吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (10): 3208-3220.doi: 10.13229/j.cnki.jdxbgxb.20231360
• 交通运输工程·土木工程 • 上一篇
基于轨迹数据的车辆博弈切出及汇入行为建模
曲大义1( ),戴守晨1,陈意成2,崔善柠2,杨宇翔2
),戴守晨1,陈意成2,崔善柠2,杨宇翔2
- 1.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
2.青岛理工大学 土木工程学院,山东 青岛 266520
Modeling of vehicle game cut-out and merging behavior based on trajectory data
Da-yi QU1(),Shou-chen DAI1,Yi-cheng CHEN2,Shan-ning CUI2,Yu-xiang YANG2
- 1.School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
2.School of Civil Engineering,Qingdao University of Technology,Qingdao 266520,China
摘要:
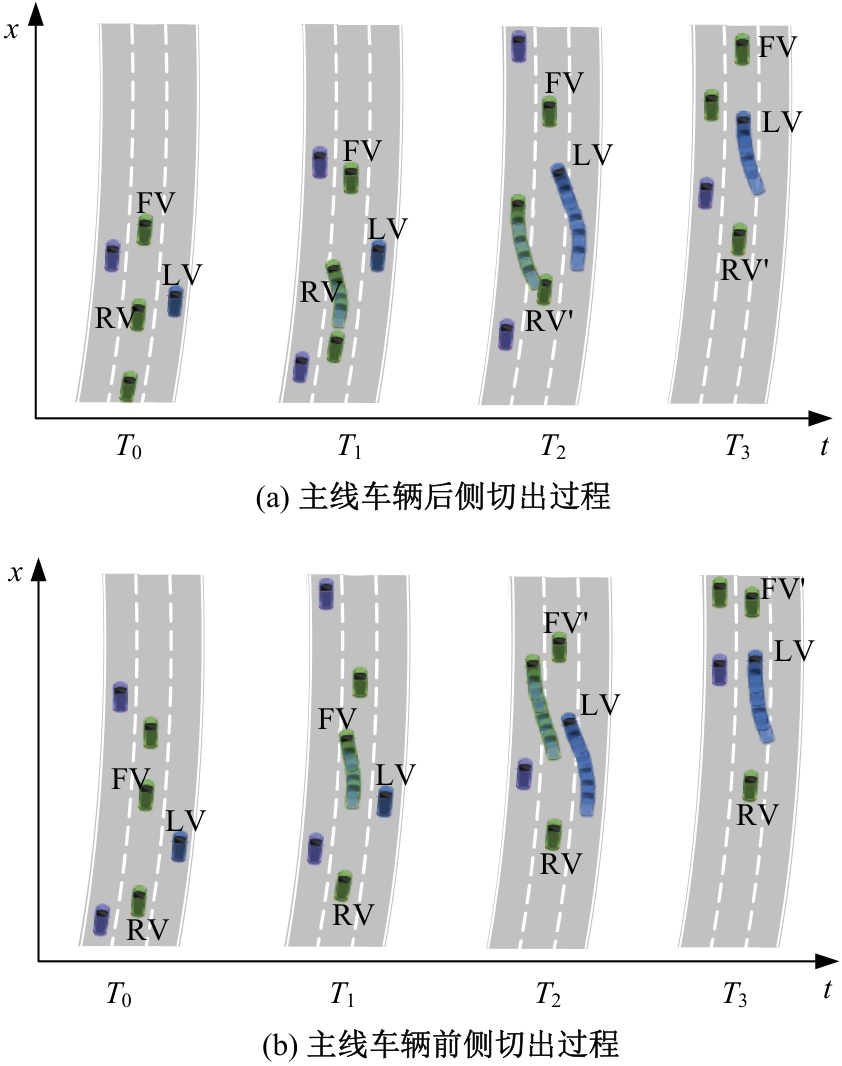
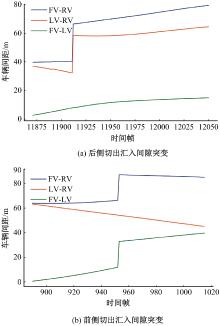
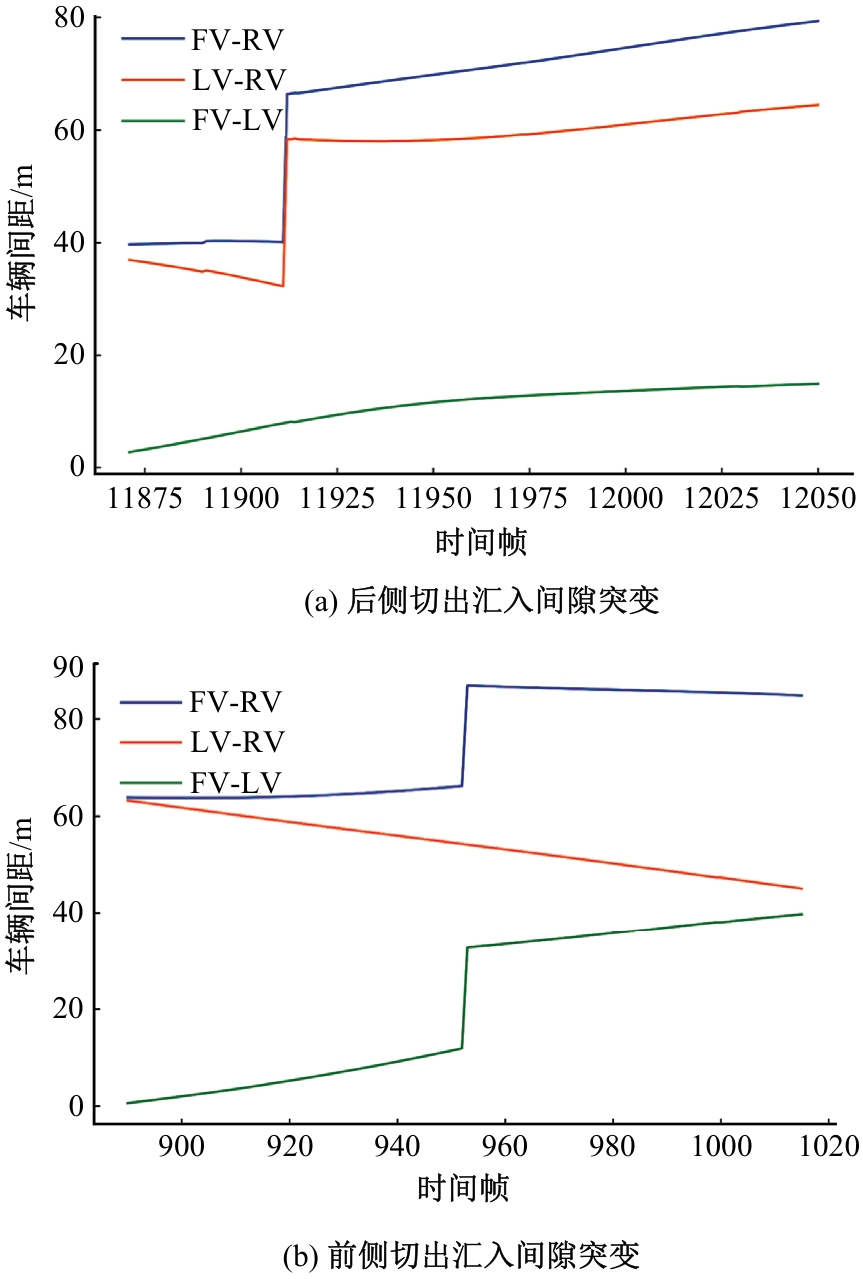
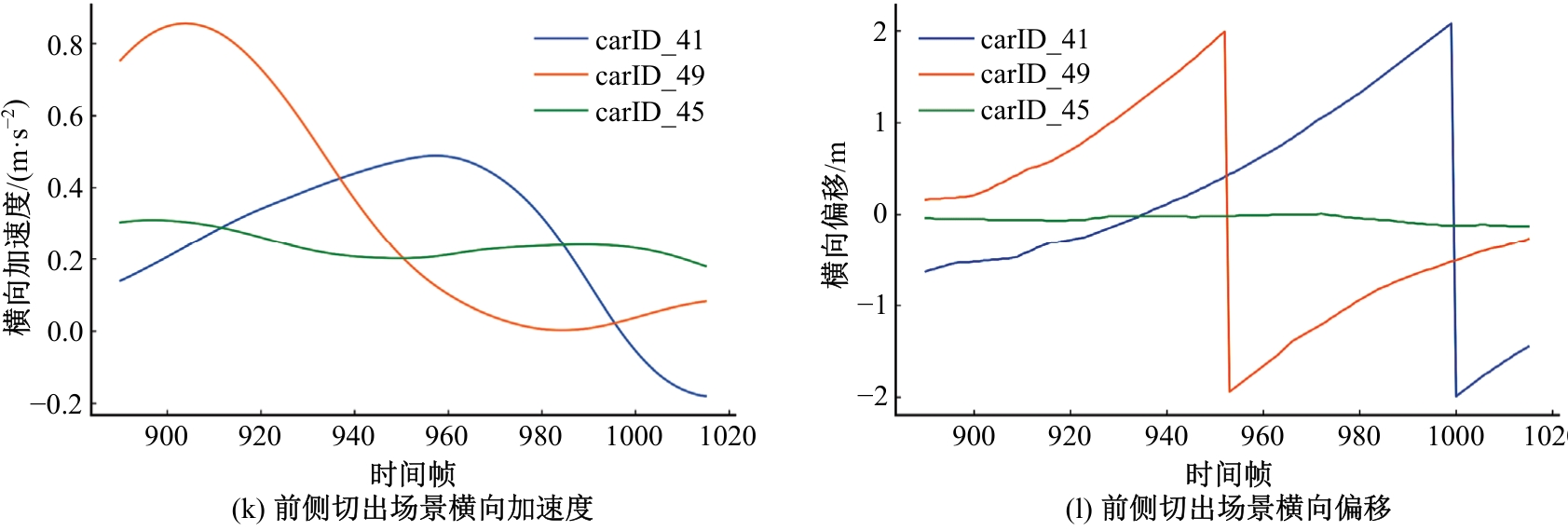
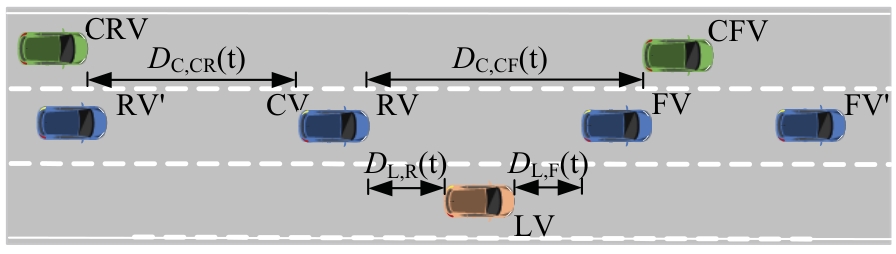
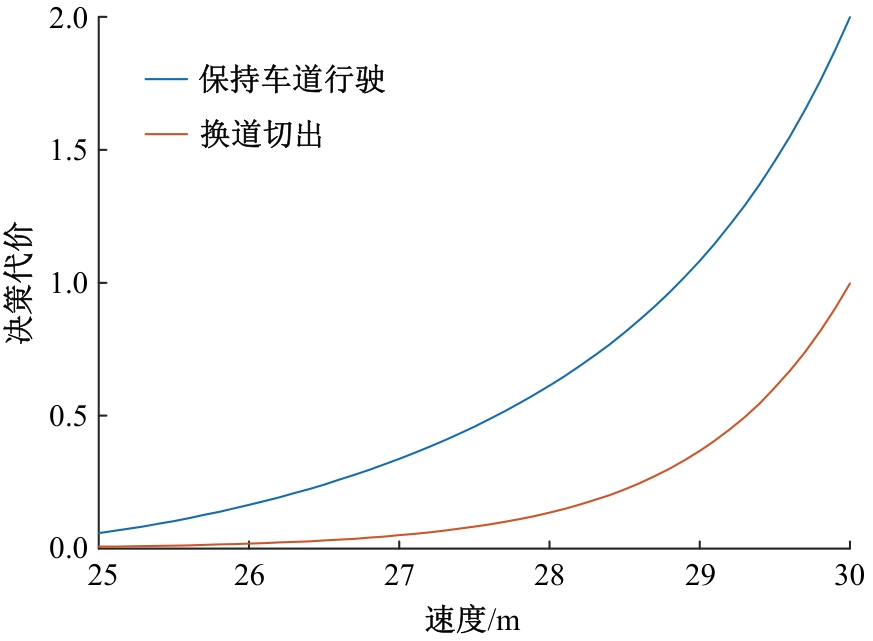
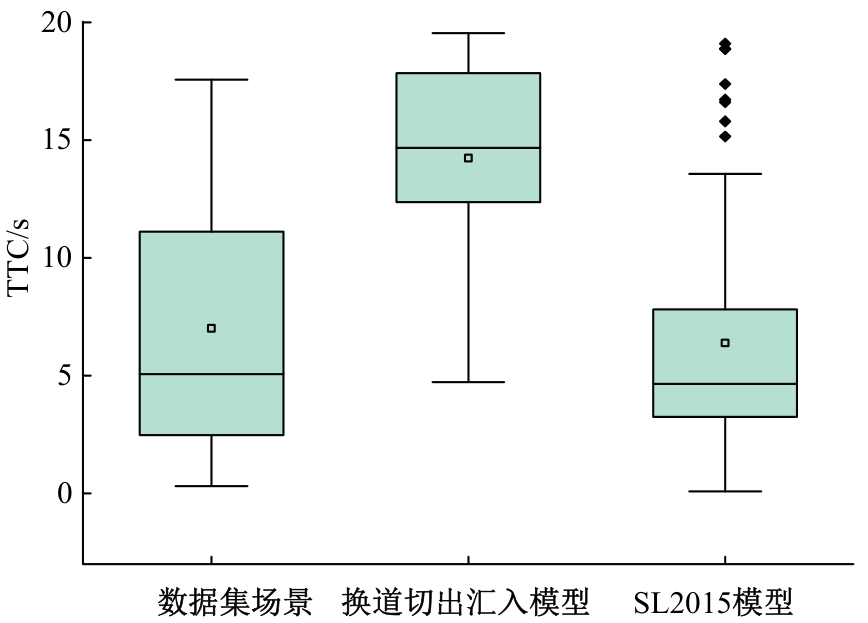
为提高网联自主车辆换道汇入的效率和安全性,刻画车辆换道行为的博弈交互过程。采用德国ExiD高精轨迹数据集,深入分析车辆换道汇入的动态交互博弈特性,从博弈决策和代价成本视角解析并定义轨迹数据中主线车辆的换道切出行为。在面对匝道车辆存在明确的汇入意图时,部分主线车辆为降低行驶效率代价选择加速向内侧换道切出且同时为匝道车辆提供汇入间隙。当车辆速度越高时主线车辆越倾向于换道切出降低损失,基于轨迹数据的车辆博弈切出及汇入模型能够刻画车辆博弈决策过程并有效缩短换道汇入距离,换道汇入距离平均缩短11.51 m,车辆碰撞风险时间平均提高6.77 s。
