吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2874-2882.doi: 10.13229/j.cnki.jdxbgxb.20250326
• 车辆工程·机械工程 • 上一篇
基于单轮试验的高速星球车动力学仿真保真度优化
贾志成1( ),金敬福1,董新桔1,韩丰地2,江晟2,齐迎春1,邹猛1()
),金敬福1,董新桔1,韩丰地2,江晟2,齐迎春1,邹猛1()
- 1.吉林大学 生物与农业工程学院,长春 130022
2.长春理工大学 空间光电技术研究所,长春 130022
Fidelity optimization of high⁃speed planetary rover dynamics simulation based on single⁃wheel experiment
Zhi-cheng JIA1(),Jing-fu JIN1,Xin-ju DONG1,Feng-di HAN2,Sheng JIANG2,Ying-chun QI1,Meng ZOU1()
- 1.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
2.Institute of Space Optoelectronic Technology,Changchun University of Science and Technology,Changchun 130022,China
摘要:
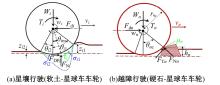
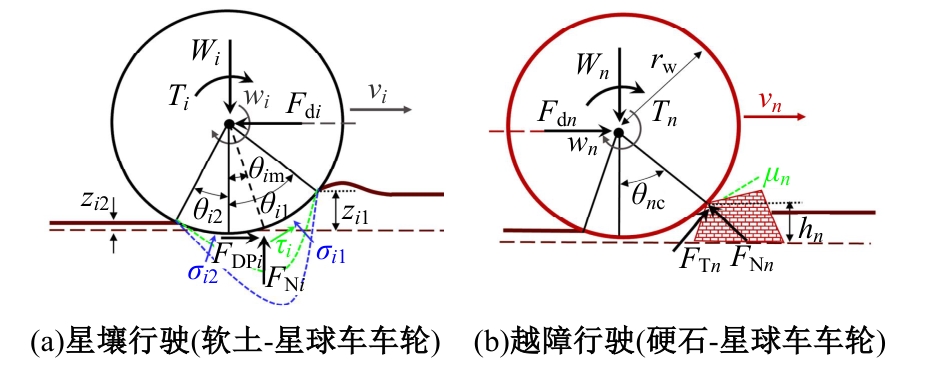
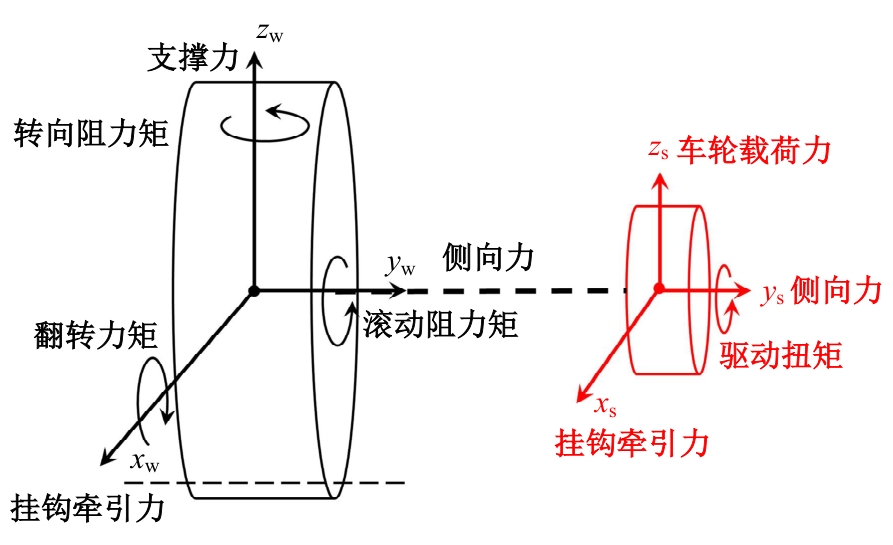
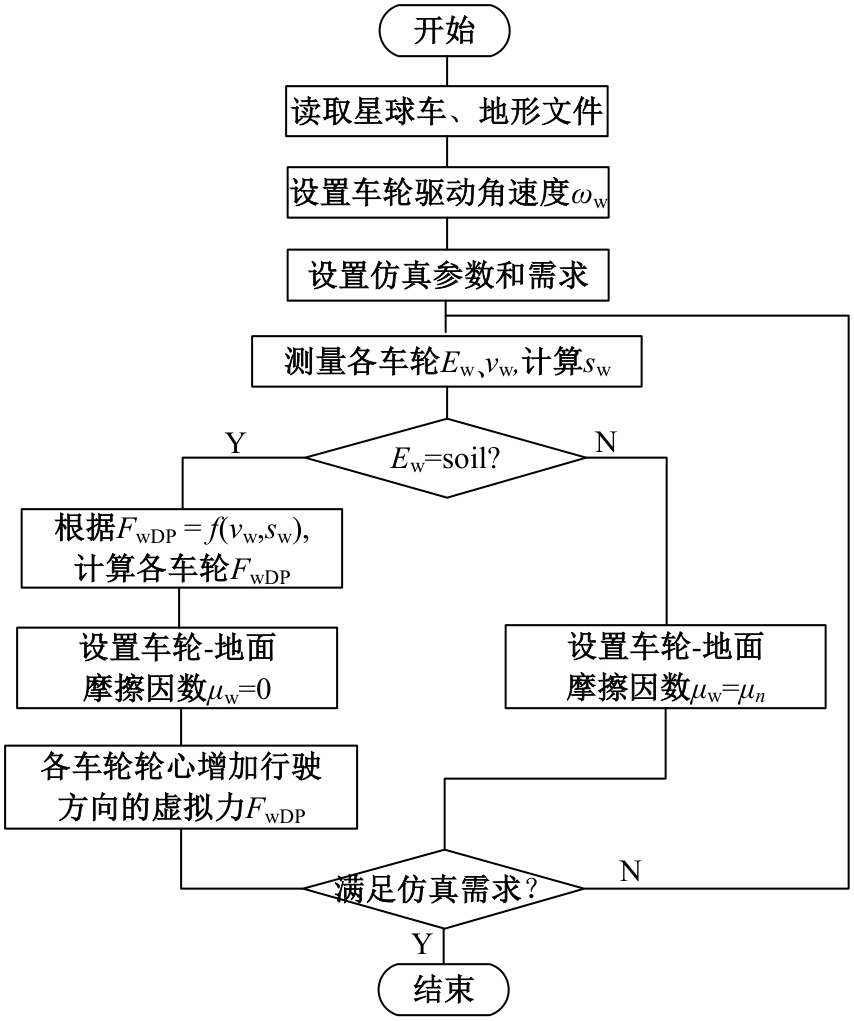
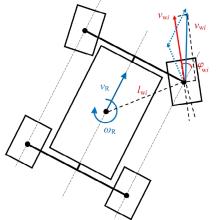
