吉林大学学报(工学版) ›› 2026, Vol. 56 ›› Issue (1): 54-63.doi: 10.13229/j.cnki.jdxbgxb.20240700
半挂汽车列车挂车转向控制方法
王硕( ),王文军(),成波
),王文军(),成波
- 清华大学 车辆与运载学院,北京 100084
Semitrailer steering control method for tractor-semitrailers
Shuo WANG(),Wen-jun WANG(),Bo CHENG
- School of Vehicle and Mobility,Tsinghua University,Beijing 100084,China
摘要:
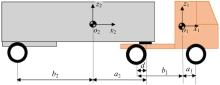
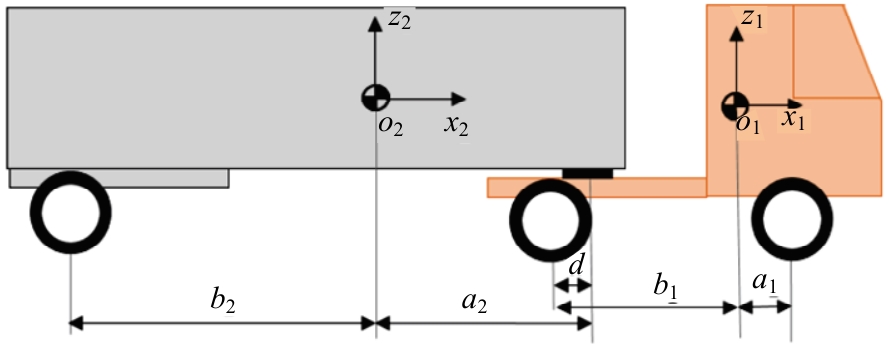
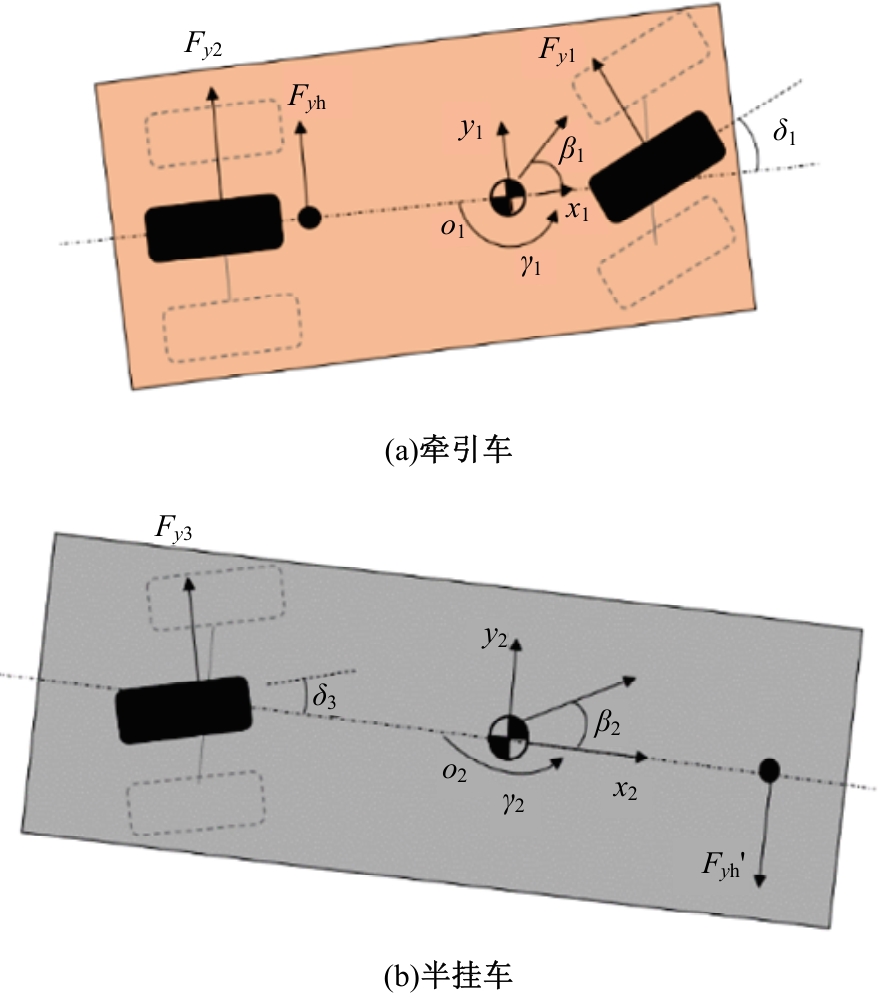
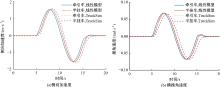
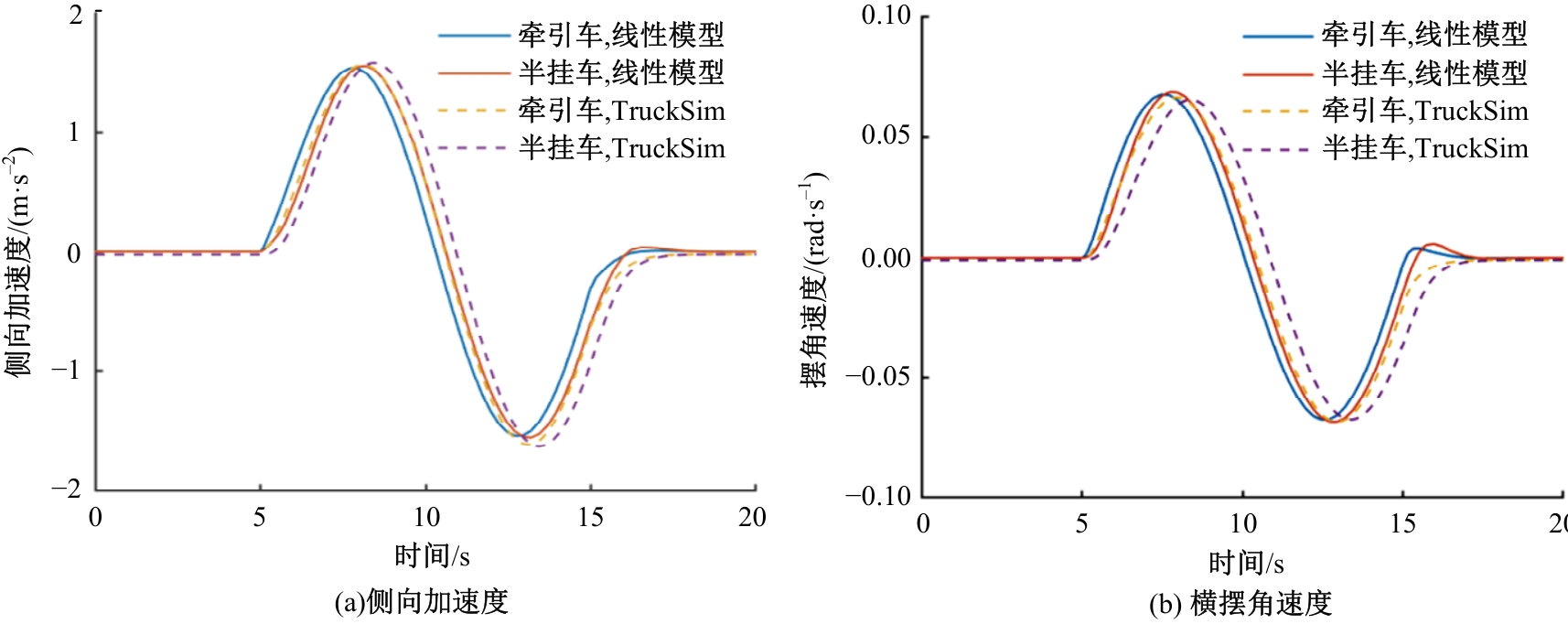
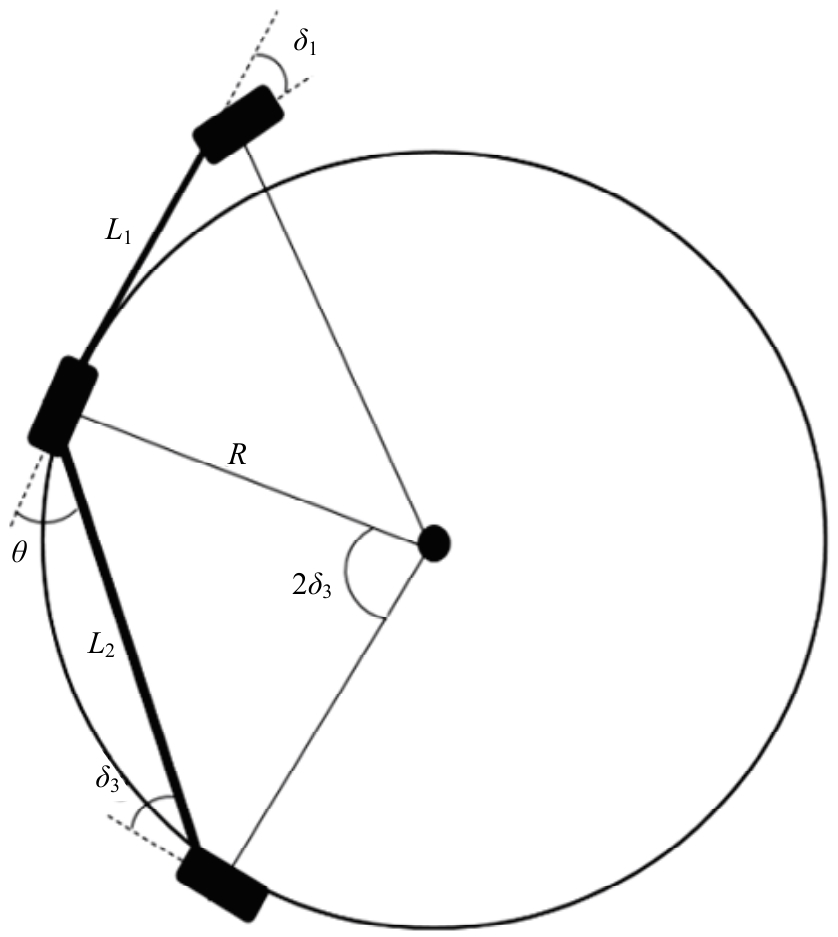
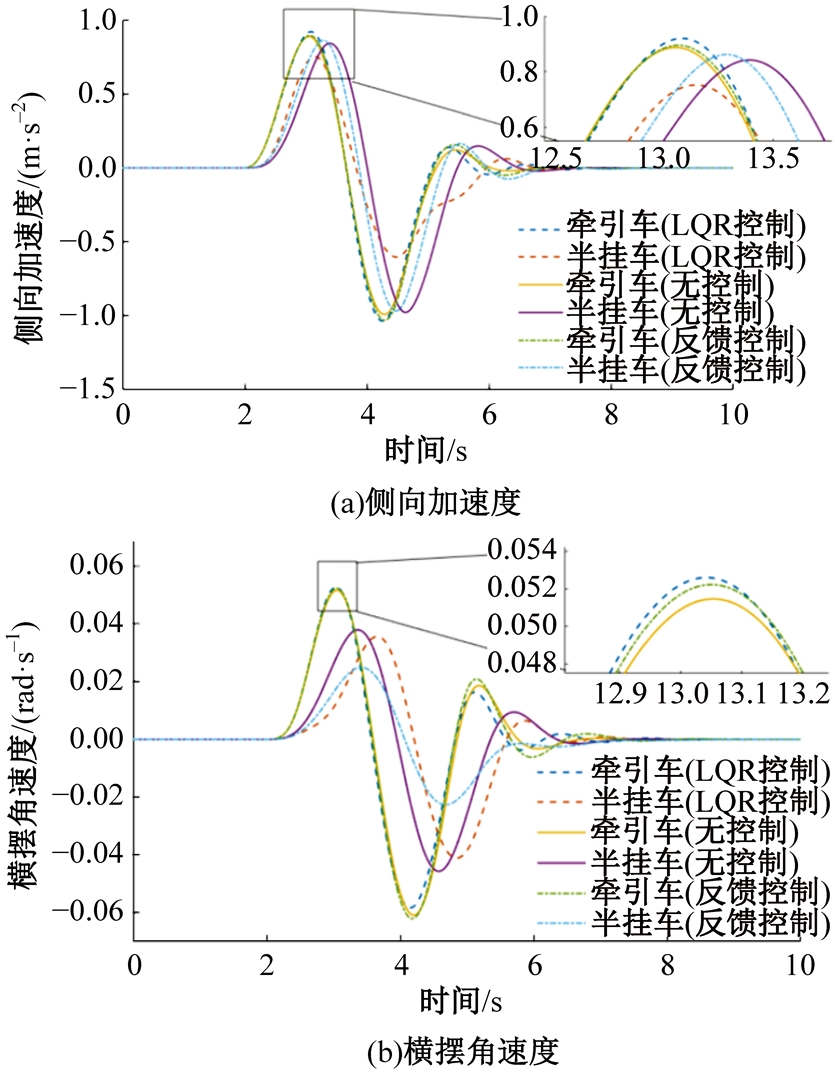
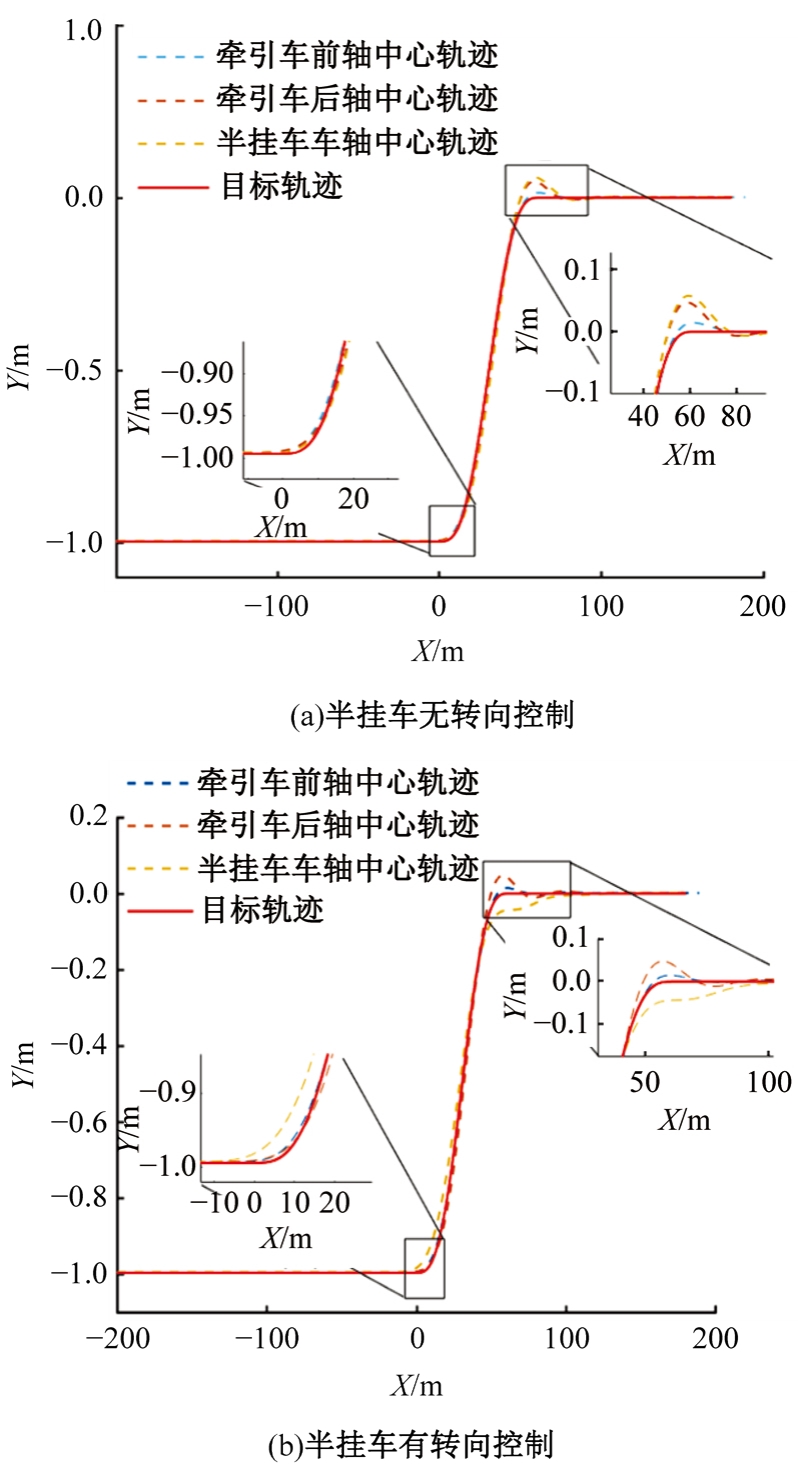
为解决半挂汽车列车低速转向轨迹偏差和高速移线稳定性问题,采用半挂车转向控制方法,根据车间夹角推导出半挂车车轮转角,通过半挂车转向解决其低速转向时的轨迹偏差问题。同时,参考半挂车横摆角速度反馈计算半挂车车轮转角,通过半挂车转向控制解决其高速移线工况下的横向稳定性问题。最后,采用TruckSim中的半挂汽车列车动力学模型,分别在低速圆形转弯工况和高速单移线工况下进行仿真。仿真结果表明:本文提出的半挂车转向方法可将轨迹跟随偏差减小92.3%,将半挂车的横摆角速度降低33.4%。本研究为半挂汽车列车的轨迹偏差和稳定性控制提出了一种解决方案,并为进一步发展大型、长编组汽车列车提供参考。
中图分类号:
- U469






| [1] | Backman H, Nordstroem R. Improved performance of European long haulage transport[R]. Linköping:TFK Rapport, 2002. |