中图分类号:
- U491.2




| [1] | 郝威, 龚雅馨, 张兆磊, 等. 面向高速公路混合交通流的车辆协同合流策略[J]. 交通运输系统工程与信息, 2023, 23(1): 224-235. |
| Hao Wei, Gong Ya-xin, Zhang Zhao-lei, et al. Cooperative merging strategy for freeway ramp in a mixed traffic environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(1): 224-235. | |
| [2] | Ma C C, Wang J J, Wang S, et al. Research on a collaborative control strategy of an urban expressway merging bottleneck area[J]. Applied Sciences, 2022, 12(22): 11397-11422. |
| [3] | Liu J Q, Zhao W Z, Xu C. An efficient on-ramp merging strategy for connected and automated vehicles in multi-lane traffic[J]. Transactions on Intelligent Transportation Systems, 2022, 23(6): 5056-5067. |
| [4] | 曲大义, 黑凯先, 郭海兵, 等.车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报: 工学版, 2022, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the internet of vehicles environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(1): 101-109. | |
| [5] | 马庆禄, 闫浩, 聂振宇, 等. 匝道合流区智能网联车辆协同控制方法[J]. 吉林大学学报: 工学版, 2024,54(5):1332-1346. |
| Ma Qing-lu, Yan Hao, Nie Zhen-yu, et al. Cooperative control method for intelligent networked vehicles in ramp confluence area[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(5):1332-1346. | |
| [6] | 祁宏生, 应雨燕, 林俊山, 等. 混合自动驾驶场景多换道需求下的主动间隙适配和换道序列规划[J]. 交通运输工程与信息学报, 2021, 19(4): 36-51. |
| Qi Hong-sheng, Ying Yu-yan, Lin Jun-shan, et al. Proactive gap adaption and sequence planning for multiple lane-changing requests under mixed autonomous vehicle flow[J]. Journal of Transportation Engineering and Information, 2021, 19(4): 36-51. | |
| [7] | Wang Z, Zhao X M, Chen Z W, et al. A dynamic cooperative lane-changing model for connected and autonomous vehicles with possible accelerations of a preceding vehicle[J]. Expert Systems With Applications, 2021, 173(1): 114675-114693. |
| [8] | 张方方, 王长君, 王俊骅. 城市快速路匝道合流区车辆交互行为模式[J]. 中国公路学报, 2022, 35(9): 66-79. |
| Zhang Fang-fang, Wang Chang-jun, Wang Jun-ye. Vehicle interaction patterns on-ramp merging area of urban expressway[J]. China Journal of Highway and Transport, 2022, 35(9): 66-79. | |
