吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1275-1286.doi: 10.13229/j.cnki.jdxbgxb.20230784
数据驱动的信号交叉口排队尾车驶离状态预测
卢凯明1,2( ),陈艳艳1,2,仝瑶1,2,张健1,2,李永行1,2(),罗莹1,2
),陈艳艳1,2,仝瑶1,2,张健1,2,李永行1,2(),罗莹1,2
- 1.北京工业大学 城市建设学部,北京 100124
2.北京工业大学 交通工程北京市重点实验室,北京 100124
Data-driven prediction of departure state for tail vehicles in queues at signalized intersections
Kai-ming LU1,2(),Yan-yan CHEN1,2,Yao TONG1,2,Jian ZHANG1,2,Yong-xing LI1,2(),Ying LUO1,2
- 1.School of Urban Transportation,Urban Construction Department,Beijing University of Technology,Beijing 100124,China
2.Beijing Key Laboratory of Traffic Engineering,Beijing University of Technology,Beijing 100124,China
摘要:
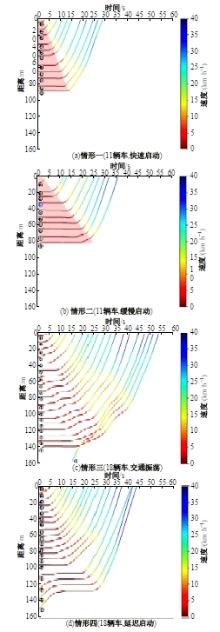
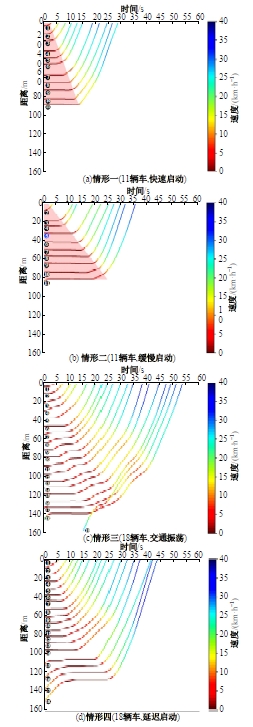
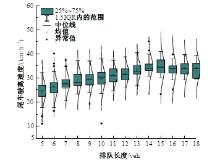
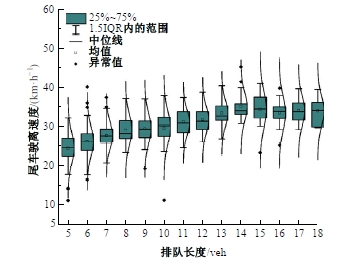
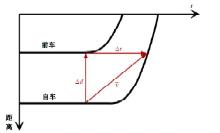
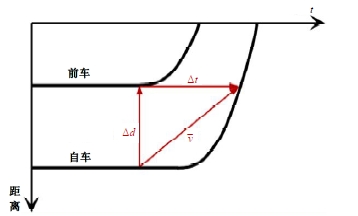
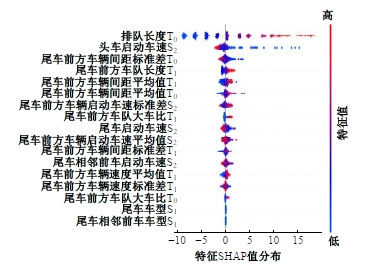
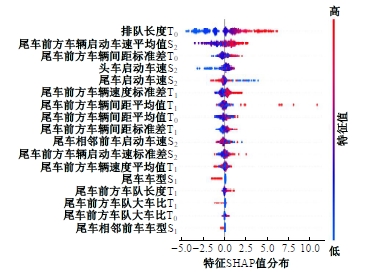
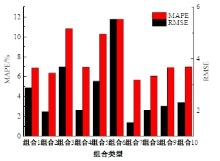
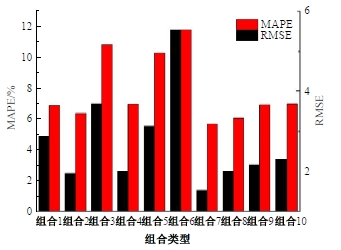
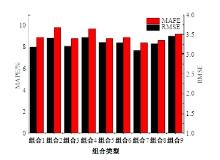
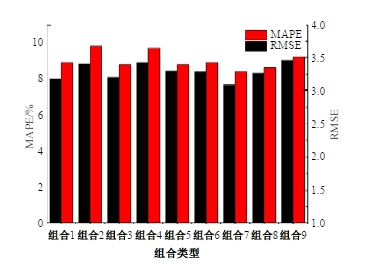
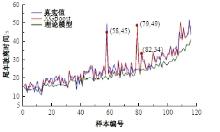
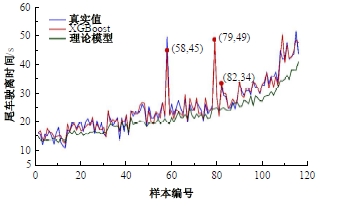
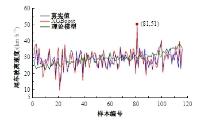
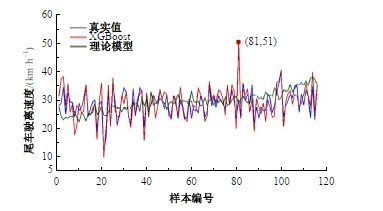
针对传统排队尾车驶离状态预测模型难以适应排队消散的不确定性问题,提出了一种轨迹数据驱动的排队尾车驶离状态预测模型。首先,分析排队消散轨迹形态及潜在影响因素,以揭示排队尾车驶离状态的不确定性。然后,从排队等待和车辆启动两个阶段入手,提出排队尾车驶离状态影响特征集。最后,基于极端梯度提升(XGBoost)算法构建排队尾车驶离状态预测模型,引入SHAP(SHapley Additive exPlanations)可解释机器学习框架解析所有特征的贡献度,并确定最优特征组合及模型参数。研究结果表明:本文基于XGBoost的尾车驶离时间预测模型平均绝对百分比误差(MAPE)为5.74%,比运动学模型预测精度提升约10%;尾车驶离速度预测模型MAPE为9.98%,比运动学模型预测精度提升约6%,且预测性能均优于随机森林、决策树和多层感知机神经网络3种常用机器学习方法。研究成果可为车路协同环境下交叉口信号相位最小绿灯时间调节与网联车辆生态驾驶提供技术支撑。
中图分类号:
- U491.1
| [1] | 徐洪峰, 王殿海. BRT优先控制交叉口的机动车相位固定最小绿灯时间计算方法[J]. 吉林大学学报: 工学版, 2009, 39(): 92-97. |
| Xu Hong-feng, Wang Dian-hai. Absolute minimum green calculation for vehicle phase at signalized intersections with bus rapid transit signal priority[J].Journal of Jilin University(Engineering and Technology Edition),2009, 39(Sup.1): 92-97. | |
| [2] | 刘东波, 沈莉潇, 代磊磊, 等. 基于多目标雷达数据的单点交通信号控制方法[J]. 吉林大学学报: 工学版, 2022, 52(10): 2456-2465. |
| Liu Dong-bo, Shen Li-xiao, Dai Lei-lei, et al. Traffic signal control method at isolated intersections based on multi-target radar data[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2456-2465. | |
| [3] | 刘显贵, 王晖年, 洪经纬, 等. 网联环境下信号交叉口车速控制策略及优化[J]. 交通运输系统工程与信息. 2021, 21(2): 82-90. |
