吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3429-3445.doi: 10.13229/j.cnki.jdxbgxb.20240149
• 综述 •
基于深度学习的多目标跟踪研究进展综述
姜来为1( ),王策2,杨宏宇1
),王策2,杨宏宇1
- 1.中国民航大学 安全科学与工程学院,天津 300300
2.中国民航大学 计算机科学与技术学院,天津 300300
Review of multi-object tracking based on deep learning
Lai-wei JIANG1(),Ce WANG2,Hong-yu YANG1
- 1.School of Safety Science and Engineering,Civil Aviation University of China,Tianjin 300300,China
2.School of Computer Science and Technology,Civil Aviation University of China,Tianjin 300300,China
摘要:
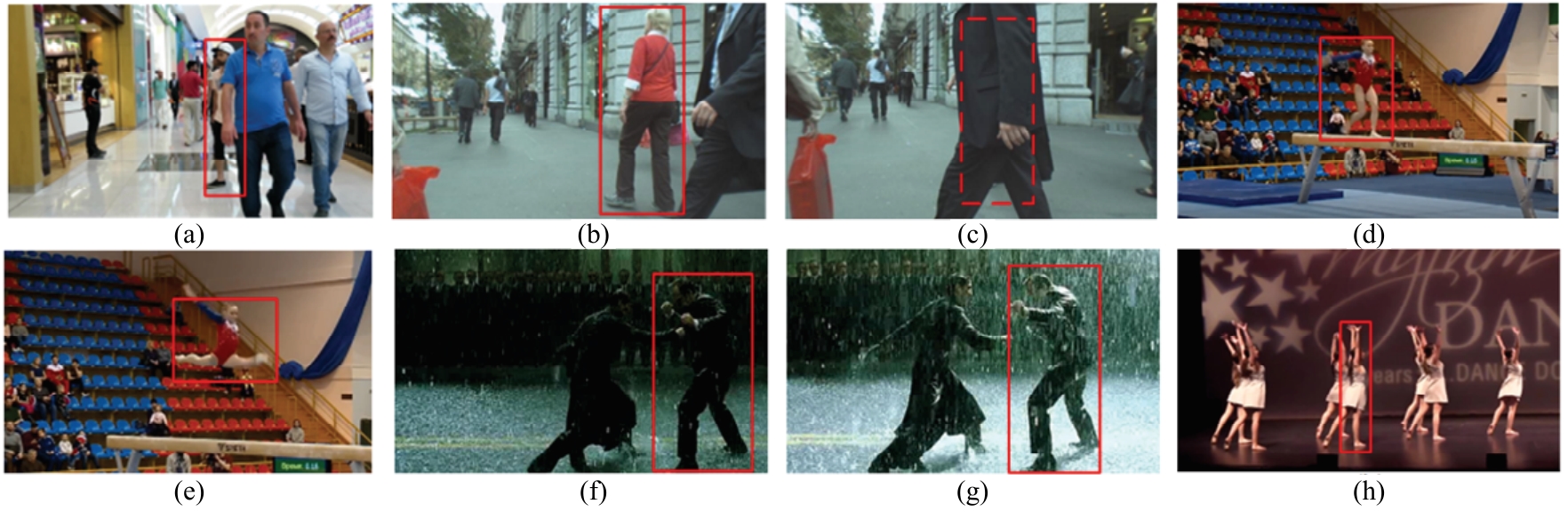
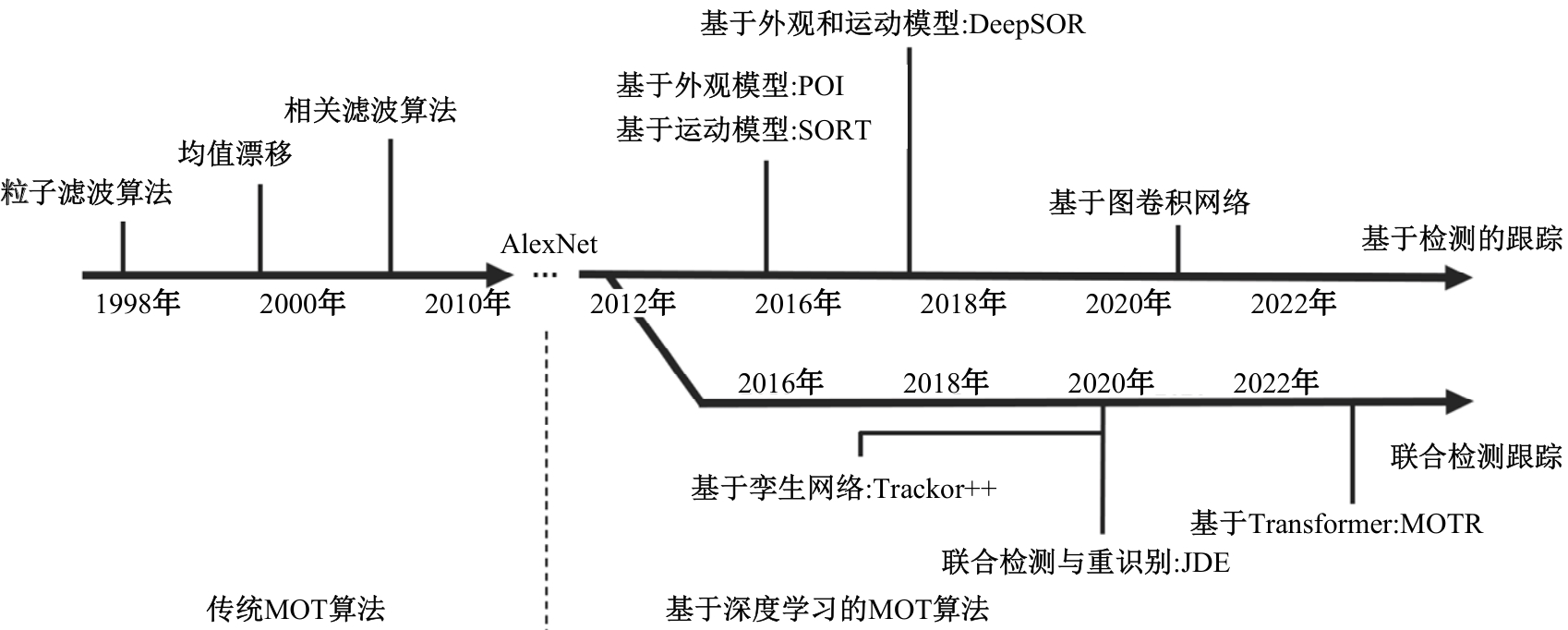
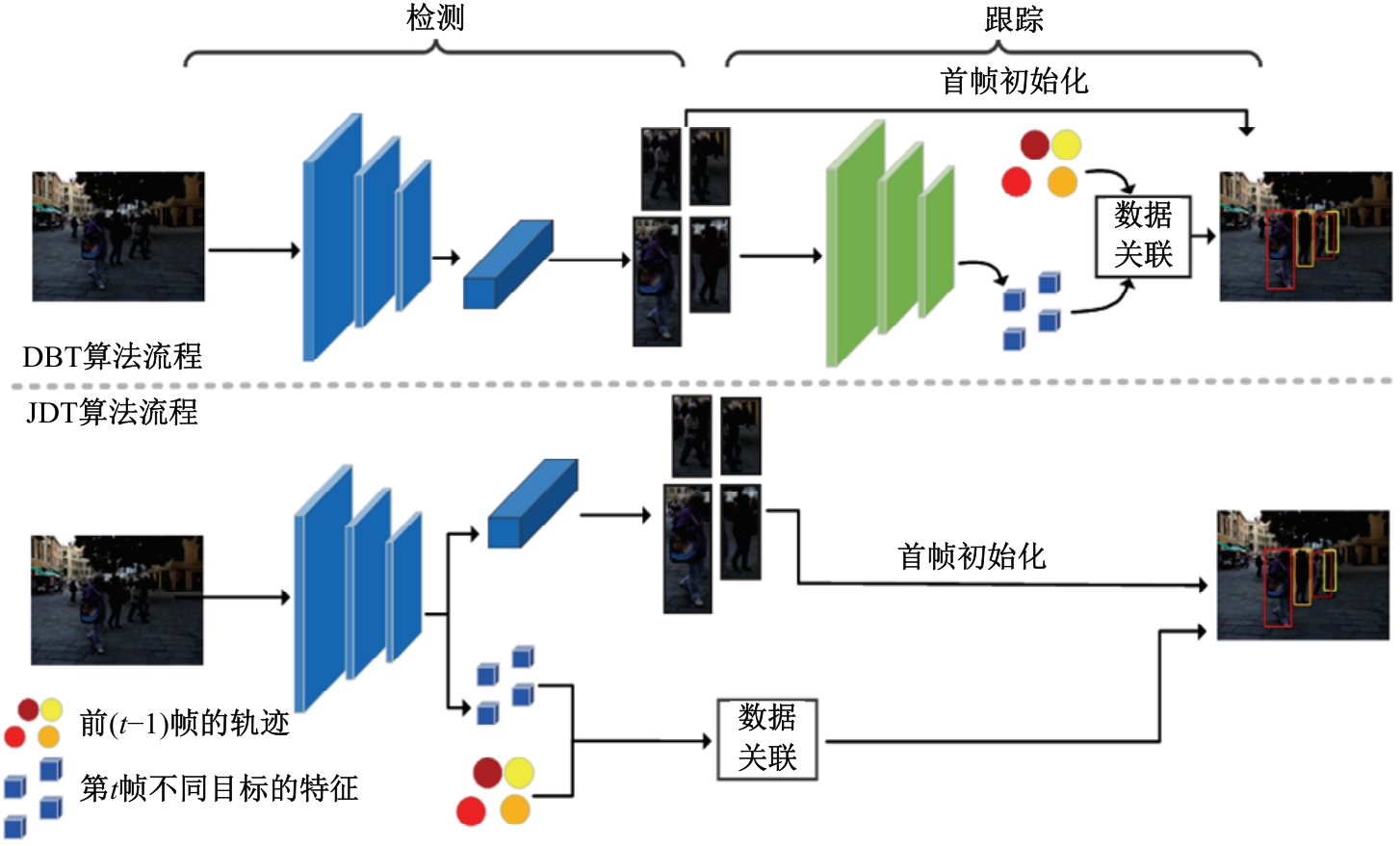
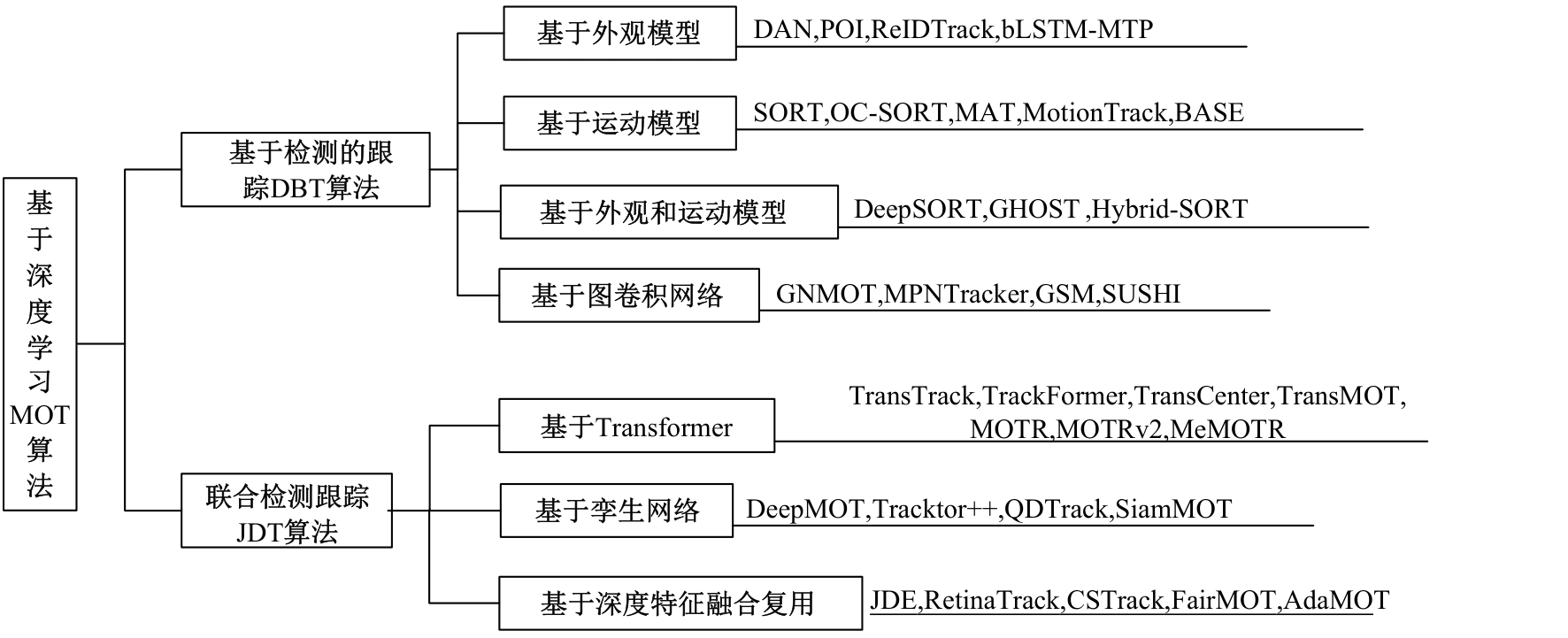
本文首先指出多目标跟踪任务面临的挑战和传统方法的局限性,其次对基于检测的跟踪和联合检测跟踪两类算法进行文献综述与分析,然后对多目标跟踪算法常用的评估指标和公开的数据集进行归纳,并对两类算法的性能进行比较分析,最后立足于当前研究现状对有待解决的问题和未来研究重点做出预测和展望。
中图分类号:
- TP391



| [1] | 金沙沙, 龙伟, 胡灵犀, 等. 多目标检测与跟踪算法在智能交通监控系统中的研究进展[J]. 控制与决策, 2023, 38(4): 890-901. |
| Jin Sha-sha, Long Wei, Hu Ling-xi,et al. Research progress of detection and multi-object tra-cking algorithm in intelligent traffic monitoring system[J]. Control and Decision, 2023, 38(4): 890-901. | |
| [2] | Cui Y, Zeng C, Zhao X, et al. SportsMOT: a large multi-object tracking dataset in multiple sports scenes[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 9921-9931. |
| [3] | Peng J, Wang T, Lin W, et al. TPM: multiple object tracking with tracklet-plane matching[J]. Pattern Recognition, 2020, 107: No.107480. |
| [4] | Ren W, Wang X, Tian J, et al. Tracking-by-counting: using network flows on crowd density maps for tracking multiple targets[J]. IEEE Transactions on Image Processing, 2020, 30: 1439-1452. |
| [5] | Shi J. Good features to track[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, USA, 1994: 593-600. |
| [6] | Broida T J, Chellappa R. Estimation of object motion parameters from noisy images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986(1): 90-99. |
| [7] | Isard M, Blake A. Condensation—conditional density propagation for visual tracking[J]. International Journal of Computer Vision, 1998, 29(1): 5-28. |
