吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1307-1318.doi: 10.13229/j.cnki.jdxbgxb.20230779
基于改进YOLOX的无人机航拍图像密集小目标车辆检测
张河山1,2( ),范梦伟1,谭鑫1,郑展骥1,2,寇立明3,徐进1,2()
),范梦伟1,谭鑫1,郑展骥1,2,寇立明3,徐进1,2()
- 1.重庆交通大学 交通运输学院,重庆 400074
2.重庆交通大学 山区复杂道路环境“人-车-路”协同与安全重庆市重点实验室,重庆 400074
3.重庆市交通规划研究院,重庆 400074
Dense small object vehicle detection in UAV aerial images using improved YOLOX
He-shan ZHANG1,2(),Meng-wei FAN1,Xin TAN1,Zhan-ji ZHENG1,2,Li-ming KOU3,Jin XU1,2()
- 1.School of Traffic & Transportation,Chongqing Jiaotong University,Chongqing 400074,China
2.Chongqing Key Laboratory of "Human-Vehicle-Road" Cooperation and Safety for Mountain Complex Environment,Chongqing Jiaotong University,Chongqing 400074,China
3.Chongqing Transportation Planning and Research Institute,Chongqing 400074,China
摘要:
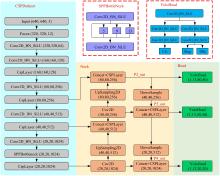
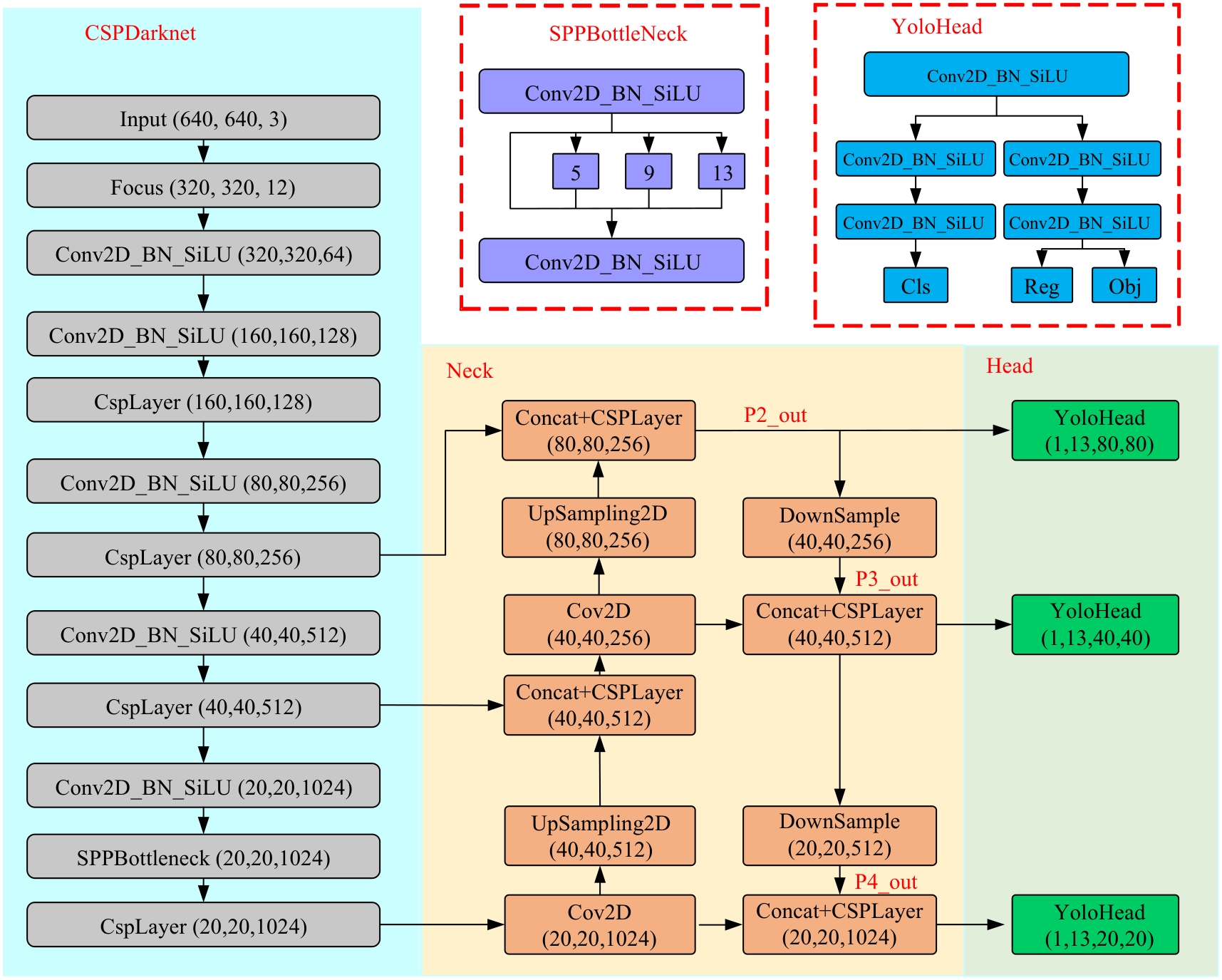
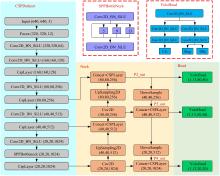
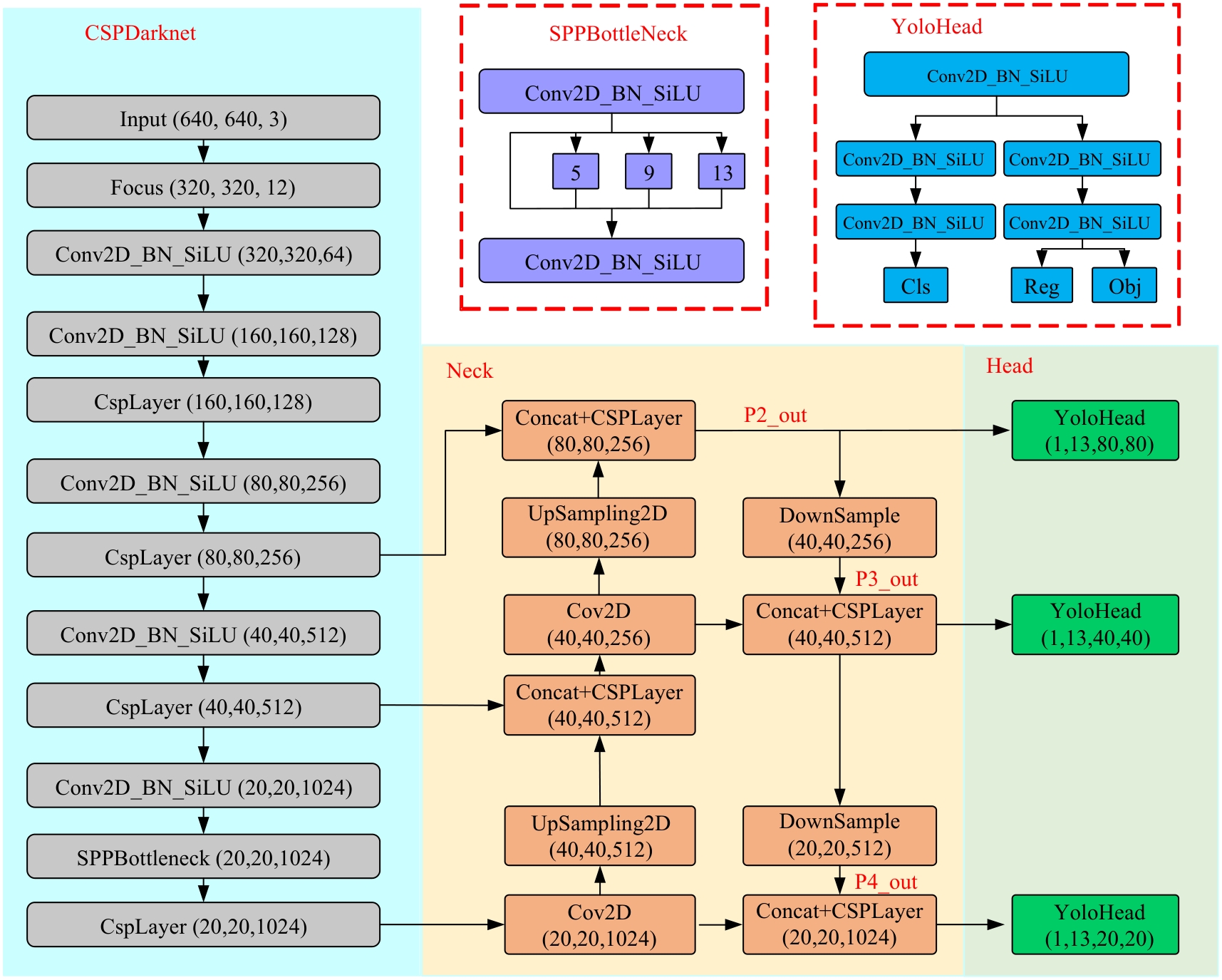
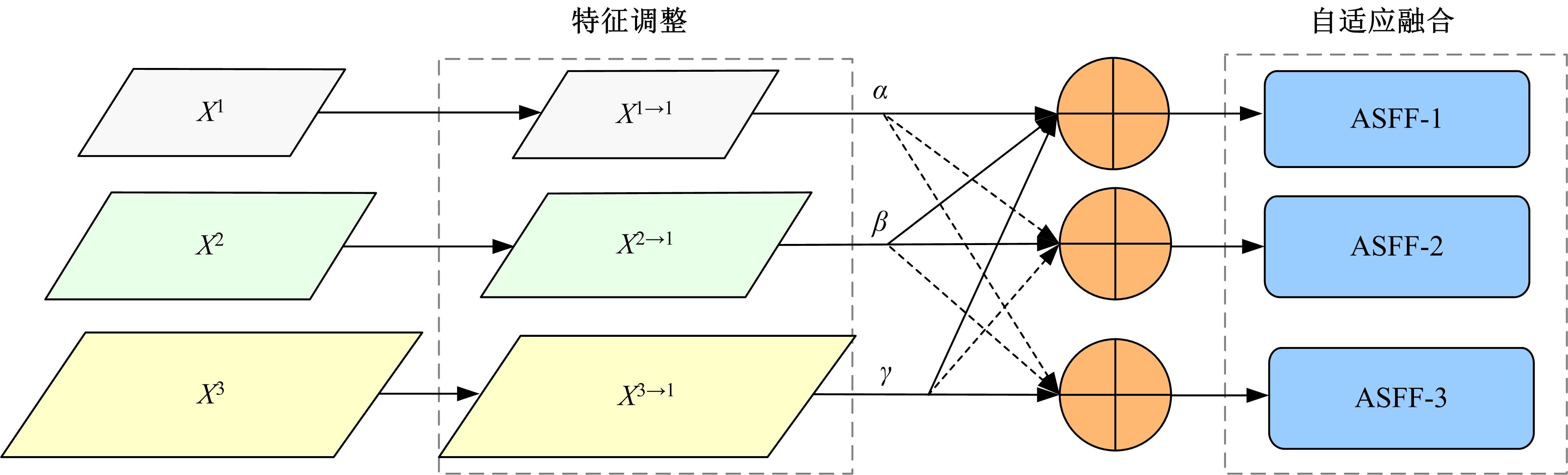
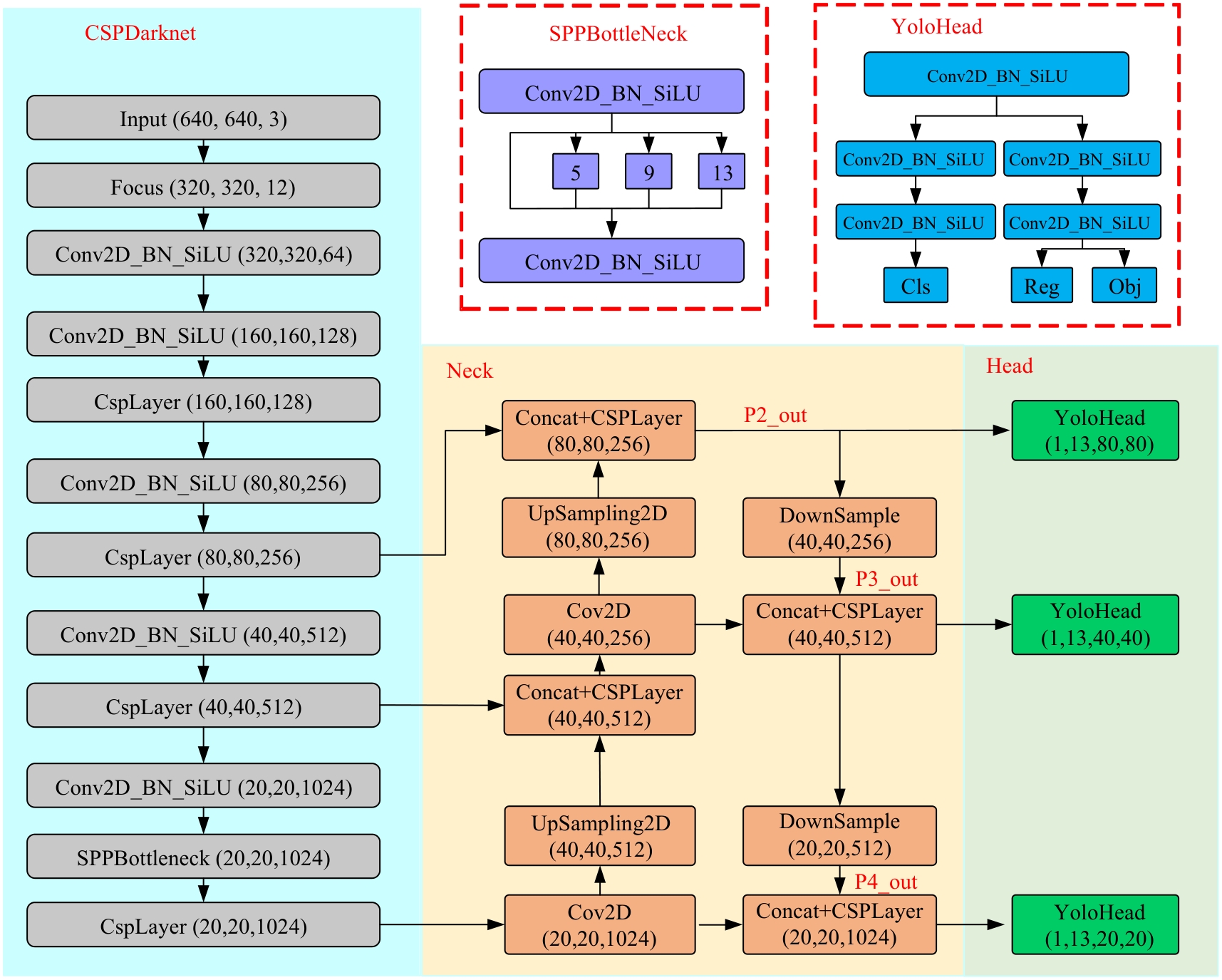