| [2] | Jujnovich B A, Cebon D. Path-following steering control for articulated vehicles[J]. Journal of Dynamic Systems Measurement & Control, 2013, 135(3): No.031006. |
| [3] | Bako S, Dogo J N, Umar M B, et al. Improving the stability of semi-trailer articulated vehicles[J]. International Journal of Research in Science& Engineering (IJRISE), 2023,3(4): 2394-8299. |
| [4] | Esmaeili N, Kazemi R, Tabatabaei Oreh S H. Design of a new integrated controller (braking and steering) to maintain the stability of a long articulated vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2020, 234(5):981-1013. |
| [5] | Wenwei W, Wei Z, Hanyu Z, et al. Yaw stability control through independent driving torque control of mid and rear wheels of an articulated bus[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2020, 234(13): 2947-2960. |
| [6] | Deng Z W, Zhao Q X, Zhao Y Q, et al. Active LQR multi-axle-steering method for improving maneuverability and stability of multi-trailer articulated heavy vehicles[J]. International Journal of Automotive Technology, 2022, 23(4): 939-955. |
| [7] | Kharrazi S, Lidberg M, Fredriksson J. A generic controller for improving lateral performance of heavy vehicle combinations[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(5): 619-642. |
| [8] | Li B, Rakheja S.Jackknifing prevention of tractor-semitrailer combination using active braking control [C]∥SAE Paper, 2015-2746. |
| [9] | Hac A, Fulk D, Chen H. Stability and control considerations of vehicle-trailer combination[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2008, 1(1): 925-937. |
| [10] | Shamim R, Islam M M, He Y. A comparative study of active control strategies for improving lateral stability of car-trailer systems [C]∥SAE Paper,2011-0959. |
| [11] | Vempaty S, He Y, Zhao L. An overview of control schemes for improving the lateral stability of car-trailer combinations[J]. International Journal of Vehicle Performance, 2020, 6(2): 151-199. |
| [12] | Wang B, Zha H, Zhong G, et al. Integrated active steering control strategy for autonomous articulated vehicles[J]. International Journal of Heavy Vehicle Systems, 2020, 27(5): 565-599. |
| [13] | Cheng C, Cebon D. Improving roll stability of articulated heavy vehicles using active semi-trailer steering [J]. Vehicle System Dynamics, 2008,46(Sup.1): 373-388. |