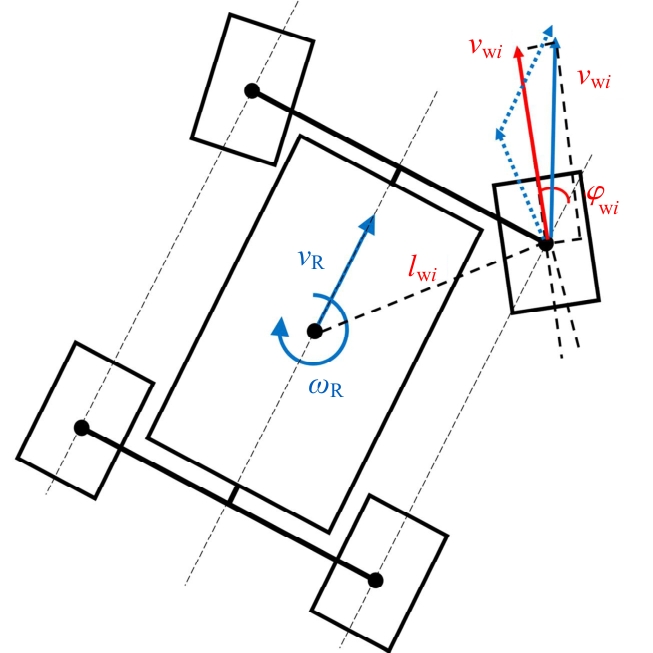
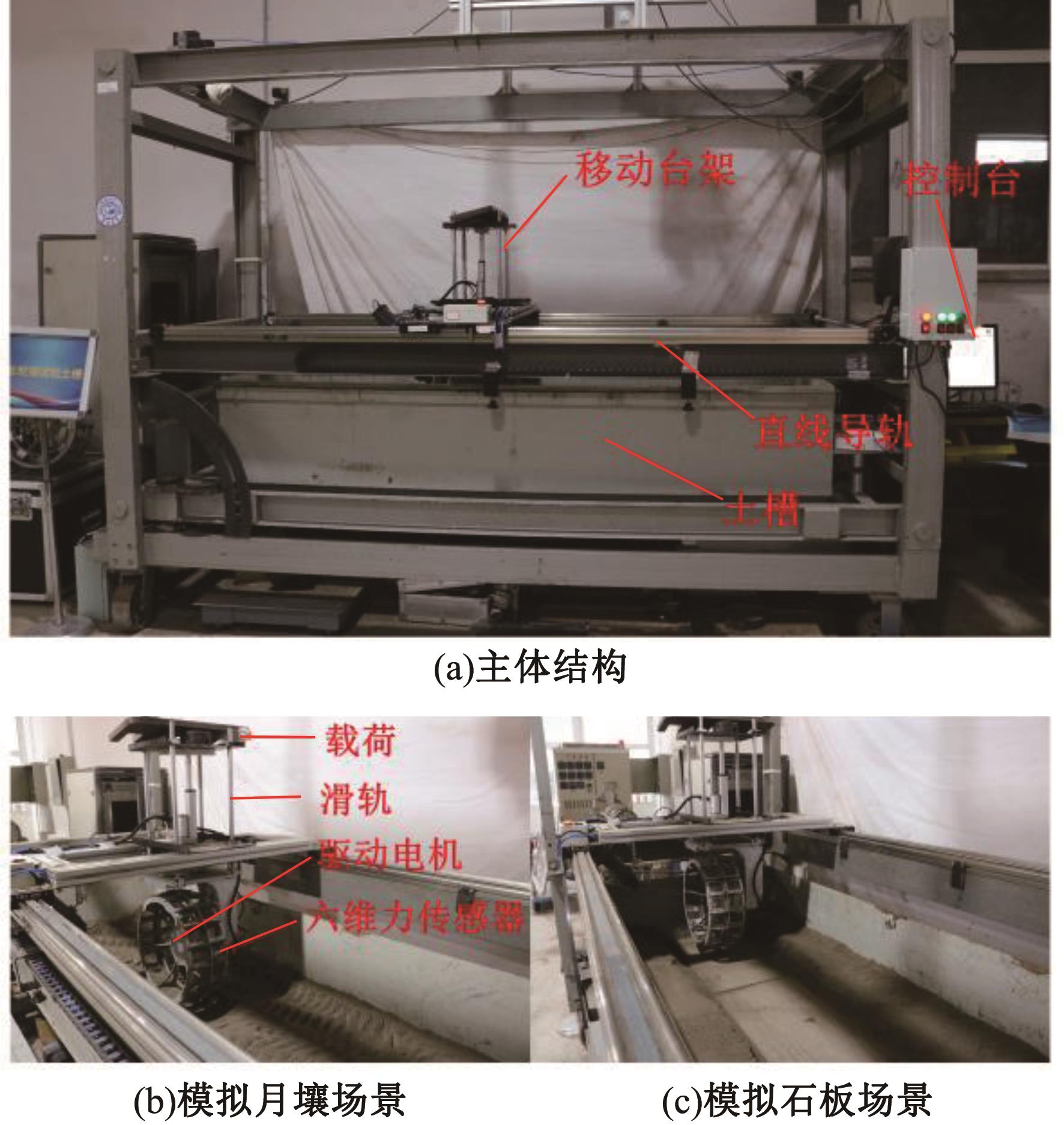
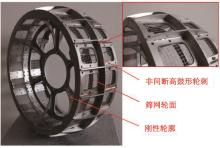
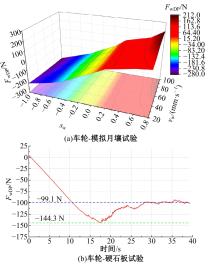
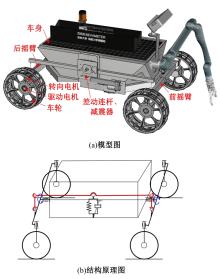
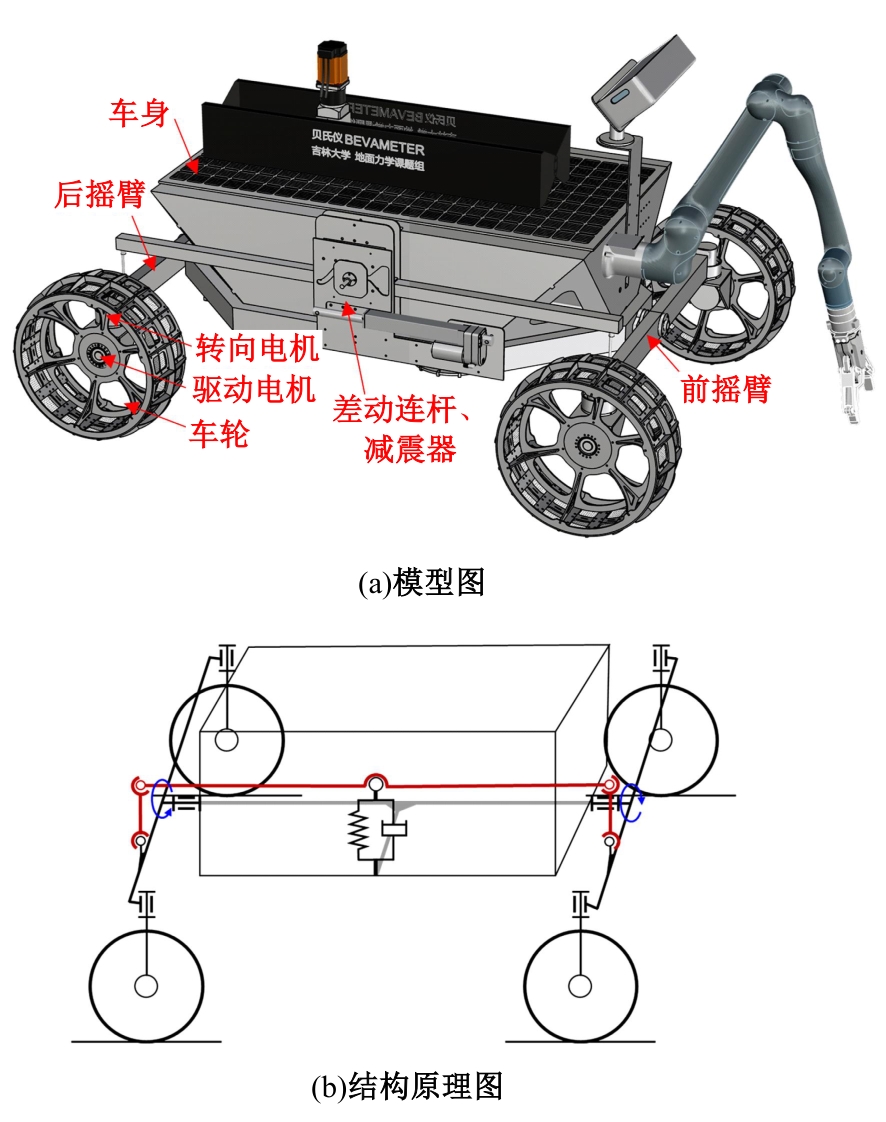
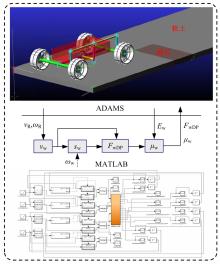
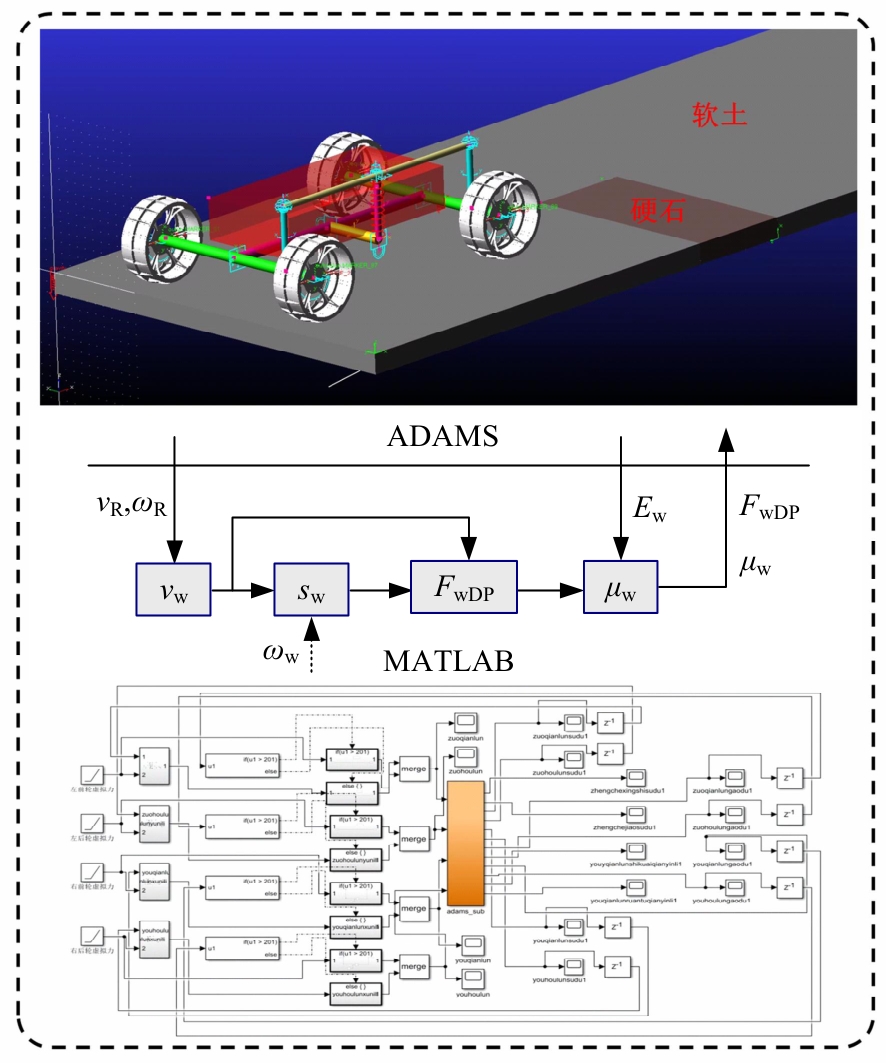
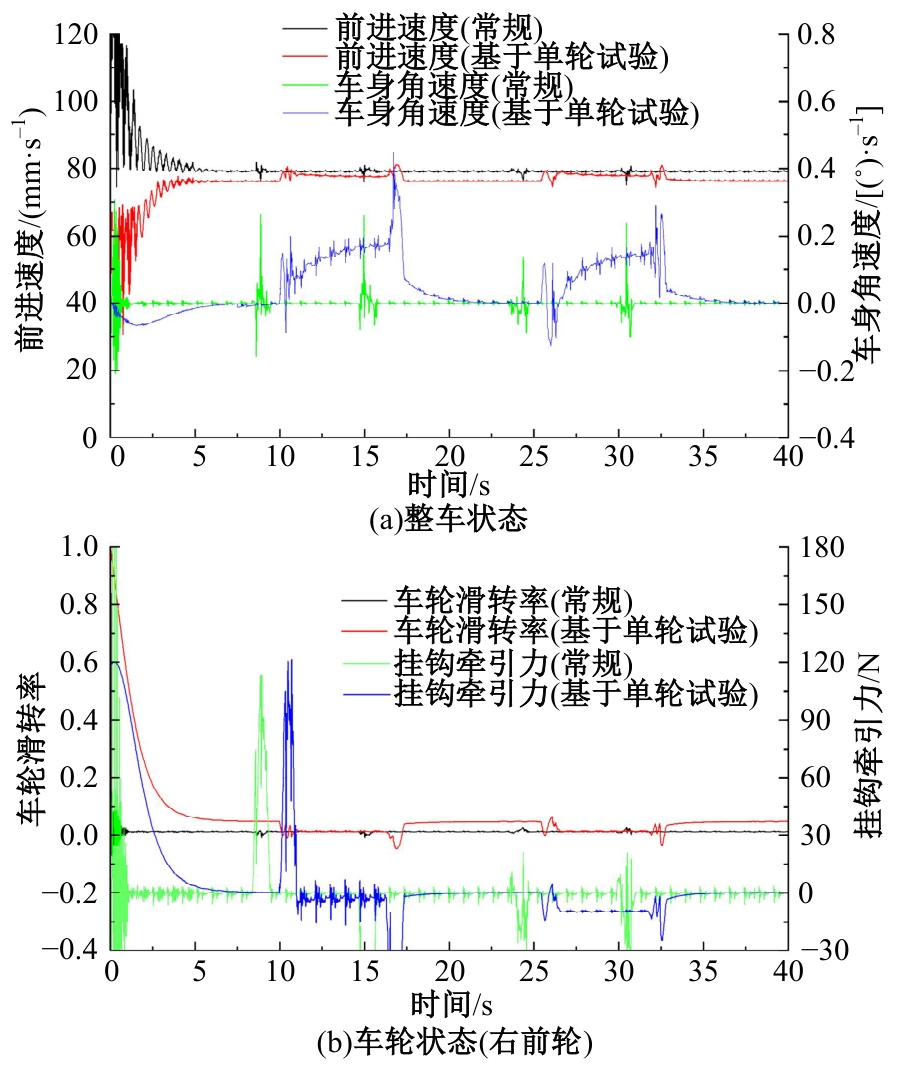
为提高高速星球车动力学仿真对行驶场景和状态的还原度,提出了一种基于单轮试验的整车动力学仿真方法。该方法将星球车单轮试验数据嵌入整车仿真中,以优化仿真保真度。首先,结合星球车动力学建模理论,分析了轮地接触力精度对整车动力学仿真的影响;其次,通过对星球车车轮进行受力分析,明确了挂钩牵引力、摩擦因数等试验-仿真的关联参数;再次,围绕关联参数系统地设计了单轮试验测量方案,确定基于单轮试验的整车动力学仿真原理和流程;最后,为验证该方法的有效性,基于高速星球车样机开展了单轮试验测试以获取参数,并进行整车仿真测试。仿真结果表明,该方法能更好地还原高速星球车起步加速、车身偏航等行驶状态和车轮受力变化,能有效提高整车动力学仿真结果的准确性。
中图分类号:
- V476

| [1] | 贾阳, 孙泽洲, 郑旸,等. 星球车技术发展综述[J]. 深空探测学报, 2020, 7(5): 419-427. |
| Jia Yang, Sun Ze-zhou, Zheng Yang,et al. Overview on development of planetary rover technology[J]. Journal of Deep Space Exploration, 2020, 7(5) : 419-427. | |