| [8] | Nummiaro K, Koller-meier E, Van Gool L. An adaptive color-based particle filter[J]. Image and Vision Computing, 2003, 21(1): 99-110. |
| [9] | 杨欣, 刘加, 周鹏宇, 等.基于多特征融合的粒子滤波自适应目标跟踪算法[J]. 吉林大学学报: 工学版,2015, 45(2): 533-539. |
| Yang Xin, Liu Jia, Zhou Peng-yu, et al. Adaptive particle filter for object tracking based on fusing multiple features[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(2): 533-539. | |
| [10] | Comaniciu D, Ramesh V, Meer P. Real-time tracking of non-rigid objects using mean shift[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head, USA, 2000: 142-149. |
| [11] | Jeyakar J, Babu R V, Ramakrishnan K. Robust object tracking with background-weighted local kernels[J]. Computer Vision and Image Understanding, 2008, 112(3): 296-309. |
| [12] | Bolme D S, Beveridge J, Draper B A, et al. Visual object tracking using adaptive correlation filters[C]∥Proceedings of the IEEE Conference on Computer V-ision and Pattern Recognition, San Francisco, USA, 2010: 2544-2550. |
| [13] | Henriques J F, Caseiro R, Martins P, et al. Exploitin-g the circulant structure of tracking-by-detection with kernels[C]∥European Conference on Computer Vision, Florence, Italy, 2012: 702-715. |
| [14] | Danelljan M, Shahbaz K F, Felsberg M, et al. Adaptive color attributes for real-time visual tracking[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, USA, 2014: 1090-1097. |
| [15] | Zhang K, Zhang L, Liu Q, et al. Fast visual tracking via dense spatio-temporal context learning[C]∥Euro-pean Conference on Computer Vision, Zürich, Swiss-Confederation, 2014: 127-141. |
| [16] | Krizhevsky A, Sutskever I, Hinton G. Imagenet classification with deep convolutional neural networks[J]. Advances in Neural Information Processing Systems, 2012, 60: 84-90. |
| [17] | Ren S, He K, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(6): 1137-1149. |
| [18] | Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector[C]∥European Conference on Computer Vision, Amsterdam, Netherland, 2016: 21-37. |