| [14] | Kim K, Guan H, Wang B, et al. Active steering control strategy for articulated vehicles[J]. Frontiers of Information Technology & Electronic Engineering,2016, 17(6): 576-586. |
| [15] | Milani S, Samim Ünlüsoy Y, Marzbani H, et al. Semitrailer steering control for improved articulated vehicle manoeuvrability and stability[J]. Nonlinear Engineering, 2019, 8(1): 568-581. |
| [16] | 宋年秀, 苏建, 苏丽俐, 等. 半挂汽车列车弯道行驶工况下轴偏角对行驶稳定性影响的仿真分析[J]. 汽车技术, 2010(2): 33-37. |
| Song Nian-xiu, Su Jian, Su Li-li, et al. Analysis on the influence of axial deviation angle on driving stability when semi-trailer train running in a curve[J]. Automotive Technology, 2010(2): 33-37. | |
| [17] | 徐晓美, 石静, 王芃, 等. 拖挂式运材车挂车后轮转向技术研究[J]. 林业工程学报,2017, 2(6):110-115. |
| Xu Xiao-mei, Shi Jing, Wang Peng, et al. Rear wheel steering technoloty study on the trailer of timber transport vehicles[J]. Journal of Forestry Engineering, 2017, 2(6):110-115. | |
| [18] | Islam M M, Ding X, He Y. A closed- loop dynamic simulation-based design method for articulated heavy vehicles with active trailer steering systems[J]. Vehicle System Dynamics, 2012,50(5): 675-697. |
| [19] | 邓召文, 孔昕昕, 高伟. 半挂汽车列车多轴主动转向控制策略研究[J]. 重庆交通大学学报:自然科学版, 2023, 42(8):139-146. |