| [2] | Sanguino T D M. 50 years of rovers for planetary exploration: a retrospective review for future directions[J]. Robotics and Autonomous Systems, 2017, 94: 172-185. |
| [3] | Lu R C, Gao H B, Liu Z, et al. Design methodology, synthesis, and control strategy of the high-speed planetary rover[J]. Frontiers of Mechanical Engineering, 2024, 19(2): 245-256. |
| [4] | Rodríguez-Martínez D, van Winnendael M, Yoshida K. High-speed mobility on planetary surfaces: A technical review[J]. Journal of Field Robotics, 2019, 36(8): 1436-1455. |
| [5] | 曹剑飞, 梁常春, 王瑞, 等. 载人月球车稳定操控策略设计与优化[J]. 宇航学报, 2023, 44(9): 1379-1391. |
| Cao Jian-fei, Liang Chang-chun, Wang Rui,et al. Design and optimization of stable control strategy for manned lunar rover[J]. Journal of Astronautics, 2023, 44(9): 1379-1391. | |
| [6] | 马龙宇, 王慎泉, 蒋松, 等. 一种扭转式载人月球车及其高速移动性能研究[J]. 宇航学报, 2023, 44(9): 1392-1400. |
| Ma Long-yu, Wang Shen-quan, Jiang Song,et al. Research on a torsional manned lunar rover and its high speed mobility performance[J]. Journal of Astronautics, 2023, 44(9): 1392-1400. | |
| [7] | 党兆龙, 邹猛, 宋家锋, 等.模拟火壤结壳及其力学性能[J].吉林大学学报:工学版, 2024, 54(8): 2393-2400. |
| Dang Zhao-long, Zou Meng, Song Jia-feng,et al. Experimental on mechanical properties of simulated Mars soil crust and its crusting[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(8): 2393-2400. | |
| [8] | 潘冬, 李德伦, 袁宝峰, 等. 火星车系统动力学建模与仿真分析[J].深空探测学报, 2020, 7(5): 437-444. |
| Pan Dong, Li De-lun, Yuan Bao-feng,et al. Dynamics modeling and simulation analysis of Mars rover system[J]. Journal of Deep Space Exploration, 2020, 7(5): 437-444. | |
| [9] | 高大伟, 黄铁球, 邢琰. 六轮摇臂-悬架式星球车全动力学建模与分析[J].航天控制, 2021, 39(1): 46-51. |