| Liu Xian-gui, Wang Hui-nian, Hong Jing-wei, et al. Traffic speed control strategy and optimization at signalized intersections under connected environment [J]. Journal of Transportation Systems Engineering and Information Technology,2021, 21(2): 82-90. | |
| [4] | 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. |
| Yang Lan, Zhao Xiang-mo, Wu Guo-yuan, et al. A review of collaborative eco-driving strategies for intelligent connected vehicles[J]. Journal of Traffic and Transportation Engineering,2020, 20(5): 58-72. | |
| [5] | Luo Q, Yuan J, Chen X, et al. Analyzing start-up time headway distribution characteristics at signalized intersections[J]. Physica A: Statistical Mechanics and its Applications, 2019, 535: No.122348. |
| [6] | Mondal S, Gupta A. Discharge characteristics analysis of queued-up vehicles at signal-controlled intersections under heterogeneous traffic conditions[J]. International Journal of Civil Engineering, 2019, 17(5): 619-628. |
| [7] | Jin X, Zhang Y, Wang F, et al. Departure headways at signalized intersections: a log-normal distribution model approach[J]. Transportation Research Part C: Emerging Technologies,2009, 17(3): 318-327. |
| [8] | 唐克双, 董可然, 黄志荣, 等. 信号交叉口排队消散特性实证对比[J]. 同济大学学报: 自然科学版, 2015, 43(11): 1689-1695. |
| Tang Ke-shuang, Dong Ke-ran, Huang Zhi-rong, et al. Empirical comparison of queuing dissipation characteristics at signalized intersections[J]. Journal of Tongji University(Natural Science), 2015, 43(11): 1689-1695. | |
| [9] | Zhan X, Li R, Ukkusuri S V. Lane-based real-time queue length estimation using license plate recognition data[J]. Transportation Research Part C: Emerging Technologies,2015, 57: 85-102. |
| [10] | Mei Y, Gu W, Chung E C S, et al. A Bayesian approach for estimating vehicle queue lengths at signalized intersections using probe vehicle data[J]. Transportation Research Part C: Emerging Technologies, 2019, 109: 233-249. |
| [11] | 谈超鹏, 姚佳蓉, 唐克双. 基于抽样车辆轨迹数据的信号控制交叉口排队长度分布估计[J]. 中国公路学报. 2021, 34(11): 282-295. |
| Tan Chao-peng, Yao Jia-rong, Tang Ke-shuang. Queue length distribution estimation at signalized intersections based on sampled vehicle trajectory data[J]. China Journal of Highway and Transport,2021, 34(11): 282-295. | |
| [12] | He X, Liu H X, Liu X. Optimal vehicle speed trajectory on a signalized arterial with consideration of queue[J]. Transportation Research Part C: Emerging Technologies,2015, 61: 106-120. |
| [13] | Wu L, Ci Y, Wang Y, et al. Fuel consumption at the oversaturated signalized intersection considering queue effects: a case study in Harbin, China[J]. Energy, 2020, 192: No.116654. |
