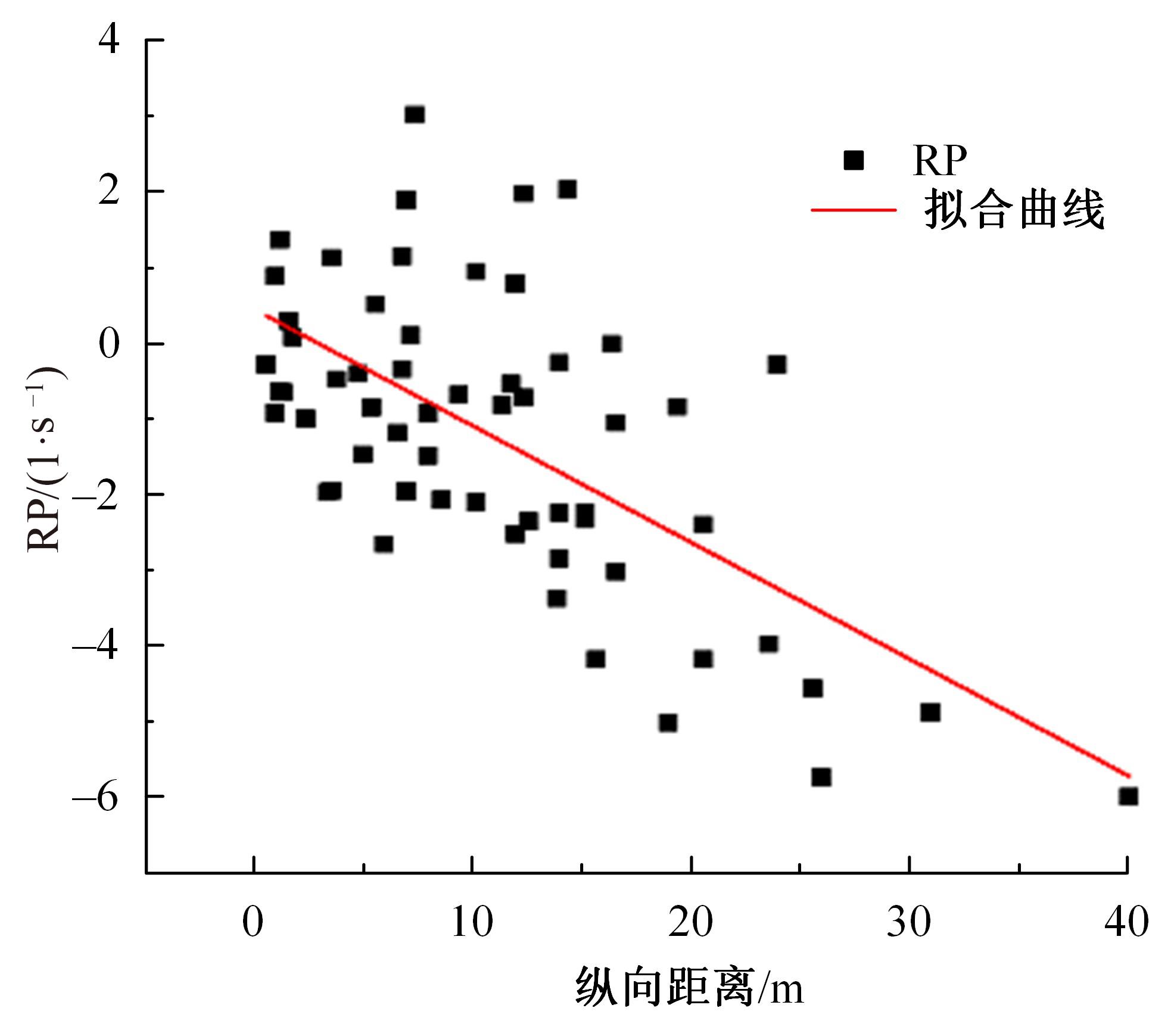
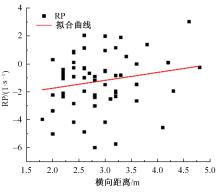
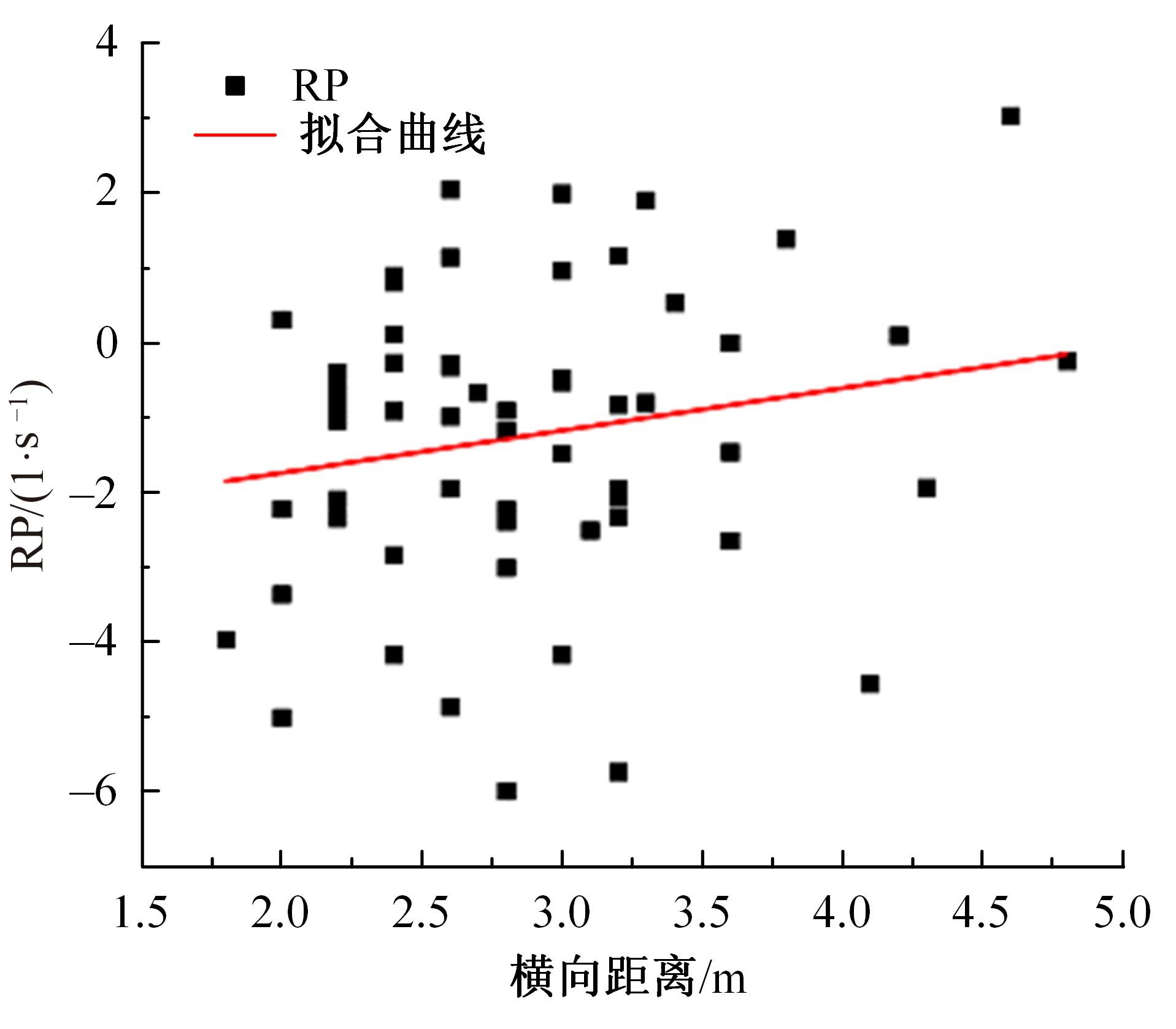
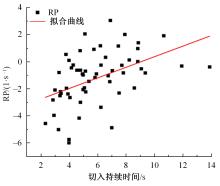
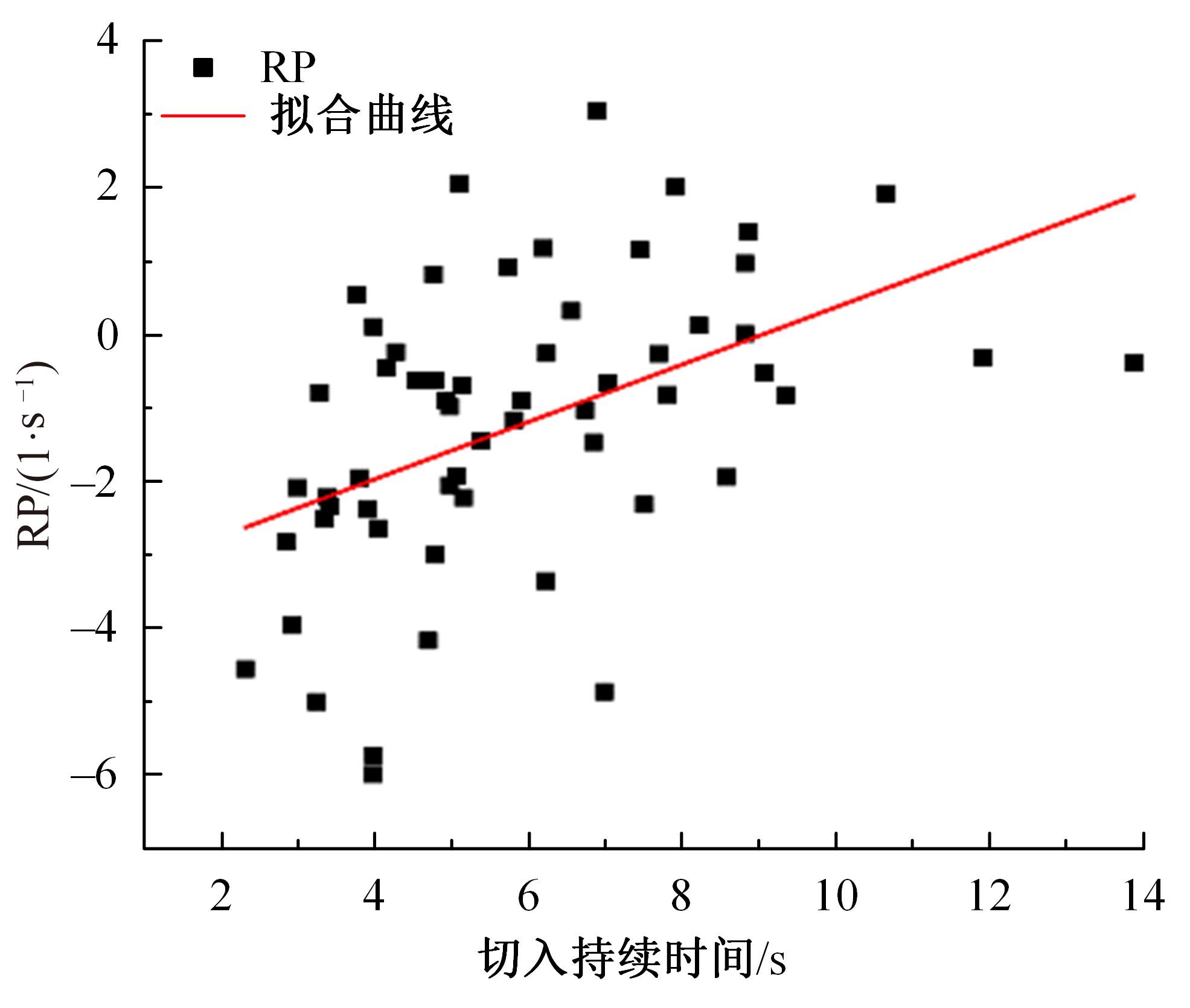
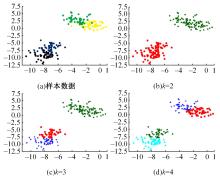
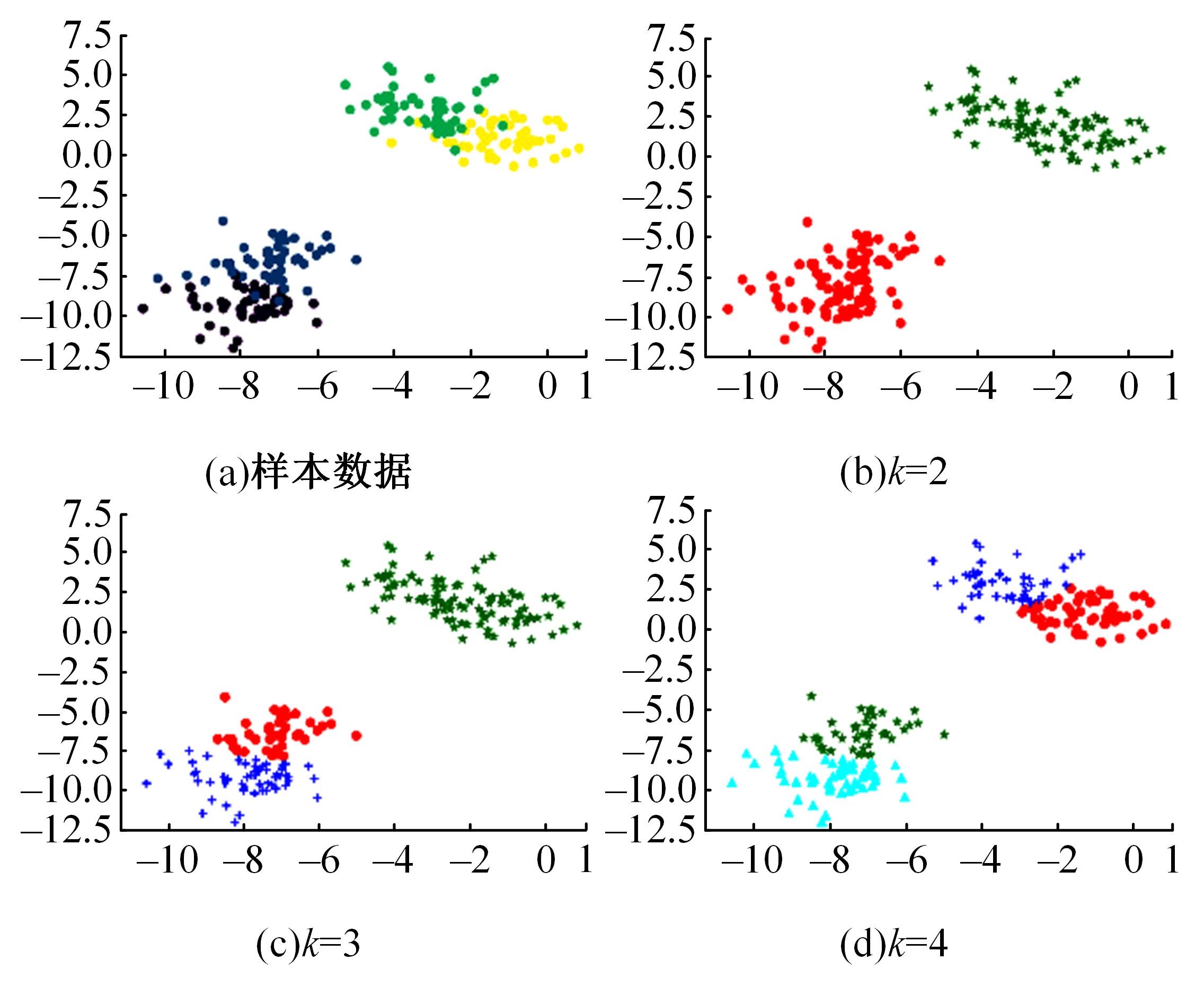
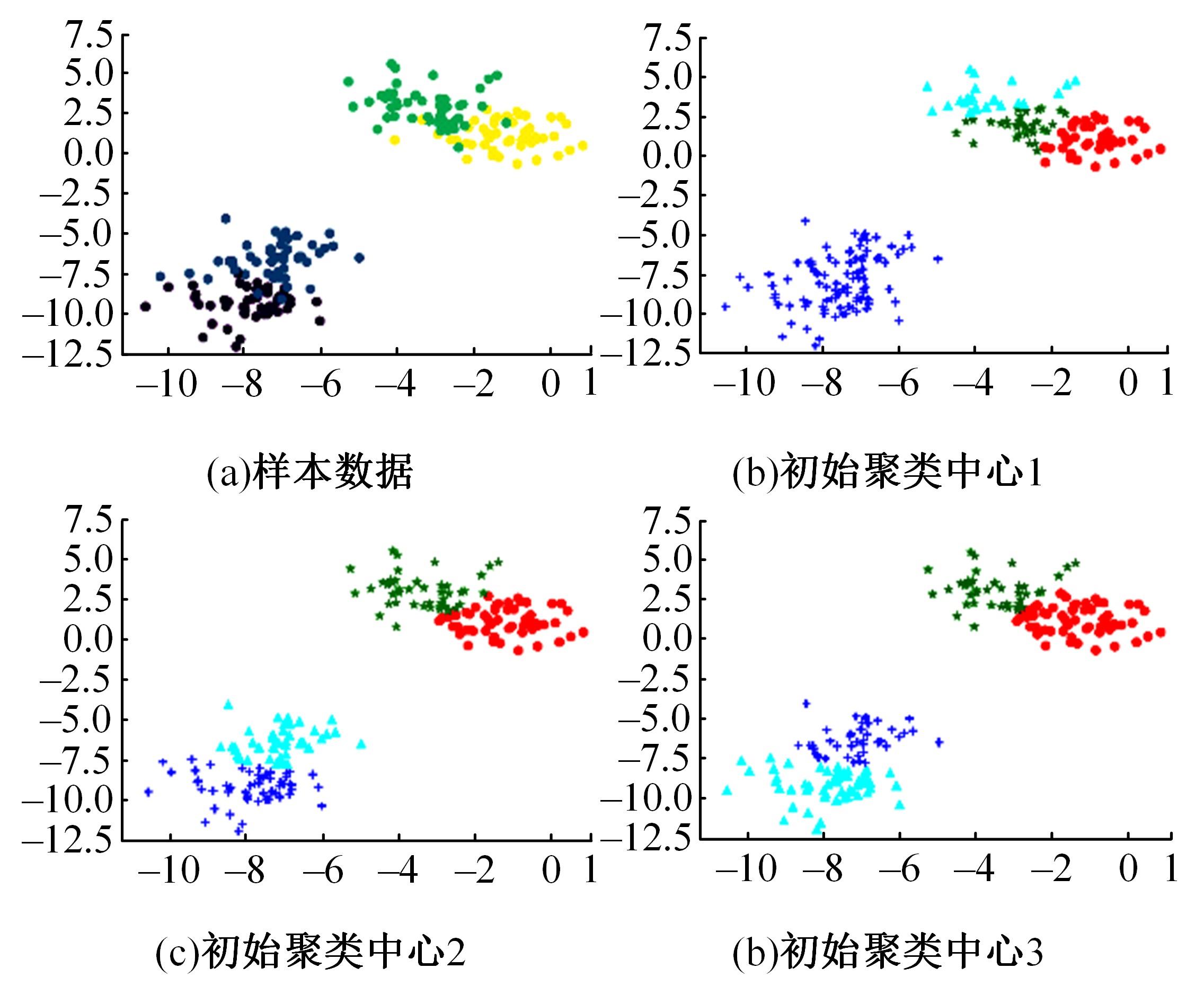
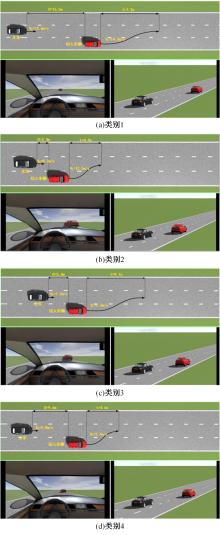
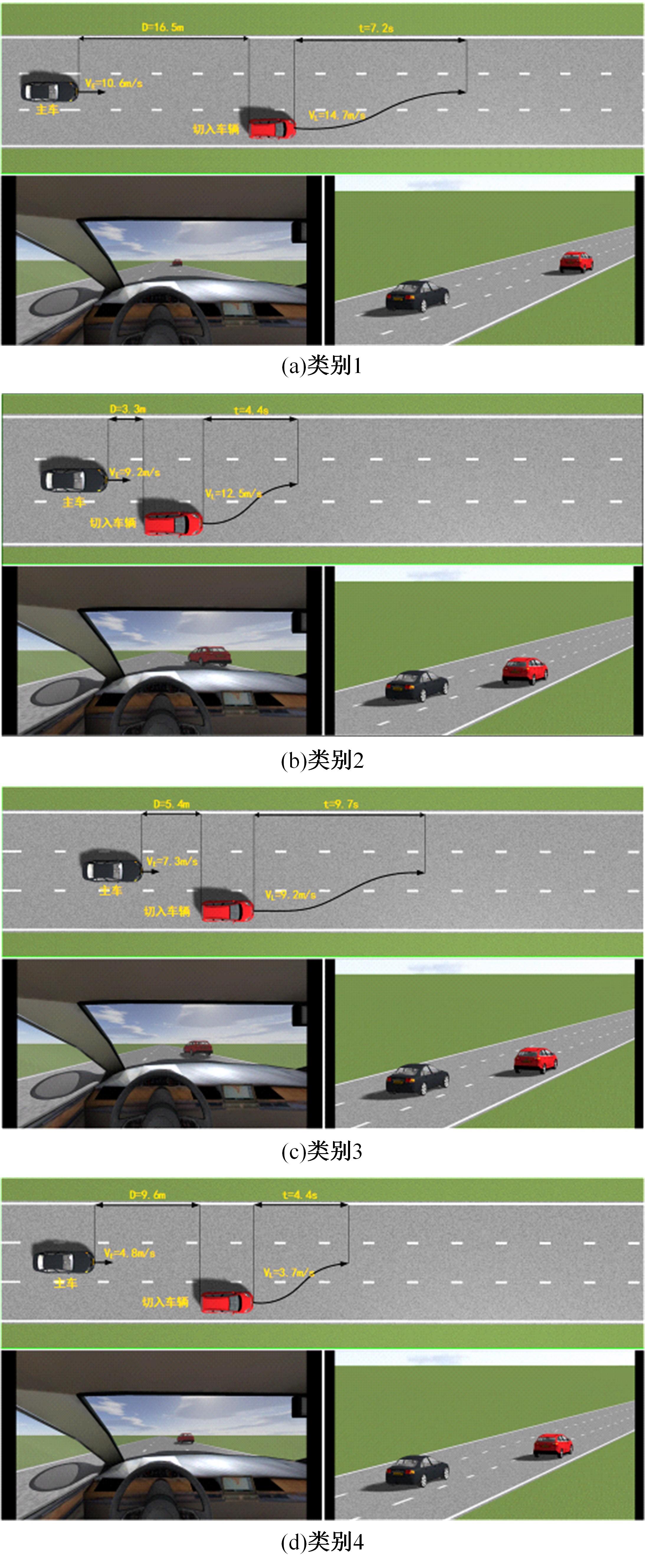
基于智能汽车虚拟测试技术对驾驶场景的构建需求,采用阈值法和人工验证法获得了59例变道切入行为数据;分析了差异化场景类型元素和连续场景元素对风险感知系数的影响,降维后得到与变道切入场景危险程度显著相关的4类场景要素:主车纵向速度、相对纵向速度、纵向距离和前车切入持续时间;采用层次聚类优化K-means算法聚类得到了4类城市道路变道切入场景,借助PreScan软件构建了基于自然驾驶数据的自动驾驶虚拟测试场景库。
中图分类号:
- U461.91




| 1 | 徐向阳, 胡文浩, 董红磊,等. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4): 610-619. |
| Xu Xiang-yang, Hu Wen-hao, Dong Hong-lei, et al. Review of key technologies for autonomous vehicle test scenario construction[J]. Automotive Engineering, 2021, 43(4): 610-619. | |