| Deng Zhao-wen, Kong Xin-xin, Gao Wei. Multi-axis active steering control strategy of semi-trailer trains [J]. Journal of Chongqing Jiaotong University(Natural Science Edition), 2023, 42(8):139-146. | |
| [20] | 徐晓美, 张磊, 刘凯, 等.半挂汽车列车挂车主动转向控制研究[J]. 汽车技术, 2018(11): 36-40. |
| Xu Xiao-mei, Zhang Lei, Liu Kai, et al. Research on active steering control of trailer wheels for a tractor-semitrailer[J]. Automobile Technology, 2018(11): 36-40. | |
| [21] | 代馥光. 半挂汽车列车路径跟随控制研究 [D] .长春: 长春工业大学机电工程学, 2018. |
| Dai Fu-guang. Research on the path following control of tractor-semitrailer[D]. Changchun: School of Mechanical and Electrical Engineering, Changchun University of Technology, 2018. | |
| [22] | 张楷祥, 周庆辉. 半挂汽车列车高速变道横向稳定性控制研究[J]. 现代制造工程, 2022(4): 68-75. |
| Zhang Kai-xiang, Zhou Qing-hui. Lateral stability control of high-speed lane change of semi-trailer train [J]. Modern Manufacturing Engineering, 2022(4):68-75. | |
| [23] | Milani S, Samim Ünlüsoy Y, Marzbani H, et al. Semitrailer steering control for improved articulated vehicle manoeuvrability and stability[J]. Nonlinear Engineering, 2019, 8(1): 568-581. |