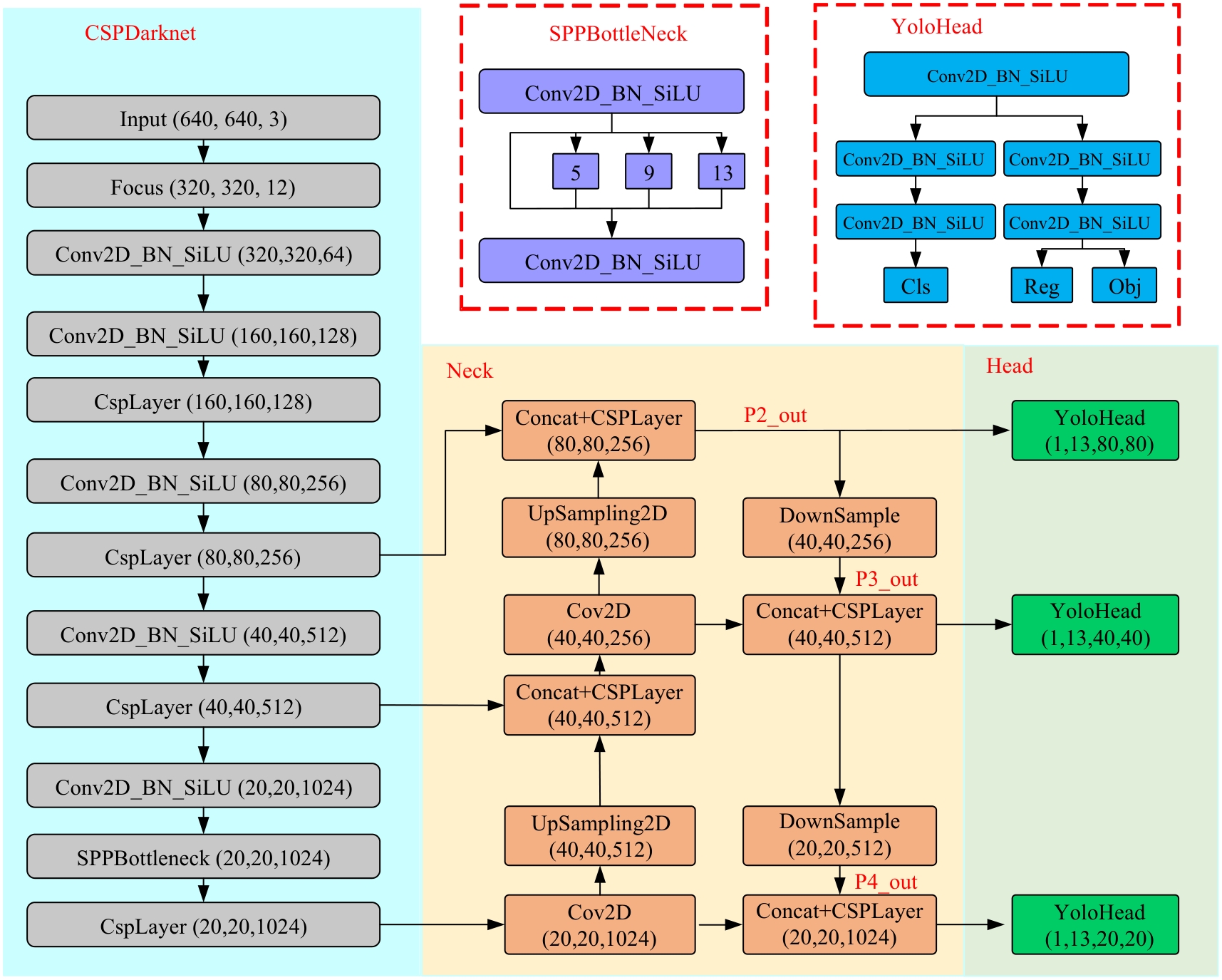
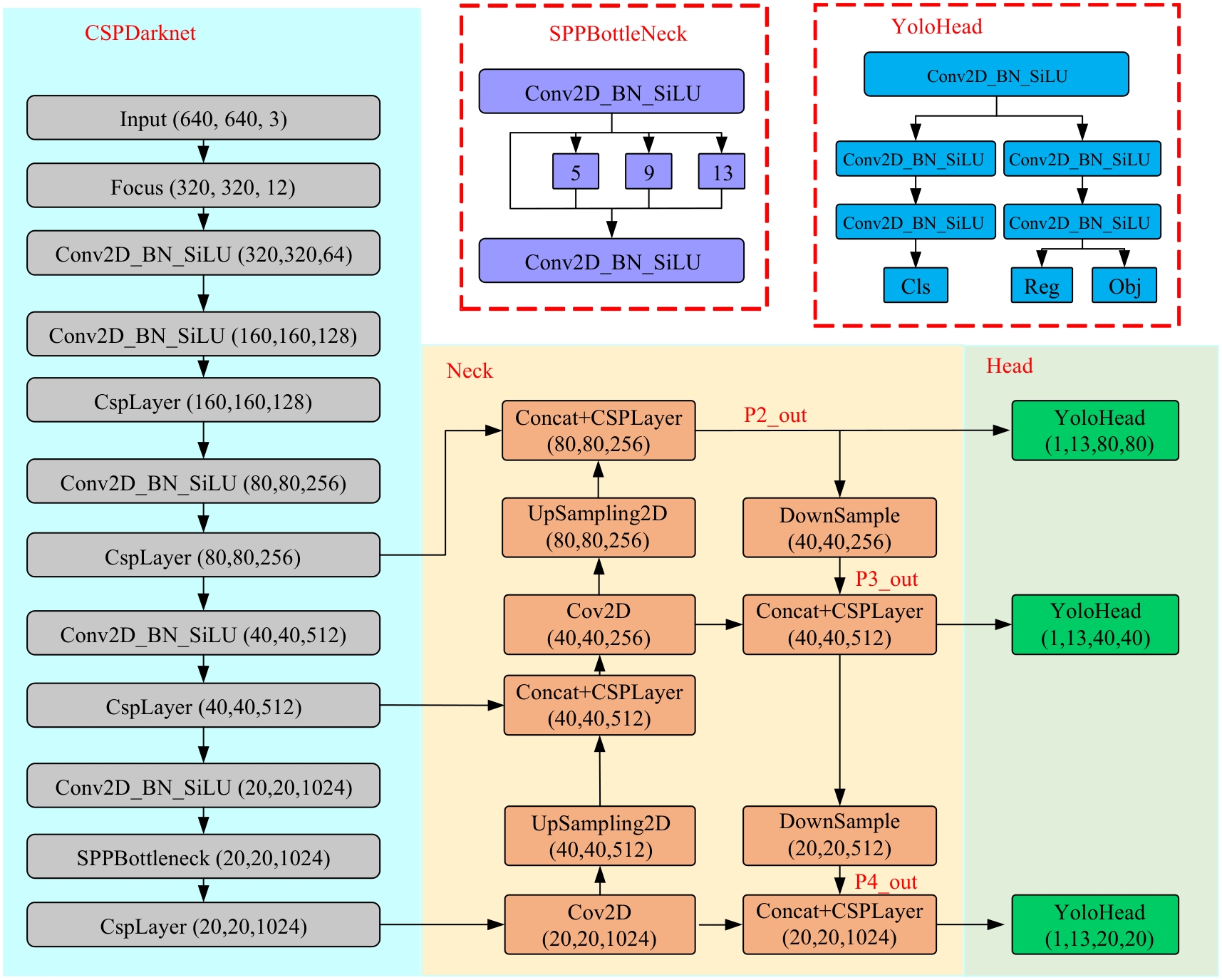
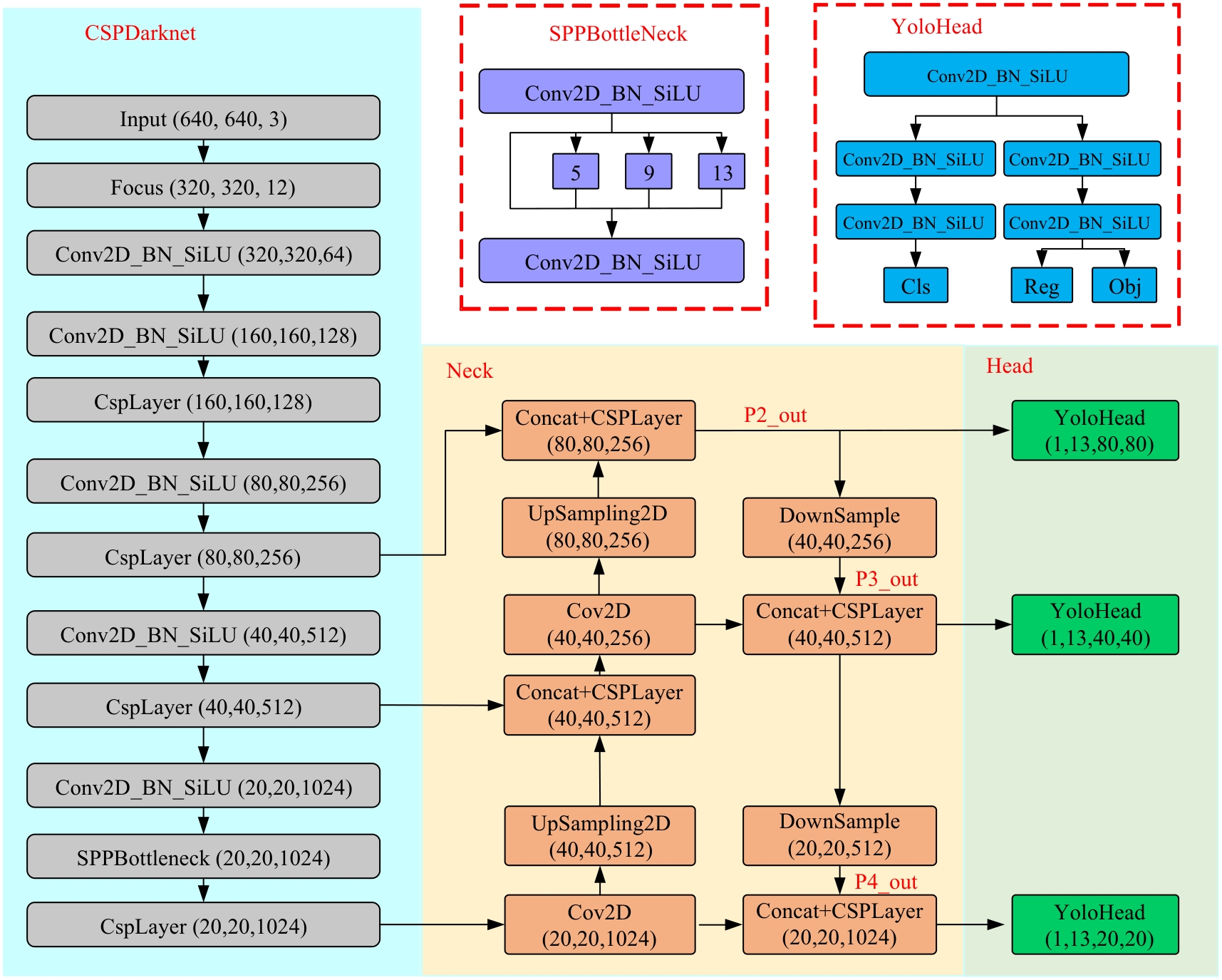
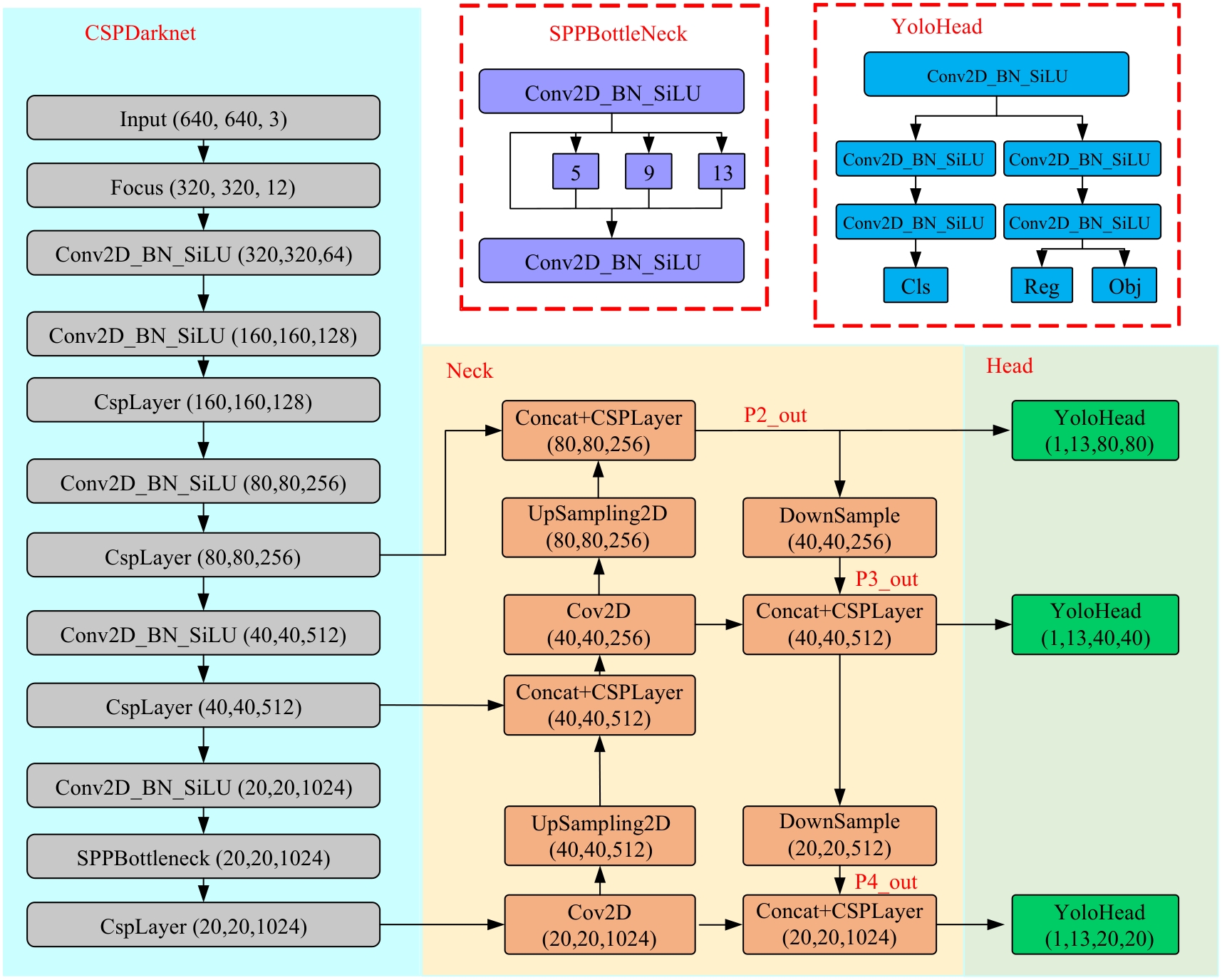
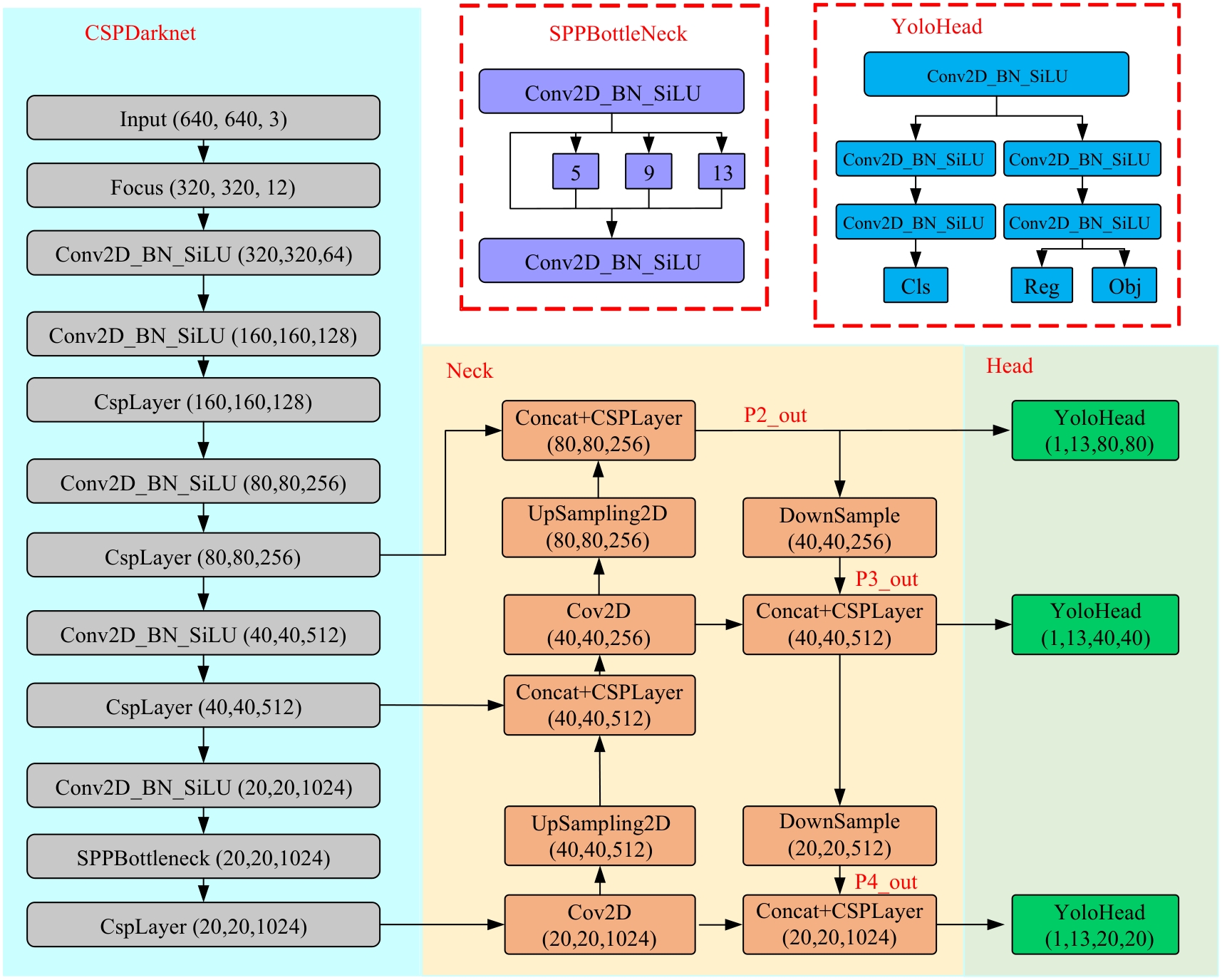
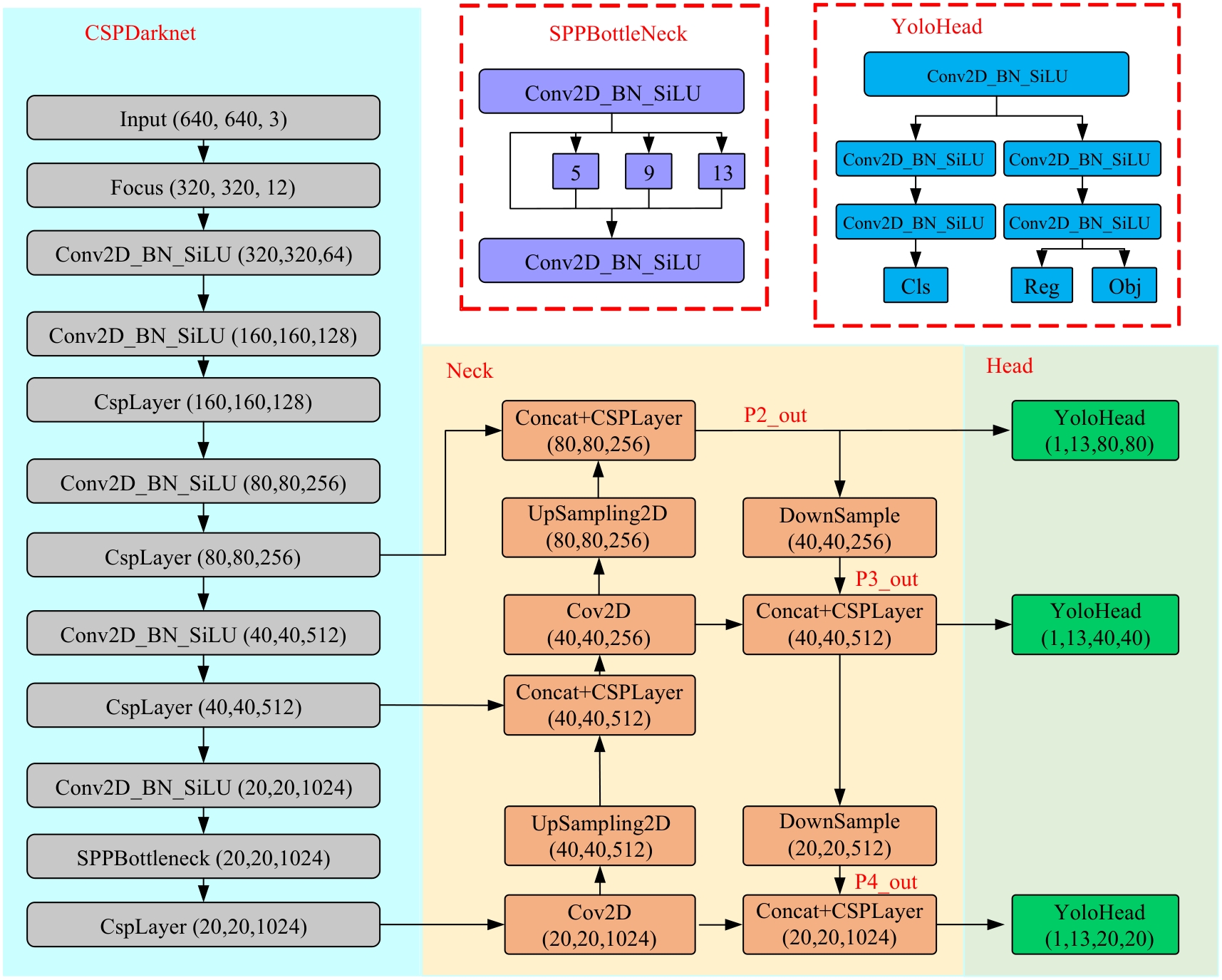
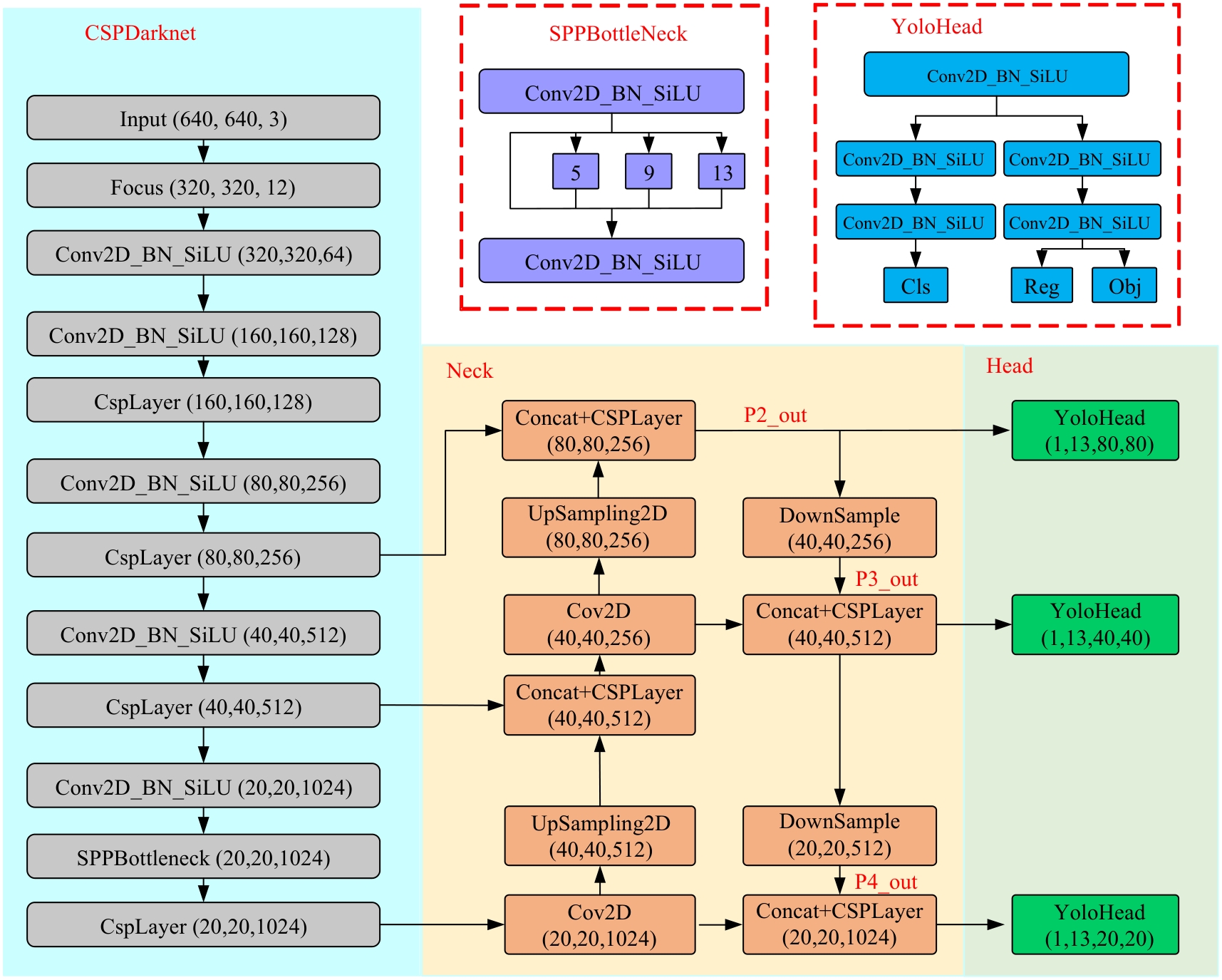
针对无人机航拍视角下对小目标的检测仍存在漏检现象严重、检测精度低等问题,提出一种改进的YOLOX网络,用于无人机航拍图像的检测。为了增强网络的特征学习能力,在特征融合部分引入自适应空间特征融合(ASFF)模块,并在网络的颈部(Neck)嵌入坐标注意力机制(CA)。为了加强网络对正样本的学习,将二元交叉熵损失函数替换为变焦距损失函数。实验结果表明:改进后的YOLOX网络具有更好的检测效能,其mAP@50和mAP@50_95分别达到了91.50%和79.65%。在多种交通场景下的可视化结果表明:相较于其他算法,优化后的网络具有更低的漏检率以及更高的检测精度,能够胜任小目标车辆的检测任务,可为高空视角下的车辆多目标跟踪应用提供参考。
中图分类号:
- U491

| 1 | Liu C, Yang D G, Tang L, et al. A lightweight object detector based on spatial-coordinate self-attention for UAV aerial images[J]. Remote Sensing, 2023, 15(1): No.83. |
| 2 | Liu W, Wang M, Zhang S, et al. Research on vehicle target detection technology based on UAV aerial images[C]∥IEEE International Conference on Mechatronics and Automation (ICMA), Guilin,China, 2022: 412-416. |