| [19] | Bewley A, Ge Z, Ott L, et al. Simple online and realtime tracking[C]∥IEEE International Conference on Image Processing (ICIP). Phoenix, USA, 2016: 3464-3468. |
| [20] | He K, Gkioxari G, Dollár P, et al. Mask R-CNN[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Venice, Italy, 2017: 2961-2969. |
| [21] | Zhou Z, Xing J, Zhang M, et al. Online multi-target tracking with tensor-based high-order graph matchin-g[C]∥24th International Conference on Pattern Recognition (ICPR), Bejing, China, 2018: 1809-1814. |
| [22] | Zhao D, Fu H, Xiao L, et al. Multi-object tracking with correlation filter for autonomous vehicle[J]. Sensors, 2018, 18(7): 2004. |
| [23] | Zhang Y, Sun P, Jiang Y, et al. Bytetrack: multi-object tracking by associating every detection box[C]∥European Conference on Computer Vision, Tel Aviv, The State of Israel, 2022: 1-21. |
| [24] | Ge Z, Liu S, Wang F, et al. YOLOX: exceeding yo-lo series in 2021[DB/OL]. [2021-08-06]. . |
| [25] | Sun S J, Akhtar N, Song H S, et al. Deep affinity network for multiple object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 43(1): 104-119. |
| [26] | Yu F, Li W, Li Q, et al. POI: multiple object tracking with high performance detection and appearance feature[C]∥Computer Vision-ECCV 2016 Workshops, Amsterdam, The Netherlands, 2016: 36-42. |
| [27] | Huang K, Sun B, Chen F, et al. Reidtrack: multi-object track and segmentation without motion[DB/OL]. [2023-08-03]. . |
| [28] | Kim C, Fu X L, Alotaibi M, et al. Discriminative appearance modeling with multi-track pooling for real-time multi-object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2021: 9553-9562. |
| [29] | Cao J, Pang J, Weng X, et al. Observation-centric sort: rethinking sort for robust multi-object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 9686-9696. |
| [30] | Han S, Huang P, Wang H, et al. MAT: motion-aware multi-object tracking[J]. Neurocomputing, 2022, 476: 75-86. |
| [31] | Qin Z, Zhou S, Wang L, et al. Motiontrack: learning robust short-term and long-term mo-tions for multi-object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 17939-17948. |