| 2 | 朱冰, 张培兴, 赵健,等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian, et al. Advances in scenario-based virtual testing of self-driving vehicles[J]. Chinese Journal of Highways, 2019, 32(6): 1-19. | |
| 3 | 朱冰,范天昕,赵健,等. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报: 工学版, 2022, 52(1): 1-8. |
| Zhu Bing, Fan Tian-xin, Zhao Jian, et al. Accelerated test method of automatic driving system based on dangerous boundary search[J]. Journal of Jilin University (Engineering Edition), 2022, 52(1): 1-8. | |
| 4 | Zhao D, Lam H, Peng H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(3): 595-607. |
| 5 | Hou Y, Edara P, Sun C. Situation assessment and decision making for lane change assistance using ensemble learning methods[J]. Expert Systems with Applications, 2015, 42(8): 2015-3875. |
| 6 | 中华人民共和国公安部交通管理局. 2015中华人民共和国道路交通事故统计年报[R]. 北京: 中华人民共和国公安部交通管理局, 2016. |
| 7 | Feng Z, Ma X, Zhu X, et al. Analysis of driver brake behavior under critical cut-in scenarios[C]∥ IEEE Intelligent Vehicles Symposium, New York, USA, 2018: 2054-2059. |
| 8 | 王雪松, 杨敏明. 基于自然驾驶数据的变道切入行为分析[J]. 同济大学学报: 自然科学版, 2018, 46(8): 1057-1063. |
| Wang Xue-song, Yang Min-ming. Analysis of lane change cut-in behavior based on natural driving data[J]. Journal of Tongji University (Natural Science Edition), 2018, 46(8): 1057-1063. | |
| 9 | 朱西产, 张佳瑞, 马志雄. 安全切入场景下的驾驶人初始制动时刻分析[J]. 中国公路学报, 2019, 32(6): 262-273. |
| Zhu Xi-chan, Zhang Jia-rui, Ma Zhi-xiong. Analysis of driver's initial braking moment under safety cut-in scenario[J]. Chinese Journal of Highways, 2019, 32(6): 262-273. | |
| 10 | Menzel T, Bagschik G, Maurer M. Scenarios for development, test and validation of automated vehicles[C]∥IEEE Intelligent Vehicles Symposium, New York, USA, 2018: 1-7. |
| 11 | Menzel T, Bagschik G, Isensee L, et al. From functional to logical scenarios: detailing a keyword-based scenario description for execution in a simulation environment[C]∥IEEE Intelligent Vehicles Symposium, Paris, France, 2019: 2383-2390. |