| [9] | 叶颖俊, 倪颖, 孙剑. 高密度瓶颈交通流主动-回应汇入行为定义与建模[J]. 中国公路学报, 2022, 35(8): 278-290. |
| Ye Ying-jun, Ni Ying, Sun Jian. Defining and modeling active-responsive merging behavior at high-density expressway on-ramp bottlenecks[J]. China Journal of Highway and Transport, 2022, 35(8): 278-290. | |
| [10] | 邬岚, 赵乐, 李根. 基于方差异质性随机参数模型的汇合行为分析[J]. 吉林大学学报: 工学版, 2024, 54(4) : 883-889. |
| Wu Lan, Zhao Le, Li Gen. Analysis of merging behavior based on random parameter model with heterogeneity in variances[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54 (4) : 883-889. | |
| [11] | Moers T, Vater L, Krajewski R, et al. The exiD dataset: a real-world trajectory dataset of highly interactive highway scenarios in germany[C]∥IEEE Intelligent Vehicles Symposium, Aachen, Germany, 2022: 958-964. |
| [12] | Arbis D, Dixit V. Game theoretic model for lane changing: incorporating conflict risks[J]. Accident Analysis and Prevention, 2019, 125(1): 158-164. |
| [13] | Xu H L, Zhang Y G, Cassandras C, et al. A bi-level cooperative driving strategy allowing lane changes[J]. Transportation Research Part C: Emerging Technologies, 2020, 120(1) : 102773-102790. |