| [32] | Larsen M, Rolfsjord S, Gusland D, et al. Base: probably a better approach to multi-object track-ing[DB/OL]. [2023-09-21]. |
| [33] | Wojke N, Bewley A, Paulus D. Simple online and realtime tracking with a deep association metric[C]∥2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 2017: 3645-3649. |
| [34] | Karunasekera H, Wang H, Zhang H. Multiple object tracking with attention to appearance, structure, motion and size[J]. IEEE Access, 2019, 7: 104423-104434. |
| [35] | Seidenschwarz J, Brasó G, Serrano V, et al. Simple cues lead to a strong multi-object tracker[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 13813-13823. |
| [36] | Yang M, Han G, Yan B, et al. Hybrid-sort: weak cues matter for online multi-object tracking[C]∥Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, Canada, 2024: 6504-6512. |
| [37] | Li J, Gao X, Jiang T. Graph networks for multiple object tracking[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Snowmass Village, USA, 2020: 719-728. |
| [38] | Brasó G, Leal-taixé L. Learning a neural solver for multiple object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2020: 6247-6257. |
| [39] | Liu Q, Chu Q, Liu B, et al. GSM: graph similarity model for multi-object tracking[C]∥Proceedings of the Twenty-Ninth International Joint Conference on Artificial Intelligence, Yokohama, Japan, 2020: 530-536. |
| [40] | Cetintas O, Brasó G, Leal-taixé L. Unifying short and long-term tracking with graph hierarchies[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 22877-22887. |
| [41] | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]∥Advances in Neural Information Processing Systems, Long Beach, USA, 2017: 5999-6009. |
| [42] | Sun P, Cao J, Jiang Y, et al. Transtrack: multiple o-bject tracking with transformer[DB/OL]. [2021-05-04].. |
| [43] | Meinhardt T, Kirillov A, Leal-taixe L, et al. Trackformer: multi-object tracking with transformers[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 8844-8854. |
| [44] | Carion N, Massa F, Synnaeve G, et al. End-to-end object detection with transformers[C]∥European Conference on Computer Vision, Virtual, 2020: 213-229. |