| 12 | 胡林, 易平, 黄晶, 等. 基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J]. 汽车工程, 2018, 40(12): 1436-1446. |
| Hu Lin, Yi Ping, Huang Jing, et al. Research on two-wheeled vehicle test scenarios of automatic emergency braking system based on real accident cases[J]. Automotive Engineering, 2018, 40(12): 1436-1446. | |
| 13 | 郭景华, 李克强, 王进, 等. 基于危险场景聚类分析的前车随机运动状态预测研究[J]. 汽车工程, 2020, 42(7): 847-853, 859. |
| Guo Jing-hua, Li Ke-qiang, Wang Jin, et al. Research on stochastic motion state prediction of front vehicle based on hazard scenario clustering analysis[J]. Automotive Engineering, 2020, 42(7): 847-853, 859. | |
| 14 | Kondoh T, Yamamura T, Kitazaki S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008, 1(2): 170-180. |
| 15 | 党睿娜. 具有换道辅助功能的车辆自适应巡航控制[D].北京: 清华大学车辆与运载学院, 2013. |
| Dang Rui-na. Adaptive cruise control for vehicles with lane change assist[D]. Beijing: School of Vehicles and Vehicles, Tsinghua University, 2013. | |
| 16 | Wu J, Du Y, Qi G, et al. Leveraging longitudinal driving behaviour data with data mining techniques for driving style analysis[J]. Iet Intelligent Transport Systems, 2015, 9(8): 792-801. |
| 17 | 金立生, 谢宪毅, 司法, 等. 考虑驾驶人特性的智能驾驶路径跟踪算法[J]. 汽车工程, 2021, 43(4): 553-561. |
| Jin Li-sheng, Xie Xian-yi, Si Fa, et al. Intelligent driving path tracking algorithm considering driver characteristics[J]. Automotive Engineering, 2021, 43(4): 553-561. | |
| 18 | Lv N, Wen J, Duan Z, et al. Vehicle trajectory prediction and cut-in collision warning model in a connected vehicle environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 966-981. |
| 19 | Wang X, Yang M, Hurwitz D. Analysis of cut-in behavior based on naturalistic driving data[J]. Accident Analysis and Prevention, 2019, 124: 127-137. |
| 20 | 王雪松, 徐晓妍. 基于自然驾驶数据的危险事件识别方法[J]. 同济大学学报: 自然科学版, 2020, 48(1): 51-59. |