| [14] | 郝威, 张兆磊, 吴其育, 等. 网联自动驾驶车辆下匝道换道决策模型[J]. 交通运输工程学报, 2023, 23(5): 242-252. |
| Hao Wei, Zhang Zhao-lei, Wu Qi-yu, et al. Lane-changing decision model of connected and automated vehicles driving off ramp[J]. Journal of Traffic and Transportation Engineering, 2023, 23(5): 242-252. | |
| [15] | Hang P, Lv C, Xing Y, et al. Human-like decision making for autonomous driving: a noncooperative game theoretic approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 2076-2087. |
| [16] | Milanes V, Shladover S. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48(1): 285-300. |
| [17] | Ward J, Agamennoni G, Worrall S, et al. Extending time to collision for probabilistic reasoning in general traffic scenarios[J]. Transportation Research Part C: Emerging Technologies, 2015, 51(1): 66-82. |
| [1] | 张毅,陈莎雯,陈艳,范翔宇,王思祺,吴欢,焦鹏飞. 高速公路机电设备动态运维评价及预测性维护[J]. 吉林大学学报(工学版), 2026, 56(1): 170-182. |
| [2] | 孙峣,白东轩,姚宝珍,白子建. 基于渗流理论的港城交通网络特征分析[J]. 吉林大学学报(工学版), 2026, 56(1): 199-208. |
| [3] | 贾洪飞,庄博,罗清玉,刘玲,黄秋阳. 积水条件下城市路网性能恢复决策优化[J]. 吉林大学学报(工学版), 2025, 55(9): 2969-2977. |