| [14] | Yang H, Rakha H, Ala M V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects[J]. IEEE Transactions on Intelligent Transportation Systems,2017, 18(6): 1575-1585. |
| [15] | Dong H, Zhuang W, Chen B, et al. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5457-5469. |
| [16] | Dong H, Zhuang W, Yin G, et al. Energy-optimal velocity planning for connected electric vehicles at signalized intersection with queue prediction[C]∥IEEE ASME International Conference on Advanced Intelligent Mechatronics(AIM), Boston, USA, 2020: 238-243. |
| [17] | Ye F, Hao P, Qi X, et al. Prediction-based eco-approach and departure at signalized intersections with speed forecasting on preceding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1378-1389. |
| [18] | 徐洪峰, 郑明明, 李克平. 机动车相位固定最小绿灯时间计算方法[J]. 公路交通科技, 2008(5): 105-110. |
| Xu Hong-Feng, Zheng Ming-ming, Li Ke-ping.Absolute minimum green time calculation for vehicle phase[J]. Journal of Highway and Transportation Research and Developmen, 2008(5): 105-110. | |
| [19] | Elefteriadou L. The highway capacity manual 6th edition: a guide for multimodal mobility analysis[J]. Institute of Transportation Engineers. 2016, 86(4): 14-18. |
| [20] | 罗小芹, 王殿海, 金盛. 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报:工学版, 2019, 49(3): 695-704. |
| Luo Xiao-qin, Wang Dian-hai, Jin Sheng. Traffic signal actuated control at isolated intersections for heterogeneous traffic[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 695-704. | |
| [21] | Shi X P, Wong Y D, Li M Z F, et al. A feature learning approach based on XGBoost for driving assessment and risk prediction[J]. Accident Analysis & Prevention, 2019, 129: 170-179. |
| [22] | Shi R, Xu X, Li J, et al. Prediction and analysis of train arrival delay based on XGBoost and Bayesian optimization[J]. Applied Soft Computing, 2021, 109:No. 107538. |
| [23] | 魏田正, 魏雯, 李海梅, 等. 基于XGBoost算法的危险场景驾驶行为模式分析及安全评估[J]. 交通信息与安全, 2022, 40(5): 53-60. |
| Wei Tian-zheng, Wei Wen, Li Hai-mei, et al. An analysis of driving behavior model and safety assessment under risky scenarios based on an XGBoost algorithm[J]. Journal of Transport Information and Safety, 2022, 40(5): 53-60. | |
| [24] | 赵晓华, 亓航, 姚莹, 等. 基于可解释机器学习框架的快速路立交出口风险预测及致因解析[J]. 东南大学学报:自然科学版, 2022, 52(1): 152-161. |
| Zhao Xiao-hua, Qi Hang, Yao Ying, et al. Risk prediction and causation analysis of expressway interchange exits based on interpretable machine learning framework[J]. Journal of Southeast University(Natural Science Edition),2022, 52(1): 152-161. | |