| [24] | Bahaghighat M K, Kharrazi S, Lidberg M, et al. Predictive yaw and lateral control in long heavy vehicles combinations[C]∥The 49th IEEE Conference on Decision and Control(CDC), Atlanta, USA, 2010: 6403-6408. |
| [25] | Emheisen M A, Emirler M T, Ozkan B. Lateral stability control of articulated heavy vehicles based on active steering system[J]. International Journal of Mechanical Engineering and Robotics Research, 2022, 11(8): 575-582. |
| [26] | 李洪雪, 李世武, 孙文财, 等. 考虑垂向-侧向运动的半挂列车动力学建模及分析[J]. 吉林大学学报: 工学版, 2021, 51(2): 549-556. |
| Li Hong-xue, Li Shi-wu, Sun Wen-cai, et al. Dynamic modeling and analysis of semi-trailers considering ride and lateral motions[J]. Journal of Jilin University(Engineering and Technology Edition),2021,51(2):549-556. | |
| [27] | . 汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值 [S] . |
| [28] | ISO 14791:2000-04. |
| Road vehicles—Heavy commercial vehicle combinations and articulated buses—Lateral stability test methods [S]. |
| [1] | 李文博,谢华城,于树友,林宝君,陈虹. 基于分布式模型预测的商用车队列避障控制[J]. 吉林大学学报(工学版), 2026, 56(1): 247-256. |
| [2] | 郭艳萍,高云,周建慧. 基于链路状态的卫星通信多模态动态拥塞控制算法[J]. 吉林大学学报(工学版), 2026, 56(1): 257-264. |