| [45] | Xu Y, Ban Y, Delorme G, et al. TransCenter: transformers with dense representations for multiple-object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 45(6): 7820-7835. |
| [46] | Chu P, Wang J, You Q, et al. Transmot: spatial-temporal graph transformer for multiple object tracking[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, USA, 2023: 4870-4880. |
| [47] | Zeng F, Dong B, Zhang Y, et al. MOTR: end-to-end multiple-object tracking with transformer[C]∥European Conference on Computer Vision, Tel Aviv, The State of Israel, 2022: 659-675. |
| [48] | Zhang Y, Wang T, Zhang X. MOTRv2: bootstrapping end-to-end multi-object tracking by pretrained object detectors[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 22056-22065. |
| [49] | Gao R, Wang L. MeMOTR: long-term memory-augmented transformer for multi-object tracking[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 9901-9910. |
| [50] | Bertinetto L, Valmadre J, Henriques J, et al. Fully-convolutional siamese networks for object tracking[C]∥European Conference on Computer Vision, Amsterdam, Netherland, 2016: 850-865. |
| [51] | Xu Y, Osep A, Ban Y, et al. How to train your deep multi-object tracker[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2020: 6787-6796. |
| [52] | Bergmann P, Meinhardt T, Leal-Taixe L. Tracking without bells and whistles[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Long Beach, USA, 2019: 941-951. |
| [53] | Pang J, Qiu L, Li X, et al. Quasi-dense similarity learning for multiple object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2021: 164-173. |
| [54] | Gao X, Shen Z, Yang Y. Multi-object tracking with siamese-RPN and adaptive matching strategy[J]. Signal, Image and Video Processing, 2022, 16(4): 965-973. |
| [55] | Shuai B, Berneshawi A, Li X, et al. SiamMOT: siamese multi-object tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2021: 12372-12382. |
| [56] | Zhou X, Koltun V, Krähenbühl P. Tracking objects as points[C]∥European Conference on Computer Vision, Virtual, 2020: 474-490. |