| 3 | 李旭, 宋世奇, 殷晓晴. 基于目标空间分布特征的无人机航拍车辆实时检测技术研究[J]. 中国公路学报, 2022, 35(12): 193-204. |
| Li Xu, Song Shi-qi, Yin Xiao-qing. Research on real-time detection technology of UAV aerial photography vehicles based on target spatial distribution characteristics[J]. China Journal of Highway and Transport, 2022, 35(12): 193-204. | |
| 4 | Girshic R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥IEEE Conference on Computer Vision and Pattern Recognition,Columbus, USA, 2014: 580-587. |
| 5 | Girshick R. Fast R-CNN[C]∥IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 2015: 1440-1448. |
| 6 | Ren S, He K, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 7 | Ge Z, Liu S, Wang F, et al. YOLOX: exceeding YOLO series in 2021[DB/OL]. [2023-06-27]. |
| 8 | Wang Y, Li J, Chen Z, et al. Ships' small target detection based on the CBAM-YOLOX algorithm[J]. Journal of Marine Science and Engineering, 2022, 10(12): No. 2013. |
| 9 | Shen C, Ma C, Gao W. Multiple attention mechanism enhanced YOLOX for remote sensing object detection[J]. Sensors, 2023, 23(3): No. 1261. |
| 10 | 赵振兵, 马迪雅, 石颖, 等. 基于改进YOLOX的变电站仪表外观缺陷检测算法[J]. 图学学报, 2023(5):937-946. |
| Zhao Zhen-bing, Ma Di-ya, Shi Ying, et al. Appearance defect detection algorithm for substation instrument based on improved YOLOX[J]. Journal of Graphics, 2023(5): 937-946. | |
| 11 | Yi K, Luo K, Chen T, et al. An improved YOLOX model and domain transfer strategy for nighttime pedestrian and vehicle detection[J]. Applied Sciences,2022, 12(23): No.12476. |
| 12 | Xiong C, Yu A, Yuan S, et al. Vehicle detection algorithm based on lightweight YOLOX[J]. Signal, Image and Video Processing, 2023, 17(5): 1793-1800. |
| 13 | Luo Q, Wang J, Gao M, et al. G-YOLOX: a lightweight network for detecting vehicle types[J]. Journal of Sensors, 2022, 2022: 1-10. |
| 14 | 黄键, 徐伟峰, 苏攀, 等. 基于YOLOX-S的车窗状态识别算法[J]. 吉林大学学报: 理学版, 2023, 61(4):875-882. |
| Huang Jian, Xu Wei-feng, Su Pan, et al. Window state recognition algorithm based on YOLOX-S[J].Journal of Jilin University (Science Edition), 2023, 61(4):875-882. | |