| Gao Da-wei, Huang Tie-qiu, Xing Yan. Complete dynamics modeling and analysis of 6-wheel rocker-bogie rover[J]. Aerospace Control, 2021, 39(1): 46-51. | |
| [10] | 徐鸿, 雷波, 刘锦阳. 月球车与月壤交互作用的离散元-多体动力学耦合建模[J].振动与冲击, 2024, 43(4): 239-249. |
| Xu Hong, Lei Bo, Li Jin-yang. DEM-MBD coupled modelling and analysis for the mutual interaction of lunar rover and moon soil[J]. Journal of Vibration and Shock, 2024, 43(4): 239-249. | |
| [11] | Zhang K D, Zhang Y Q, Wu J L, et al. Three-dimensional MFBD-DEM coupling simulation of flexible wire mesh wheel-soil over lunar rough terrain[J]. Computational Particle Mechanics, 2024, 12: 1349-1370. |
| [12] | Zhang Y M, Dai J P, Hu W, et al. Using high fidelity discrete element simulation to calibrate an expeditious terramechanics model in a multibody dynamics framework[J/OL]. [2025-03-25]. |
| [13] | Zhu J Z, Zou M, Shen Y, et al. 3D DEM-FEM simulation of the flexible metal wheel-soil interaction in low gravity environments[J]. Journal of Mechanical Engineering Science, 2022, 237(6): 1267-1278. |
| [14] | Chen L N, Zou M, Chen Z, et al. The applications of soil bin test facilities to terramechanics: a review[J]. Rendiconti Lincei. Scienze Fisiche e Naturali, 2024, 35(3): 683-703. |
| [15] | Du J S, Huang T Q. A method for traction ability research of a rover wheel on mixed planet terrain with movable stones[J]. Space: Science & Technology, 2023, 3: No.0018. |
| [16] | Rodríguez-Martínez D, Uno K, Sawa K, et al. Enabling faster locomotion of planetary rovers with a mechanically-hybrid suspension[J]. IEEE Robotics and Automation Letters, 2024, 9(1): 619-626. |
| [17] | 袁野, 杨怀广, 丁亮, 等. 反映载荷影响的星球车车轮试验及模型研究[J]. 机械工程学报, 2024, 60(14): 263-271. |