| [4] | 王东,李宇暄,吴欢,宗芳. 基于随机森林的智能网联汽车开放测试道路评级算法[J]. 吉林大学学报(工学版), 2025, 55(9): 2998-3006. |
| [5] | 何庆龄,裴玉龙,侯琳,刘静,潘胜. 混合策略改进WOA-BiLSTM的快速路出口匝道车速预测[J]. 吉林大学学报(工学版), 2025, 55(6): 2038-2049. |
| [6] | 徐慧智,郝东升,徐小婷,蒋时森. 基于深度学习的高速公路小目标检测算法[J]. 吉林大学学报(工学版), 2025, 55(6): 2003-2014. |
| [7] | 岳昊,常笑,刘建业,曲秋莳. 引入车辆窗的定制公交线路优化[J]. 吉林大学学报(工学版), 2025, 55(4): 1266-1274. |
| [8] | 孟祥海,王国锐,张明扬,田毕江. 基于选择集成的山区高速事故预测模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1298-1306. |
| [9] | 吴文静,邓淳淳,贾洪飞,孙舒航. 内涝影响下路网畅通可靠度评估及关键路段识别[J]. 吉林大学学报(工学版), 2025, 55(4): 1250-1257. |
| [10] | 李昱燃,汪飞,朱才华,韩飞,李岩. 污染天气居民通勤模式选择影响因素的链式效用[J]. 吉林大学学报(工学版), 2025, 55(2): 577-590. |
| [11] | 高天洋,胡大伟,姜瑞森,吴雪,刘慧甜. 基于模块化车辆的区域灵活接驳公交线路优化[J]. 吉林大学学报(工学版), 2025, 55(2): 537-545. |
| [12] | 马书红,张俊杰,陈西芳,廖国美. 利用出租车时序数据识别城市功能区[J]. 吉林大学学报(工学版), 2025, 55(2): 603-613. |
| [13] | 徐慧智,蒋时森,王秀青,陈爽. 基于深度学习的车载图像车辆目标检测和测距[J]. 吉林大学学报(工学版), 2025, 55(1): 185-197. |
| [14] | 郑长江,陶童统,陈志超. 基于流量可调重分配的级联失效模型[J]. 吉林大学学报(工学版), 2024, 54(9): 2441-2450. |
| [15] | 周荣贵,高沛,李雨璇,周建. 基于轨迹数据的高速公路小客车异常驾驶行为[J]. 吉林大学学报(工学版), 2024, 54(9): 2581-2587. |
|
||