| 15 | Han S, Yoo J, Kwon S. Real-time vehicle-detection method in bird-view unmanned-aerial-vehicle imagery[J]. Sensors, 2019, 19(18): No.3958. |
| 16 | 刘军黎, 刘晓锋, 邱洁, 等. YOLOX-IM: 一种无人机航拍视频的轻量化交通参数提取模型[J]. 国外电子测量技术, 2023, 42(1): 159-169. |
| Liu Jun-li, Liu Xiao-feng, Qiu Jie,et al. YOLOX-IM:a lightweight traffic parameter extraction model for UAV aerial video[J].Foreign Electronic Measurement Technology, 2023, 42(1): 159-169. | |
| 17 | 张稀柳, 张晓玲, 何敏军. 基于改进YOLOX-s的车辆检测方法研究[J]. 系统仿真学报, 2024(2): 487-496. |
| Zhang Xi-liu, Zhang Xiao-ling, He Min-jun. Research on vehicle detection method based on improved YOLOX-s[J]. Journal of System Simulation, 2024(2):487-496. | |
| 18 | Peng H, Tan X. Improved YOLOX's anchor-free SAR image ship target detection[J].IEEE Access, 2022, 10: 70001-70015. |
| 19 | Luo X, Wu Y, Zhao L. YOLOD: a target detection method for UAV aerial imagery[J]. Remote Sensing, 2022, 14(14): No.3240. |
| 20 | Hu J, Shen L, Albanie S, et al. Squeeze-and-excitation networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(8): 2011-2023. |