| Yuan Ye, Yang Huai-guang, Ding Liang,et al. Experimental study and modeling considering the influence of wheel load for planetary exploration rovers[J]. Journal of Mechanical Engineering, 2024, 60(14): 263-271. | |
| [18] | 翟广龙, 黄铁球. 星球车刚性车轮在混合地形上牵引性能研究[J]. 西北工业大学学报, 2020, 38(6): 1240-1248. |
| Zhai Guang-long, Huang Tie-qiu. Exploring tractive performance of planetary rover's rigid wheels on mixed terrain[J]. Journal of Northwestern Polytechnical University, 2020, 38(6): 1240-1248. |
| [1] | 汪恩良,任志凤,王储,刘君巍,刘兴超,田野,邹猛,卢孜筱,张伟伟,姜生元. 基于灰色关联分析模拟月壤抗压强度性能试验[J]. 吉林大学学报(工学版), 2024, 54(7): 2015-2025. |
| [2] | 胡震宇,申彦,王卫军,罗小桃,邹猛. 基于车辙图像的CE-4月球车挂钩牵引力判别[J]. 吉林大学学报(工学版), 2023, 53(9): 2474-2482. |
| [3] | 田野,李楠楠,刘君巍,姜生元,王储,张伟伟. 基于支持向量机的模拟月壤临界尺度颗粒切削负载识别[J]. 吉林大学学报(工学版), 2023, 53(7): 2143-2151. |
| [4] | 华琛,牛润新,余彪. 地面车辆机动性评估方法与应用[J]. 吉林大学学报(工学版), 2022, 52(6): 1229-1244. |
| [5] | 薛龙,姚猛,李立犇,李因武,邓湘金,李建桥,邹猛. 基于触月压痕的表层月壤力学状态试验分析[J]. 吉林大学学报(工学版), 2022, 52(3): 497-503. |