| [57] | Wang Z, Zheng L, Liu Y, et al. Towards real-time multi-object tracking[C]∥European Conference on Computer Vision, Virtual, 2020: 107-122. |
| [58] | Lu Z, Rathod V, Votel R, et al. Retinatrack: online single stage joint detection and tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 2020: 14668-14678. |
| [59] | Lin T, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Venice, Italy, 2017: 2980-2988. |
| [60] | 曲优, 李文辉. 基于多任务联合学习的多目标跟踪方法[J]. 吉林大学学报: 工学版, 2023, 53(10): 2932-2941. |
| Qu you, Li Wen-hui. Multiple object tracking method based on multi-task joint learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(10): 2932-2941. | |
| [61] | Liang C, Zhang Z, Zhou X, et al. Rethinking the competition between detection and reid in multiobject tracking[J]. IEEE Transactions on Image Processing, 2022, 31: 3182-3196. |
| [62] | Zhang Y, Wang C, Wang X, et al. FairMOT: on the fairness of detection and re-identification in multiple object tracking[J]. International Journal of Computer Vision, 2021, 129: 3069-3087. |
| [63] | Duan K, Bai S, Xie L, et al. Centernet: keypoint triplets for object detection[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, South Korea, 2019: 6569-6578. |
| [64] | Liang T, Li B, Wang M, et al. A closer look at the joint training of object detection and re-identification in multi-object tracking[J]. IEEE Transactions on Image Processing, 2022, 32: 267-280. |
| [65] | Bernardin K, Stiefelhagen R. Evaluating multiple object tracking performance: the clear mot metrics[J]. EURASIP Journal on Image and Video Processing, 2008, 2008: 1-10. |
| [66] | Ristani E, Solera F, Zou R, et al. Performance measures and a data set for multi-target, multi-camera tracking[C]∥European Conference on Computer Vision, Amsterdam, Netherland, 2016: 17-35. |
| [67] | Luiten J, Osep A, Dendorfer P, et al. HOTA: a higher order metric for evaluating multi-object tracking[J]. International Journal of Computer Vision, 2021, 129: 548-578. |
| [68] | Geiger A, Lenz P, Urtasun R. Are we ready for autonomous driving? the kitti vision benchmark suite[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Providence, USA, 2012: 3354-3361. |