| [25] | Roger E, Torlay L, Gardette J, et al. A machine learning approach to explore cognitive signatures in patients with temporo-mesial epilepsy[J]. Neuropsychologia, 2020, 142: No.107455. |
| [26] | 陈秀锋, 田家斌, 石英杰, 等. 基于排队消散模型的干线协调控制[J]. 科学技术与工程, 2018, 18(10): 279-283. |
| Chen Xiu-feng, Tian Jia-bin, Shi Ying-jie, et al. Arterial coordination control based on queuing dissipation model[J]. Science Technology and Engineering, 2018, 18(10): 279-283. | |
| [27] | 赵巍, 徐汉清. 长周期倒计时信号控制对排队消散特性的影响[J]. 城市交通, 2016, 14(6): 67-74. |
| Zhao Wei, Xu Han-qing. Impacts of signal with long cycle and duration countdown on queue discharge at signalized intersections[J]. Urban Transport of China, 2016, 14(6): 67-74. | |
| [28] | 王殿海, 郭佳林, 蔡正义. 基于自动车牌识别数据的混合交通流饱和流率实时估计[J]. 交通运输系统工程与信息, 2021, 21(2): 37-43. |
| Wang Dian-hai, Guo Jia-lin, Cai Zheng-yi. Real-time estimation of saturated flow rate of mixed traffic flow based on automatic license plate recognition data[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(2): 37-43. |
| [1] | 潘义勇,徐家聪,尤逸文,全勇俊. 网约车出行需求影响因素多尺度空间异质性分析[J]. 吉林大学学报(工学版), 2025, 55(5): 1567-1575. |
| [2] | 周成栋,宋菲,赵小梅,姚俊杰. 基于多模式双动态演化的拥堵收费模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1319-1327. |
| [3] | 张河山,范梦伟,谭鑫,郑展骥,寇立明,徐进. 基于改进YOLOX的无人机航拍图像密集小目标车辆检测[J]. 吉林大学学报(工学版), 2025, 55(4): 1307-1318. |
| [4] | 秦严严,肖腾飞,罗钦中,王宝杰. 雾天高速公路车辆跟驰安全分析与控制策略[J]. 吉林大学学报(工学版), 2025, 55(4): 1241-1249. |
| [5] | 宋现敏,湛天舒,李海涛,刘博,张云翔. 考虑用户成本和泊位利用率的停车预约分配模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1287-1297. |
| [6] | 郭祎,魏书威,姜涛. 基于区位势能和多源数据的城市客运交通规划算法[J]. 吉林大学学报(工学版), 2025, 55(4): 1328-1335. |
| [7] | 潘义勇,徐翔宇. 数据不平衡的MobileViT网络交通事故严重程度预测模型[J]. 吉林大学学报(工学版), 2025, 55(3): 947-953. |
| [8] | 陈永恒,杨家伟,孙经宇. 借道左转交叉口的网联左转车辆最佳轨迹控制[J]. 吉林大学学报(工学版), 2025, 55(2): 614-622. |
| [9] | 陈发城,鲁光泉,林庆峰,张浩东,马社强,刘德志,宋会军. 有条件自动驾驶下驾驶人接管行为综述[J]. 吉林大学学报(工学版), 2025, 55(2): 419-433. |
| [10] | 何永明,冯佳,魏堃,万亚楠. 超高速公路曲线路段车辆制动侧滑影响因素分析[J]. 吉林大学学报(工学版), 2025, 55(2): 591-602. |
| [11] | 吴娇蓉,刘旭东. 不同住房类型空间单元的建成环境对通勤方式选择的影响分析[J]. 吉林大学学报(工学版), 2025, 55(2): 554-565. |
| [12] | 王长帅,徐铖铖,任卫林,彭畅,佟昊. 自动驾驶接管过程中驾驶能力恢复状态对交通流振荡特性的影响[J]. 吉林大学学报(工学版), 2025, 55(1): 150-161. |
| [13] | 张娜,陈峰,王剑坡,朱亚迪. 基于时空序列相似性的城轨乘客出行模式识别[J]. 吉林大学学报(工学版), 2024, 54(9): 2588-2599. |
| [14] | 周锡浈,宫贺,李敦敦,季彦婕,严杰. 建成环境对路内停车泊位使用率的非线性影响模型[J]. 吉林大学学报(工学版), 2024, 54(9): 2520-2530. |
| [15] | 严利鑫,曾涛,贺宜,郭军华,胡鑫辉. 共驾型智能车辆人机接管行为序列编码与解析[J]. 吉林大学学报(工学版), 2024, 54(9): 2547-2556. |
|