| Wang Xue-song, Xu Xiao-yan. Hazardous event identification method based on natural driving data[J]. Journal of Tongji University (Natural Science Edition), 2020, 48(1): 51-59. | |
| 21 | Lv N, Duan Z, Ma C, et al. Safety margins-a novel approach from risk homeostasis theory for evaluating the impact of advanced driver assistance systems on driving behavior in near-crash events[J]. Journal of Intelligent Transportation Systems, 2020(1): 1-14. |
| 22 | 丁洁云, 党睿娜, 王建强, 等. 驾驶人换道决策分析及意图识别算法设计[J]. 清华大学学报: 自然科学版, 2015, 55(7): 769-774. |
| Ding Jie-yun, Dang Rui-na, Wang Jian-qiang, et al. Driver lane change decision analysis and intention recognition algorithm design[J]. Journal of Tsinghua University (Natural Science Edition), 2015, 55(7): 769-774. | |
| 23 | 李洪雪, 李世武, 孙文财, 等. 重型危险品半挂列车行驶工况的构建[J]. 吉林大学学报: 工学版, 2021, 51(5): 1700-1707. |
| Li Hong-xue, Li Shi-wu, Sun Wen-cai, et al. Construction of working conditions of heavy dangerous goods semi-trailer train[J].Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1700-1707. | |