| 21 | Woo S, Park J, Lee J Y, et al. CBAM: convolutional block attention module[C]∥European Conference on Computer Vision, Cham,Germany, 2018: 3-19. |
| 22 | Hou Q, Zhou D, Feng J. Coordinate attention for efficient mobile network design[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, USA,2021: 13708-13717. |
| 23 | Zhang F, Cao W, Wang S, et al. Improved YOLOv4 recognition algorithm for pitaya based on coordinate attention and combinational convolution[J]. Frontiers in Plant Science, 2022, 13:No.1030021. |
| 24 | Xuan W, Gao J Z, Hou B J, et al.A lightweight modified YOLOX network using coordinate attention mechanism for PCB surface defect detection[J]. IEEE Sensors Journal, 2022, 22(21): 20910-20920. |
| 25 | Song Z, Huang X, Ji C, et al. Deformable YOLOX: detection and rust warning method of transmission line connection fittings based on image processing technology[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-21. |
| 26 | Song C Y, Zhang F, Li J S, et al. Detection of maize tassels for UAV remote sensing image with an improved YOLOX model[J]. Journal of Integrative Agriculture, 2023, 22 (6): 1671-1683. |
| 27 | Qu Z, Shang X, Xia S F, et al. A method of single-shot target detection with multi-scale feature fusion and feature enhancement[J]. IET Image Processing, 2022, 16(6): 1752-1763. |
| 28 | Wang G, Liu Z, Sun H, et al. Yolox-BTFPN:an anchor-free conveyor belt damage detector with a biased feature extraction network[J]. Measurement, 2022, 200: No.111675. |
| 29 | Kumar S, Jain A, Rani S, et al. Deep neuralnetwork based vehicle detection and classification of aerial images[J]. Intelligent Automation & Soft Computing, 2022, 34(1): 119-131. |
| [1] | 潘义勇,徐家聪,尤逸文,全勇俊. 网约车出行需求影响因素多尺度空间异质性分析[J]. 吉林大学学报(工学版), 2025, 55(5): 1567-1575. |
| [2] | 卢凯明,陈艳艳,仝瑶,张健,李永行,罗莹. 数据驱动的信号交叉口排队尾车驶离状态预测[J]. 吉林大学学报(工学版), 2025, 55(4): 1275-1286. |
| [3] | 周成栋,宋菲,赵小梅,姚俊杰. 基于多模式双动态演化的拥堵收费模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1319-1327. |
| [4] | 秦严严,肖腾飞,罗钦中,王宝杰. 雾天高速公路车辆跟驰安全分析与控制策略[J]. 吉林大学学报(工学版), 2025, 55(4): 1241-1249. |