| [3] | 沈淳,李壮,孟晋,孙潇伟,张成春,陈正武,梁东. 翼型前缘宏观点阵结构气动噪声控制方法[J]. 吉林大学学报(工学版), 2026, 56(1): 86-95. |
| [4] | 孙鹏远,陈国栋,张慧峰,陈伟轩,刘帅. 基于自适应观测器的氢内燃机排气流量估计[J]. 吉林大学学报(工学版), 2025, 55(9): 2837-2846. |
| [5] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [6] | 王菲,陆恒辉,卢荡. 基于UniTire轮胎模型的车辆稳定性控制[J]. 吉林大学学报(工学版), 2025, 55(9): 2864-2873. |
| [7] | 于树友,刘泽澎,林宝君,陈虹. 基于数据驱动的车辆编队分布式预测控制[J]. 吉林大学学报(工学版), 2025, 55(9): 3056-3068. |
| [8] | 刘玉梅,陈洪鹏,庄娇娇,陈熔,王梦雨. 基于双滑模面的变轨距列车悬挂系统控制方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2902-2912. |
| [9] | 张亚辉,李淦鑫,刘艳玲,胡云峰. 基于高阶全驱的质子交换膜燃料电池阴极进气系统控制方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2791-2801. |
| [10] | 陈光勇,周逸凯,陶楚青,万利,魏巍. 基于天鹰算法的交通自洽能源系统优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2630-2638. |
| [11] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [12] | 袁平,蔡亚夫,戴理朝,董必钦,王磊. 基于锈损单元畸变控制的结构3D荷载路径拓扑搜寻方法[J]. 吉林大学学报(工学版), 2025, 55(7): 2212-2222. |
| [13] | 潘义勇,李烁. 考虑时空不稳定性的行人事故严重程度分析[J]. 吉林大学学报(工学版), 2025, 55(7): 2260-2269. |
| [14] | 赵靖华,刘妲,周宇麒,闻龙,刘倩妤,刘捷,解方喜. 基于高斯过程回归进气量预测的空燃比控制[J]. 吉林大学学报(工学版), 2025, 55(6): 1854-1861. |
| [15] | 潘福全,牛远征,张丽霞,杨金顺,陈秀锋,陈德启. 智能网联环境下无信号交叉口车辆通行控制策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1948-1962. |
|
||