| 24 | 李航. 统计学习方法[M]. 2版. 北京: 清华大学出版社, 2019. |
| 25 | 孙栋先. 基于自然驾驶数据的变道切入场景库构建研究[D]. 长春: 吉林大学交通学院, 2021. |
| Sun Dong-xian. Research on construction of cut-in scenario library based on naturalistic driving data[D]. Changchun: College of Transportation, Jilin University, 2021. | |
| 26 | 彭涛, 方锐, 刘兴亮, 等. 基于典型事故场景的雪天高速换道自动驾驶策略[J]. 吉林大学学报: 工学版, 2022, 52(11): 2558-2567. |
| Peng Tao, Fang Rui, Liu Xing-liang, et al. Automatic lane-changing driving strategy based on typical accident scenarios in snowy days[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(11): 2558-2567. |
| [1] | 姚荣涵,徐文韬,郭伟伟. 基于因子长短期记忆的驾驶人接管行为及意图识别[J]. 吉林大学学报(工学版), 2023, 53(3): 758-771. |
| [2] | 刘明,荣学文,李贻斌,张帅帅,尹燕芳,阮久宏. 基于地形聚类分析的移动机器人速度自适应控制[J]. 吉林大学学报(工学版), 2021, 51(4): 1496-1505. |
| [3] | 朱才华,孙晓黎,李岩. 站点分类下的城市公共自行车交通需求预测[J]. 吉林大学学报(工学版), 2021, 51(2): 531-540. |
| [4] | 高印寒, 张澧桐, 梁杰, 王智博, 姜文君. 基于客观心理声学参数的重型商用车车内异响噪声分析[J]. 吉林大学学报(工学版), 2016, 46(1): 43-49. |