| [69] | Leal-taixé L, Milan A, Reid I, et al. MOTchallenge 2015: Towards a benchmark for multi-target tracking[DB/OL]. [2015-04-08]. . |
| [70] | Milan A, Leal-taixé L, Reid I, et al. MOT16: a benchmark for multi-object tracking[DB/OL]. [2016-05-03]. . |
| [71] | Dendorfer P, Rezatofighi H, Milan A, et al. MOT20: a benchmark for multi object tracking in cro-wded scenes[DB/OL]. [2020-03-19]. . |
| [72] | Sun P, Cao J, Jiang Y, et al. Dancetrack: multi-object tracking in uniform appearance and diverse motion[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 20993-21002. |
| [1] | 姚宗伟,陈辰,高振云,靳鸿鹏,荣浩,李学飞,黄虹溥,毕秋实. 基于合成图像数据集的挖掘机关键点识别[J]. 吉林大学学报(工学版), 2026, 56(1): 76-85. |
| [2] | 王琳虹,刘宇阳,刘子昱,鹿应佳,张宇恒,黄桂树. 基于YOLOv5的轻量化桥梁缺陷识别[J]. 吉林大学学报(工学版), 2025, 55(9): 2958-2968. |
| [3] | 廉敬,张继保,刘冀钊,张家骏,董子龙. 基于文本引导的人脸图像修复[J]. 吉林大学学报(工学版), 2025, 55(8): 2732-2740. |
| [4] | 刘元宁,王星喆,黄子彧,张家晨,刘震. 基于多模态数据融合的胃癌患者生存预测模型[J]. 吉林大学学报(工学版), 2025, 55(8): 2693-2702. |
| [5] | 袁靖舒,李武,赵兴雨,袁满. 基于BERTGAT-Contrastive的语义匹配模型[J]. 吉林大学学报(工学版), 2025, 55(7): 2383-2392. |
| [6] | 徐慧智,郝东升,徐小婷,蒋时森. 基于深度学习的高速公路小目标检测算法[J]. 吉林大学学报(工学版), 2025, 55(6): 2003-2014. |
| [7] | 张汝波,常世淇,张天一. 基于深度学习的图像信息隐藏方法综述[J]. 吉林大学学报(工学版), 2025, 55(5): 1497-1515. |
| [8] | 侯越,郭劲松,林伟,张迪,武月,张鑫. 分割可跨越车道分界线的多视角视频车速提取方法[J]. 吉林大学学报(工学版), 2025, 55(5): 1692-1704. |
| [9] | 文斌,丁弈夫,杨超,沈艳军,李辉. 基于自选择架构网络的交通标志分类算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1705-1713. |
| [10] | 李健,刘欢,李艳秋,王海瑞,关路,廖昌义. 基于THGS算法优化ResNet-18模型的图像识别[J]. 吉林大学学报(工学版), 2025, 55(5): 1629-1637. |
| [11] | 李振江,万利,周世睿,陶楚青,魏巍. 基于时空Transformer网络的隧道交通运行风险动态辨识方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1336-1345. |
| [12] | 刘广文,赵绮莹,王超,高连宇,才华,付强. 基于渐进递归的生成对抗单幅图像去雨算法[J]. 吉林大学学报(工学版), 2025, 55(4): 1363-1373. |
| [13] | 刘广文,谢欣月,付强,才华,王伟刚,马智勇. 基于时空模板焦点注意的Transformer目标跟踪算法[J]. 吉林大学学报(工学版), 2025, 55(3): 1037-1049. |
| [14] | 程德强,刘规,寇旗旗,张剑英,江鹤. 基于自适应大核注意力的轻量级图像超分辨率网络[J]. 吉林大学学报(工学版), 2025, 55(3): 1015-1027. |
| [15] | 赵孟雪,车翔玖,徐欢,刘全乐. 基于先验知识优化的医学图像候选区域生成方法[J]. 吉林大学学报(工学版), 2025, 55(2): 722-730. |
|
||