| [5] | 宋现敏,湛天舒,李海涛,刘博,张云翔. 考虑用户成本和泊位利用率的停车预约分配模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1287-1297. |
| [6] | 郭祎,魏书威,姜涛. 基于区位势能和多源数据的城市客运交通规划算法[J]. 吉林大学学报(工学版), 2025, 55(4): 1328-1335. |
| [7] | 潘义勇,徐翔宇. 数据不平衡的MobileViT网络交通事故严重程度预测模型[J]. 吉林大学学报(工学版), 2025, 55(3): 947-953. |
| [8] | 陈永恒,杨家伟,孙经宇. 借道左转交叉口的网联左转车辆最佳轨迹控制[J]. 吉林大学学报(工学版), 2025, 55(2): 614-622. |
| [9] | 陈发城,鲁光泉,林庆峰,张浩东,马社强,刘德志,宋会军. 有条件自动驾驶下驾驶人接管行为综述[J]. 吉林大学学报(工学版), 2025, 55(2): 419-433. |
| [10] | 何永明,冯佳,魏堃,万亚楠. 超高速公路曲线路段车辆制动侧滑影响因素分析[J]. 吉林大学学报(工学版), 2025, 55(2): 591-602. |
| [11] | 吴娇蓉,刘旭东. 不同住房类型空间单元的建成环境对通勤方式选择的影响分析[J]. 吉林大学学报(工学版), 2025, 55(2): 554-565. |
| [12] | 王长帅,徐铖铖,任卫林,彭畅,佟昊. 自动驾驶接管过程中驾驶能力恢复状态对交通流振荡特性的影响[J]. 吉林大学学报(工学版), 2025, 55(1): 150-161. |
| [13] | 张曦,库少平. 基于生成对抗网络的人脸超分辨率重建方法[J]. 吉林大学学报(工学版), 2025, 55(1): 333-338. |
| [14] | 张娜,陈峰,王剑坡,朱亚迪. 基于时空序列相似性的城轨乘客出行模式识别[J]. 吉林大学学报(工学版), 2024, 54(9): 2588-2599. |
| [15] | 周锡浈,宫贺,李敦敦,季彦婕,严杰. 建成环境对路内停车泊位使用率的非线性影响模型[J]. 吉林大学学报(工学版), 2024, 54(9): 2520-2530. |
|