| [5] | 韩玲, 张立斌, 安颖, 李春荣, SohelAnwar. 无级变速器电液控制系统关键技术[J]. 吉林大学学报(工学版), 2014, 44(5): 1247-1252. |
| [6] | 刘淑芬, 孟冬雪, 王晓燕. 的DBSCAN算法[J]. 吉林大学学报(工学版), 2014, 44(4): 1135-1139. |
| [7] | 韩成, 秦贵和, 宫宇, 张超, 薛耀红. 基于彩色结构光的三维重构方法[J]. 吉林大学学报(工学版), 2013, 43(05): 1343-1351. |
| [8] | 陈书明, 王登峰, 季枫, 苏丽俐, 雷应锋. 基于声场空间变换方法的轿车加速行驶车外噪声预测[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 45-50. |
| [9] | 李琦, 姜桂艳, 杨聚芬. 基于因子分析与聚类分析的交通事件自动检测算法融合[J]. , 2012, 42(05): 1191-1197. |
| [10] | 玄圣夷, 白海英, 左文杰, 宋传学. 基于横摆角速度预测的制动防抱死系统单轮修正控制策略[J]. 吉林大学学报(工学版), 2012, 42(02): 261-265. |
| [11] | 张杨, 刘昕晖. 铰接车体转向横摆稳定性[J]. 吉林大学学报(工学版), 2012, 42(02): 266-271. |
| [12] | 孙喜龙, 王登峰, 卢放, 陈晓斌. 基于提高轿车后面抗撞性能的后纵梁结构优化[J]. 吉林大学学报(工学版), 2011, 41(增刊2): 87-91. |
| [13] | 徐森1,2,卢志茂2,顾国昌2. 结合K均值和非负矩阵分解集成文本聚类算法[J]. 吉林大学学报(工学版), 2011, 41(4): 1077-1082. |
| [14] | 刘玉梅,苏建,曹晓宁,熊伟,宋学忠. 基于模糊数学的汽车悬架系统故障诊断方法[J]. 吉林大学学报(工学版), 2009, 39(增刊2): 220-0224. |
| [15] | 唐洪斌,王登峰 . 前端结构对正面安全气囊不起爆速度阈值的影响[J]. 吉林大学学报(工学版), 2008, 38(04): 773-777. |
|