| [6] | 王康,姚猛,李立犇,李建桥,邓湘金,邹猛,薛龙. 基于月面表取采样触月压痕的月壤力学状态分析[J]. 吉林大学学报(工学版), 2021, 51(3): 1146-1152. |
| [7] | 贾树强, 尚涛, 王昕, 宫文斌, 李琪, 金松哲. 新型摆动式球磨机运动机理及性能[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 71-76. |
| [8] | 郑黎明,杨慎华,邓春萍. 裂解连杆夹钳机构动力学仿真及试验[J]. 吉林大学学报(工学版), 2010, 40(03): 714-0719. |
| [9] | 郭孔辉,金凌鸽,卢荡. 统一轮胎模型在车辆动力学仿真中的应用[J]. 吉林大学学报(工学版), 2009, 39(增刊2): 241-0245. |
| [10] | 张朋,邓宗全,胡明,高海波. 基于地面力学的变质心月球探测车移动性能[J]. 吉林大学学报(工学版), 2009, 39(06): 1573-1578. |
| [11] | 靳立强,王庆年,周雪虎,宋传学 . 电动轮驱动汽车电子差速控制策略及仿真[J]. 吉林大学学报(工学版), 2008, 38(增刊): 1-0006. |
| [12] | 谢哲东,赵继,张雷 . 微小研抛机器人动力学仿真分析与运动实验[J]. 吉林大学学报(工学版), 2008, 38(02): 349-0353. |
| [13] | 靳立强,王庆年,宋传学 . 电动轮驱动汽车动力学仿真模型及试验验证[J]. 吉林大学学报(工学版), 2007, 37(04): 745-750. |
| [14] | 李雯,高峰,孙鹏. 复合材料深空探测车车轮的设计[J]. 吉林大学学报(工学版), 2006, 36(04): 502-505. |
| [15] | 戴文跃, 梁昊. 装载机工作装置的动力学仿真与综合优化设计[J]. 吉林大学学报(工学版), 2004, (4): 602-605. |
|
||